
Emergency Corridor Building on Multi-Lane Motorways with
Autonomous Model Cars
Jurij Kuzmic, Günter Rudolph and Fabian Ostermann
Department of Computer Science, TU Dortmund University, Otto-Hahn-Str. 14, Dortmund, Germany
Keywords: Emergency Corridor Building, Model Cars, Standing Traffic, Lane Detection, Filtered Canny Edge Detector,
Autonomous Driving, Vehicle-to-Vehicle (V2V) Communication, Autonomous Traffic.
Abstract: This paper introduces an algorithm for forming an emergency corridor on motorways with autonomous
vehicles. This algorithm can be used in slow-moving traffic and in standing traffic scenarios. In addition,
several autonomous model vehicles were assembled for the experiments in this work in order to test this
algorithm in real-world use. Furthermore, a model motorway was constructed that resembles a real three-lane
motorway. The Filtered Canny Edge Detector algorithm, also previously published by us, is used to recognise
the lanes of the motorway from camera images. Also, in this work, this lane detector is further extended and
improved for use with model vehicles in the real environment. Our experiments also show successful
emergency lane formations for four different events. Finally, possible future work in this area is presented.
1 INTRODUCTION
Unforeseeable accidents happen again and again on
roads and motorways. Sometimes serious accidents
can occur on the motorways as vehicles are travelling
at high speeds. This leads to traffic jams and road
closures. In those cases, most countries have
regulations for forming an emergency corridor (or
rescue lane) for emergency vehicles arriving at the
scene of an accident. But human drivers sometimes
forget to form such an emergency lane for police and
rescue vehicles when in a traffic jam. In extreme
cases, where the traffic comes to a hold in a chaotic
constellation due to a sudden accident, it is no longer
a straightforward task to form the rescue corridor.
When the vehicles come to a standstill, they are
usually too close to each other. In addition, there is
the problem that even if a rescue lane can be formed
after the vehicles have stopped and one emergency
vehicle drives past, the drivers of the standing
vehicles close the rescue lane again. This repeatedly
leads to the obstruction of other police or rescue
vehicles.
The problem is not new and has been discussed
for some time (Dębiński, Jukowski and
Bohatkiewicz, 2018). Currently, there is no optimal
solution. Some countries impose heavy fines for
obstructing emergency vehicles (e.g., Austrian
Federal Ministry of Mobility, 2023). To counteract
this problem, an Emergency Vehicle Warning System
has already been introduced, which uses radio
communication to warn other vehicles about an
emergency vehicle (Buchenscheit, Schaub, Kargl and
Weber, 2010). To completely eliminate this problem,
the emergency corridor must be formed automatically
by the autonomous vehicles that probably soon are
likely to be approved for regular road traffic. The
question is not if, but when autonomous vehicles will
come onto our roads.
According to our research, at the time of the
development of our algorithm, there was only the
work we published in the field of automatic formation
of an emergency corridor with autonomous vehicles
(Kuzmic and Rudolph, 2020). In addition, there were
only three patents for warning and communication
systems for the formation of the emergency lane
through vehicle-to-vehicle communication (Colella
and Herman, 2018; Marin, 1998; Siegel, 2003). This
allows for sharing information between road users,
for example about accident location or the route of an
approaching emergency vehicle.
To reduce the required budget for our study to a
minimum, we are using model vehicles. Of course,
the use of real cars would be preferable, but since we
would need at least a dozen of them to simulate a
rescue corridor situation, this is not achievable even
for highly equipped research labs. With our approach,
Kuzmic, J., Rudolph, G. and Ostermann, F.
Emergency Corridor Building on Multi-Lane Motorways with Autonomous Model Cars.
DOI: 10.5220/0012731700003705
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 9th International Conference on Internet of Things, Big Data and Security (IoTBDS 2024), pages 321-328
ISBN: 978-989-758-699-6; ISSN: 2184-4976
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
321
scaling future experiments to having tens or hundreds
of cars is in a reasonable scope. In contrast to a
computer simulation, the model cars experience
problems of real world scenarios, for example, sensor
noise, inaccuracies in motor control, or blurred
images obtained from a camera in motion.
