
Challenges of Remote Driving on Public Roads Using 5G Public
Networks
Adrien Bellanger
a
, Michael Kl
¨
oppel-Gersdorf
b
, Joerg Holfeld
c
, Lars Natkowski and
Thomas Otto
d
Fraunhofer IVI Institute for Transportation and Infrastructure Systems, Dresden, Germany
Keywords:
Teleoperation, Remote Driving, 5G Standalone Public Network, 5G Non-Standalone Public Network.
Abstract:
Teleoperation, in the form of remotely controlling a vehicle (remote driving), is an important bridging tech-
nology until fully autonomous vehicles become available. Currently, there are manifold activities in this area
driven by public transport companies, which implement solutions to offer first commercial teleoperation activ-
ities on the road. On the other hand, scientific reports of these solutions are hard to come by. In this paper, we
propose a potential implementation for remote driving in 5G based public networks. We describe our insights
from real world test drives on public roads and discuss possible challenges and suggest solutions.
1 INTRODUCTION
Teleoperating a vehicle (or remote driving) means re-
motely controlling its speed and steering. From our
point of view, remote driving has two main appli-
cation scenarios: The first one is to control a non-
automated car over a whole ride e.g. redistribution of
car sharing fleets, yard automation or allowing indi-
vidual mobility for people which are not able or will-
ing to drive (mobile work, child, alcohol consump-
tion, disabilities, etc.), (Domingo, 2021). On the other
hand, automated driving won’t be able to cover all
situations in the upcoming years. Remote driving po-
tentially allows unmanned vehicles to continue their
journey after entering a risk-minimal state. After we
demonstrated in (Kl
¨
oppel-Gersdorf. et al., 2023a) and
(Kl
¨
oppel-Gersdorf. et al., 2023b) the viability of re-
mote driving in a 5G standalone (SA) campus net-
work, this paper focuses on challenges of remote driv-
ing on public roads with 5G public networks.
The paper is organized as follows: after introduc-
ing the state of the art in remote driving, section 3
presents the hardware used by our demonstrator, and
section 4 the software architecture. In section 5, we
discuss our results and key findings. The paper con-
cludes with an outlook in the last section.
a
https://orcid.org/0009-0002-8345-427X
b
https://orcid.org/0000-0001-9382-3062
c
https://orcid.org/0000-0002-1618-4241
d
https://orcid.org/0000-0003-0099-9363
2 STATE OF THE ART OF
REMOTE DRIVING
In 2013, (Gnatzig et al., 2013) failed to show the
feasibility of remote driving in public with latencies
higher than 1 s due to the 3G networks. And also (Liu
et al., 2017) proved that innovations introduced by
Long Term Evolution (LTE) were not enough to drive
remotely on public areas. (Kakkavas et al., 2022) pro-
vided a first show case on public roads using the cur-
rent 5G technology. (Saeed et al., 2019; Kim et al.,
2022) confirmed that 5G remote driving is possible at
least if a 5G base station provides excellent coverage,
and if the remote operators are positioned at locations
with low latency network access (Zulqarnain and Lee,
2021).
Since a few years, demonstrations on sites with
great coverage were shown from car manufacturers
using tier-1 technology (Valeo, Bosch, etc.) in re-
search projects as well as from car sharing providers
(vay.io, halo.car, Elmo, etc.).
The consensus for commercialization aims at the
integration of multiple networks to reduce conges-
tion risks. According to (Ralf Globisch, 2023) us-
ing Low-Latency, Low-Loss and Scalable Through-
put (L4S) would be enough to consider a single cellu-
lar provider, if L4S would be widely deployed.
After conducting an ISO 26262 (ISO 26262-
10:2018, 2018) assessment, Vay launched at the be-
ginning of the year 2024 its service commercially and
506
Bellanger, A., Klöppel-Gersdorf, M., Holfeld, J., Natkowski, L. and Otto, T.
Challenges of Remote Driving on Public Roads Using 5G Public Networks.
DOI: 10.5220/0012738600003702
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 10th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2024), pages 506-512
ISBN: 978-989-758-703-0; ISSN: 2184-495X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

remotely drives vehicle of its car sharing fleet to cus-
tomers in certain areas of Los Angeles
1
.
