Parameter Adjustments in POMDP-Based Trajectory Planning for
Unsignalized Intersections
Adam Kollar
ˇ
c
´
ık
1,2 a
and Zden
ˇ
ek Hanz
´
alek
2 b
1
Dept. of Control Engineering, Faculty of Electrical Engineering, Czech Technical University in Prague, Czech Republic
2
Czech Institute of Informatics, Robotics and Cybernetics, Czech Technical University in Prague, Czech Republic
Keywords:
Automated Intersection Crossing, Trajectory Planning, POMDP.
Abstract:
This paper investigates the problem of trajectory planning for autonomous vehicles at unsignalized intersec-
tions, specifically focusing on scenarios where the vehicle lacks the right of way and yet must cross safely. To
address this issue, we have employed a method based on the Partially Observable Markov Decision Processes
(POMDPs) framework designed for planning under uncertainty. The method utilizes the Adaptive Belief Tree
(ABT) algorithm as an approximate solver for the POMDPs. We outline the POMDP formulation, beginning
with discretizing the intersection’s topology. Additionally, we present a dynamics model for the prediction of
the evolving states of vehicles, such as their position and velocity. Using an observation model, we also de-
scribe the connection of those states with the imperfect (noisy) available measurements. Our results confirmed
that the method is able to plan collision-free trajectories in a series of simulations utilizing real-world traffic
data from aerial footage of two distinct intersections. Furthermore, we studied the impact of parameter adjust-
ments of the ABT algorithm on the method’s performance. This provides guidance in determining reasonable
parameter settings, which is valuable for future method applications.
1 INTRODUCTION
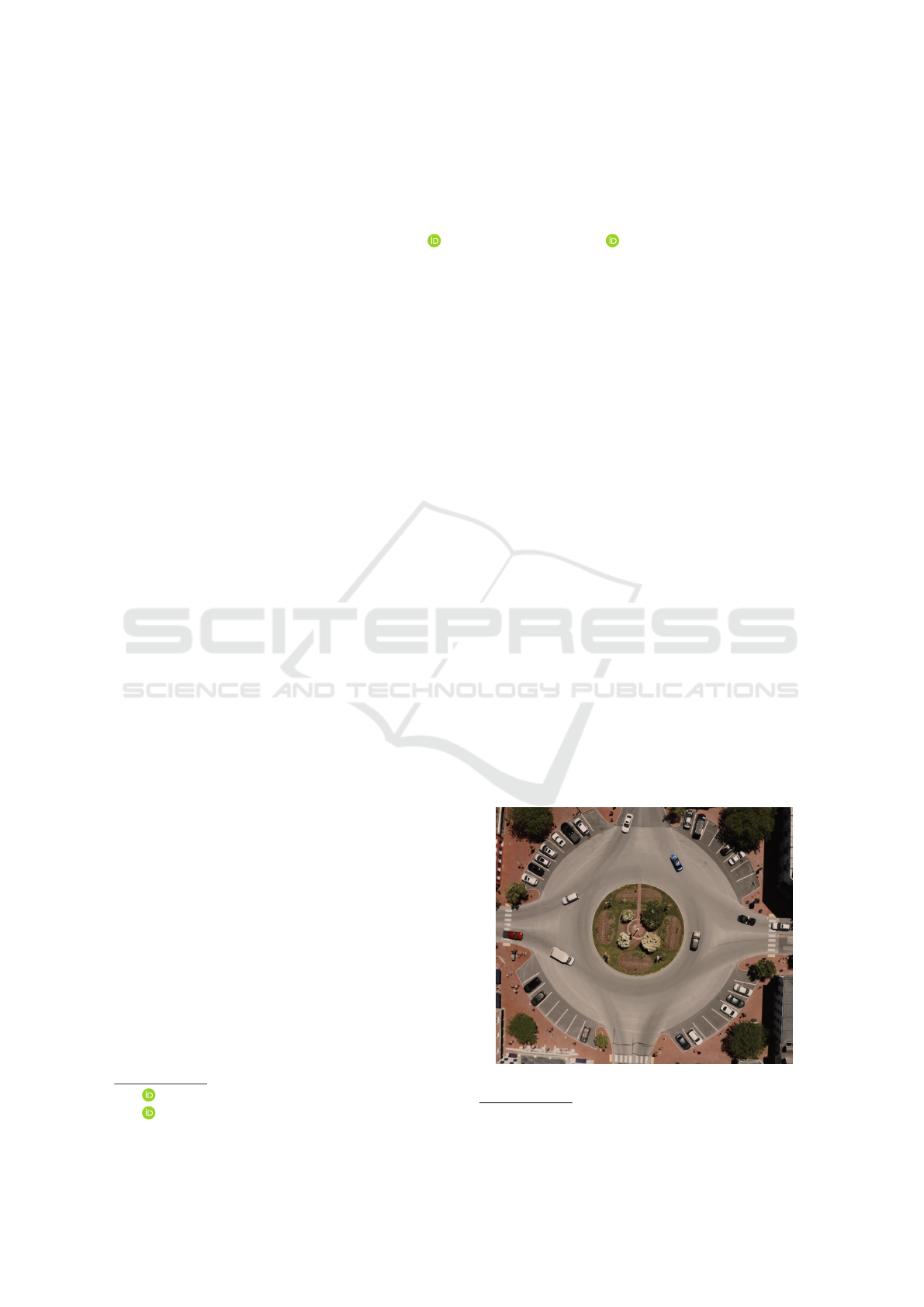
The advent of autonomous vehicles signals a change
in urban mobility, promising to enhance efficiency,
safety, and the overall driving experience. One of the
challenges these vehicles face is crossing an unsignal-
ized intersection, e.g., a roundabout shown in Fig-
ure 1. With the absence of traffic signals and espe-
cially without the right of way, the autonomous ve-
hicle must independently determine whether and how
to proceed, guided only by traffic regulations and the
inherently uncertain behavior of other vehicles, per-
ceived by measurements affected by noise. This is
the description of the trajectory planning problem for
unsignalized intersections we explore in this paper.
