
A Digital Twin based Approach to Structural Mechanics: New
Perspectives for Robotics in Forestry and Beyond
Dorit Kaufmann, Tobias Osterloh and Jürgen Rossmann
Institute for Man-Machine Interaction at RWTH Aachen University, Ahornstrasse 55, 52074 Aachen, Germany
Keywords: Finite Element Analysis (FEA), Digital Twin (DT), Holistic Simulation Framework.
Abstract: Computational simulations are nowadays crucial for the development of any complex mechatronic system.
This holds especially true when it comes to robots acting in a highly dynamic environment, such as robots
used as mobile machinery in forestry. The ever changing loads acting on these robots result from different
weather conditions, ground stability, leverage forces of falling trees during cutting etc. Thus, the structural
layout of the robot is rather sophisticated. Nevertheless, it is usually done once in the beginning of the design
process and the dynamic loads can only be estimated, leading to huge safety margins. Regarding the ecological
consequences every operation in forestry involves, it is of uttermost importance not only to do a neat structural
design, but also to computationally analyse the mobile machinery directly in its actual environment. This
work proposes a Digital Twin (DT) based approach to structural mechanics. Every feature of the environment
(every tree, the soil etc.) as well as the robot itself can be represented by a DT. An existing Rigid Body
Dynamics (RBD) is used to record all acting forces and momentums during an operation. They serve as input
for a Finite Element Analysis (FEA) thus enabling a holistic simulation framework.
1 INTRODUCTION
Forestry is an important branch of economics for
many countries such as Canada, US, Germany, the
Baltic and the Scandinavian countries. While the
requirements for improvements in mobile machinery
for timber harvesting are the same as for any other
robot regarding mechanics, electrics, communication
etc., there is one further aspect that needs to be
considered and which is of utmost importance: the
direct impact on the environment of every work step.
Interesting challenges arise in the mechanical
layout of mobile machinery for forestry, as it interacts
with an ever-changing and sometimes even “hostile”
environment, and – even more important – the
ecological consequences of this interaction have to be
considered and optimized to sustain a strong, healthy
forest for future generations.
While the planning of e.g. thinning strategies and
the manual hand-on work is usually done by
experienced forest workers who take ecological
consequences into account, powerful tools are
required to create concrete guidelines further
automation can follow to determine specific actions.
Thus, using computational simulation is inevitable
for improvements in forestry. Nowadays, there are
many sophisticated and tested tools to consider both
ecological and economical aspects in forestry, some
of them even creating a whole “Virtual Forest”.
The design of mobile machinery for forestry (such
as harvesters, forwarders etc.) highly benefits from
these simulation frameworks, since it reduces
otherwise tremendous prototyping costs of any such
complex robot with relatively small number of units.
Despite the continuous progress in simulation
technology, it remains difficult to optimize the
robotic layout, as the estimation of dynamic loads is
challenging due to e.g. different soil conditions and
high leveraging forces of falling trees. Thus, the
structural design of the robot is usually still carried
out with forces that are assumed to occur during the
application and hence have accordingly huge safety
margins, leading to unnecessary large weight or
limitation in the applications.
This work presents a Digital Twin (DT) based
approach to structural mechanics, where structural
simulations are performed directly after a work step
is executed in the Virtual Forest, where all
environmental aspects and different application
scenarios may be taken into account. During this
process, Rigid Body Dynamics (RBD) calculates the
actual dynamic loads serving as an input for a Finite
274
Kaufmann, D., Osterloh, T. and Rossmann, J.
A Digital Twin based Approach to Structural Mechanics: New Perspectives for Robotics in Forestry and Beyond.
DOI: 10.5220/0012755500003758
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2024), pages 274-280
ISBN: 978-989-758-708-5; ISSN: 2184-2841
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

Element Analysis (FEA). Following this approach,
DTs become the crystallization point in the design
and engineering process.
To test this concept, an exemplary application
scenario of a harvester cutting a tree was examined
(see Fig. 1).
2 RELATED WORK
The need for simulation in forestry was recognized
many years ago. The improvements in mobile
machinery for forestry and the awareness for
environmental consequences following their usage
grew simultaneously, leading to new thinning and
reforestation strategies (Rautio et al, 2023). Thus,
there are nowadays powerful computational tools to
describe forestry processes. The Virtual Forest is one
of these concepts. It combines aerial survey
technologies, aspects of Virtual Reality and robotics
to simulate an actual existing forest and the ongoing
forestry in all its facets (Rossmann et al, 2009).