Last, but not least, our own demonstrator showed
the feasibility of remote driving on a closed area using
a 5G SA campus network (Kl
¨
oppel-Gersdorf. et al.,
2023a) and (Kl
¨
oppel-Gersdorf. et al., 2023b).
3 DEMONSTRATOR
The demonstrator’s purpose is to control a car (see
3.1) using a remote driving station (see 3.2), where the
car is connected over a 5G SA public network. The
communication between both is facilitated by a server
hosted in a Virtual Machine (VM) (see 3.3), which is
accessible from both sides as described in Figure 1.
Figure 1: Main components of the remote driving demon-
strator. The communication between radio and the VM is
outside our sphere of influence and is depicted to show
the general flow of information, especially in comparison
with the remote driving demonstrator using campus net-
work (Kl
¨
oppel-Gersdorf. et al., 2023b). DFN denotes the
German Science Network, a separate backbone connecting
science institutions in Germany. This network interfaces the
public internet at certain exchange points.
3.1 Remotely Controlled Vehicle
The test vehicle is the same as in (Kl
¨
oppel-Gersdorf.
et al., 2023b), where it was used on a test track in a
5G SA campus network. It is a Volkswagen Passat
with automatic transmission modified by IAV GmbH
to be able, among others, to control the set Adaptive
Cruise Control (ACC) speed and the steering wheel
1
https://vay.io/press-release/vay-launches-commercia
l-driverless-mobility-service-with-remotely-driven-cars-i
n-las-vegas-nevada/
angle using a custom Controller Area Network (CAN)
interface.
The car computer (a Nuvo-9160GC PoE) is con-
nected to the Internet over a 5G router (Mikrotik
Chateau 5G). This computer features an Intel Core i7-
13700TE processor, 32GB of RAM and an NVIDIA
Quadro RTX A2000 graphics card.
The customer CAN (vehicle control) as well as
the vehicle data CAN (telemetry) interfaces are ac-
cessed via a USB CAN Bus interface connected to
the car computer. The transmission of those control
and telemetry information is explain in section 4.2.
The visual information is captured by four AIDA
Imaging HD-NDI-MINI cameras with a resolution of
1920x1080 pixels each, which were used in (Kl
¨
oppel-
Gersdorf. et al., 2023b) too. Three cameras are placed
below the rear mirror to capture above 240
◦
in the
front direction, whereas the fourth is placed close to
the rear window to provide a rear-view image.
We decided to use those cameras for their abil-
ity to encode videos streams on their own, such that
the old car computer (see (Kl
¨
oppel-Gersdorf. et al.,
2023b)) was not a bottleneck anymore within the
video stack.
The transmission of the video streams is detailed
in section 4.1.
3.2 Remote Driving Station
The remote driving station consists of a workstation
with three gaming monitors and a racing wheel (see
Figure 2a).
The workstation consists of an Intel i7-12700 with
12 physical cores clocked at 4.90GHz, 32GB RAM
and a NVIDIA RTX A5500 graphics card.
To facilitate remote driving, a Logitech G29 rac-
ing wheel (including pedals) is used, the wheel’s force
feedback is configured to center automatically.
3.3 Virtual Machine - Server
The VM is needed to forward video signals to the re-
mote driving station (see 4.1), as well as receiving and
distributing messages (see 4.2) in both directions be-
tween car and remote driving station.
As explained in the next section the VM runs Me-
diaMTX, a TURN/STUN server and an MQTT bro-
ker. All of them do not need a lot of resources. In our
case a VM with only one core 8 GB RAM is over-
sized, where the processor is an AMD EPYC 7542
clocked at 2.9GHz.
To reduce the whole latency, we place the VM as
close as possible to the remote driving station (ping
from remote driving station to VM < 1ms).