2 ALGORITHM FOR
EMERGENCY CORRIDOR
BUILDING
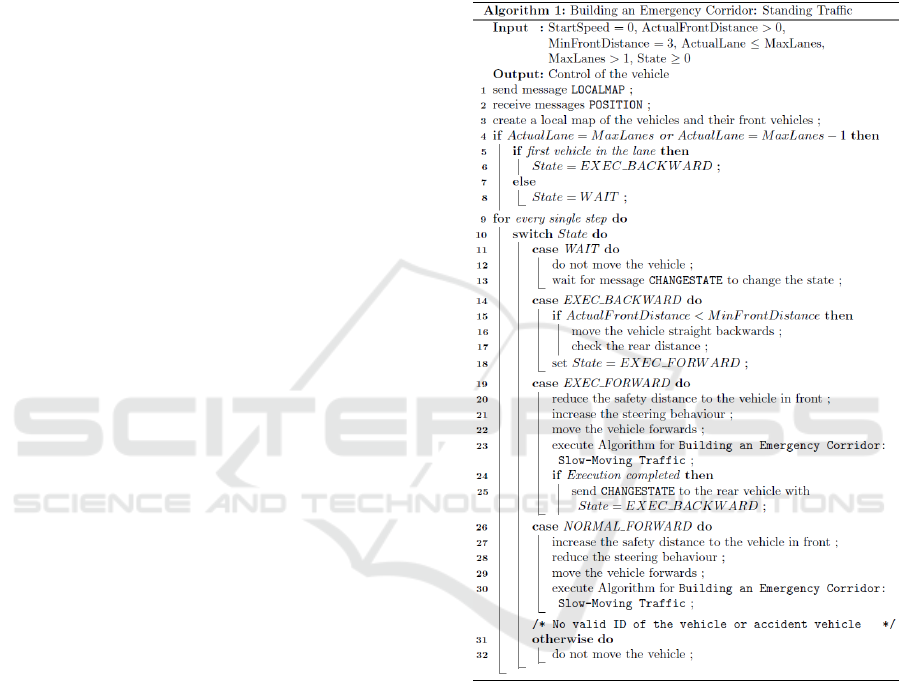
Algorithm 1 is developed for the formation of the
emergency corridor in standing traffic (when the
traffic has come to a standstill). The algorithm works
with four states. The normal state is called
NORMAL_FORWARD. This state’s logic was already
published in (Kuzmic and Rudolph, 2020) and
handles the slow-moving traffic scenario. Vehicles
usually are driving at high speeds on the motorway.
If the speed falls below a certain value (e.g. 30 km/h)
because of heavy traffic, the vehicles begin to form a
rescue corridor as they drive. This means that the
vehicles on the last lane (the leftmost lane, as we
assume right-hand traffic) move to the left lane
marking and the vehicles on the adjacent lane move
to the right lane marking. The vehicles in the other
lanes do not change their lane position. Counting of
the lanes starts in the direction of driving from right
to left, as the first lane is decided to be the lane one
drives onto first. Please note, that our algorithm also
works for left-hand traffic.
For unforeseeable reasons, it can happen that
vehicles come to a sudden standstill and human
drivers forget to form an emergency corridor. The
rescue lane for police and rescue vehicles is then
missing. With our algorithm, the drivers of these
vehicles can attempt to safely form an emergency
corridor out of such a chaotic situation at the push of
a button, or in the case of fully automated vehicles,
the cars decide to do this themselves.
Algorithm 1, requires the generation of a local
map for each individual vehicle. This means that all
vehicles share information about their positions,
including their current lane number. By sending the
information of their own identification number (in
practice, this can be the licence plate number), their
own lane position and the identification number of the
vehicle in front, it is possible to calculate the order of
the vehicles on all the lanes and to create a local map.
Then, the vehicles can decide which vehicle has to
start with forming the emergency corridor. Three
further states are used to form the corridor from
standing traffic. They allow to form the rescue lane
systematically (row by row). The vehicles closest to
the vehicles involved in the accident will start. As
soon as a vehicle has completed its task, it notifies the
vehicle behind it on the same lane. The corresponding
states WAIT, EXEC_BACKWARD, and
EXEC_FORWARD will be explained in more detail
in Section 4.