In particular, we investigate a method based
on Partially Observable Markov Decision Processes
(POMDPs), a framework for planning under uncer-
tainty with incomplete information. For a given inter-
section and 2D measurements of other vehicles, the
method outputs the trajectory as a sequence of accel-
erations along the desired path.
a
https://orcid.org/0000-0002-9150-839X
b
https://orcid.org/0000-0002-8135-1296
Our contributions are twofold. At first, we verify
the capability of the POMDP-based method to plan
collision-free trajectories in simulations using real-
life traffic data from aerial footage of two intersec-
tions with different topologies
1
. In addition, based on
those simulations, we analyze the influence of the pa-
rameter values on the method’s performance.
Figure 1: Unsignalized intersection (roundabout).
1
See our supplementary YouTube video.
522
Kollar
ˇ
cík, A. and Hanzálek, Z.
Parameter Adjustments in POMDP-Based Trajectory Planning for Unsignalized Intersections.
DOI: 10.5220/0012742400003702
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 10th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2024), pages 522-529
ISBN: 978-989-758-703-0; ISSN: 2184-495X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

2 RELATED WORK
The literature (Eskandarian et al., 2021; Hubmann
et al., 2018) broadly divides the planning strategies
for automated vehicles into rule-based, reactive, and
interactive methods, each with distinct approaches to
predicting future events.
The rule-based methods have a predefined set
of rules and actions established (Schwarting et al.,
2018), e.g., in the form of a finite state machine. Thus
their decisions rely only on the current state. The re-
active methods treat the motion of vehicles as inde-
pendent entities. They may introduce simplifying as-
sumptions such as the constant velocity of other ve-
hicles or their set future behavior (Hubmann et al.,
2018). Together with the rule-based methods, they
lack the ability to consider the interconnected behav-
ior of all vehicles, which is essential for safe interac-
tions in automated driving (Schwarting et al., 2018).
Interactive methods can be either centralized or
decentralized (Eskandarian et al., 2021). The cen-
tralized methods are usually based on the Vehicle-to-
Everything (V2X) paradigm (Tong et al., 2019) and
assume communication among vehicles to generate
a single global strategy. Nevertheless, given predic-
tions that only half of the vehicles will be autonomous
by 2060 (Litman, 2023), decentralized approaches
are vital for the foreseeable future. Decentralized
methods might be further categorized into three main
groups according to their way of tackling interactiv-
ity. Those are game theory-based, probabilistic, and
data-driven approaches (Schwarting et al., 2018).
This paper investigates a probabilistic planning
method developed for unsignalized intersection cross-
ing introduced in (Hubmann et al., 2018) based on
POMDPs. The method relies on the Adaptive Belief
Tree algorithm (Kurniawati and Yadav, 2016), using
a particle filter to estimate the probability distribu-
tion of non-observable variables, such as the inten-
tions of other vehicles. In (Bey et al., 2021), the
authors employed the method for driving at round-
abouts. In (Hubmann et al., 2019), occlusion caused
both by the environment and by other dynamic ob-
jects was included, and in (Schulz et al., 2019), an
improved behavior prediction with dynamic Bayesian
network was introduced.
3 APPROACH
This section outlines the components of our approach
to addressing the unsignalized intersection crossing
problem. We begin by providing a formal problem
definition in Section 3.1. Key to our strategy is for-
mulating this problem as a POMDP, which we dis-
cuss in Section 3.2. To solve the POMDP, we ap-
ply an approximate solver called the Adaptive Belief
Tree (ABT) algorithm, detailed in Section 3.3. Our
method involves discretizing the intersection topol-
ogy, a process explained in Section 3.4, where we
identify all feasible 2D paths without lane changes
based on combinations of intersection entrances and
exits. Subsequently, we introduce dynamical and ob-
servation models in Sections 3.5, and 3.6, respec-
tively, that capture the complexities of the real world
in a simplified yet sufficiently accurate manner for tra-
jectory planning. Entities such as state and observa-
tion are defined, and we construct a reward function
in Section 3.7. This function is designed to be max-
imized within the POMDP, ensuring that the result-
ing trajectory aligns with our expectations, e.g., en-
compasses crucial factors such as collision avoidance
and adherence to velocity limits. To complete the pro-
cess, we leverage the mentioned ABT solver for our
POMDP formulation to derive the desired trajectory
as a sequence of longitudinal accelerations along the
desired path toward the goal exit of the intersection.
3.1 Formal Problem Definition
To formally define the problem, we seek a collision-
free trajectory through a known intersection topology
along a predefined path φ
φ
φ(t) : t → R
2
, t ∈ [0, d] where
d is the total length of the path. We assume that
the position p
p
p
i
= [x
i
, y
i
]
⊤
, velocity v
v
v
i
= [v
x,i
, v
y,i
]
⊤
,
unit heading vector θ
θ
θ
i
i
i
, width w
i
, and length l
i
mea-
surements of all n relevant other (non-ego) vehicles
i ∈ {1, ...,n} are available every sample time k. Thus,
we are looking for a sequence of longitudinal accel-
erations a
k
0
of the ego vehicle (denoted with the zero
subscript), such that there is no overlap between the
bounding rectangles given by p
p
p
k
0
, θ
θ
θ
k
0
, w
0
, l
0
and p
p
p
k
i
,
θ
θ
θ
k
i
, w
i
, l
i
for each i. Lateral accelerations of all ve-
hicles need not to be directly determined, as the cur-
vature of the followed path implicitly controls it, pro-
vided that drifting is avoided.
3.2 POMDPs
POMDPs generalize the Markov Decision Process
(MDP) framework for decision-making and planning
under uncertainty (Kurniawati, 2022). They are de-
fined by a tuple
⟨
S,A,O,T,Z,R,γ
⟩
, where S is the set
of states, A is a set of actions, O is the set of obser-
vations, T is a set of conditional transition probabili-
ties between states, Z is a set of conditional observa-
tion probabilities, R : S ×A is the reward function, and
γ ∈ (0, 1] is the discount factor.
