
Measuring Older People’s Attitudes Towards Personal Robots
Helen Petrie
1a
and Sanjit Samaddar
2b
1
Department of Computer Science, University of York, York YO105DD, U.K.
2
School of Arts and Creative Technologies, University of York, York YO105DD, U.K.
Keywords: Older People, Personal Robots, Attitudes, Measurement.
Abstract: Robotic technologies are increasingly an important form of technology to support older people. It is important
to have easy ways of measuring their attitudes to the kinds of robots which might support them. A study was
conducted with 249 older people in the UK who viewed videos of three different types of robots (abstract, pet
and humanoid) and rated their attitudes to each using an adaptation of the Almere model questionnaire.
Analysis of the Almere Questionnaire revealed three underlying components to attitudes to the personal
robots: Positive User Experience; Anxiety and Negative Usability; and Social Presence. There were
significant differences between the three personal robots in older people’s attitudes to them, with the pet robot
having the most positive attitudes. These results are a set towards creating simple methods for developing a
clear understanding of older people’s attitudes to personal robots which may be useful in helping them choose
appropriate robots to support themselves. The results make a contribution to understanding the attitudes of
older people in the UK to three types of personal robot that they may find useful and companionable.
1 INTRODUCTION
It is well known that the world’s population is ageing,
particularly in more developed parts of the world. The
United Nations (UN, 2022) estimates that in 2020
there approximately 6% of the world population was
aged 65 or over (a widely used, if rather coarse,
criterion for “older people”). By 2050 it is estimated
that number will increase to approximately 16.0% of
the population, nearly a three-fold increase in
percentage terms. However, what is perhaps more
important than the raw numbers or percentages of
older people, is the Potential Support Ratio (PSR).
This is the ratio of the number of people of working
age (i.e. those who produce most of the wealth and
value in a society and who are also available as the
main carers for older people who need support) to the
number of older people. Europe currently has a PSR
of approximately four younger people for each older
person, although many European countries have a
PSR of less than three younger people to each older
person, and Japan has the lowest ratio in the world at
just over two younger people to each older person
(UN, 2019).
a
https://orcid.org/0000-0002-0100-9846
b
https://orcid.org/0000-0003-0332-3561
Digital technologies are often seen as a major part
of the solution to this problem (Petrie & Darzentas,
2020), with the concept of ambient/active assisted
living (AAL) emerging as early as the 1970s
(Monekosso et al., 2015) to describe “the use of
information and communication technologies in
people’s daily living and working environment to
enable them to stay active longer, remain socially
connected, and live independently into old age”
(AAL Association, n.d.). This also aligns with the
“aging in place” concept (Mynatt et al., 2000), as
most older people wish to live independently in their
own homes for as long as possible. Since the
COVID-19 pandemic and the resulting social
isolation measures, there is a particular relevance and
motivation to understand the technological support
that can be provided to older people and find solutions
to combat lowering PSR ratios globally.
There has been extensive research and
development of robotic technologies. An important
part of this research is assistance provided by robotic
technologies to provide care and support for older
people. These can range from physical care such as
encouraging activity (e.g., El Kamali et al., 2018) or
108
Petrie, H. and Samaddar, S.
Measuring Older People’s Attitudes Towards Personal Robots.
DOI: 10.5220/0012740400003699
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 10th International Conference on Information and Communication Technologies for Ageing Well and e-Health (ICT4AWE 2024), pages 108-118
ISBN: 978-989-758-700-9; ISSN: 2184-4984
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

intelligent mobility aids (e.g., López Recio et al.,
2013) to more social care such as mediating
communication and providing companionship (Feil-
Siefer & Matarić, 2011).
Robots to support older people can come in many
shapes and sizes ranging from abstract robots such as
Afobot (Fig. 1A) to pet robots such as Miro (Fig. 1B).
and humanoid robots such as Sanbot (see Fig. 1C).
With the range of functionalities and types available,
robots may be perceived as intimidating (Frennert,
2020), not useful for general day-to-day care
(Samaddar & Petrie, 2020), or not designed with the
needs of older people in mind (Eftring & Frennert,
2016). Care needs to be taken in the development of
robot technologies for older people to ensure that they
are acceptable to the varied target audience of older
people. Therefore, it is important to have instruments
to easily measure older people’s attitudes to robot
technologies.
Some research has been undertaken to measure
older people’s attitudes to robots. A widely used
measure is the Almere model (Heerink et al., 2010)
which provides a questionnaire which measures the
attitudes to “assistive social agents” by older people.
This was developed from the theoretical constructs of
the Technology Acceptance Model (TAM) developed
in the 1980s about technology in general (Davis,
1989) and was tested with Dutch older people mainly
using one small pet robot, the iCat. Other measures
have also been developed to measure attitudes to
robots by users of any age (Bartneck et al; 2009;
Nomura et al, 2008; Smarr et al, 2012). All these
measures are now over a decade old, and the
components of attitudes to robots may have changed
in that time, as there has been much more exposure to
robotic technology.
The aim of this research is to extend the work of
Heerink and colleagues in order to develop a more up-
to-date questionnaire to easily measure the attitudes
of older people to robots. We developed this
questionnaire by asking older people to react to a
range of different types that might support them:
abstract, pet and humanoid robots. We worked with a
large sample of UK older people, to complement the
Dutch participants who participated in the
development of the Almere questionnaire. We
investigated whether the theoretical constructs of the
TAM model were appropriate in this situation. This
is a first step towards a more robust questionnaire for
measuring older people’s attitudes to the robotic
technologies which might be developed to support
them.
