
A Logic Programming Approach to VM Placement
Remo Andreoli
1,∗ a
, Stefano Forti
2,∗ b
, Luigi Pannocchi
2 c
, Tommaso Cucinotta
1 d
and Antonio Brogi
2 e
1
Sant’Anna School of Advanced Studies, Pisa, Italy
2
Department of Computer Science, University of Pisa, Pisa, Italy
Keywords:
VM Placement, Cloud Computing, Resource Management, Declarative Reasoning, Optimization.
Abstract:
Placing virtual machines so to minimize the number of used physical hosts is an utterly important problem
in cloud computing and next-generation virtualized networks. This article proposes a declarative reasoning
methodology, and its open-source prototype, including four heuristic strategies to tackle this problem. Our
proposal is extensively assessed over real data from an industrial case study and compared to state-of-the-art
approaches, both in terms of execution times and solution optimality. As a result, our declarative approach
determines placements that are only 6% far from optimal, outperforming a state-of-the-art genetic algorithm
in terms of execution times, and a first-fit search for optimality of found placements. Last, its pipelining with
a mathematical programming solution improves execution times of the latter by one order of magnitude on
average, compared to using a genetic algorithm as a primer.
1 INTRODUCTION
Recently, the problem of Virtual Machine (VM)
placement gained renewed interest in the field of
telecommunications (Attaoui et al., 2023; Cucinotta
et al., 2022) – with the advent of Network Function
Virtualization (NFV) (Cai et al., 2023), where Vir-
tual Network Functions (VNFs) are deployed in a pri-
vate cloud infrastructure of a network operator – as
well as in cloud-edge settings (Sonkoly et al., 2021)
– having to deal with limited resource capacity of
edge hosts. These paradigms require flexible man-
agement of physical resources, along with the ability
to promptly reconfigure VM allocation in response to
changes in the network state or VM requirements.
In the following, we take the viewpoint of a Telco
provider having to deploy VNFs as a set of VMs
within its NFV infrastructure. Affinity constraints
may be used when low-latency communications are
needed, so to place VMs onto the same host, and anti-
affinity ones when service availability is needed, by
placing VM replicas onto different hosts. The goal of
a
https://orcid.org/0000-0002-3268-4289
b
https://orcid.org/0000-0002-4159-8761
c
https://orcid.org/0000-0002-6250-4939
d
https://orcid.org/0000-0002-0362-0657
e
https://orcid.org/0000-0003-2048-2468
∗
Corresponding authors.
the Telco provider is to minimize the number of used
hosts to reduce operational costs.
Solutions to this type of problem usually employ a
mixed-integer linear programming (MILP) approach
and state-of-the-art (SOTA) solvers to determine an
optimal solution (Filho et al., 2018). However, opti-
mality comes at the price of high execution times and
possibly cumbersome encodings of non-numerical
constraints (e.g. affinities or anti-affinities), espe-
cially in the presence of large infrastructures. More
recently, declarative approaches have been proposed
to heuristically solve application placement problems
in cloud-edge landscapes (Forti et al., 2022). Declar-
ative approaches are more concise than MILP to for-
mulate, easier to extend with new requirements, and
faster on average at determining eligible (yet sub-
optimal) solutions, see e.g. (Massa et al., 2023a).
In this article, we pursue the reconciliation of
declarative approaches with MILP focusing on the
problem of placing VMs onto hosts, providing the
following contributions: i) an open-source declara-
tive Prolog prototype
1
, declPacker, implementing four
heuristic strategies to determine VM placements ac-
counting for hardware, network, and (anti-) affinity
requirements, while reducing the number of hosts; ii)
the integration of our declarative prototype as a way
1
Available at: https://retis.santannapisa.it/
∼
tommaso/
papers/closer24.php
Andreoli, R., Forti, S., Pannocchi, L., Cucinotta, T. and Brogi, A.
A Logic Programming Approach to VM Placement.
DOI: 10.5220/0012729500003711
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 14th International Conference on Cloud Computing and Services Science (CLOSER 2024), pages 319-326
ISBN: 978-989-758-701-6; ISSN: 2184-5042
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
319

to determine an upper-bound on the number of hosts
into a SOTA, MILP solution which employs a genetic
algorithm as its default upper-bounding strategy; and
iii) the assessment of our proposal over real, increas-
ingly complex, problem instances from a Vodafone
industrial use (released in (Cucinotta et al., 2022))
comparing our approach with the SOTA solution w.r.t.
execution times and optimality of found placements.
2 PROBLEM STATEMENT
Consider a network provider that needs to deploy
many VNFs in the form of multiple VMs and mini-
mize the number of hosts. A VNF team is in charge
of sizing the virtualized infrastructure requirements to
support a maximum traffic volume (e.g., connected
users, requests per minute) and to meet the desired
end-to-end latency of deployed service chains. The
capacity planning problem is determined by the num-
ber of interconnected VMs and their characteristics.
The virtualized infrastructure needs to be deployed
onto physical hosts to be provisioned. Providers usu-
ally buy hosts in large batches with identical hardware
specifications, i.e., with the same “host blueprint”,
which fits their needs. With such hardware, the de-
ployment plan specifies how many VMs are needed
to deploy each VNF component, with a given VM
specification (e.g., CPU cores, RAM, network band-
width), and what are their associated affinity and
anti-affinity constraints, useful to meet performance
(i.e., minimizing experienced latencies) and reliabil-
ity (i.e., through VM replicas across distinct hosts)
requirements, respectively.
As an example, consider a lifelike motivating sce-
nario where we have to deploy 6 VMs onto hosts ac-
commodating 44 virtual CPU cores, 420 GB of RAM,
and a network throughput of 15000 Mbps each, net
of the resources used for management purposes. We
consider only CPU, RAM, and network requirements,
similarly to (Cucinotta et al., 2022), as we use the
same open data-set for the evaluation in Sect. 4, al-
beit additional resources can be considered as well.