Parameter Adjustments in POMDP-Based Trajectory Planning for Unsignalized Intersections
523

Fundamentally, T represents the stochastic dy-
namics model of the system, and Z represents the
stochastic observation (measurement) model with the
probabilities T (s
′
|a,s) of transition from state s ∈ S to
state s
′
∈ S with action a ∈ A, and Z(o|a,s
′
) of obser-
vation o ∈ O in s
′
. The particular way of modeling the
dynamical and measurement properties for our pur-
poses is described Sections 3.5 and 3.6.
Since the current state is unknown, the belief
b ∈ B is introduced, representing a distribution over
all states from the set B known as the belief space:
b(s
′
) ∝ Z(o | a,s
′
)
∑
s∈S
T (s
′
| a, s)b(s), (1)
where ∝ denotes that the right-hand side probabil-
ities are not normalized. This converts the origi-
nal POMDP problem into an MDP where beliefs are
states, with continuous and observable state space B.
The goal of the POMDP planner is to determine a
policy π : B → A, that maximize the expected sum of
discounted rewards called the value function V :
V = E
"
∞
∑
k=0
γ
k
R(s
s
s
k
,a
k
)
b,π
#
. (2)
Even though the belief space is continuous, exact
POMDP solvers exist. They are based on the fact
that any optimal value function is piecewise linear and
convex and thus can be described as an upper enve-
lope of a finite set of linear functions called the α-
vectors (Braziunas, 2003). Nevertheless, exact meth-
ods are highly intractable and not suitable for on-
line applications (Kurniawati, 2022). Approximate
online methods mostly perform a belief tree search
combining heuristics, branch and bound pruning, and
Monte Carlo sampling (Ye et al., 2017). An example
of these approximate methods is the Adaptive Belief
Tree algorithm (ABT) implemented with its variants
in a publicly available solver called TAPIR (Klimenko
et al., 2014), which we use in our work.
3.3 Adaptive Belief Tree Algorithm
The ABT algorithm (Kurniawati and Yadav, 2016) is
an online and anytime POMDP solver that uses the
Augmented Belief Tree for finding well-performing
policies. The tree T is constructed by sampling ini-
tial belief b
0
with n
par
particles and propagating them
with actions according to the observation and dynam-
ics models T and Z until the set depth of the optimiza-
tion horizon N or a terminal state is reached. At each
step, the particles are assigned a reward r = R(s, a).
Sequences of quadruples (s
i
,a
i
,o
i
,r
i
) representing
a path in the tree where i is the depth of each contained
Figure 2: Illustrative example of an augmented belief tree.
node are sampled state trajectories also referred to as
episodes. At last, each episode is assigned a quadru-
ple (s
N
,−,−, r
N
) where s
N
is a sampled next state
and r
N
is the expected future reward for the follow-
ing states. This is computed directly for the terminal
states; non-terminal states are heuristically estimated,
in our case, with a 3-step lookahead. An example of
an Augmented Belief Tree is illustrated in Figure 2.
With the tree containing n
ep
episodes, the policy
based on a Q(b,a) (Q-value) estimate
ˆ
Q(b,a) for each
belief-action pair is obtained:
V (b,π) = max
a∈T (b)
ˆ
Q(b,a), (3)
π(b) = argmax
a∈T (b)
ˆ
Q(b,a), (4)
where Q(b,a) is the reward for performing an action a
in the first step and then behaving optimally. The esti-
mate is computed as an average reward of all episodes
h ∈ H(b,a) containing the pair (b,a) in depth l:
ˆ
Q(b,a) =
1
|H(b,a)|
∑
h∈H(b,a)
N
∑
i=l
γ
i−l
r
i
!
. (5)
After the action from π(b) is applied and new obser-
vation observed, a particle filter update according to
(1) is performed, and relevant parts of the tree T are
reused in the next step.
The estimation
ˆ
Q(b,a) is used not only for deter-
mining the policy π(b) but also during the construc-
tion of the tree T to select the actions for propagat-
ing particles. First, actions that have not been picked
already for the belief are chosen randomly with uni-
form distribution. When there are no unused actions
left, the upper confidence bound (UCB) is employed
to address the exploration-exploitation trade-off:
a
sel
= argmax
a∈A
ˆ
Q(b,a) + c
s
log
∑
a
|H(b,a)|
|H(b,a)|
!
, (6)
where c is the tunning UCB parameter.
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
524

The current belief is updated after the action π(b
0
)
is applied, and new measurements are obtained. The
corresponding branches of the belief tree are reused,
with the current belief being the new root of the tree.
This process is repeated until the goal is reached. If
needed, new particles are generated to maintain the
n
par
number of particles to avoid particle depletion.
3.4 Topology Discretization
To simplify the representation of the intersection
within the POMDP and to reduce computational de-
mands, we adopt an approach from (Hubmann et al.,
2018). The intersection is condensed into a set of all
possible paths, as illustrated in Figure 3. Particularly
effective for unsignalized intersections, where only a
few paths are reasonable to assume, this approach re-
duces the description of any vehicle to a triplet of val-
ues s
s
s
i
= [p
i
, v
i
, µ
i
]
⊤
, where µ ∈ {1, ..., m} is the in-
tended path out of the m possible paths, p is the posi-
tion along the path p, and v is the longitudinal veloc-
ity. The state of our POMDP is then represented by a
vector s
s
s containing these values for all n + 1 vehicles,
including the ego vehicle.
To identify possible paths, we utilize the lanelet2
(Poggenhans et al., 2018) map in the OSM XML for-
mat as a source for the full intersection topology. Us-
ing the lanelet2 library, we generate a route graph,
searching for all possible paths as a sequence of R
2
points. Subsequently, each path is stored as two sep-
arate cubic splines for the x and y coordinates. This
provides an efficient mapping from the path position
to the global coordinates, denoted as φ
φ
φ(p) : p → R
2
,
and mapping to the unit heading ψ
ψ
ψ(p) : p → y
y
y ∈ R
2
:
∥y
y
y∥ = 1. For the inverse mapping converting global
coordinates back to the position on a path, denoted as
ε(p
p
p) : p
p
p → R, we employ a search algorithm to deter-
mine the nearest point on the selected path.