Algorithm 1: Formation of an emergency corridor in a
standing traffic.
3 AUTONOMOUS MODEL CARS
The SunFounder PiCar-S Smart Car kit for the
Raspberry Pi (SunFounder, 2022) was used to
assemble the model vehicles from the model making
area. This already contains several motors, wheels,
control plates and sensors for the construction (Fig. 1,
left). The cost of each individual kit was around 90
Euros at the time of development (the Raspberry Pi
not included). Our own measurements show that the
model vehicles reach speeds of 0.61 m/s (2.22 km/h).
IoTBDS 2024 - 9th International Conference on Internet of Things, Big Data and Security
322

We have adapted and expanded the SunFounder
PiCar-S Smart Car kit for our use case. Figure 1
shows a comparison between the original model
vehicle and our modified version.
Figure 1: SunFounder PiCar-S Smart Car kit for Raspberry
Pi. Left: Original. Right: Modified.
3.1 Construction of the Model Cars
The body of the model vehicles consists of several
die-cut acrylic panels, which are fixed in place with a
few screws. This results in slight inaccuracies in the
steering of the model vehicles. A stepper motor is
responsible for steering the model vehicles. But, the
steering can only be carried out in steps of 2° instead
of 1°: If the stepper motor is moved in 1° steps, the
front wheels do not move. This is due to inaccuracies
in the motor control design.
The next step was to add a Raspberry Pi 3 B
(Kofler, Kühnast and Scherbeck, 2021) and a
Raspberry Pi V2 camera module (RaspberryPi, 2016)
to the kit. The camera module allows to optically
detect the lane markings. The camera was installed in
a suitable camera housing. This housing was attached
with two spacers and fixed at a certain height from the
motorway at a certain angle to the motorway. The
ultrasonic sensor for distance measurement was
installed lower so as not to restrict the camera's view.
Figure 2: Extensions of the SunFounder PiCar-S Smart Car
kit for Raspberry Pi. Left: QR-Code bumper. Right:
Distance measurement with ultrasonic sensor.
A black cardboard bumper was attached to the back
of each model vehicle so that the ultrasonic sensors
find a straight surface for measuring the distance to
the model vehicle in front (Fig. 2). The affixed QR
code provides the information of the vehicle's
identification number (ID).
3.2 Construction of the Model
Motorway
A miniature model motorway was set up to carry out
the experiments. This allowed to test the previously
developed algorithm in different situations. In
addition, this test track could be used to test the
improved lane detection with the model vehicles and
to adapt it for this purpose (details follow in Section
3.3). The test motorway was also adapted to the size
of the model vehicles used. The test track resembles
a three-lane motorway (Fig. 3, left). To carry out the
planned experiments also on a two-lane motorway,
one of the lanes can be “closed”. Eight metres of
impact sound insulation for laminate was used for the
ground of the track. This material resembles the
colouring of a real road surface. White insulating tape
was used to apply the lane markings. Figure 3 (right)
shows the test model motorway including the nine
modified model vehicles that were available for our
experiments.
Figure 3: Construction of the three-lane model motorway.
Left: Motorway without model cars. Right: Motorway with
model cars.
3.3 Lane Detection
For lane detection with the model vehicles, the
previously published Filtered Canny Edge Detector
algorithm (Kuzmic and Rudolph, 2021) was used. It
is further extended and optimized for the model
vehicles in the present paper. All that is written in
bold font is a novel addition, that substantially
improves lane detection on real camera images.
0. As a preliminary work, the camera should be
aligned and calibrated. Only the vital areas
should be visible in the image (only the
road). E.g., the bonnet of the car, low-
Emergency Corridor Building on Multi-Lane Motorways with Autonomous Model Cars
323
hanging power lines, etc., should not be
visible.
1. Create a greyscale image from the coloured
input image.
2. Create a Canny edge image from the
grayscale image (Canny, 1986).
3. Apply probabilistic Hough transform
(Stephens, 1990) to the edge image
(2D coordinates for P and Q).
4. Calculate the gradient m for each straight
line.