Challenges of Remote Driving on Public Roads Using 5G Public Networks
507
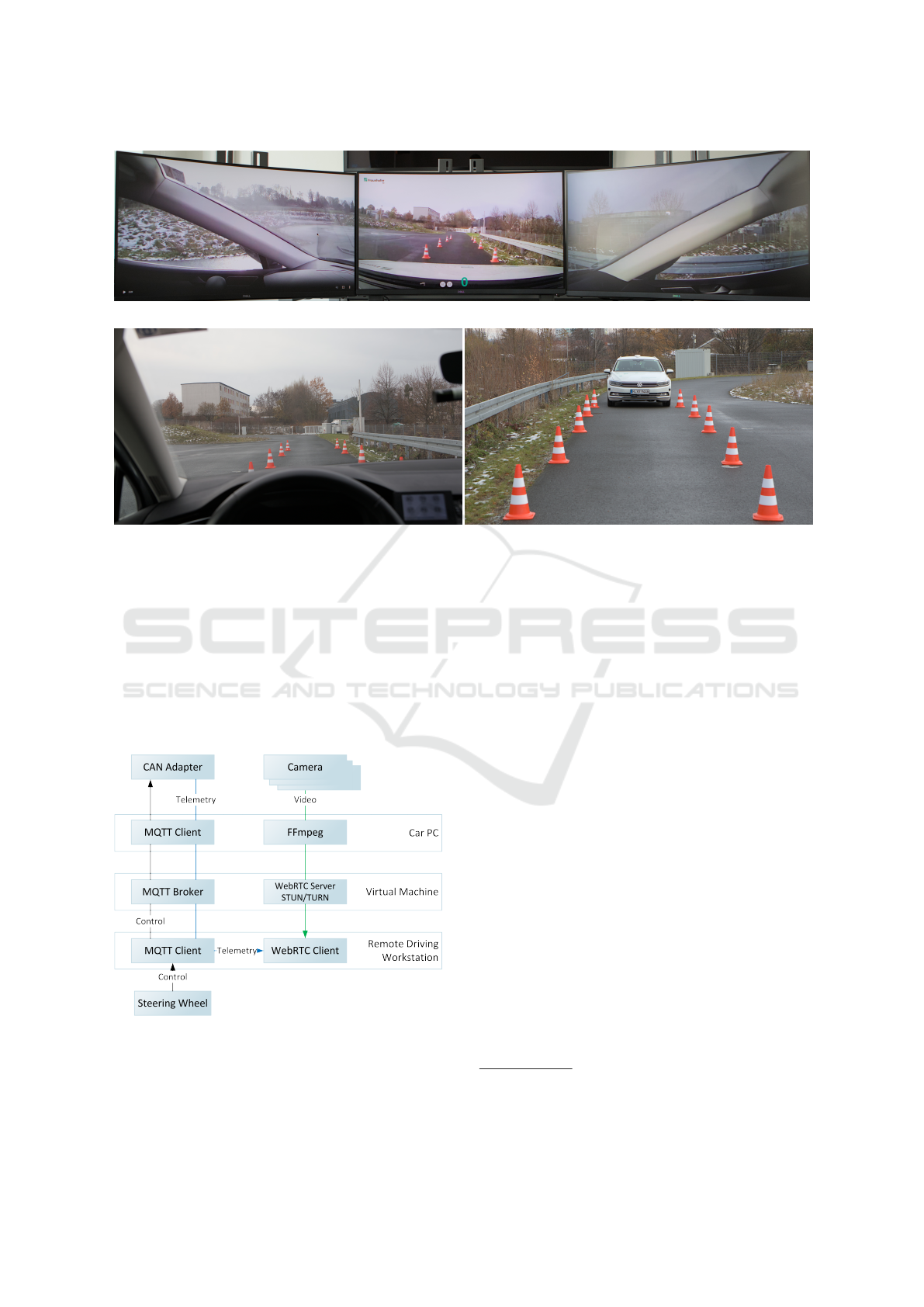
(a) Remote driver perspective.
(b) Driver perspective.
(c) Placement of the car on the track.
Figure 2: Challenges estimating car width and placement as a remote driver.
4 SOFTWARE ARCHITECTURE
In order to drive remotely, visual information has to
be transmitted from the vehicle to the remote driving
station (see 4.1) and the control command has to be
transmitted from the workstation to the car (see 4.2).