In this example, the deployment plan consists of
two VMs for each of the following types: i) small, re-
quiring 10 vCPUs, 50 GB of RAM, and a throughput
of 2500 Mbps; ii) medium, requiring 15 vCPUs, 100
GB of RAM, and a throughput of 5000 Mbps; and iii)
large, requiring 30 vCPUs, 200 GB of RAM, and a
throughput of 10000 Mbps.
The provider preferably requires support for
latency-sensitive communications. Hence, it config-
ures an affinity constraint between the small VMs
(vm1, vm2), so that they possibly run on the same host.
We consider affinity constraints as soft, i.e., optional.
To improve the availability of the services offered by
the medium VMs (vm3, vm4), the provider imposes
an anti-affinity constraint among them – i.e., that they
run on different hosts. Anti-affinity constraints are
considered as hard, assuming that the host blueprint
is large enough to accommodate at least one instance
of the large VM (vm5, vm6).
Affinity and anti-affinity requirements can also in-
volve sets of VMs for akin reasons, in such cases
they are called cross-affinity and cross-anti-affinity
constraints. Again, cross-affinity constraints are con-
sidered soft, while cross-anti-affinity constraints are
treated as hard. In our scenario, the infrastructure
provider sets a cross-affinity constraint within small
and medium VMs (to reduce latency among those),
and a cross-anti-affinity constraint among medium
and large VMs (to enhance service availability).
Overall, we tackle the following problem:
Given a set of VMs and a host blueprint, determine
a valid placement of those VMs onto a set of hosts
complying with the blueprint, such that:
(a) it meets all VM requirements in terms of CPU,
RAM and network throughput,
(b) it meets all soft (cross-)affinity constraints and
hard (cross-)anti-affinity constraints, and
(c) it minimizes the number of spanned hosts.
Figure 1 shows an optimal solution to the above
problem instance, featuring 4 hosts. Note that vm1
and vm2 meet their affinity constraint, and that vm3
is deployed along with them to (partially) comply
with the cross-affinity constraints between medium
and small VMs. The anti-affinity constraint between
the medium VMs is obtained by placing vm4 onto a
host by itself. Last, the placement complies with
the cross-anti-affinity constraint between medium and
large by placing vm5 and vm6 onto their hosts.
All these considered, optimally solving the de-
picted VM placement problem incurs exploring a
combinatorial search space, hence worst-case exp-
time complexity, typical of bin-packing (NP-hard)
problems. In the next section, we will present a
declarative solution to such a problem and showcase
it over the illustrated scenario.
3 METHODOLOGY
In this section, we discuss and illustrate the feature
of our declarative methodology and associated open-
CLOSER 2024 - 14th International Conference on Cloud Computing and Services Science
320
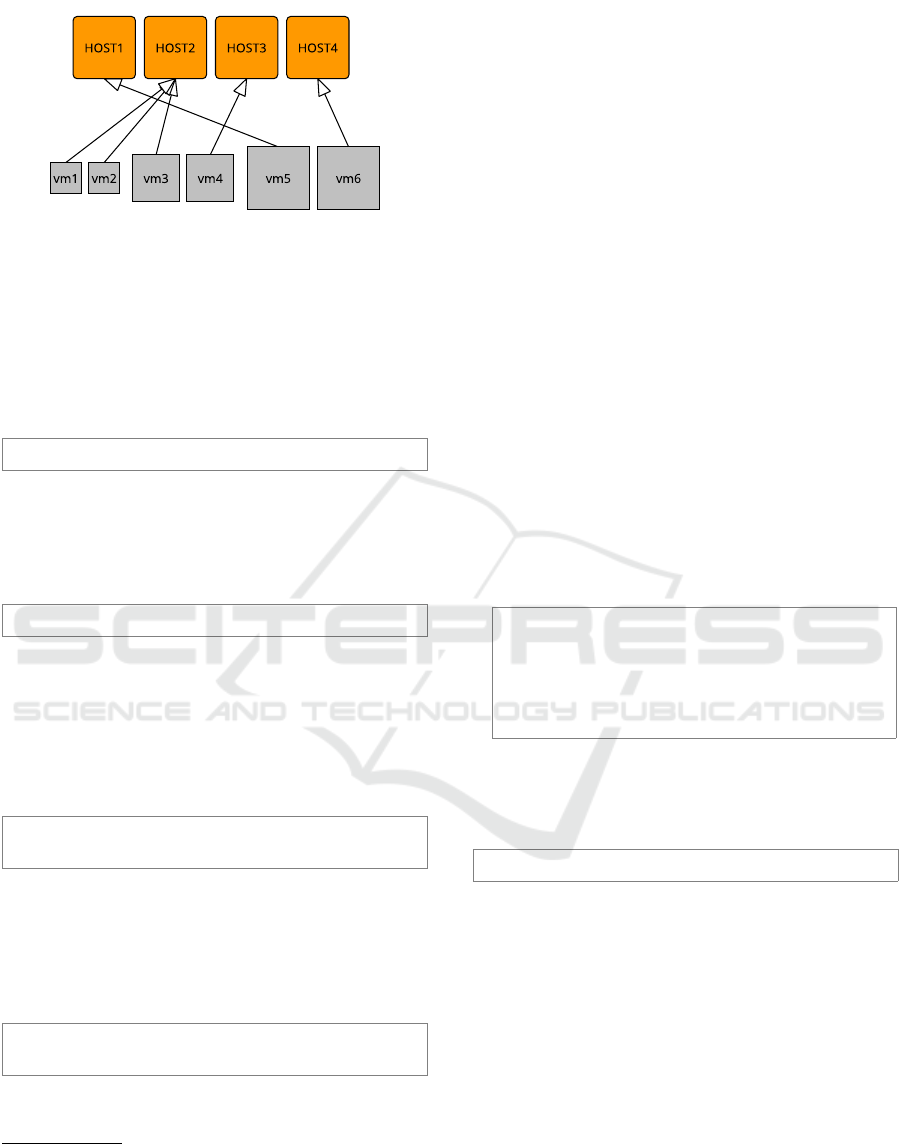
Figure 1: Placement solution for the motivating scenario.
source Prolog
2
prototype declPacker.