5. Calculate the angle with atan(m) from the
gradient m.
6. Ignore all lines with an angle θ below α=25°
and above β = 80° (α < θ < β).
7. Calculate the points of intersection with the
X-axis IX for the remaining lines.
8. Sort left and right lines from the centre of
the image B into separate data fields.
9. Ignore left lines with a negative gradient
m<0 and right lines with a positive
gradient m>0.
10. Save intersection points SX, angle θ,
gradient m and P and Q coordinates of
the lines for left and right lines
respectively.
11. Calculate intersection points of left and
right lines. Accept them in a predefined
area between line intersection point 1 and
line intersection point 2.
12. Origin of these lines must be in the lower
two-thirds of the image.
13. From the centre of the image B, find the
smallest distance D = |IX-B| left and right.
14. Search in a predefined radius R for further
intersection points IX left and right.
15. Lines found in the predefined radius R
must contain a similar angle to the X-axis.
Angle threshold W with |θ
1
- θ
2
| < W.
16. Calculate an average function (straight line)
left and right from the found lines.
17. Calculate the centre of the track from these
two functions left and right.
The runtime measurements were carried out on nine
different autonomous model vehicles. By
implementing and executing the Filtered Canny Edge
Detector algorithm with multithreading on the
Raspberry Pi 3 B, we achieved slightly below 30
frames per second (FPS) as shown in Table 1. Also,
Table 1 shows that the model vehicle with ID 9
achieves only 24.5 FPS. This is due to an individual
hardware defect of this particular model car.
Table 1: Runtime of lane detection on the Raspberry Pi 3 B.
Model Car [ID] Lane [No] Runtime [FPS]
1
3 29.69
2
2 29.33
3
1 29.24
4
3 29.46
5
2 28.88
6
1 28.00
7
3 29.44
8
2 29.14
9
1 24.50
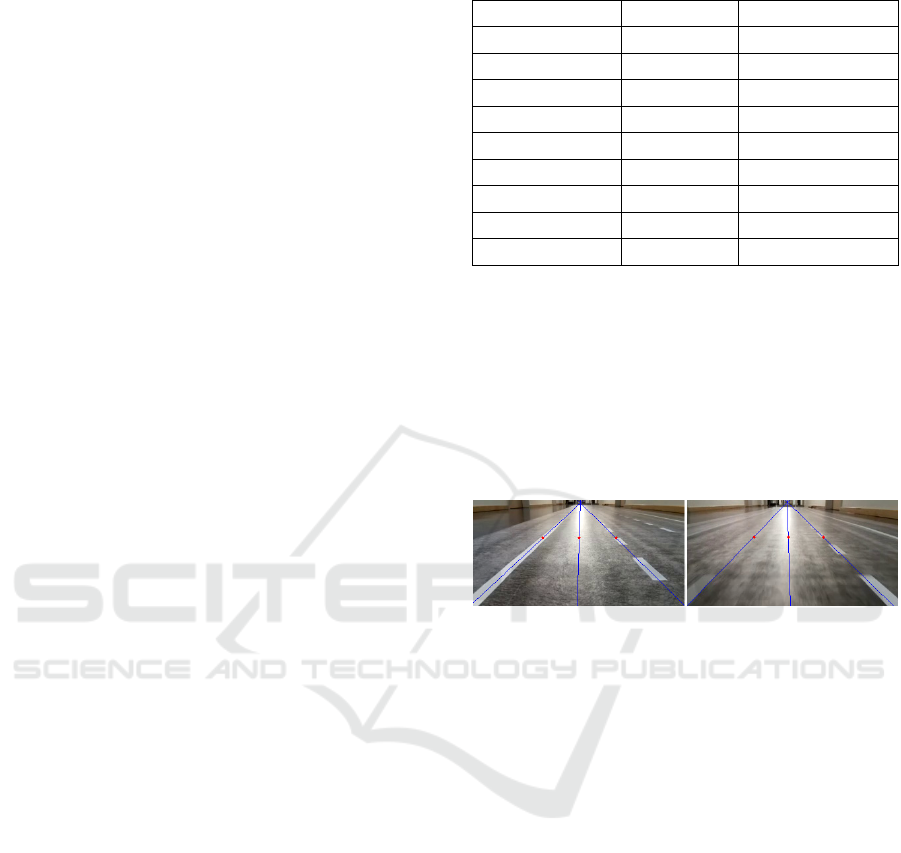
Figure 4 shows the improved Filtered Canny Edge
Detector in use on real-world camera images. As the
lighting conditions in the real environment can
change, automatic adjustment of the threshold values
for the Canny Edge Detector is required. For this
reason, the two threshold values for the filtered Canny
algorithm are dynamically adapted. The median value
of the greyscale image is used for this normalisation
(Rosebrock, 2015).