2 RELATED WORK
2.1 Terminology for Robots for Older
People
Thus far we have used the term “robot” to refer to any
robotic technology to support older people. There is
no universally accepted or preferred term for the wide
range of robotic technologies being developed in this
area. The term “robot” has been used as an umbrella
term, with a description of the functionality preceding
the basic word, often “social robot” or “assistive
robot”. Petrie et al. (2018) found there were nearly 30
terms used in relation to robot technologies for older
people. While they suggested a classification of
robots, both physical and virtual, we propose a more
general term to refer to the technologies discussed in
this paper: “personal robot”. This term allows us to
refer to all the different types of robots and robot-like
devices now available, while not focusing particularly
on their type or use. In addition, we feel this term
provides a less stigmatizing term than “assistive
robot” and a more accessible term for a general
audience not familiar with the nuances and
differences between terms such as robot, agent, social
agent etc.
2.2 Personal Robots for Older People
Research on personal robots for older people has
mostly focused on three areas of care: physical
healthcare, supporting declining cognitive
capabilities, and social interaction and
companionship. Healthcare is by far the most
researched and developed area with robots used in a
variety of ways: to help with physical tasks
(Hebesberger et al., 2016), health monitoring
(Rosales et al., 2017), smart walkers (Sinn & Poupart,
2011), and fall detection (Mundher & Zhong, 2014).
To support and aid with cognitive decline and
provide coaching in this area there are robots that
have been designed to act as coaches for both physical
and cognitive tasks. One example is a robot that
provides mental games and tasks for a user to do and
tailors the games to suit the user’s level of cognitive
ability (Agrigoroaie & Tapus, 2016). Other robots
combine both entertainment and cognitive
stimulation by providing games such as bingo (Li et
al., 2016) or a card matching memory game (Khosla
& Chu, 2013). Lastly, there is an abundance of
research into pet robots and other robots that provide
a means of social interaction and which aim to combat
loneliness for older people. Pet robots provide
companionship like a real pet but are sometimes more
Measuring Older People’s Attitudes Towards Personal Robots
109

suited for older people who may not be capable of
taking care of a real pet’s needs. The most well-
known is probably Paro (Wada & Shibata, 2007), a
small, furry baby seal robot that reacts to touch. Paro
has had a significant positive influence on older
people’s lives at care homes. Following this
innovation, there has been much research into pet
robots including other animals as diverse as koalas,
penguins, and dogs (Lazar et al., 2016).
2.3 Measuring Older People’s
Attitudes to Personal Robots
Heerink et al. (2008, 2009, 2010) investigated the
attitudes to “assistive social agents” by older people,
and developed the Almere model and questionnaire.
The Almere questionnaire includes 41 items divided
into 12 different constructs derived from TAM (see
Table 1). Different parts of the model were validated
in four experiments with older people and several
social robots. We argue that while the model and
results are strong, the model was created on the
theoretical model of the TAM rather than empirical
work with older people and therefore would benefit
from further validation with data from a large sample
of older people, as it is not clear that these constructs
are both sufficient and necessary. In addition, there
have been many studies that have adapted the Almere
model, selecting only specific constructs that apply,
to measure or predict acceptance. For example,
removing the social constructs if the robot’s core
functionality is not social in nature (e.g.,
Karunarathne et al., 2019). But taking always small
parts of a questionnaire can be a threat to the validity
of the instrument. These points all provide motivation
to extend Heerink et al’s work to see if a more general
model can be developed for understanding older
people’s attitudes towards personal robots.
In this paper we will build on the work by Heerink
and colleagues on their Almere model by
investigating the reactions of a large sample of older
people in the UK with three types of personal robots.
This will allow us to investigate the underlying
structure of their attitudes to personal robots based
directly on their data. It should also allow us to
conduct a preliminary investigation of similarities
and differences between their attitudes to the three
different types of personal robots used in the study:
abstract, pet and humanoid. We will investigate two
research questions:
RQ1: Are the Almere model constructs
appropriate to describe UK older people’s attitudes to
three types of personal robots?
RQ2: How do attitudes to the three robots differ
on the most appropriate set of constructs?
Table 1: Almere model constructs (source: Heerink et al.,
2010).
Construct Definition
Anxiety Evoking anxious or emotional
reactions when using the system
Attitude Positive or negative feelings about the
appliance of the technology
Facilitating
Conditions
Objective factors in the environment
that facilitate using the system
Intention to
Use
The outspoken intention to use the
system over a longer period of time
Perceived
Adaptability
The perceived ability of the system to
be adaptive to the changing needs of
the user
Perceived
Enjoyment
Feelings of joy or pleasure associated
by the user with the use of the system
Perceived
Ease of Use
The degree to which the user believes
that using the system would be free of
effort
Perceived
Sociability
The perceived ability of the system to
perform sociable behaviour
Perceived
Usefulness
The degree to which a person believes
that using the system would enhance
his or her daily activities
Social
Influence
The user’s perception of how people
who are important to him/her think
about him/her using the system
Social
Presence
The experience of sensing a social
entity when interacting with the system
Trust The belief that the system performs
with personal integrity and reliability
3 METHOD
3.1 Design
A within-participants online study was conducted. To
investigate older adults’ initial understanding of the
idea of a “personal robot”, participants were initially
asked to describe what the term meant to them in an
open-ended question. To assess older people’s
attitudes to personal robots, participants watched one-
minute videos of three robot types (abstract: Afobot;
pet: MiRo; humanoid: Sanbot; see Figure 1), each
video contained several examples of the robot type
ICT4AWE 2024 - 10th International Conference on Information and Communication Technologies for Ageing Well and e-Health
110

Figure 1: The three personal robots (A: Afobot; B: MiRo; C: Sanbot).