Knowledge Representation. We illustrate a set of
simple fact declarations used to model and solve in-
stances of the considered problem. First, the blueprint
of the physical hosts onto which VMs are to be placed
is specified through a single fact of the form
hostBluePrint((CPUCap, MemCap, NetCap)).
where CPUCap, MemCap and NetCap denote the CPU,
RAM, and network throughput available at each phys-
ical server in terms of million instructions per second
(MIPS), Megabytes, and Megabit/s, respectively.
Then, we denote each VM to be placed as
vm(Id, (CPUReq, MemReq, NetReq)).
where Id is a unique VM identifier, and CPUReq,
MemReq, and NetReq are the CPU, RAM, and network
throughput requirements for the VM at hand. We as-
sume VM requirements rely on the same unit of mea-
surement used to specify host capabilities.
Affinity and anti-affinity constraints over sets of
VMs are specified as facts of the form
affinity(VMList).
antiaffinity(VMList).
where VMList is the list of identifiers of the VMs in-
volved in the specified affinity or anti-affinity con-
straint, i.e. that are to be placed onto the same or
different hosts, respectively.
Similarly, cross-affinity and cross-anti-affinity
constraints are denoted as facts like
xAffinity(VMList1, VMList2).
xAntiaffinity(VMList1, VMList2).
where VMList1 and VMList2 are the lists of identifiers
involved in the cross-constraint.
2
A Prolog program is a finite set of clauses of the form:
a :- b1, ... , bn. stating that a holds when b1 ∧ ··· ∧
bn holds, where n≥0 and a, b1, ..., bn are atomic literals.
Clauses with an empty condition are also called facts. Pro-
log variables begin with upper-case letters, lists are denoted
by square brackets, and negation by \+.
Overview. Fig. 2 below lists the main predicate
declPacker/3 of our prototype which exploits the
knowledge representation discussed above. Given a
placement Strategy among the available ones (i.e.,
optimal and heuristic), declPacker/3 determines
an eligible Placement for the VMs declared in the
knowledge base onto NumberOfHosts hosts with ca-
pacity as declared in hostBlueprint/1. Particularly,
declPacker/3: (1) it collects all VMs to be placed
into a list through predicate toPlace/1 (lines 3, 5),
which simply finds all vm/2 facts declared in the
knowledge base; (2) it splits the cross-constraints
and ignore invalid affinities constraints so to com-
ply with the hostBlueprint/1 through predicates
splitXconstraints and cleanupInvalidAffinities
(line 2); and (3) it determines an eligible
Placement for those VMs by applying the speci-
fied search Strategy and computing the associated
NumberOfHosts with predicate declPacker/4 (line 4).
Steps (2) and (3) constitute the preprocessing and the
placement step of our solution. As a result of the
preprocessing step, the declarative placement strategy
of declPacker (described in the following) can work
by only exploiting hostBlueprint/1, vm/2, and simple
affinity/2 and antiAffinity/2 constraints.
1 declPacker(Strategy, Placement, NumberOfHosts) :-
2 toPlace(VMs),
3 splitXconstraints(), cleanupInvalidAffinities(),
4 declPacker(Strategy, VMs, Placement, NumberOfHosts).
5 toPlace([VM|List]) :- findall(V, vm(V,_), [VM|List]).
Figure 2: Bird’s-eye view of our prototype.
Placement Step. A VM placement is represented as
a list of lists like
[ [VM11, VM21, ..., VMP1], ... , [VM1K, VM2K, ..., VMRK] ]
where the J
th
list [VM1J, VM2J, ..., VMSJ] store the
identifiers of the S VMs placed onto the host J. For in-
stance, the above placement depicts K hosts and places
P VMs onto host 1, Q VMs onto host 2, and so on, up
to R VMs onto host K.
The placement step (3) is described in Fig. 3.
Predicate place/3 (lines 7–10) inputs from
declPacker/4 a non-empty [VM|List] of VMs to
be placed and a previously built eligible placement
OldPlacement (initially empty, line 7). At each
recursive step, place/3 places a new VM by relying on
predicate placeVM/4 (line 8) to extend OldPlacement
into a new eligible TmpPlacement, which includes an
eligible placement for VM. It then recurs (line 9), and
stops at an empty list of VMs to be placed (line 10).
Predicate placeVM/4 (line 11–20) recursively
A Logic Programming Approach to VM Placement
321

scans a previous eligible placement [H|Hs] (i.e., a
list of hosts) onto which the current VM could be
placed. It relies on predicates fits/2, affinityOK/3
and antiAffinityOK/2 to determine whether VM can be
placed on a considered host H. Particularly, placeVM/4
distinguishes the following four cases:
(1) VM is placed onto host H meeting all its CPU,
RAM and network requirements, and its affinity
and anti-affinity constraints, then VM is added to the
host H (line 12), which in turn is appended to the
NewPlacement, between already scanned hosts Pre and
hosts Hs not yet considered (line 13). Recursion ends
as we have an eligible placement for VM.