Figure 4: Filtered Canny Edge Detector as used by the
model cars on the model motorway. Left: Perfect lighting
conditions. Right: Blurred vision because of car movement.
3.4 Distance Detection and Steering
Behaviour
For the model vehicle, the distance measurement to
the model vehicle in front is realised by an ultrasonic
sensor. The horizontal detection range of this
ultrasonic sensor is about 15°. This detection range is
sufficient for forming the emergency corridor, as the
vehicles autonomously keep a sufficient safety
distance and the rescue lane can therefore be formed
without extreme steering. Most importance has the
precision of the distance sensor. The ultrasonic sensor
in use sometimes detects false input pulses from the
surroundings, which lead to incorrect distance
measurement. This was also reported by ELEC
Freaks (2022).
During the development of the steering behaviour
of the vehicles, various tests revealed that the actual
pixel difference in the lane detection can be used to
control the steering. The pixel difference from the
centre of the lane to the centre of the model vehicle
can be used directly as the steering step in degrees.
IoTBDS 2024 - 9th International Conference on Internet of Things, Big Data and Security
324

Only a maximum steering threshold needs to be set.
We chose a maximum value of 10°.
3.5 Communication Between
Self-Driving Model Cars
Communication between the model vehicles is
established via wireless LAN (Wi-Fi). At this point,
it is the easiest way to realise communication, as the
model vehicles are already connected to Wi-Fi for
remote development. This simplifies the execution of
the various scripts on the Raspberry Pi and also makes
troubleshooting easier thanks to the Secure Shell
(SSH) network protocol. Also, the output of the
executed scripts can be monitored. Also, SSH access
to the model vehicle via Wi-Fi makes it easy to
calibrate the stepper motor and to configure the model
vehicles.
Communication between the model vehicles
allows them to react autonomously to various
messages. For example, as soon as an accident or
collision involving the model vehicle is recognised,
the vehicle performs emergency braking and notifies
the vehicles in the vicinity. The message contains a
name as well as information about the accident
vehicle's identification number. The various
messages of our specification are listed in Table 2.
Table 2: Overview of all possible messages including the
description for communication between autonomous model
cars.
Name Descri
p
tion
COLLISION Collision/rotation of the vehicle
FORWARD Forwardin
g
the incomin
g
messa
g
e
RESCUE
Notifying emergency vehicles of
an accident
LANE Own lane of the vehicle
TOTALLANES Total lanes of the motorwa
y
LOCALMAP Building the local map
POSITION
Own lane of the vehicle and ID of
the vehicle in front
STOP Stop own vehicle
CHANGESTATE Change of state
As already explained in Section 2, communication
between the model vehicles can be used to create the
required local map of the vehicles on the model
motorway to form an emergency corridor in the event
of a standing traffic. The LOCALMAP message is sent
to request the information from each individual
vehicle. The vehicles that receive this message
respond with the POSITION message. This message
contains information about the vehicle's own lane and
the identification number of the model vehicle in
front in the same lane. Each individual model vehicle
can then independently create its own local map with
all vehicles that are present in the real environment.
The CHANGESTATE message is sent to change the
state for executing the formation of the emergency
corridor (cf. Algorithm 1).
4 EXPERIMENTS
As before, we used our virtual simulator (Kuzmic and
Rudolph, 2020) to perform preliminary testing of our
new Algorithm 1. To proof that the results transfer to
the real world, we now attempt to carry out
experiments with our real model vehicles. This allows
the behaviour of the algorithm for forming the
emergency corridor in slow-moving and standing
traffic to be checked in reality. The different scenarios
are explained below using the illustrations. Videos
are also available online for all scenarios (Kuzmic,
2023).