and a range of functions they could perform to assist
older people to live independently at home. A large
sample of participants was required for the validation
planned, so it was not possible to have each
participant actually interact with each robot. In
addition, this research was conducted at the end of the
coronavirus pandemic, when there was a possibility
that social isolation regulations might be re-imposed
which would prohibit in-person research, particularly
with older participants.
After each video participants were asked two
attention check questions to make sure they had
watched the video (these asked for factual
information about the video) and then completed a set
of questions based on the Almere questionnaire. The
order of presentation of the three videos and the order
of the items within the questionnaire were
counterbalanced to avoid practice and fatigue effects.
Ethical approval for the study was given by the
Physical Sciences Ethics Committee of the University
of York.
3.2 Participants
Inclusion criteria were to be 60 years or older, to be
living in the United Kingdom and living
independently (rather than in sheltered
accommodation or a care facility). Participants were
recruited via announcements of a variety of channels:
a local community website, the University of York
news bulletin and Slack channel, and the Prolific
research participant website (prolific.co).
Participants recruited via Prolific were offered GBP
2.00 (approximately USD 2.47, 2.28 euros) for their
time, for the other participants, the researchers paid
GBP 2.00 to the Disasters Emergency Committee
(dec.co.uk) to support work with people in
Afghanistan and the Ukraine.
261 people were recruited and completed the
online study. However, 12 (4.6%) participants
answered more than half the attention check questions
incorrectly, so their data was removed, leaving 249
participants.
Demographic information about the participants
is summarized in Table 2. 153 (61.4%) participants
were in their 60s, 89 (35.7%) were in their 70s and 7
(2.8%) were in their 80s. There was a good gender
balance and a good range of educational
backgrounds. Participants were asked their current or
last occupation and there was a wide range from
builder and bus driver to IT project manager and
biomedical scientist.
Table 2: Demographic information for the participants.
Age Range: 60 - 87 years
Median: 68 years
Gender Women: 134 (53.8%)
Men: 115 (46.2%)
Other 0 (0.0%)
Education High School: 107 (43.0%)
Bachelor degree: 75 (30.1%)
Higher degree: 33 (13.3%)
Professional qualification: 34 (13.7%)
Employment Full-time/Self Employed: 25 (10.0%)
Part-time/Self Employed: 31 (12.4%)
Retired: 193 (77.5%)
Participants were asked to rate their confidence
with computers and with using the Internet on 7-point
Likert items (not at all confident = 1 to very confident
= 7). The median rating for confidence with
computers was 6.0 (semi-interquartile rating (SIQR):
0.5), which was significantly above the midpoint of
Measuring Older People’s Attitudes Towards Personal Robots
111

the scale (Wilcoxon one sample signed rank test T =
11.16, p < .001). The median rating for confidence
with the Internet was also 6.0 (SIQR: 0.05), also
significantly above the midpoint of the scale
(Wilcoxon T = 13.17, p < .001).
Participants were asked whether they had any
experience of personal robots, 39 (15.7%) reported
that they had. The most frequently mentioned type
was robotic vacuum cleaners (mentioned by 32
participants); virtual assistants (e.g., Alexa, Siri) were
mentioned as robots by 9 participants; robotic lawn
mowers (4 participants); industrial/manufacturing
robots (2 participants); information robots at airports,
robotic mops, robotic swimming pool cleaners,
robotic turtles for education were all mentioned by
one participant each.
3.3 Materials
The online study was deployed using the Qualtrics
online survey tool (www.qualtrics.com). The study
comprised three sections:
1. Information page, informed consent
2. Robot videos and Almere Questionnaire
3. Demographic information and thanks.
1. Information page, informed consent: the study
opened with an information screen about what would
be involved in participating in the study, information
about confidentiality and anonymity and how to
withdraw from the study if wished. An informed
consent form then followed.
2. Videos of personal robots and Almere
Questionnaire
Participants were shown three videos of different
types of personal robot (abstract, pet and humanoid,
those illustrated in Figure 1), each video was
approximately one minute long (videos available
from the authors). Each video comprised publicly
available footage of the robot and showed a number
of functions typical of that robot. To orient the
participants, each video was preceded by a short text
introduction to the robot type. These introductions
were all approximately 75 words long and with the
same amount of information (see Table 3).
Each video was followed by two multiple choice
attention check questions which asked for specific
concrete details of the video content, to enable us to
check that participants had watched the video
carefully. Participants then completed a 39 item
questionnaire adapted from the Almere questionnaire
(Heerink et al., 2010). Our questionnaire was two
items shorter than the original Almere questionnaire
(which comprised 42 items), as the original
questionnaire included three statements about
intention to use the robot in the next few days. As this
was not a possibility for participants in this study,
these statements were replaced by one statement “I
would use the [name] robot if offered one”.