Figure 3 shows the data flow between all components.
Figure 3: Data flow. Telemetry data is printed over the video
stream (see Figure 2a), which requires that the WebRTC
client is connected to an MQTT client.
4.1 Video Transmission
According to (Neumeier et al., 2019), remote driving
with a glass-to-glass latency higher than 300 ms will
not occur in decent conditions. Video streaming un-
der such latency is usually named ultra-low latency,
notice that a few publication use this term for latency
under one second.
AIDA Imaging HD-NDI-MINI camera provides
video streams encoded using H.264 or H.265, only
Real Time Streaming Protocol (RTSP) allow accept-
able latency. Notice that RTSP streams are only ac-
cessible in local network, and the remote driving sta-
tion has no access to the car computer. To avoid
an extra latency, the stream is forwarded to the VM
as an RTSP stream over Transmission Control Proto-
col (TCP) using FFmpeg
2
.
The RTSP port is managed by MediaMTX
3
which
encapsulate the streams using WebRTC (Sredojev
et al., 2015). MediaMTX provides one web page per
camera. To allow the WebRTC to be displayed from
other subnets the VM also run a TURN/STUN server
(Coturn
4
).
To reduce the number of screens, we customized
2
https://ffmpeg.org
3
https://github.com/bluenviron/mediamtx
4
https://github.com/coturn/coturn
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
508

the web page for the center camera with an overlay
containing the current speed of the vehicle and the sta-
tus of the acceleration and steering CAN interfaces.
A web browser is sufficient to display the vi-
sual information provided by the cameras with a de-
cent latency, except when it is sandboxed (Kl
¨
oppel-
Gersdorf. et al., 2023b). Note, that not all of the tested
RTSP players were able to play those streams without
buffering (ffplay, VLC, totem...).
4.2 Control and Telemetry
The transmission of control and telemetry informa-
tion is in its architecture close to how it was im-
plemented in (Kl
¨
oppel-Gersdorf. et al., 2023a) and
(Kl
¨
oppel-Gersdorf. et al., 2023b), where the Edge
Cloud is replaced by the VM.
The remote driver station runs a Python script
which monitors the Logitech G29 driving wheels state
using PyGame 2
5
. It converts the position of both ac-
celeration and brake pedal to a relative acceleration in
the interval [−1; 1], where negative values are for de-
celeration, the steering wheel angle is also converted
to the interval [−1; 1]. Buttons on the wheel are also
used to activate remote driving as well as turn lights.
Each state has its own Message Queuing Teleme-
try Transport (MQTT) topic, the messages are pub-
lished to the MQTT broker installed on the VM
(Eclipse Mosquitto
6
).
The car computer uses a Python script to control
the vehicle and read telemetry information.
To get control messages, it subscribes to the con-
trol MQTT topics. The car is controlled by modifying
CAN messages on a custom CAN interface, whereas
telemetry information are read mainly from the vehi-
cle data CAN interface. The interaction with the CAN
bus occurs using python-can
7
and an USB CAN inter-
face.
The ACC CAN interface allows to set a target ac-
celeration in m
2
/s, thus the script transforms the input
normalized acceleration to an absolute acceleration.
A linear transformation is used to get values in the in-
terval [−3 m
2
/s; 2m
2
/s]. Consequently, when gas and
brake pedals are released, the vehicle keeps its current
speed. It would be possible to modify the transforma-
tion to simulate engine braking or one pedal driving,
but our remote drivers appreciate the ability to stay at
the current speed easily. It compensates the difficul-
ties to assess the vehicle’s speed on a video basis.
The steering CAN interface controls the steer-
ing wheel angle using the servo motors employed
5
https://github.com/pygame/pygame/releases/tag/2.0.0
6
https://mosquitto.org
7
https://github.com/hardbyte/python-can
by parking and lane assistants. As the CAN in-
terface is expecting values in degree in the interval
[−460
◦
; 460
◦
], like for acceleration a linear transfor-
mation is used.