4.1 Building an Emergency Corridor:
Slow-Moving Traffic
This experiment shows the algorithm for forming the
emergency corridor in slow-moving traffic with the
autonomous model vehicles, which are in the state
NORMAL_FOWARD. The emergency lane is formed
between the leftmost and the adjacent lane. When
forming the rescue lane, the position of the left or
right front wheel of the model vehicle must be
compared with the previously recognised lane
markings. At this point, the previously introduced
lane detection (Filtered Canny Edge Detector) from
Section 3.3 is used. This means that each model
vehicle knows in which direction (left or right) it has
to move in order to form a rescue corridor depend on
its own lane. As Figure 5, left, shows, the rescue lane
can be successfully formed by the autonomous model
vehicles.
Figure 5: Building an emergency corridor at slow-moving
traffic on a two-lane motorway. Left: Emergency corridor
about to open. Right: Emergency corridor opened and will
close if cars can speed up again.
In a slow-moving traffic, the model vehicles
automatically drive to the left or right to open a
Emergency Corridor Building on Multi-Lane Motorways with Autonomous Model Cars
325

corridor for emergency vehicles. If the speed of the
model vehicles increases, the opened emergency
corridor is automatically closed again (Fig. 5, right).
This ensures that the vehicles have formed a rescue
lane for the police and emergency vehicles at all times
after braking.
4.2 Building an Emergency Corridor:
Obstacles in Front
In this section, the formation of the emergency
corridor in the event of various obstacles on a
motorway is tested. If the speed decreases, it is
theoretically irrelevant for the model vehicles for
what reason it is. The position of an obstructive object
is more important than its type (e.g. crashed car,
crossing animal, etc.). As soon as an object is detected
in the vehicle's own lane and is approaching, the
speed of the model vehicle is reduced. Then, the
emergency corridor is opened automatically when the
speed falls below a certain value (e.g. 30 km/h). As
Figure 6 shows, the emergency corridor can be
successfully formed with the model vehicles on a
two-lane model motorway in the event of an accident.
Figure 6: Successfully established emergency corridor in
the event of an accident on a two-lane motorway. Left: Car
accident. Right: Animals crossing.
The rescue corridor can also be successfully formed
on a three-lane motorway in the event of an accident
with a closed lane. This is shown in Figure 7.
Figure 7: Successfully established emergency corridor in
the event of an accident on a three-lane motorway with a
closed lane. Left: Front-view. Right: Rear-view.
Additionally, the formation of the emergency corridor
with autonomous model vehicles can also be carried
out on a three-lane motorway. This is shown in Figure
8. In the previously published simulator, some
experiments were also successfully carried out on a
four-lane motorway with different lane widths
(Kuzmic and Rudolph, 2020).
Figure 8: Successfully established emergency corridor in
the event of an accident on a three-lane motorway. Left:
Front-view. Right: Rear-view.
4.3 Building an Emergency Corridor:
Front Tire Bursting
To test whether the emergency corridor can be
formed at any random time with the autonomous
model vehicles, the front tyre of the model vehicle
was simulated to burst. In this experiment, the impact
sensor was used to detect an unintended and sudden
movement of the model vehicle that we caused by
hand. The occurrence of this movement was
unpredictable for the model. Thus, the crashed
vehicle recognised its accident and performed an
emergency braking manoeuvre. As shown in Figure
9, left, this model vehicle is in the third lane (most
right lane in the picture). Once the accident and the
unforeseeable turn has been recognised, all vehicles
in the vicinity are notified in order to avoid collisions.
These following model vehicles can then
immediately react to the incoming message and
independently decide how to form the emergency
corridor.
Figure 9: Model realisation of a front tire bursting while
driving. Left: Front-view. Right: Rear-view.
The first model vehicle in the second lane also had to
perform an emergency braking, as this model vehicle
is close to the vehicle involved having the accident.