The questionnaire consisted of 39 statements
about the robot on a 7-point rating scale from
Strongly Disagree (coded as 1) to Strongly Agree
(coded as 7). Heerink and colleagues asked older
people to rate these statements after they had
interacted with a robot for a short period of time (e.g.,
I think the [name] robot is useful to me), whereas in
this study participants had only seen the robot in the
video, so the formulation of the statements was
changed to the hypothetical form (e.g., I think the
[name] robot would be useful to me). This resulted
in only minor changes to the wording of the
statements in the Almere questionnaire.
3. Demographic information and thanks
Participants were asked demographic questions and
thanked for their participation in the study.
Table 3: Text introductions to the three personal robot
videos.
Afobot is a tabletop personal robot. It has a screen
that will rotate towards you when you speak to it and
will understand your voice commands (like Alexa
and Siri). It can assist in a range of activities of daily
life such as reminding you of appointments or taking
your medicines. It can quickly connect you to your
family and friends via voice or video calls and can
take and send photos for you.
MiRo is a pet-like personal robot. It can move
around independently, but will also be attracted by
human movement and sounds. You can train it to
respond to particular actions like clapping your
hands as you might a pet. It also responds to being
stroked by moving its head, ears, and tail and
changing colour. It also makes animal-like sounds. It
can show different emotions with these features and
goes to "sleep" automatically to recharge itself.
Sanbot is a human-like personal robot with a head
and arms and a screen. It can move around
independently and can recognise different people
using face recognition. It will also understand voice
commands. It can assist in a range of activities of
daily life such as reminding you of appointments or
taking your medicines. It can quickly connect you to
your family and friends via voice or video calls and
monitor your health by linking with a smartwatch.
ICT4AWE 2024 - 10th International Conference on Information and Communication Technologies for Ageing Well and e-Health
112

4 RESULTS
To investigate RQ1(Are the Almere model constructs
appropriate to describe older people’s attitudes to
three types of personal robots?), we first investigated
whether the rating for each of the attitude statements
within each Almere construct were consistent with
each other. Cronbach’s alpha, a measure of internal
consistency, was calculated for each construct, but
separately for each robot type. A Cronbach’s alpha of
at least 0.80 is considered adequate consistency for
this kind of data (Nunnally & Bernstein, 1994).
Table 4 presents the Cronbach’s alpha results for
the 11 Almere constructs we measured with more
than one statement (as noted above, Intention to Use
was measured by only one statement). It is interesting
that the consistency measure is very similar across the
three robots for most of the constructs; only on
Perceived Ease of Use and Social Presence was it
very different. However, a number of the constructs
failed to reach an adequate level of consistency for
any of the three robots: Facilitating Conditions,
Perceived Adaptability, and Perceived Ease of Use.
Social Influence and Social Presence failed to reach
consistency for MiRo, and Anxiety just failed to reach
consistency for both Afobot and MiRo. Only on six
of the 11 constructs was consistency reached for all
three robots (we will include Anxiety as consistent, as
this was marginal). Thus, the statements in the
Almere questionnaire, for these participants and these
robots, do not always provide consistent measures of
the constructs they are designed to measure.
Therefore, to investigate whether there is an
alternative to the Almere constructs, that is a
statistically reliable set of underlying meaningful
constructs in older participants’ attitudes to the
personal robots, a Principal Components Analysis
(PCA) was conducted on the Almere Questionnaire
responses, again for each personal robot separately
(see Table 5).
For Afobot and Sanbot, three componennts
3
produced the most appropriate solutions (in terms of
proportion of variance accounted for and semantic
grouping of items): for Afobot 62.1% of the variance
in responses was accounted for, and for Sanbot
64.7%. These are very adequate proportions of the
variance accounted for.
3
We will use component to refer to the results of the
PCA to avoid confusion with the theoretically derived
constructs in the Almere questionnaire.
Table 4: Cronbach’s alpha for each of the Almere model
constructs for each personal robot.
Afobot MiRo Sanbot
Anxiety 0.79 0.79 0.81
Attitude 0.91 0.91 0.91
Facilitating
Conditions
0.75 0.70 0.75
Perceived
Adaptability
0.59 0.62 0.53
Perceived
Enjoyment
0.92 0.94 0.94
Perceived Ease
of Use
0.60 0.33 0.75
Perceived
Sociability
0.88 0.87 0.88
Perceived
Usefulness
0.89 0.90 0.92
Social Influence 0.80 0.77 0.82
Social Presence 0.86 0.63 0.90
Trust 0.91 0.90 0.90
The three components can be summarized as:
Positive User Experience (PUX): includes the
usefulness and adaptability of the robot, as well as the
pleasure of interacting with the robot.
Anxiety and Negative Usability (AnxNegU):
includes anxieties about knowing how to interact
with the robot, and usability issues, but in a negative
sense (i.e. that it would be difficult to learn to use and
the person would need help)
Social Presence (SocPres): the sense that the robot
is a living, sentient being.
For MiRo, two components produced the most
appropriate solution, accounting for 56.4% of the
variance. However, the components were very similar
to those of the other two robots, the difference being
that the SocPres items grouped with the PUX items
rather than creating a separate component.
Thus, there are meaningful groupings of the
attitudes statements, based on the participants own
ratings, which are meaningful and create a simpler
model for studying attitudes to personal robots for
older people than the complex set of contstructs
proposed by TAM.