Note that even the basic transformations from rel-
ative acceleration and steering values to absolute ac-
celeration in m
2
/s and steering wheel angle in degrees
provide an acceptable remote driving feeling. One of
the limitations of our implementation is that the accel-
eration interface will be disabled when the Anti-lock
Braking System (ABS) has to prevent the wheels to
block or Electronic Stability Program (ESP) detects
loss of steering control. The feeling was good enough
that after a few brake tests, the remote drivers were
able to drive on our test track with black ice and snow
to drive without activating the ABS and ESP includ-
ing starting and stopping.
As explained in (Kl
¨
oppel-Gersdorf. et al., 2023b)
we try to reduce the cost of a future implementation,
that’s why we limit our telemetry usage to the cur-
rent vehicle speed, and the state of acceleration and
steering CAN interfaces. The telemetry is read using
the Python script used to control the vehicle and pub-
lished on different MQTT topics.
Figure 2a shows how it is displayed on the web
page dedicated to the center camera.
5 RESULTS AND REMAINING
CHALLENGES
Tests on public roads in Dresden using the 5G public
network point unexpected and underestimated chal-
lenges to us, which we discuss in this section.
5.1 Location of the Remote Driving
Work Place
As already noted by (Saeed et al., 2019), the remote
driving work place should be close to the 5G com-
munication infrastructure. This is not the case in our
implementation, where the internet entry point of the
5G network is located in Frankfurt/Main (Germany),
whereas the VM is hosted in Dresden (Germany)
and the network traffic is routed via the Deutsches
Forschungsnetzwerk
8
. This leads to an additional la-
tency between 35ms and 50 ms.
5.2 Cellular Radio Network Properties
According to our mobile network provider the area
where we tested remote driving is fully covered by
8
https://www.dfn.de/en/network/
Challenges of Remote Driving on Public Roads Using 5G Public Networks
509
5G
9
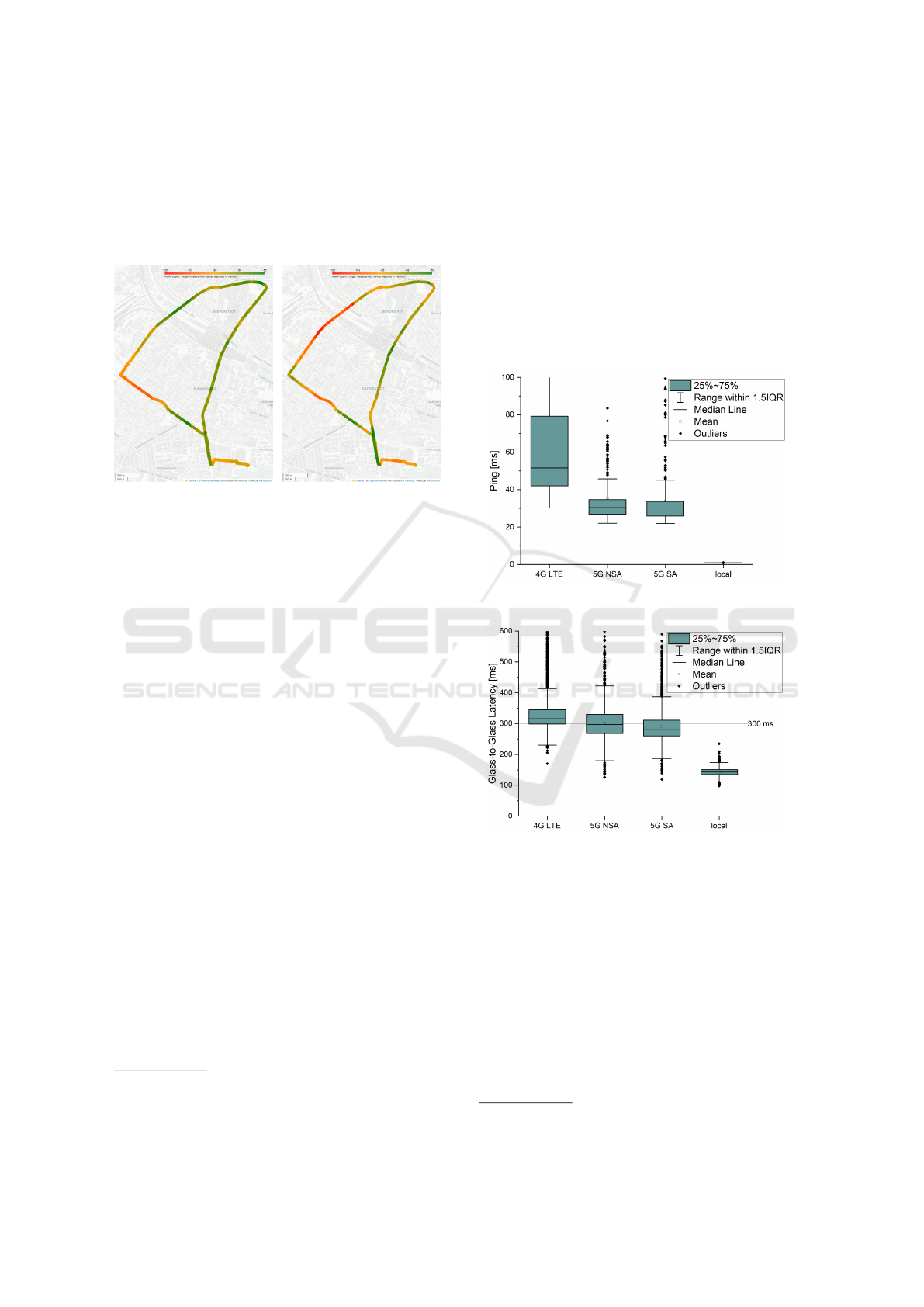
. According to our tests (see Figure 4) a notice-
able part of the track on public roads (about 5km)
was not decently covered by 5G by considering the
Reference Signal Received Power (RSRP) of less than
−100dBm). Even when restricted to LTE, the limit-
ing coverage during the test drives became obvious.