However, this first model vehicle in the second lane
was still able to form the emergency corridor already
as it steered safely during the emergency braking. All
IoTBDS 2024 - 9th International Conference on Internet of Things, Big Data and Security
326

other vehicles maintained the safety distance and
were therefore further away. This allowed these
model vehicles to brake normally and at the same
time open the rescue corridor for the police and rescue
vehicles (Fig. 9, right). The fact that such a complex
manoeuvre (simultaneous braking and targeted
steering) can be carried out is a decisive advantage of
autonomous vehicles, as it could never be performed
reliably by a human in such fractions of a second.
4.4 Building an Emergency Corridor:
Standing Traffic
This section presents the experimental tests of
Algorithm 1 for the formation of the emergency
corridor in a standing traffic in our real model
environment. For this, it is also necessary for each
individual model vehicle to generate a local map
through communication and optical evaluation of the
model vehicle in front. By exchanging its own
identification number, its own lane position and the
identification number of the vehicle in front, the
sequence of the model vehicles in the various lanes
can be created from the local map.
Figure 10: Building an emergency corridor in the event of
an accident in a standing traffic on a two-lane motorway.
Left: First row execution. Right: Third row execution.
This means that each model vehicle can make the
decision for itself which vehicles should start to form
the rescue corridor. The model vehicles
systematically form the rescue lane for the police and
rescue vehicles row by row. At this point, the
formation of the rescue lane in standing traffic takes
place via four states (see Algorithm 1). The model
vehicles closest to the accident vehicles start forming
the rescue lane (Fig. 10, left). If the distance is too
short for the emergency lane to be formed, the model
vehicles automatically drive backwards
(EXEC_BACKWARD). As our autonomous model
vehicles do not have rear sensors for distance
measurement, the vehicles behind notify the vehicles
in front of them of the distance. As soon as the model
vehicle in front has completed the formation of the
emergency corridor, it notifies the model vehicle
behind it in the same lane. From the third row
onwards, the distance for a rescue lane is sufficient so
that these model vehicles no longer have to drive
backwards (EXEC_FORWARD). This can be seen in
Figure 10, right. From the sixth row onwards, the
model vehicles are in the NORMAL_FORWARD state
and can build the emergency corridor in a slow-
moving traffic. As Figure 11 shows, the rescue lane
can be successfully formed on a two-lane highway in
a standing traffic.
Figure 11: Successfully established emergency corridor in
the event of an accident in a standing traffic on a two-lane
motorway. Left: Front-view. Right: Rear-view.
Also, the emergency corridor can be successfully
formed automatically on a three-lane highway. This
is shown in Figure 12.
Figure 12: Successfully established emergency corridor in
the event of an accident in a standing traffic on a three-lane
motorway. Left: Front-view. Right: Rear-view.
5 CONCLUSIONS
The algorithm developed for emergency lane
formation was successfully tested in reality using the
adapted lane detection (Filtered Canny Edge
Detector). The correct functionality of the algorithm
was demonstrated experimentally for slow-moving
and standing traffic in a real-world situation using
model cars. The model cars acted completely
autonomously. The reason and the external
circumstances for the formation of the emergency
Emergency Corridor Building on Multi-Lane Motorways with Autonomous Model Cars
327

corridor are irrelevant. This could be, for example,
slow-moving traffic, animal crossings, a burst front
tyre, a car collision or any other unforeseeable event.
Conducting the experiments with model vehicles
showed more difficulties than our previously
published simulation (Kuzmic and Rudolph, 2020).
In a real environment, the quality and measurement
tolerance of the sensors and the design of the model
vehicles for the test play an important role. The
previously published and in this paper extended and
improved lane detection (Filtered Canny Edge
Detector) could additionally be further optimised for
hardware with limited resources (Raspberry Pi 3 B).
However, about 30 FPS, which we achieved by CPU
parallelization, already enabled us to run our lane
detection in real-time.
In addition, selected examples of the experiments
in this work were published online (Kuzmic, 2023)
with references to our scientific publications.
For future work, the car body of the model
vehicles could be improved. It is also recommended
to use a better ultrasonic sensor for measuring the
distance to the vehicle in front. Finally, it would be
most interesting to test how the algorithm presented
in this paper performs in the real world with real
autonomous vehicles in real size on a real motorway.