Measuring Older People’s Attitudes Towards Personal Robots
113

Table 5: Components extracted from PCAs on responses to Almere Questionnaire for each personal robot.
Afobot MiRo Sanbot
Positive User Experience (PUX)
I think it would be a
g
ood idea to use the [X] robo
t
xx x
The [X] robot would make life more interestin
g
xx x
It would be
g
ood to make use of the [X] robo
t
xx x
I would use the [X] robot if offered one x x x
I think the [X] robot would be adaptive to what I nee
d
xx x
I think the [X] robot would only do what I need at that particular
momen
t
x x x
I think the [X] robot would help me when I considered it to be
necessar
y
x x x
I would en
j
o
y
the [X] robot talkin
g
to me x x x
I would en
j
o
y
doin
g
thin
g
s with the [X] robo
t
xx x
I would find the [X] robot en
j
o
y
able x x x
I would find the [X] robot fascinatin
g
xx x
I would find the [X] robot borin
g
[reversed] x x x
I would think the [X] robot would be nice x x x
I think the [X] robot would be useful to me x x x
It would be convenient for me to have the [X] robo
t
xx x
I think the [X] robot would help me with man
y
thin
g
sxx x
I think m
y
famil
y
and friends would like me usin
g
the [X] robo
t
xx x
I think it would
g
ive a
g
ood impression if I were to use the [X] robo
t
xx x
I would find the [X] robot pleasant to interact with x x
When interacting with the [X] robot I would feel like I’m talking to a
real bein
g
x
It would feel as if the [X] robot is reall
y
lookin
g
at me x
I could ima
g
ine the [X] robot to be a livin
g
creature x
I would think the [X] robot is a real bein
g
x
The [X] robot would seem to have real feelin
g
sx
I would consider the [X] robot a pleasant conversational partne
r
x
I would feel the [X] robot would understand me x
Anxiety-Negative Usability (Anx-NegU)
If I were to use the [X] robot, I would be afraid to make mistakes with
it
x x x
If I were to use the [X] robot, I would be afraid to break somethin
g
xx x
I would find the [X] robot intimidatin
g
xx
I have ever
y
thin
g
I would need to use the [X] robot (R) x x x
I know enough about the [X] robot to be able to make good use of it
(R)
x
I think I would know quickl
y
how to use the [X] robot (R) x x x
I would find the [X] robot eas
y
to use (R) x x x
I think I would be able to use the [X] robot without an
y
help (R) x x x
Social Presence (SocPres)
When interacting with the [X] robot I would feel like I’m talking to a
real bein
g
x x
I could ima
g
ine the [X] robot to be a livin
g
creature x x
I would think the [X] robot is a real bein
g
x x
The [X] robot would seem to have real feelin
g
sx x
ICT4AWE 2024 - 10th International Conference on Information and Communication Technologies for Ageing Well and e-Health
114
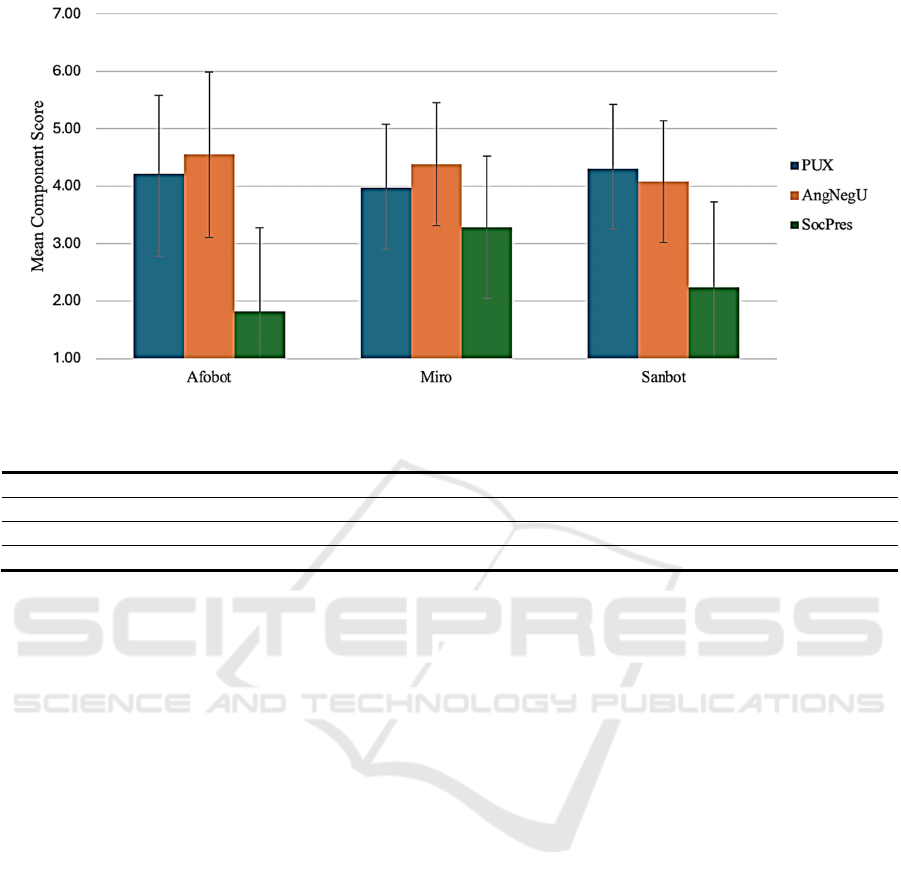
Figure 2: New Almere-derived component scores for the three personal robots.