3.5 Dynamics Model
As we proceed with the formulation of our POMDP, it
is crucial to introduce a dynamical model describing
how the state, defined in the previous section, evolves
over time. While various mathematical models of dif-
ferent complexities exist for vehicles, we aim for sim-
plicity and reduced computational demand. Thus, we
follow the approach from (Hubmann et al., 2018) and
adopt a discrete linear point mass model for each ve-
hicle i ∈ {0, ..., n}:
s
s
s
k+1
i
= A
A
As
s
s
k
i
+ B
B
Bu
k
i
(s
s
s) + η
η
η, η
η
η ∼ N (0
0
0,Q
Q
Q), (7)
A
A
A =
1 ∆t 0
0 1 0
0 0 1
, B
B
B =
1
2
∆t
2
∆t
0
. (8)
Here, ∆t represents the time between subsequent sam-
ples k and k + 1, and u(s
s
s) denotes the acceleration of
the vehicle. The Gaussian noise η
η
η with zero mean and
covariance matrix Q
Q
Q accounts for model inaccuracies.
The first two rows of the model matrices A
A
A, B
B
B rep-
resent the change of position p
i
and velocity v
i
in
time. Upon further inspection, it is also noticeable
from their last row that the intention µ
i
remains con-
stant. Yet, it is unknown for all vehicles except for the
ego. The same applies to acceleration values, which
need to be predicted to estimate the future movement
of the other vehicles.
In (Hubmann et al., 2018), the authors used a
heuristically chosen deceleration when a crash is
anticipated for other vehicles, otherwise, the ref-
erence velocity is followed. Alternatively, a dy-
namic Bayesian network prediction is presented in the
follow-up paper (Schulz et al., 2019). Another ap-
proach (Bey et al., 2021) introduces a version of the
intelligent driver model (IDM) (Treiber et al., 2000).
We implemented the IDM model for its simplicity:
u
k
i
= a
max
ρ
IDM
+ ω
1
, ω
1
∼ N (0,σ
ω
1
), (9)
where a
max
is the maximal acceleration, and ω
1
intro-
duces randomness into the model with variance σ
ω
1
.
The factor ρ
IDM
is given by the IDM:
ρ
IDM
= 1 −
v
k
i
v
des
δ
−
d
∗
(v
k
i
,v
lead
)
d
lead
2
, (10)
d
∗
(v
k
i
,v
lead
) = d
min
+ v
k
i
τ +
v
k
i
(v
k
i
− v
lead
)
2
p
a
max
|a
min
|
, (11)
where v
des
is the desired velocity, τ is the time head-
way, δ is the acceleration exponent, v
lead
is the veloc-
ity of the leading (approached) vehicle, and a
min
is the
minimal acceleration (maximal deceleration).
The acceleration of the ego vehicle is obtained
from the resulting POMDP policy according to (4).
The model (7), and (8) together with other vehicles
acceleration predictions (9) represent the dynamics
model referred to as T in Section 3.2.
3.6 Observation Model
Having established the dynamics model, our focus
shifts to the observation model, describing how the
observations are obtained from the state of the sys-
tem. In this context, observations should align with
measurements, encompassing variables such as posi-
tion, velocity, and orientation.
Let vector z
z
z
k
i
denote the observation of road user i
at time step k. These observations are acquired
Parameter Adjustments in POMDP-Based Trajectory Planning for Unsignalized Intersections
525
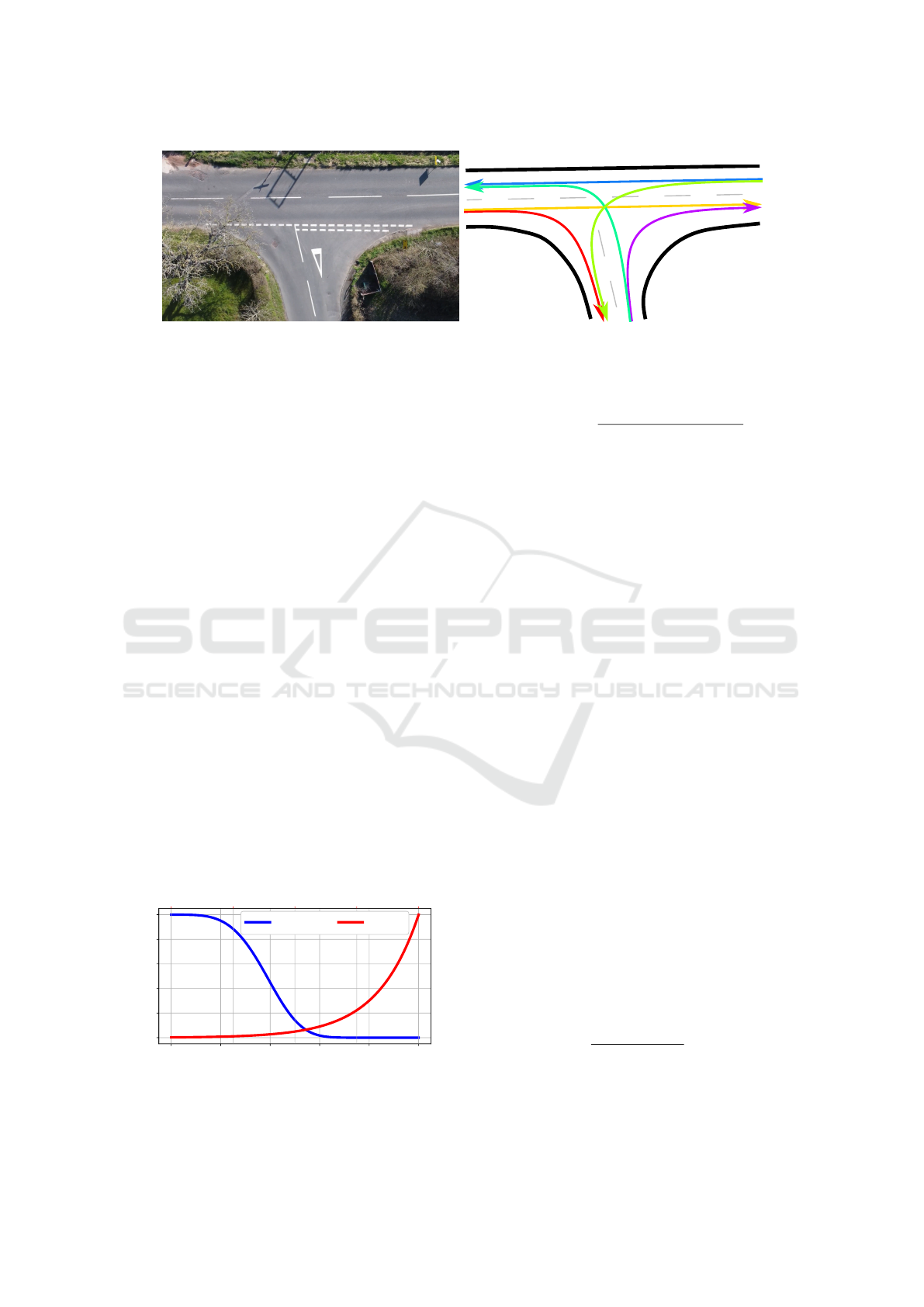
Figure 3: Visualisation of topology discretization – an intersection (left) with all possible simple paths (right).