REFERENCES
Austrian Federal Ministry of Mobility, 2023.
Rettungsgasse. Oesterreich.gv.at. [online]. Available
at: https://www.oesterreich.gv.at/themen/mobilitaet/kf
z/10/Seite.063130/Seite.065000.html. Accessed:
20.10.2023.
Buchenscheit, A., Schaub, F., Kargl, F., Weber, M., 2018.
A VANET-based emergency vehicle warning system,
2009 IEEE Vehicular Networking Conference (VNC),
pp. 1-8, ISBN 978-1-4244-5685-7.
Canny, J., 1986. A Computational Approach to Edge
Detection. In Proceedings of IEEE Transactions on
Pattern Analysis and Machine Intelligence, Bd. PAMI-
8. 6, pp. 679-698, DOI: 10.1109/TPAMI.1986.4767
851.
Colella, N., Herman, D. A., 2018. Emergency corridor
utilizing vehicle-to-vehicle communication. US-Pat.
US20170352268A1. Ford Global Technologies LLC.
ELEC Freaks, 2022. Ultrasonic Ranging Module HC -
SR04. Cdn.sparkfun.com. [online]. Available at:
https://cdn.sparkfun.com/datasheets/Sensors/Proximity
/HCSR04.pdf. Accessed: 17.02.2024.
Dębiński, M., Jukowski, M., Bohatkiewicz, J., 2018.
Emergency Corridors - Necessary Solutions in a
Modern Road Network, MATEC Web of Conferences
231 (GAMBIT 2018), pp. 1-6.
Kofler, M., Kühnast, C., Scherbeck, C., 2021. Raspberry
Pi: Das umfassende Handbuch. Galileo Press, pp. 17-
44, ISBN 978-3-8362-8353-3.
Kuzmic, J., 2023. Building an Emergency Corridor with
Autonomous Cars. YouTube.com. [online]. Available
at: https://www.youtube.com/watch?v=OEgJETouExc
&list=PLIzKtWM9Wfqen3TxLNnE-
noxu980jd_gy&index=14. Accessed: 17.02.2024.
Kuzmic, J., Rudolph, G., 2020. Unity 3D Simulator of
Autonomous Motorway Traffic Applied to Emergency
Corridor Building. In Proceedings of the 5th
International Conference on Internet of Things, Big
Data and Security (IoTBDS), pp. 197-204, ISBN 978-
989-758-426-8.
Kuzmic, J., Rudolph, G., 2021. Comparison between
Filtered Canny Edge Detector and Convolutional
Neural Network for Real Time Lane Detection in a
Unity 3D Simulator. In Proceedings of the 6th
International Conference on Internet of Things, Big
Data and Security (IoTBDS), pp. 148-155, ISBN 978-
989-758-504-3.
Marin, R. T., 1998. Emergency vehicle proximity warning
and communication system. US-Pat. US4794394A.
Stephens, R. S., 1990. A probabilistic approach to the
Hough Transform. In Proceedings of the British
Machine Vision Conference, British Machine Vision
Association, pp. 12.1-12.6, DOI:10.5244/c.4.12.
RaspberryPi, 2016. Raspberry Pi Camera Module 2.
Raspberrypi.com. [online]. Available at:
https://www.raspberrypi.com/products/camera-
module-v2/. Accessed: 15.12.2022.
Rosebrock, A., 2015. Zero-parameter, automatic Canny
edge detection with Python and OpenCV.
Pyimagesearch.com. [online]. Available at:
https://pyimagesearch.com/2015/04/06/zeroparameter-
automatic-canny-edge-detection-with-python-and-
opencv/. Accessed: 13.04.2023.
Siegel, M. A., 2003. Emergency vehicle alert system. US-
Pat. US20030043056A1.
SunFounder, 2022. Raspberry Pi Smart Car Kit (Picar-S)
for Intermediate. Sunfounder.com. [online]. Available
at: https://docs.sunfounder.com/projects/picar-s/en/sta
ble/introduction.html. Accessed: 28.11.2022.
IoTBDS 2024 - 9th International Conference on Internet of Things, Big Data and Security
328