(2) VM is placed onto host H meeting all its CPU,
RAM, and network requirements and anti-affinity
constraints, but ignoring its (soft) affinity constraints
(line 15), then VM is added to the host H as in the pre-
vious case (line 16). Recursion ends as we have an
eligible placement for VM.
(3) VM is not placed onto host H and recursion goes on
to the next candidate host for supporting VM, by in-
cluding H in the list Pre of visited hosts (line 18).
(4) VM is placed onto a new host as the list of candi-
date hosts is finally empty (line 19–20). This last case
reasonably assumes that a host can at least support the
largest VM and avoids checking predicate fits/2.
As mentioned above, predicates fits/2,
affinityOK/3, and antiAffinityOK/2 are used to
check the eligibility of the new placement. We now
briefly comment on their functioning.
Predicate fits/2 (lines 21–26) checks that VM
can be placed onto host H by meeting its CPU,
RAM, and network throughput requirements, also
considering other VMs previously allocated at H. It
does so by first retrieving the requirements (VMCPU,
VMMEM, VMNET) of VM and the corresponding capa-
bilities (HCPU, HMEM, HNET) of the host blueprint
(line 22). Through predicate allocatedResources/2,
it retrieves the amount of resources (AllocatedCPU,
AllocatedMEM, AllocatedNET) allocated to VMs al-
ready placed onto H (line 23). Last, it checks that
adding the requirements of VM to the previous alloca-
tion does not exceed the capacity of H for what con-
cerns CPU, RAM, and throughput (lines 24–26).
Predicate affinityOk/3 retrieves all affinity con-
straints involving VM and recursively checks that there
exists no VM V 6= VM within an affinity constraint with
VM that is placed onto a host H2, such that H2 6= H. Pred-
icate antiAffinityOk/2 analogously retrieves all anti-
affinity constraints involving VM to check that no other
VM V in anti-affinity with VM is placed onto H.
Example. By repeatedly querying predicate
place([vm1,vm2,vm3,vm4,vm5,vm6], [], P).
over the knowledge base representing the motivating
scenario of Sect. 2 returns three distinct eligible place-
ments of up to five hosts. Namely:
P = [[vm5], [vm3, vm2, vm1], [vm4], [vm6]];
P = [[vm5], [vm4, vm2, vm1], [vm3], [vm6]];
P = [[vm5], [vm3], [vm2, vm1], [vm4], [vm6]].
Note that the first placement corresponds to the
one sketched in Fig. 1, the second one is identical to
the first up to swapping vm3 and vm4, the last one ex-
ploits one extra host by placing vm3 and vm4 onto dedi-
cated hosts – ignoring the soft cross-affinity constraint
with the small VMs vm1 and vm2.
Placement Strategies. The solution that we have
described applies an uninformed first-fit strategy to
determine an eligible placement, as it explores the
list of VMs in the order they appear in the knowl-
edge base. By sorting the list of VMs to be placed ac-
cording to some strategy, it is possible to apply some
heuristics to our search for an eligible placement.
declPacker provides other three functioning modes
out-of-the-box, namely:
• optimal, which retrieves all eligible placements
along with their number of hosts, and sorts them
by increasing the number of hosts to return an op-
timal placement relying on the minimum number
of hosts, alas incurring in exp-time complexity,
• heuristic, which sorts the VMList by first ranking
them according to a Rank and then sorting them
according to a specified Order, namely ascending
or descending. We currently support two ranking
methods: resourceDemand, which ranks the VMs
and sorts them according to the following function
R(V M) =
V MCPU
HCPU
+
V MMEM
HMEM
+
V MNET
HCPU
(1)
where the resource requirements are scaled via
min-max normalization; numberOfConstraints,
which ranks the VMs according to the number
of occurrences in (cross-)affinity e (cross-)anti-
affinity rules. The search space is explored ac-
cording to the SortedVMs list.
Example. Now, querying predicate declPacker in
optimal mode returns the following placement
P = [[vm5],[vm3,vm2,vm1],[vm4],[vm6]].
which corresponds to the optimal one of Fig. 1. Sim-
ilarly, querying the heuristic version sorting by de-
scending number of constraints, we obtain
CLOSER 2024 - 14th International Conference on Cloud Computing and Services Science
322

6 declPacker(firstfit, VMList, Placement, NumberOfHosts) :- place(VMList, [], Placement), length(Placement, NumberOfHosts).
7 place([VM|List], OldPlacement, NewPlacement) :-
8 placeVM(VM, OldPlacement, [], TmpPlacement),
9 place(List, TmpPlacement, NewPlacement).
10 place([], Placement, Placement).
11 placeVM(VM, [H|Hs], Pre, NewPlacement) :- % VM is placed on existing H with (anti-)affinity constraints
12 fits(VM, H), affinityOk(VM, H, Pre), antiAffinityOk(VM, H),
13 append(Pre, [[VM|H]], TmpP), append(TmpP, Hs, NewPlacement).
14 placeVM(VM, [H|Hs], Pre, NewPlacement) :- % VM is placed on existing H without affinity constraints
15 fits(VM, H), antiAffinityOk(VM, H),
16 append(Pre, [[VM|H]], TmpP), append(TmpP, Hs, NewPlacement).
17 placeVM(VM, [H|Hs], Pre, NewPlacement) :- % VM is not placed on existing H, try next one in list
18 placeVM(VM, Hs, [H|Pre], NewPlacement).
19 placeVM(VM, [], Pre, NewPlacement) :- % VM is placed on new H (Hp: host blueprint supports at least the largest VM)
20 affinityOk(VM, [VM], Pre), append(Pre, [[VM]], NewPlacement).