through spline mappings, as detailed in Section 3.4:
z
z
z
k
i
=
φ
φ
φ
µ
k
i
(p
k
i
)
v
k
i
ψ
ψ
ψ
µ
k
i
(p
k
i
)
ψ
ψ
ψ
µ
k
i
(p
k
i
)
+ ζ
ζ
ζ, ζ
ζ
ζ ∼ N (0
0
0,R
R
R), (12)
where µ
k
i
signifies the specific path for the mappings,
and ζ
ζ
ζ represents Gaussian observation noise with zero
mean and covariance matrix R
R
R.
For particle generation within the particle filter,
the estimation of the intended path µ
k
i
from global
measurements is essential. As the inverse mapping
ε has already been defined, the focus is on estimating
the intended path µ
k
i
. However, this might not be de-
termined uniquely due to potential path overlaps or
shared segments, making paths indistinguishable in
certain instances. Consequently, a probability distri-
bution is employed to assess the likelihood of each
path intention. This involves combining the likeli-
hoods f
1
and f
2
of two features shown in Figure 4:
f
1
(i,µ) = e
(
−0.05D
k
i
(µ)
4
+1)
)
, (13)
f
2
(i,µ) = e
(
3(α
k
i
(µ)−1)
)
. (14)
The features are the distance from the closest point
projection D
k
i
(µ) = ∥p
p
p
k
i
− φ
φ
φ
µ
(ε
µ
(p
p
p
k
i
))∥, and a dot
product α
k
i
(µ) = θ
θ
θ
k
i
· ψ
ψ
ψ
µ
(ε
µ
(p
p
p
k
i
)) of the path heading
and measured heading of a vehicle.
0 1 2 3 4 5
D
k
i
(m)
0.0
0.2
0.4
0.6
0.8
1.0
likelihood (-)
−1.0 −0.5
0.0 0.5 1.0
α
k
i
(−)
f
1
(D
k
i
) f
2
(α
k
i
)
Figure 4: Likelihood functions of features.
The combination of these likelihoods results in the
distribution over all path intentions µ:
P(i,µ) =
q(µ) f
1
(i,µ) f
2
(i,µ)
∑
m
j=1
q( j) f
1
(i, j) f
2
(i, j)
, (15)
where q(µ) is the overlap coefficient, adjusting
the probabilities for situations involving overlapping
paths, as commonly encountered in roundabouts.
3.7 Reward Function
The reward function is a crucial component that de-
fines the behavior of the ego vehicle within the in-
tersection. It is responsible for aligning the vehicle’s
actions with our desired objectives: efficient naviga-
tion through the intersection while prioritizing safety,
avoiding excessive acceleration, and preventing colli-
sions. This multi-goal task is formulated as
r
k
= r
vel
(s
s
s
k
0
) + r
acc
(a
k
0
) + r
crash
(s
s
s
k
). (16)
The reward at each time step, denoted as r
k
, is com-
posed of three fundamental terms: r
vel
representing
velocity, r
acc
for acceleration, and r
crash
pertaining to
collision avoidance.
The velocity reward encourages the ego vehicle to
maintain an appropriate speed throughout its trajec-
tory. It is determined based on the deviation from the
reference velocity ∆v = v
des
− v
k
0
:
r
vel
(v
k
0
) =
(
−R
vel
∆v if ∆v ≥ 1 ,
−R
vel
∆v
2
otherwise,
(17)
where R
vel
is a positive weight. The desired veloc-
ity v
des
is influenced by factors such as the curvature
κ
µ
(p
k
0
) at the vehicle’s position p
k
0
along its intended
path µ
k
0
. The desired velocity is determined as:
v
des
= min (v
curve
,v
lim
), (18)
where v
curve
=
q
a
lat,max
/κ
µ
(p
k
0
) is the velocity lim-
ited by the maximal acceptable lateral acceleration
a
lat,max
,max, and v
lim
maximal velocity limit of the
intersection.