(a) 5G standalone coverage. (b) LTE coverage.
Figure 4: Measured RSRP[dBm] as network coverage in a
range between −120 dBm and −50 dBm sketched from red
to green.
The used router from Mikrotik has besides an au-
tomatic choice the ability to force the radio access
technology to LTE, 5G non-standalone (NSA) or 5G
SA. This gives us the ability to separate the test
drives with identical trajectories into each cellular ra-
dio technology. By traversing through the spanned
radio cells, rapid handovers occur which are nor-
mally initiated by the radio network. But due to the
higher frequencies of 5G cells, where our routers have
been assigned to the n78 band at 3.5 GHz band, the
entire coverage or cell size is smaller compared to
lower frequencies. That results in more intra/inter-
site handovers or even terminal induced and slow re-
connections. Furthermore, this results in a higher
number of large delays on ping level and applications
level.
As shown in Figure 5a, the median ping latency
has been observed at 50 ms while the 5G based radio
access technologies delivered similar lower levels at
30ms. The corresponding box plot is given to show
the distributions.
Higher latency levels arise when additionally con-
sidering application or glass-to-glass latency (see Fig-
ure 5b). To measure the glass-to-glass latency, the
rear-view camera was temporarily directed to a screen
displaying a synchronized clock (using chrony
10
).
The remote driving station runs a Python script which
9
https://www.vodafone.de/hilfe/netzabdeckung.html,
date: 21.02.2024
10
https://chrony-project.org/
calculates the difference between the displayed re-
mote clock and the workstation’s synchronized clock.
The script takes screenshot, and user optical character
recognition (OCR) (tesserocr
11
) to retrieve the remote
clock’s value. Thereby, the entire median line can be
considered at about 300ms across all radio technolo-
gies. The local latency is presented for completeness
in the outer right column to offer the lower possible
bound by using a cable-based LAN. This means for
our camera setup, at least 150 ms come from the video
en-/decoding in conjunction with the TCP-based data
packets.
(a) The ping statistics split into the radio technologies.
(b) The glass-to-glass latencies by radio technologies.
Figure 5: The ping and glass-to-glass latency statistics for
the covered area, reduced to the north of rail tracks.