Table 6: Summary of repeated measures ANOVA on the new components for the three robots.
Source F value df p value Effect size (ηp
2
)
Robot t
y
pe 39.15 1.99, 492.70 < 0.001 0.136
Almere componen
t
317.35 1.68, 415.75 < 0.001 0.561
Robot x Almere 189.06 3.78, 937.15 < 0.001 0.433
To investigate RQ2 (How do attitudes to the three
robots differ on the most appropriate set of
constructs?), participants’ scores on the proposed
three component structure of the Almere items was
calculated for all three robots (although this was not
the best solution for MiRo, the three component
model was used for this robot to allow comparison
with the other two) with the AnxNegU component
ratings reversed, so that a high rating always indicates
a positive attitude (in the case of AnxNegU, not being
anxious or knowing how to interact with the robot).
Fig. 2 illustrates the mean component ratings.
A repeated measures analysis of variance
(ANOVA) was then conducted on the component
ratings for the three robots. The results are
summarized in Table 6. Overall, there was a
significant difference with a large effect size between
the three robots. MiRo had the most positive ratings,
post hoc analysis showed this was significantly higher
than either Afobot or Sanbot which did not differ
significantly from each other. There was also a
significant difference between the three components.
PUX and AnxNegU had significantly higher ratings
than SocPres. There was also a significant interaction
between robot and component. As can be seen from
Fig. 2, this was largely caused by SocPres being much
higher for MiRo than the other two robots.
5 DISCUSSION AND
CONCLUSIONS
This study investigated how to measure the attitudes
of older people to a range of personal robots, using a
large sample of older people in the UK and three
different personal robot types. The study had the dual
aims of moving towards a robust measure for
measuring such attitudes and conducting a
preliminary investigation into the attitudes of older
people to three different types of personal robots. The
research built on and extended the work by Heerink
and colleagues on their Almere model.
The first analysis investigated whether the
constructs in the Almere model, which were derived
theoretically from the TAM model of technology
acceptance (Davis, 1989) would show internal
consistency with a large UK sample of older people,
given that Heerink and colleagues had worked with
older people in the Netherlands. Heerink et al. (2008,
2009, 2010) themselves note the need for testing with
larger samples of participants and participants in
difference circumstances.
Six of the 11 constructs showed adequate
consistency of items and consistency across three
Measuring Older People’s Attitudes Towards Personal Robots
115

different types of personal robots, which was
encouraging . However, there were constructs which
showed low consistency (Facilitating Conditions,
Perceived Adaptability, Perceived Ease of Use,
marginally Anxiety) or inconsistent results
(Perceived Ease of Use, Social Presence). Some of
these issues may have been due to differences
between the particular robots and the robot types,
although one would hope for consistency of items
across a range of robots.
Therefore, a series of PCAs were conducted on
the ratings to investigate whether there was a more
meaningful set of underlying components. These
analyses showed very similar grouping of attitude
ratings for two of the personal robots, Afobot and
Sanbot. Only one group of ratings, related to social
presence, were different for MiRo. MiRo is an
animal-like robot (its developers deliberately based
MiRo’s design on a number of small mammals
kittens, dogs, rabbits, to make a “generic
mammalian” form, Collins et al., 2015), whereas
Afobot and Sanbot have more human-like qualities,
which may account for this difference. Although
Afobot does not look very human-like, it speaks in a
human way. Therefore, we propose that all three
components (Positive User Experience,
Anxiety/Negative Usability, and Social Presence)
may be useful high level components of attitudes to
personal robots which can be helpful in studying
robotic technologies to support older people. Further
research and psychometric development of a scale
(DeVellis, 2003) incorporating these components is
needed, using different robots within each type,
particularly to tease out the role social presence as a
separate component in pet robots such as MiRo.
An analysis with the new sets of components, to
investigate differences in the attitudes of the UK
sample of older people towards the three personal
robots. There were highly significant differences
between the robots overall and on all three
components. Of particular interest was the fact that
MiRo received the most positive ratings, due to
significantly higher social presence ratings (an
interesting point, given the issues of how social
presence grouped with other attitudes for MiRo).
This was not surprising, as MiRo was explicitly
designed to interact with the user at an emotional
level and to have numerous characteristics of a pet
animal. Thus, the attitude components do clearly
discriminate between these three different personal
robots of three different types.
The research has several important limitations
that require discussion. Firstly, participants only
viewed videos of the personal robots and did not
interact with them face-to-face. This has several
consequences. Participants did not get a chance to
explore the robot’s behaviour themselves and its
reactions to their own behaviour. This may be
particularly important of issues of perceived
adaptability, which would have been hard to judge
from just watching a video. In addition, as we wanted
to keep the videos short in an online study which
included a lot of ratings and questions for the
participants, so each video only included one example
of each robot type. This had both advantages and
disadvantages. It meant that the participants were
reacting to a specific personal robot, so the ratings are
not a combination of reactions to potentially slightly
different robots within one type. However, they only
represent one example of that robot type and further
research is vital on each robot type and between robot
types to understand commonalities and differences (a
point also made by Heerink et al., 2008, 2009).