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
526
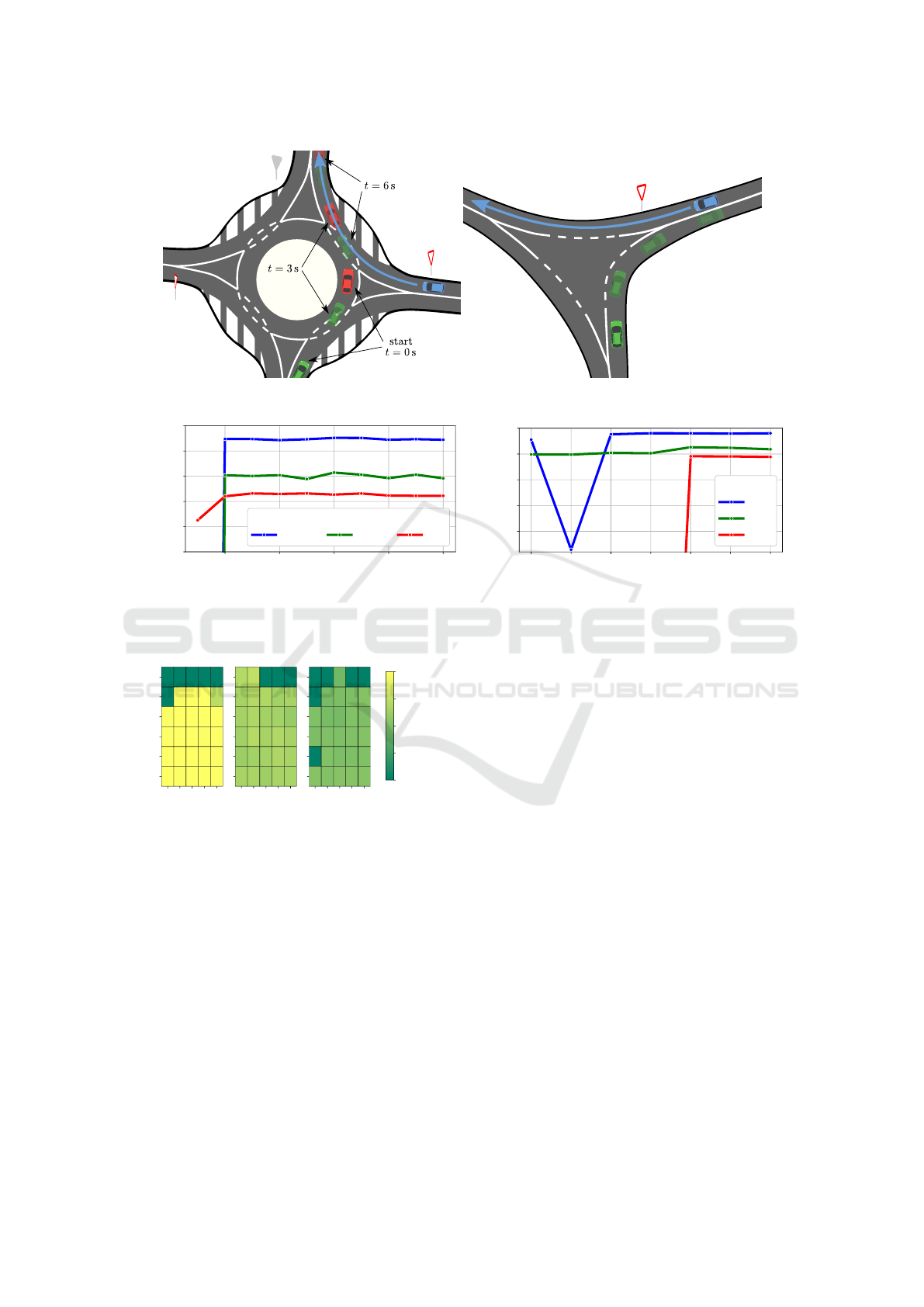
Figure 5: Simulation scenarios – roundabout (left), threeway junction (right). The ego car is represented with a blue color.
2 4 6 8 10
optimization horizon N (-)
−4000
−3800
−3600
−3400
−3200
−3000
mean nor m. reward (-)
∆t (s)
0.25 0.5 1.0
1 10 100 1000 10000 100000 1000000
UCB coefficient c (-)
−5000
−4500
−4000
−3500
−3000
mean nor m. reward (-)
∆t (s)
0.25
0.5
1.0
Figure 6: Roundabout rewards – varying optimization horizon N (left), and varying UCB coefficient c (right).
10
100
500
1000
2000
100
500
1000
2000
5000
10000
n
ep
(-)
∆t = 0.25 s
10
100
500
1000
2000
n
par
(-)
∆t = 0.5 s
10
100
500
1000
2000
∆t = 1.0 s
−4000
−3775
−3550
−3325
−3100
mean normalized reward (-)
Figure 7: Roundabout rewards for varying n
par
and n
ep
.
An acceleration penalty is imposed to prevent
abrupt changes in velocity, thus increasing driving
comfort. It is computed using a quadratic penalty
function, weighted by R
acc
≥ 0:
r
acc
(a
k
0
) = −R
acc
a
k
0
2
. (19)
The collision avoidance component is designed to
prevent crashes. It assigns a negative reward −R
crash
when a collision is detected and 0 otherwise:
r
crash
(s
s
s
k
) =
(
−R
crash
if ego crashed,
0 otherwise.
(20)
Collision detection relies on the overlap of bounding
rectangles of vehicles, as explained in Section 3.1.
4 RESULTS
In this section, we test the investigated method’s
collision-free planning capabilities and the impact of
parameter adjustments on the planning algorithm’s ef-
fectiveness. For these proposes, we ran simulations
based on data collected from aerial observations of
two specific intersections as shown in Figure 5. In
the simulations, building upon the results of (Ma
ˇ
nour,
2021), we replaced a yielding vehicle with our ego
vehicle to mimic real-life situations. Even though the
use of such offline data does not include direct reac-
tions of other vehicles to the ego vehicle, we deem
it appropriate for testing situations where the ego is
expected to yield and adequately respond to the be-
havior of others. Also, our simulations assume that
the ego vehicle adheres to the point mass model (7).
We focus on the Adaptive Belief Tree (ABT) al-
gorithm’s parameters: the optimization horizon N, the
number of particles n
par
, the number of episodes n
ep
,
and the Upper Confidence Bound (UCB) parameter
c influencing the exploration-exploitation trade-off.