Finally, it should be mentioned that the required
video bandwidth occupies the cellular uplink signifi-
cantly, while most network provider optimize the traf-
fic flow for streaming applications in the downlink.
The vehicle’s front camera consumes about 16Mbit/s
and two side cameras and the rear camera add three
4Mbit/s streams.
11
https://pypi.org/project/tesserocr/
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
510

5.3 Camera Placement
The cameras directed through the left and right front
windows, and which are displayed on the side screens
are placed parallel to the windshield (see Figure 6).
Its placement under the rear-mirror induce a smaller
blind-spot for the left A-pillar, but when human
drivers can move the head to move the blind-spot the
remote driver can not move the cameras.
Figure 6: Placement of the 3 front cameras.
A second consequence of this placement is that
under certain light conditions, and even using po-
lar filters, the light reflection displayed to the remote
driver can be disturbing (see side screens in Figure
2a). The problem does not appear on the center dis-
play because the camera is close to the windshield.
The solution used by Vay with cameras outside of
the car has the advantage to tackle both problems but
needs outdoor equipment.
5.4 HUD Necessity for Remote Driving
A Head-Up Display (HUD) is composed of graphic
overlays on top of the remote driving station screen
that present useful information to the remote driver.
The already used overlays (see Figure 2a) are the ve-
hicle speed and the status of steering and acceleration
CAN interfaces, where the last two are mainly impor-
tant for the startup routine.
Vehicle path guidelines should be added to the
HUD as a new overlay. As shown in Figure 2, not
leaving the lane while driving on public road is chal-
lenging for the remote drivers. It is mainly because
the current lane takes just a small proportion of the
entire screen in front of the car, whereas the vehicle
fill the whole bottom of the center display. Thus the
vehicle width is harder to estimate than for sitting be-
hind the vehicle’s steering wheel. Therefore, guide-
lines which indicate the future vehicle path would be
a useful HUD overlay as demonstrated by Vay
12
.
12
https://youtu.be/hcnRSedBDgU
5.5 Encoding Latency
Even if the cameras used here are way faster than
those we used in our first demonstrator (Kl
¨
oppel-
Gersdorf. et al., 2023a), the current glass-to-glass
latency in a local network (ping <1 ms) is around
150ms as shown in Figure 5b. The latency induced by
encoding and decoding task using a stable 5G cam-
pus network was enough to stay under the 300ms,
but with the performance of our network provider, we
probably need to upgrade the camera once again.
This latency can be considered as encoding time
since the high-end graphic card of the decoding com-
puter as well as its processor usages are very low. As
it is not possible to access the RAW video output of
these cameras, reducing the encoding latency means
using other camera with an external encoder. Our new
car computer’s high-end graphic card can be used for
this task (see 3.1). If it is not sufficient an upgrade
to an expensive hardware encoder allowing glass-to-
glass latency about 10ms should be considered.
6 CONCLUSION
This paper presents a 5G public network remote driv-
ing demonstrator with its limits. The performance on
our test track is satisfying, as the 5G public network
connection from our network provider is sufficient
there. But even on our test track we encountered some
lags due to insufficient public network coverage. In
areas with a sufficient coverage and a non saturated
network a 5G SA campus network is not mandatory.
The authors were not able to find a 5km circuit on
public roads in Dresden with a decent coverage, at
least using our network provider.
The feasibility of remote driving on public roads
using public networks is already shown with the first
commercial usage. But neither Vay nor its competi-
tors communicate the limits of their systems. From
our point of view exploring the limits of an affordable
demonstrator and communicating them is still needed
to ensure feasible Operational Design Domain (ODD)
for remote driving as well as to encourage the accep-
tance of commercially viable remote driving.
Areas of application for remote driving result from
the sum of mobility needs from a transport perspec-
tive, the infrastructure design of roads and urban dis-
tricts, which is described by the ODD, and last but
not least the performance indicators of the mobile
network to ensure a reliable communication between
technical supervision and vehicle. Further research
should define a set of network Key Performance Indi-
cator (KPI) required to drive remotely in specific con-
Challenges of Remote Driving on Public Roads Using 5G Public Networks
511

ditions (weather, speed, city, highways, etc.) and cer-
tain ODD. That’s why we plan to upgrade our demon-
strator with new cameras (see 5.5) as well as extend
our tests to other network providers and places (cities
as well as countryside).