21 fits(VM, H) :-
22 vm(VM, (VMCPU, VMMem, VMNet)), hostBlueprint((HCPU, HMEM, HNET)),
23 allocatedResources(H, (AllocatedCPU, AllocatedMem, AllocatedNet)),
24 AllocatedCPU + VMCPU =< HCPU,
25 AllocatedMem + VMMem =< HMEM,
26 AllocatedNet + VMNet =< HNET.
Figure 3: Declarative placement step.
P = [[vm2,vm6],[vm1,vm4],[vm3],[vm5]].
which meets all hardware requirements, ignores the
soft (cross-)affinity requirements over VMs, and
meets all (cross-)/anti-affinity requirements.
4 EXPERIMENTAL
ASSESSMENT
This section presents an experimental assessment of
declPacker and a comparison of our approach to the
SOTA solution in (Cucinotta et al., 2022) in terms of
the suggested number of hosts and solve time. Their
work introduces three approaches to the optimal VM
placement problem: i) a standard MILP-based formu-
lation that expresses the problem stated in Sect. 2 as
decision variables and mathematical constraints, ii) a
simple First-Fit (FF) heuristic that allocates the VMs
one after the other in the first feasible host; and iii) a
genetic algorithm (GA) meta-heuristic.
As pointed out by the authors, a traditional MILP-
based solvers deal with low-level mathematical cal-
culations with no awareness of the high-level de-
scription of the problem under scrutiny. They pro-
vide guarantees regarding the optimality of the solu-
tion but are significantly slower than other approaches
due to the NP-hardness of the considered problem.
A solution to avoid unbearably long execution times
is to set an upper bound to the number of hosts to
the MILP formulation obtained through a (fast-in-
practice) heuristic approach, e.g. FF or GA.
In this regard, we replicated the experimental
environment
3
presented in (Cucinotta et al., 2022)
and expanded it with experimental results using de-
clPacker. The results for each of their solvers were
provided to us by the authors themselves. The place-
ment problems consider the same homogeneous phys-
ical infrastructure as described in their paper, as well
as in our motivating example in Sect. 2. Namely, each
host has the following specification: 44 CPUs, 420
GB of RAM and 15000 Mbit/s of network bandwidth.
Every approach is assessed and compared using
the open data set published in (Cucinotta et al., 2022),
which proposes a set of 152 placement problems tack-
led by Vodafone in the optimization of its capacity
planning decisions. The majority of problems require
the placement of fewer than 100 VMs. Only 5 com-
plex problems require more than 1000 VMs.
Assessing declPacker. As a preliminary step, we
selected the best placement strategy of declPacker to be
compared with the SOTA approaches. As mentioned,
the optimal strategy incurs in very high solve times,
therefore it is discarded from this preliminary com-
parison. Fig. 4 shows the outcomes of declPacker with
varying Rank and Order heuristic parameter. Notice
that there is no clear positive correlation between the
number of hosts and the problem size because the lat-
ter is expressed in terms of the number of VMs only.
The number of (anti-)affinity constraints is not con-
sidered in the sorting, but it is part of the complexity.
3
The MILP-based examples have been solved using
ILOG CPLEX version 12.9. Our declPacker is based on
SWI-Prolog version 9.0.4. FF and GA are written in Python
3 with numpy module. All the experiments have been per-
formed on a dedicated server equipped with an Intel(R)
Xeon(R) CPU E5-2640 v4 @2.40GHz and 64 GB of RAM.
A Logic Programming Approach to VM Placement
323
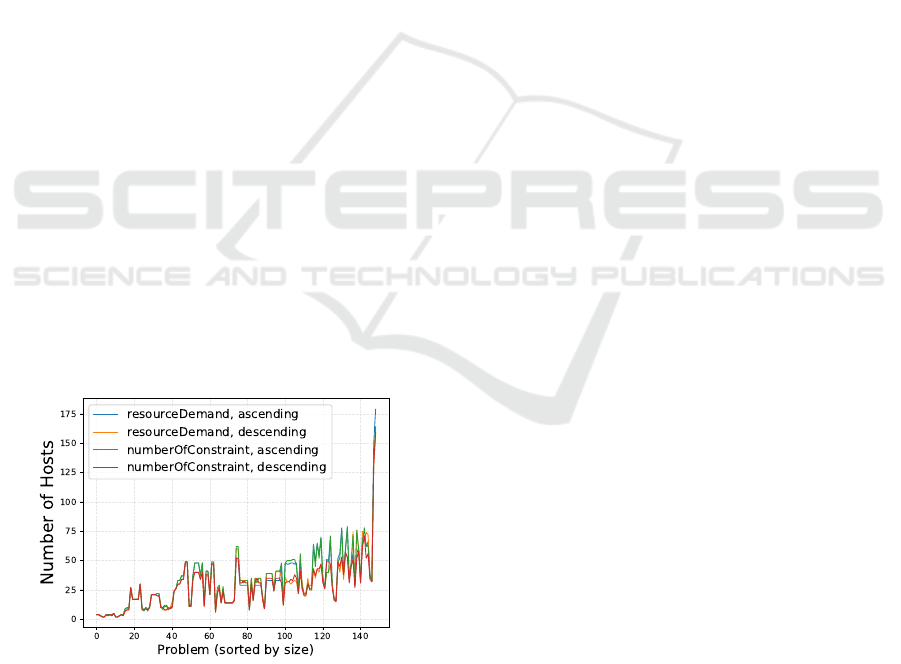
There are a total of 4 heuristics: i) “Most demand-
ing VM first”, which corresponds to ranking method
resourceDemand and order descending; ii) “Least de-
manding VM first”, rank resourceDemand and or-
der ascending; iii) “Most constrained VM first”,
rank numberOfConstraints and order descending;
and finally iv) “Least constrained VM first”, rank
numberOfConstraints and order ascending. Solve
times are not considered in this step, as they are
mostly equivalent and subject to experimental errors.