Finally, although we tried very hard to make the
videos comparable and show a range of situations and
functions for each personal robot, we used publicly
available videos, so the three videos were not a tightly
controlled set and this may have introduced
differences we are not completely aware of.
Another limitation was that the study was
conducted online, rather than face-to-face, which
would have enabled us to recruit a more diverse
sample of older people. However, the study required
data from a large number of participants for the
analyses we wished to conduct, and we did not have
the resources or stamina to undertake face-to-face
sessions with nearly 250 older people. In addition, as
the study was conducted towards the end of the
COVID-19 pandemic, we were also very concerned
that if we planned for face-to-face sessions, another
social distancing situation might arise and we would
not be able to proceed with the study. Finally, we
were concerned that older people might be reluctant
to participate in face-to-face sessions because of the
risk of COVID-19 infection. However, we chose the
three personal robots in the study because we do have
each of these robots in our laboratories. We are
planning smaller scale follow-up studies in which
older people will actually interact with the robots.
This will allow us to compare the attitudes developed
from watching videos to the attitudes developed from
live interaction. An investigation of such differences
will be of interest in itself, as in the future older
people may well choose a personal robot from
watching a video on television or the Internet, rather
than being able to interact with it live.
A final limitation is that the sample of older
people was an opportunistic one. As the study was
ICT4AWE 2024 - 10th International Conference on Information and Communication Technologies for Ageing Well and e-Health
116

conducted online and required people to be able to
access the questionnaire software and watch videos
embedded in the questionnaire, this may mean the
sample is biased towards participants more proficient
and comfortable with technology. Certainly, the fact
that participants rated themselves as significantly
above the midpoint of the scale on confidence with
computers and the Internet suggests this. We used the
Prolific participant recruitment website, which also
requires a certain confidence with the internet and
interest in new technology, but we also made
considerable efforts to recruit older participants
through other routes as well, in order to create a more
heterogeneous sample. The wide range of
occupations of participants showed that they were
quite a diverse range of British society. However,
they were also relatively young older people – the
majority were in their 60s, so this is definitely a study
about the attitudes of “young old” UK people to
personal robots.
In conclusion, this study has made a contribution
towards developing a questionnaire to easier measure
older people’s attitudes to personal robots. It has
extended the work on the Almere model with a large
sample of older people in the UK, showing an
underlying grouping of attitudes to personal robots
which may be useful in future work. Given that it is
highly likely that older people will increasingly be
using personal robots to support themselves in the
future, having simple methods for developing a clear
understanding of their attitudes to such technology is
very important. The study has also made a initial
contribution to understanding the attitudes of older
people in the UK to three types of personal robot that
they may find useful and companionable in the near
future.
ACKNOWLEDGEMENTS
We would like to thank all the participants in this
study for their time and efforts, which were quite
considerable. We would also like to thank Jing Hou
for assisting with the first round of data collection for
the study.
REFERENCES
Agrigoroaie, R.M., & Tapus, A. (2016). Developing a
Healthcare Robot with Personalized Behaviors and
Social Skills for the Elderly. Proceedings of the
Eleventh ACM/IEEE International Conference on
Human Robot Interaction. pp. 589–590. IEEE Press.
Ambient Assisted Living Association (n.d.) Aging well in
the digital world, http://www.aal-europe.eu.
Bartneck, C., Kulić, D., Croft, E., & Zoghbi, S. (2009).
Measurement instruments for the anthropomorphism,
animacy, likeability, perceived intelligence, and
perceived safety of robots. International Journal of
Social Robotics. 1, 71–81.
Collins, E.C., Prescott, T.J., Mitchinson, B., & Conran, S.
(2015). MIRO: A versatile biomimetic edutainment
robot. Proceedings of the 12th International
Conference on Advances in Computer Entertainment
Technology (ACE '15). ACM Press.
Davis, F.D. (1989). Perceived usefulness, perceived ease of
use, and user acceptance of information technology.
Management and Information Systems Quarterly,
13(3), 319 – 340.
Eftring, H., & Frennert, S. (2016). Designing a social and
assistive robot for seniors. Zeitschrift für Gerontologie
und Geriatrie, 1–8.
El Kamali, M., Angelini, L., Caon, M., Andreoni, G.,
Khaled, O.A., & Mugellini, E.: (2018). Towards the
NESTORE e-Coach: A Tangible and Embodied
Conversational Agent for Older Adults. Proceedings of
the 2018 ACM International Joint Conference and 2018
International Symposium on Pervasive and Ubiquitous
Computing and Wearable Computers. pp. 1656–1663.
ACM Press.
Feil-Seifer, D., & Matarić, M.J. (2011). Socially assistive
robotics. Robotics & Automation Magazine, 18, 24–31.
Frennert, S. (2020). Expectations and sensemaking: Older
People and Care Robots In Gao, Q., & Zhou, J. (Eds.),
Human Aspects of IT for the Aged Population.
Technology and Society (HCII 2020). Lecture Notes in
Computer Science 12209. Springer.
Hebesberger, D., Dondrup, C., Koertner, T., Gisinger, C.,
& Pripfl, J. (2016). Lessons learned from the
deployment of a long-term autonomous robot as
companion in physical therapy for older adults with
dementia: a mixed methods study. Proceedings of the
Eleventh ACM/IEEE International Conference on
Human Robot Interation. ACM Press.