These parameters are crucial to the ABT algorithm,
and their individual impacts on the performance are
not immediately apparent. The default values of all
parameters used in our simulations are provided in
Parameter Adjustments in POMDP-Based Trajectory Planning for Unsignalized Intersections
527
2 4 6 8 10
optimization horizon N (-)
−1200
−1100
−1000
−900
−800
−700
−600
−500
−400
−300
mean norm. reward (-)
∆t ( s)
0.25 0.5 1.0
1 10 100 1000 10000 100000 1000000
UCB coefficient c (-)
−1200
−1100
−1000
−900
−800
−700
−600
−500
−400
−300
mean norm. reward (-)
∆t (s)
0.25 0.5 1.0
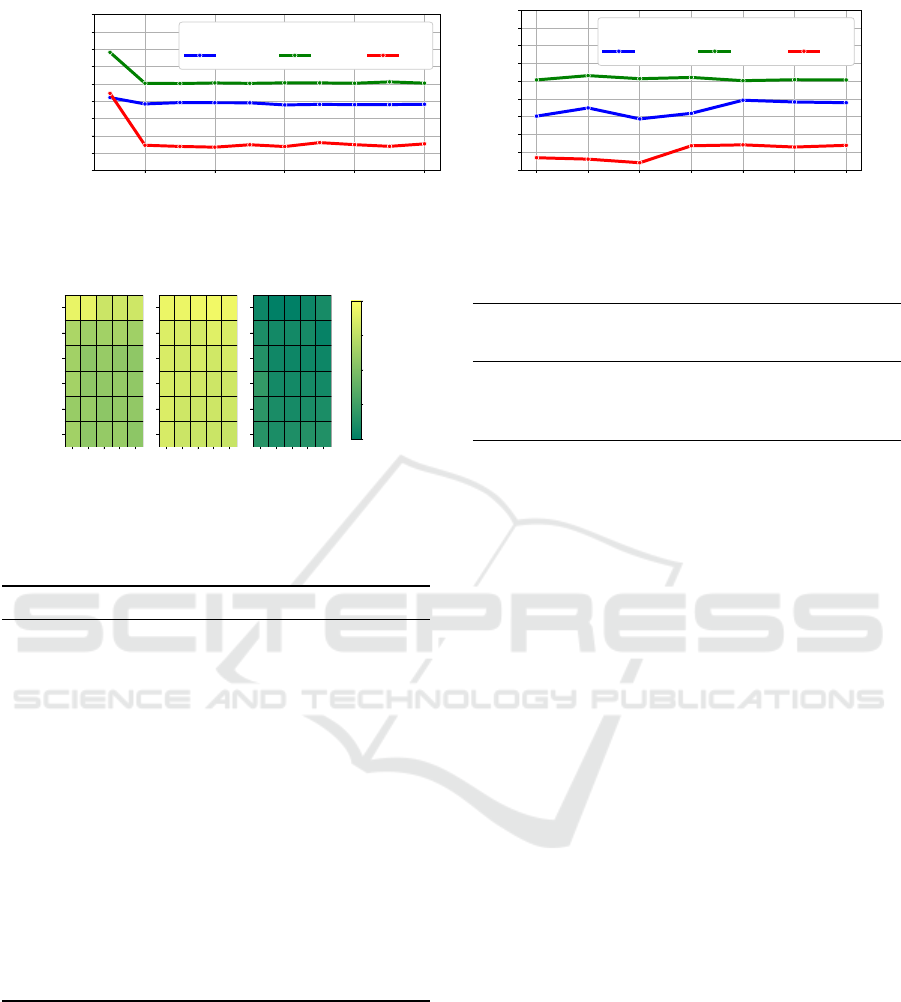
Figure 8: Threeway rewards – varying optimization horizon N (left), and varying UCB coefficient c (right).
10
100
500
1000
2000
100
500
1000
2000
5000
10000
n
ep
(-)
∆t = 0.25 s
10
100
500
1000
2000
n
par
(-)
∆t = 0.5 s
10
100
500
1000
2000
∆t = 1.0 s
−1100
−975
−850
−725
−600
mean normalized re ward (-)
Figure 9: Threeway rewards for varying n
par
and n
ep
.
Table 1: Default parameter values.
Description Value
A action set
{
−2,−1,0, 1
}
ms
−2
c UCB parameter 20000
N opt. horizon 5
n
ep
num. of episodes 3000
n
par
num. of particles 300
γ discount fact. 1
Q
Q
Q dyn. covariance 0
0
0
R
R
R obs. covariance diag(10
−2
,10
−2
,0)
σ
ω
1
IDM st. dev. 1 m s
−2
τ time headway 2 s
δ acc. exponent 4
d
min
IDM min. dist. 1 m
R
acc
acc. reward coef. 1
R
vel
vel. reward coef. 100
R
crash
crash reward 10000
a
lat,max
max. lat. acc. 0.5 ms
−2
Table 1. We obtained those values by tuning or by
following the works they were used in.
For each scenario, we tested every parameter com-
bination in 50 simulations, employing three different
time step lengths ∆t. The chosen parameter settings
significantly influence the simulation runtime, except
for the UCB factor c, which does not alter the runtime.
To provide a clearer perspective on how these settings
impact the simulation duration, Table 2 presents a
comparison of roundabout scenario runtime estimates
Table 2: Runtime estimate with realtime percentages.
∆t (s)
Runtime (s)
default settings
Runtime (s)
n
ep
= 10
4
, n
par
= 2 · 10
3
1 6 (75%) 14 (175%)
0.5 10 (125%) 42 (525%)
0.25 24 (300%) 118 (2350%)
for two distinct parameter configurations alongside
their corresponding real-time percentages. Our simu-
lation software was implemented in C++, utilizing the
TAPIR toolbox together with ROS 1, and we ran the
simulations on a laptop with an Intel i5-11500H CPU.
4.1 Roundabout Scenario
The first scenario involves the ego vehicle approach-
ing a roundabout at 8 m s
−1
, interacting with two ve-
hicles, as seen in the left image of Figure 5. This sce-
nario tests the ability to yield and avoid crashes.
The results, depicted in Figures 6 and 7, show
the mean of normalized reward ∆t
∑
i
r
i
achieved for
various settings. Settings without crashes had val-
ues between −3200 and −3600. Mean reward be-
low −4000 represents occurring crashes. The reward
is also based on ∆t, as the smaller the time step, the
higher the reward because the planning algorithm has
more samples to react.