The results show that ascending order (i.e., “Least
Rank-ed VM first”) is not a good evaluation criterion
for the open data set under analysis. Secondly, the
“most constrained VM first” heuristic turned out to
be the best one. Indeed the placement problems in the
open data feature VMs with similar hardware require-
ments, making the ResourceDemand ranking method
not as good as numberOfConstraint. Each of the above
strategy, suggests on average 29, 32, 28, and 31 hosts.
Since the FF approach presented by (Cucinotta
et al., 2022) belongs to the same family of heuris-
tics, it is compared to declPacker in this preliminary
step. The solve time is equivalent in every placement
scenario, but FF suggests 3 additional hosts on aver-
age and 52 maximum, compared to our best strategy.
This is because declPacker allows for more flexibility
in terms of ranking and order, whereas FF “blindly”
places the VMs without considering the characteris-
tics of the placement problems. Although the dif-
ferences may seem negligible for all heuristic ap-
proaches, additional hosts translate to much longer
solve times when aiming for optimality. Given the
outcomes of this section, the rest of the experimental
evaluation will only consider heuristic declPacker with
rank numberOfConstraints and order descending.
Figure 4: Comparison of declPacker strategies.
declPacker vs a Genetic Algorithm. This section
presents a comparison between the best strategy of-
fered by declPacker (for the use case under analysis)
and the GA approach described in (Cucinotta et al.,
2022). The latter is run with a population of 50
candidates and a max of 25 iterations. Such val-
ues have been determined by the authors themselves
as a good exploration/exploitation/solving-time trade-
off for the experimental assessment.
Fig. 5a depicts the suggested number of hosts and
the corresponding solve time for every placement sce-
nario, outlining the 1-to-1 comparison between the
two methodologies. Arrows represent the advantage,
or disadvantage (depending on the arrow orientation),
of declPacker over GA in the two evaluation crite-
ria. For instance, declPacker demonstrates better solve
time, outperforming GA 99.95% of times, and this is
highlighted by the significant presence of downward
arrows in the plot. Our approach performs worse on a
handful of placement problems where the solve time
is under 1 second, making the time difference neg-
ligible. Oblique arrows express a trade-off between
declPacker and GA over one of the two evaluation cri-
teria. For instance, declPacker suggests the same num-
ber of hosts 60% of times, but a worse upper-bound
to the number of hosts 40% of times with respect to
the GA. The latter is depicted by the arrows point-
ing right side. Anyhow, the upper-bound difference
is no more than 2 additional hosts on average, with a
worst-case of 16 hosts. In comparison, FF suggests
5 additional hosts on average and a worst-case of 53
hosts compared to GA.
Regarding solve times, declPacker saves 22s on av-
erage, with a maximum time save of 1400s. Note that
this is biased due to the large solve time difference
for 5 problems, which are significantly more complex
than the rest (outliers on the top-right region of the
plots). Another important aspect is the variability in
solve time: GA experiences greater instabilities due
to the stochastic nature of evolutionary algorithms.
For instance, the placement problem with the longest
solve time returns a standard deviation of over 200s
in 20 reruns for GA, whereas declPacker is much more
stable with a standard deviation below 1s.
Achieving an Optimal Placement. We now com-
pare the host upper-bounding capability of our ap-
proach with SOTA approaches. The number of hosts
as from the previous section has been integrated in the
MILP formulation as a new upper-bound to the num-
ber of hosts, thus allowing for faster convergence with
a reduced search space. The approaches to be com-
pared are declPacker-upper-bounded MILP (or simply
declPacker+MILP), FF+MILP, and GA+MILP. We re-
moved from the analysis the 5 complex problems, as