Heerink, M., Kröse, B., Evers, V., & Wielinga, B. (2008).
The influence of social presence on acceptance of a
companion robot by older people. Journal of Physical
Agents, 2, 33–40.
Heerink, M., Krose, B., Evers, V., & Wielinga, B. (2009).
Measuring acceptance of an assistive social robot: a
suggested toolkit. Proceeding of RO-MAN 2009: The
18th IEEE International Symposium on Robot and
Human Interactive Communication. pp. 528–533.
Heerink, M., Kröse, B., Evers, V., & Wielinga, B. (2010).
Assessing acceptance of assistive social agent
technology by older adults: The Almere model.
International Journal of Social Robotics. 2, 361–375.
Karunarathne, D., Morales, Y., Nomura, T., Kanda, T., &
Ishiguro, H. (2019). Will older adults accept a
humanoid robot as a walking partner? International
Journal of Social Robotics, 11, 343–358.
Khosla, R., & Chu, M.-T. (2013). Embodying care in
Matilda: An affective communication robot for
Measuring Older People’s Attitudes Towards Personal Robots
117

emotional wellbeing of older people in Australian
residential care facilities. ACM Transactions on
Management Information Systems, 4, 18:1--18:33.
Lazar, A., Thompson, H.J., Piper, A.M., & Demiris, G.
(2016). Rethinking the design of robotic pets for older
adults. Proceedings of the 2016 ACM Conference on
Designing Interactive Systems. pp. 1034–1046. ACM
Press.
Li, J., Louie, W.-Y.G., Mohamed, S., Despond, F., & Nejat,
G. (2016). A Uuer-Study with Tangy the bingo
facilitating robot and long-term care residents. IEEE
International Symposium on Robotics and Intelligent
Sensors.
López Recio, D., Márquez Segura, L., Márquez Segura, E.,
& Waern, A. (2013). The NAO models for the elderly.
ACM/IEEE International Conference on Human-Robot
Interaction, 187–188.
Monekosso, D.N., Flórez-Revuelta, F., & Remagnino, P.
(2015). Guest Editorial. Special Issue on Ambient-
Assisted Living: Sensors, Methods, and Applications.
IEEE Transactions on Human-Machine Systems. 45,
545–549 (2015).
Mundher, Z.A., Zhong, J.: A Real-Time Fall Detection
System in Elderly Care Using Mobile Robot and Kinect
Sensor. International Journal of Materials, Mechanics
and Manufacturing, 2, 133–138.
Mynatt, E.D., Essa, I., & Rogers, W. (2000). Increasing the
opportunities for aging in place. Proceedings of the
Conference on Universal Usability, 65–71.
Nomura, T., Kanda, T., Suzuki, T., & Kato, K. (2008).
Prediction of human behavior in human-robot
interaction using psychological scales for anxiety and
negative attitudes toward tobots. IEEE Transactions on
Robotics. 24, 442–45.
Nunnally, J., & Bernstein, I. (1994). Psychometric Theory
(3rd edition.) McGraw-Hill.
Petrie, H., & Darzentas, J.S. (2020). Digital Technology for
Older People: A Review of Recent Research. In:
Simeon Yates and Ronald E. Rice (ed.) The Oxford
Handbook of Digital Technology and Society. Oxfored
University Press.
Petrie, H., Darzentas, J.S., & Carmien, S. (2018). Intelligent
support technologies for older people: An analysis of
characteristics and roles. Proceedings of CWUAAT
2018: Breaking Down Barriers: Usability, Accessibility
and Inclusive Design. 89–99.
Rosales, P., Vega, A., De Marziani, C., Gallardo, J.I., Pires,
J., & Alcoleas, R.: (2017). Monitoring system for
elderly care with smartwatch and smartphone. XXIII
Congreso Argentino de Ciencias de la Computación
(La Plata, 2017). 1020–1029.
Samaddar, S., & Petrie, H. (2020). What Do Older People
Actually Want from Their Robots? In Miesenberger,
K., Manduchi, R., Covarrubias Rodriguez, M., &
Peňáz, P. (Eds.), Computers Helping People with
Special Needs (ICCHP 2020.) Lecture Notes in
Computer Science 2376. Springer.
Sinn, M., & Poupart, P. (2011) Smart walkers!: Enhancing
the mobility of the elderly. Proccedings of the 10th
International Conference on Autonomous Agents and
Multiagent Systems - Volume 3. pp. 1133–1134.
International Foundation for Autonomous Agents and
Multiagent Systems.
Smarr, C.A., Prakash, A., Beer, J.M., Mitzner, T.L., Kemp,
C.C., & Rogers, W.A. (2012). Older adults’ preferences
for and acceptance of robot assistance for everyday
living tasks. Proceedings of the Human Factors and
Ergonomics Society. 153–157.
United Nations (2019). World Population Ageing 2019.
New York: United Nations.
United Nations (2022). World population prospects 2022:
Summary of results. New York: United Nations.
DeVellis, R.F.: (2003). Scale development: theory and
applications (2
nd
Edition). Sage.
Wada, K., & Shibata, T. (2007). Robot therapy in a care
house - Change of relationship among the residents and
seal robot during a 2-month long study. Proceedings -
IEEE International Workshop on Robot and Human
Interactive Communication, 23, 107–112.
ICT4AWE 2024 - 10th International Conference on Information and Communication Technologies for Ageing Well and e-Health
118