Our key findings include identifying parameter
threshold values, where their further changes have
minimal impact on performance yet significantly in-
crease computation time. The threshold for N is 2;
since for N = 1, vehicles frequently crash at sample
times ∆t ≤ 0.5 s. For c, the threshold appears to be
10000, with regular crashes occurring at lower val-
ues, mainly for ∆t = 1 s. Crashes also happened com-
monly for n
par
≤ 100 and for n
ep
≤ 500.
4.2 Threeway Junction Scenario
In the second scenario, the ego vehicle approaches a
three-way junction at 8 m s
−1
, while another vehicle
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
528

with the right of way also approaches the intersection
as depicted in the right image of Figure 5. There is no
danger of crashing because the other vehicle turns in a
non-collision direction, yet this is an unknown behav-
ior initially. This scenario examines the ego vehicle’s
information-gathering capability.
Note that the reward here does not indicate the to-
tal quality of the solution; rather, it says how well the
vehicle follows the reference velocity. Slowing down
information gathering is reflected as a lower reward.
This is reflected in our results shown in Figures 8,
and 9, where parameter combinations of N, n
par
, and
n
ep
that caused crashes in the roundabout scenario
yield higher rewards as they ignore the possible dan-
ger of crashing. The reference velocity is not fol-
lowed properly for the c values below the threshold,
making the rewards lower, especially for ∆t = 1 s,
and ∆t = 0.5 s. Also, the rewards for ∆t = 0.25 s
are generally lower than for ∆t = 0.5 s, indicating
that the cost of delaying a decision when more sam-
ples are available is lower relative to the total re-
ward. This behavior might be fine-tuned by param-
eters R
acc
, R
crash
and R
vel
.
5 CONCLUSION
In this paper, we successfully verified the planning
capabilities of the investigated trajectory planning
POMDP-based method for unsignalized intersection
crossing. We executed a series of simulations based
on real-life data from aerial recordings of two distinct
intersections. The method proved capable of handling
the uncertain aspects of the problem, such as the un-
known intention of other vehicles.
Additionally, we investigated the influence of pa-
rameter adjustment on the method’s performance.
Our results indicate that there are certain well-
performing threshold values. Exceeding them yields
little to no gains and increased computation time.
This finding is beneficial with regard to the future ap-
plication of this method and its derivations.
ACKNOWLEDGEMENTS
This work was co-funded by the European
Union under the project ROBOPROX (reg. no.
CZ.02.01.0100/22 0080004590) and by the Technol-
ogy Agency of the Czech Republic under the project
Certicar CK03000033.
REFERENCES
Bey, H., Sackmann, M., Lange, A., and Thielecke, J.
(2021). POMDP Planning at Roundabouts. In 2021
IEEE IV Workshops, pages 264–271.
Braziunas, D. (2003). POMDP solution methods.
Eskandarian, A., Wu, C., and Sun, C. (2021). Research Ad-
vances and Challenges of Autonomous and Connected
Ground Vehicles. IEEE Transactions on Intelligent
Transportation Systems, 22(2):683–711.
Hubmann, C., Quetschlich, N., Schulz, J., Bernhard, J., Al-
thoff, D., and Stiller, C. (2019). A POMDP Maneuver
Planner For Occlusions in Urban Scenarios. In 2019
IEEE IV, pages 2172–2179.
Hubmann, C., Schulz, J., Becker, M., Althoff, D., and
Stiller, C. (2018). Automated Driving in Uncertain
Environments: Planning With Interaction and Uncer-
tain Maneuver Prediction. IEEE Transactions on In-
telligent Vehicles, 3(1):5–17.
Klimenko, D., Song, J., and Kurniawati, H. (2014). TAPIR:
A software toolkit for approximating and adapting
POMDP solutions online. In IEEE ICRA.
Kurniawati, H. (2022). Partially Observable Markov Deci-
sion Processes and Robotics. Annual Review of Con-
trol, Robotics, and Autonomous Systems, 5(1):253–
277.
Kurniawati, H. and Yadav, V. (2016). An Online POMDP
Solver for Uncertainty Planning in Dynamic Environ-
ment. In Inaba, M. and Corke, P., editors, Robotics
Research: The 16th International Symposium ISRR,
Springer Tracts in Advanced Robotics, pages 611–
629. Springer International Publishing, Cham.
Litman, T. (2023). Autonomous Vehicle Implementation
Predictions: Implications for Transport Planning.
Ma
ˇ
nour,
ˇ
S. (2021). Simulation environment for testing of
planning algorithms. Master’s thesis, CTU in Prague.
Poggenhans, F., Pauls, J.-H., Janosovits, J., Orf, S., Nau-
mann, M., Kuhnt, F., and Mayr, M. (2018). Lanelet2:
A high-definition map framework for the future of au-
tomated driving. In 2018 IEEE ITSC, pages 1672–
1679.
Schulz, J., Hubmann, C., Morin, N., L
¨
ochner, J., and
Burschka, D. (2019). Learning Interaction-Aware
Probabilistic Driver Behavior Models from Urban
Scenarios. In 2019 IEEE IV, pages 1326–1333.
Schwarting, W., Alonso-Mora, J., and Rus, D. (2018). Plan-
ning and Decision-Making for Autonomous Vehicles.
Annual Review of Control, Robotics, and Autonomous
Systems, 1(1):187–210.
Tong, W., Hussain, A., Bo, W. X., and Maharjan, S. (2019).
Artificial Intelligence for Vehicle-to-Everything: A
Survey. IEEE Access, 7:10823–10843.
Treiber, M., Hennecke, A., and Helbing, D. (2000).
Congested traffic states in empirical observations
and microscopic simulations. Physical Review E,
62(2):1805–1824.
Ye, N., Somani, A., Hsu, D., and Lee, W. S. (2017).
DESPOT: Online POMDP Planning with Regular-
ization. Journal of Artificial Intelligence Research,
58:231–266.
Parameter Adjustments in POMDP-Based Trajectory Planning for Unsignalized Intersections
529