they did not return the optimal solution within a time
limit of 6000s. In (Cucinotta et al., 2022), a 600s time
limit was used for analogous reasons.
In our experiments, declPacker+MILP performs
CLOSER 2024 - 14th International Conference on Cloud Computing and Services Science
324
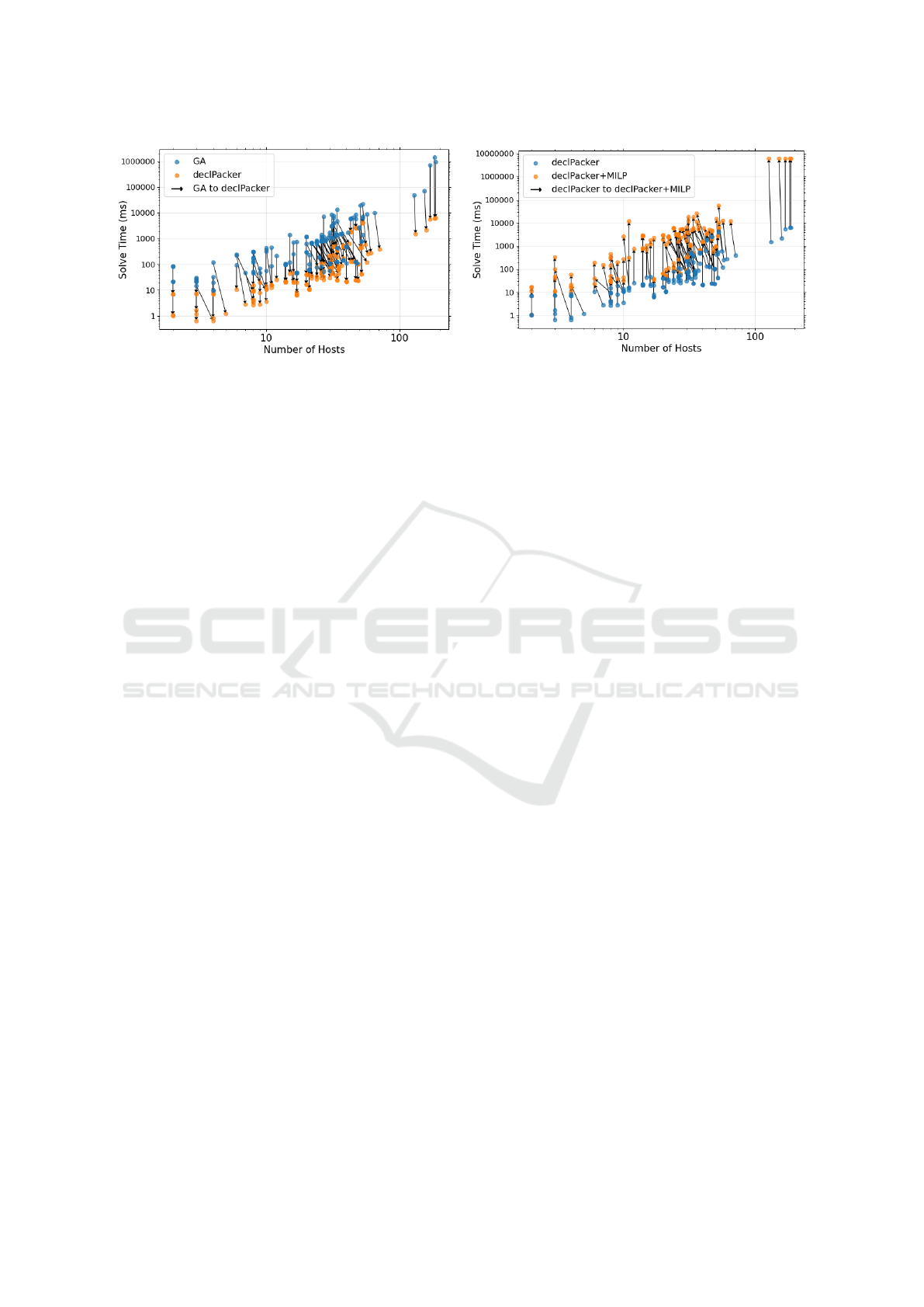
(a) declPacker vs GA.
(b) declPacker vs declPacker+MILP
Figure 5: Problem-to-problem comparison of the suggested upper-bound to the number of hosts and related solve times.
better than the SOTA approaches in combination with
MILP. GA+MILP reaches optimality faster than the
rest (2s on average), as it is the approach that sug-
gests the best upper-bound for optimality. However,
it is burdened by the execution time of the upper-
bounding phase which is 22s on average (and highly
variable). FF+MILP reaches optimality in 7s on av-
erage, and it suggests an upper-bound in less than 1s.
declPacker+MILP reaches optimality in 3s on average,
while also showing a pre-processing step as fast as FF.
If optimality is not the main goal, using declPacker
by itself may be a fair option, as shown in Fig. 5b,
showing the near-optimality of declPacker. In par-
ticular, the latter saves 11s of solve time on average
compared to running MILP (upper-bounded with de-
clPacker), while suggesting 2 additional hosts on aver-
age. This is a 6% gap from the optimal solution.
5 RELATED WORK
Prior work tackled the problem considered in this ar-
ticle (Masdari and Zangakani, 2020). Alongside the
goal of minimizing the number of hosts needed for
a deployment, other objectives can be mixed, such
as keeping the workload balanced among the ma-
chines (Hieu et al., 2014; Gupta et al., 2013). Some
authors focused on NFV (Alicherry and Lakshman,
2012; Cucinotta et al., 2022; Ma et al., 2015), consid-
ering network-awareness in the problem formulation.
Classical approaches rely on a MILP formulation
and leverage available solvers (Cucinotta et al., 2014;
Cucinotta et al., 2022; Saber et al., 2015). These
works aim at formal optimality guarantees, but suf-
fer of some practical feasibility issues due to their
possibly long execution times (Andreoli et al., 2023).
Other approaches based on ad-hoc heuristics (Oech-
sner and Ripke, 2015) are often very efficient in solv-
ing large problems, but they cannot guarantee opti-
mality. Neural Networks and ML techniques have
also been proposed (Long et al., 2020; Khoshkholghi
et al., 2019; Cucinotta et al., 2022), which are more
adaptable by having training and solving exploration
phases, but they are not very fast on retraining.
As mentioned in the introduction, recently,
Prolog-based approaches have been proposed to solve
akin application placement problems, considering dif-
ferent orthogonal aspects, e.g. data-awareness (Massa
et al., 2022), environmental sustainability (Forti and
Brogi, 2022), or intent satisfaction (Massa et al.,
2023b). Besides solving a different problem, such
proposals are usually limited to solving the decision
version of those placement problems without target
optimisations. To the best of our knowledge, only
(Massa et al., 2023a) has previously tried to combine
a declarative approach with MILP resolution.
6 CONCLUDING REMARKS
In this article we proposed declarative heuristic solu-
tion to a VM placement problem, made available as
an open-source Prolog prototype called declPacker.
Experimental results over real data from an in-
dustrial dataset show that declPacker can be used as a
stand-alone reasoner for quick decision-making, sav-
ing on average 99% of execution times and deter-
mining solutions that are only 6% far from optimal
w.r.t. MILP-based solutions. For complex scenar-
ios, its combined use with MILP improves their solve
time by 10× compared to a genetic algorithm upper-
bounding strategy – always allowing the identification
of an optimal placement.
Future work includes extending declPacker with
further constraints, mixing it with neural network so-
lutions in the spirit of neuro-symbolic approaches,
and assessing it in real testbed settings.