ACKNOWLEDGEMENTS
This research is financially supported by the German
Federal Ministry for Digital and Transport (BMDV)
under grant numbers FKZ 45FGU141 B (DiSpoGo)
and FKZ 19FS2020 F (LAURIN) as well as co-
financed by the Connecting Europe, Facility of the
European Union (C-ROADS Urban Nodes).
REFERENCES
Domingo, M. C. (2021). An overview of machine learning
and 5g for people with disabilities. Sensors, 21(22).
Gnatzig, S., Chucholowski, F., Tang, T., and Lienkamp, M.
(2013). A system design for teleoperated road vehi-
cles. In ICINCO (2), pages 231–238.
ISO 26262-10:2018 (2018). ISO 26262-10:2018 Road ve-
hicles – Functional safety – Part 10: Guidelines on
ISO 26262. Standard, ISO.
Kakkavas, G., Nyarko, K. N., Lahoud, C., K
¨
uhnert, D.,
K
¨
uffner, P., Gabriel, M., Ehsanfar, S., Diamanti,
M., Karyotis, V., M
¨
oßner, K., and Papavassiliou, S.
(2022). Teleoperated support for remote driving over
5g mobile communications. In 2022 IEEE Interna-
tional Mediterranean Conference on Communications
and Networking (MeditCom), pages 280–285.
Kim, J., Choi, Y.-J., Noh, G., and Chung, H. (2022).
On the feasibility of remote driving applications over
mmwave 5 g vehicular communications: Implementa-
tion and demonstration. IEEE Transactions on Vehic-
ular Technology, pages 1–16.
Kl
¨
oppel-Gersdorf., M., Bellanger., A., F
¨
uldner., T., Sta-
chorra., D., Otto., T., and Fettweis., G. (2023a).
Implementing remote driving in 5g standalone cam-
pus networks. In Proceedings of the 9th Interna-
tional Conference on Vehicle Technology and Intel-
ligent Transport Systems - VEHITS, pages 359–366.
INSTICC, SciTePress.
Kl
¨
oppel-Gersdorf., M., Bellanger., A., and Otto., T.
(2023b). Identifying challenges in remote driving.
Submitted to 9th International Conference, VEHITS
2023, Revised Selected Papers.
Liu, R., Kwak, D., Devarakonda, S., Bekris, K., and Iftode,
L. (2017). Investigating remote driving over the lte
network. In Proceedings of the 9th International Con-
ference on Automotive User Interfaces and Interac-
tive Vehicular Applications, AutomotiveUI ’17, page
264–269, New York, NY, USA. Association for Com-
puting Machinery.
Neumeier, S., Wintersberger, P., Frison, A. K., Becher, A.,
Facchi, C., and Riener, A. (2019). Teleoperation: The
holy grail to solve problems of automated driving?
sure, but latency matters. pages 186–197.
Ralf Globisch, J. G. T. (2023). Deep dive: How to break the
congestion barrier – achieving low latency with high
throughput for safe teledriving. Technical report, Vay
Technology GmbH. https://vay.io/how-to-break-the
-congestion-barrier-achieving-low-latency-with-hig
h-throughput-for-safe-teledriving.
Saeed, U., H
¨
am
¨
al
¨
ainen, J., Garcia-Lozano, M., and
David Gonz
´
alez, G. (2019). On the feasibility of
remote driving application over dense 5g roadside
networks. In 2019 16th International Symposium
on Wireless Communication Systems (ISWCS), pages
271–276.
Sredojev, B., Samardzija, D., and Posarac, D. (2015). We-
brtc technology overview and signaling solution de-
sign and implementation. In 2015 38th International
Convention on Information and Communication Tech-
nology, Electronics and Microelectronics (MIPRO),
pages 1006–1009.
Zulqarnain, S. Q. and Lee, S. (2021). Selecting remote
driving locations for latency sensitive reliable tele-
operation. Applied Sciences, 11(21).
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
512