A Logic Programming Approach to VM Placement
325

ACKNOWLEDGEMENTS
Work partly funded by projects: Energy-aware
management of software applications in Cloud-IoT
ecosystems (RIC2021 PON A18) funded over ESF
REACT-EU resources by the Italian Ministry of Uni-
versity and Research through PON Ricerca e Inno-
vazione 2014–20; and hOlistic Sustainable Manage-
ment of distributed softWARE systems (OSMWARE),
PRA 2022 64, funded by the University of Pisa.
REFERENCES
Alicherry, M. and Lakshman, T. (2012). Network aware
resource allocation in distributed clouds. In 2012 Pro-
ceedings IEEE INFOCOM, pages 963–971.
Andreoli, R., Gustafsson, H., Abeni, L., Mini, R., and Cu-
cinotta, T. (2023). Optimal Deployment of Cloud-
native Applications with Fault-Tolerance and Time-
Critical End-to-End Constraints. In Proceedings of the
16th IEEE/ACM International Conference on Cloud
Computing, Taormina (Messina), Italy.
Attaoui, W., Sabir, E., Elbiaze, H., and Guizani, M. (2023).
VNF and CNF Placement in 5G: Recent Advances
and Future Trends. IEEE Transactions on Network
and Service Management, pages 1–1.
Cai, X., Deng, H., Deng, L., Elsawaf, A., Gao, S., Nicolas,
A. M. D., Nakajima, Y., Pieczerak, J., Triay, J., Wang,
X., Xie, B., and Zafar, H. (2023). Evolving NFV to-
wards the next decade, ETSI White Paper No. 54.
Cucinotta, T., Lugones, D., Cherubini, D., and Jul, E.
(2014). Data Centre Optimisation Enhanced by Soft-
ware Defined Networking. In IEEE 7th International
Conference on Cloud Computing, pages 136–143.
Cucinotta, T., Pannocchi, L., Galli, F., Fichera, S., Lahiri,
S., and Artale, A. (2022). Optimum VM placement
for NFV infrastructures. In IEEE International Con-
ference on Cloud Engineering, pages 205–212. IEEE.
Filho, M. C. S., Monteiro, C. C., In
´
acio, P. R. M., and
Freire, M. M. (2018). Approaches for optimizing vir-
tual machine placement and migration in cloud envi-
ronments: A survey. J. Parallel Distributed Comput.,
111:222–250.
Forti, S., Bisicchia, G., and Brogi, A. (2022). Declarative
continuous reasoning in the cloud-iot continuum. J.
Log. Comput., 32(2):206–232.
Forti, S. and Brogi, A. (2022). Green application place-
ment in the cloud-iot continuum. In Practical Aspects
of Declarative Languages - 24th International Sympo-
sium, PADL 2022, volume 13165 of Lecture Notes in
Computer Science, pages 208–217. Springer.
Gupta, A., Kale, L. V., Milojicic, D., Faraboschi, P., and
Balle, S. M. (2013). Hpc-aware vm placement in in-
frastructure clouds. In Proceedings of the IEEE In-
ternational Conference on Cloud Engineering, pages
11–20.
Hieu, N. T., Francesco, M. D., and J
¨
a
¨
aski, A. Y. (2014). A
virtual machine placement algorithm for balanced re-
source utilization in cloud data centers. In Proceed-
ings of the 2014 IEEE International Conference on
Cloud Computing, page 474–481. IEEE.
Khoshkholghi, M. A., Taheri, J., Bhamare, D., and Kassler,
A. (2019). Optimized service chain placement using
genetic algorithm. In IEEE Conference on Network
Softwarization, pages 472–479.
Long, S., Li, Z., Xing, Y., Tian, S., Li, D., and Yu, R.
(2020). A reinforcement learning-based virtual ma-
chine placement strategy in cloud data centers. In
IEEE International Conference on High Performance
Computing and Communications, pages 223–230.
Ma, W., Medina, C., and Pan, D. (2015). Traffic-Aware
Placement of NFV Middleboxes. In 2015 IEEE
Global Communications Conference, pages 1–6.
Masdari, M. and Zangakani, M. (2020). Green cloud
computing using proactive virtual machine placement:
Challenges and issues. J. Grid Comput., 18(4).
Massa, J., Forti, S., and Brogi, A. (2022). Data-aware ser-
vice placement in the cloud-iot continuum. In Service-
Oriented Computing - 16th Symposium and Summer
School, SummerSOC 2022, Revised Selected Papers,
volume 1603 of Communications in Computer and In-
formation Science, pages 139–158. Springer.
Massa, J., Forti, S., Dazzi, P., and Brogi, A. (2023a).
Declarative and linear programming approaches to
service placement, reconciled. In 16th IEEE Inter-
national Conference on Cloud Computing, CLOUD
2023, pages 1–10. IEEE.
Massa, J., Forti, S., Paganelli, F., Dazzi, P., and Brogi, A.
(2023b). Declarative provisioning of virtual network
function chains in intent-based networks. In 9th IEEE
International Conference on Network Softwarization.
Oechsner, S. and Ripke, A. (2015). Flexible support of VNF
placement functions in OpenStack. In Proc. 1st IEEE
Conference on Network Softwarization, pages 1–6.
Saber, T., Ventresque, A., Marques-Silva, J., Thorburn, J.,
and Murphy, L. (2015). Milp for the multi-objective
vm reassignment problem. In IEEE 27th Intl. Conf. on
Tools with Artificial Intelligence, pages 41–48.
Sonkoly, B., Czentye, J., Szalay, M., N
´
emeth, B., and
Toka, L. (2021). Survey on placement methods in
the edge and beyond. IEEE Commun. Surv. Tutorials,
23(4):2590–2629.
CLOSER 2024 - 14th International Conference on Cloud Computing and Services Science
326