Some authors focus on quantifying the economic
and ecological consequences of certain forestry
operations with mobile machinery (Losch et al,
2017), but a lot of research is done to improve the
mobile machinery itself. In (Cheng et al, 2023) a
more general point of view on agricultural robots is
presented, while in (Visser et al, 2021) especially
automation for harvesting operations is considered,
stating that the software requirements for an
autonomous felling robot are still in their infancies.
The approach developed in the presented work
uses DTs. DTs are seen as a core feature of Industry
4.0, but the general concept has expanded to nearly
all engineering applications. The authors of (Negri et
al, 2017) give an overview of several different
definitions of DTs. The way of defining and using
them in this work is similar as described in (Atorf et
al, 2018), where DTs represent their real twins and
“are brought to life” by multi-domain 3D simulation
systems.
The interaction of RBD and FEA becomes more
and more important with decreasing safety margins
and complex robots working in highly dynamic
environments (e.g. man-machine interaction). Thus
there is a wide range of views on this subject: either
rather theoretical ones, that deal with the mathematics
of coupling (Busch, 2012) and ways of combining the
different underlying models (Kaufmann et al, 2018)
or approaches being developed for one single
application, as “classical” robotics (Chung et al,
2010) or automotive engineering (Dietz et al, 2001).
3 KEY METHODS
In order to perform structural design for robots used
as mobile machinery in forestry, the two principles of
RBD and FEA need to be captured by the DT. Both
form the mathematical and computer scientific base
for this work and thus will be briefly explained in the
following section.
3.1
Structural
Simulations via Finite
Element Analysis (FEA)
FEA is a validated and sophisticated method for
structural mechanics, described in many textbooks,
e.g. (Bathe, 1996). External influences serve as input
variables (forces, temperature, etc.) in order to
calculate the behaviour of the structure
(deformations, stresses, temperature distributions,
etc.) as output variables. The material and the shape
of the examined structure set the relation between
both.
First, the structure is meshed and hence
mathematically discretized, i.e. divided into m
individual elements. Nodes connect these elements.
During the so-called preprocessing, boundary
conditions (BCs) are defined in the form of loads and
supports. The next step of solving describes the
solution of the mathematical problem, which can be
simplified as follows:
𝒌
𝟏
⋱
0
0
𝒌
𝒎
⋅
𝒖
𝟏
⋮
𝒖
𝒎
𝒇
𝟏
⋮
𝒇
𝒎
≡𝒌⋅𝒖
𝒇
(1)
Here, u
describes the displacement of the
elemental nodes of element i, 𝒇
𝒊
is the corresponding
acting force and the matrix entries 𝒌
𝒊
reflect material-
Figure 1: Real-life application scenario for the developed
concept and implementation: A harvester is cutting a tree.
The DT of the mobile machinery builds the base fo
r
enhanced structural mechanics.
A Digital Twin based Approach to Structural Mechanics: New Perspectives for Robotics in Forestry and Beyond
275

specific elastic moduli. In descriptive terms, during
the solution, all external acting forces must be
translated into deformations, while the nodes couple
neighbouring elements to move accordingly. Thus, a
system of coupled differential equations is created,
which in general cannot be solved analytically. The
crucial parameters for numerical solving have also
been specified during the preprocessing (required
accuracies of the solution, termination criteria, etc.).
Depending on the complexity of the model and the
computing power used, the calculation of the solution
requires a few seconds up to several weeks.
Afterwards, the results can be visualized and
analysed in the subsequent postprocessing.
3.2 Rigid Body Dynamics (RBD)
The simulation of RBD is a well-established tool for
the development and analysis of mechanical systems.
Depending on the use case, several approaches like
the Composite-Rigid-Body Algorithm (generalized
coordinates) (Featherstone, 2012) and the 𝐽𝑀𝐽𝑇
approach (maximal coordinates) (Baraff, 1996) are
applied. RBD aims for a macroscopic simulation of
the system, replicating the kinematic and dynamic
properties of the system. In addition, several
extensions to RBD exist, allowing for a simulation of
deformable objects and compliant mechanisms
(Bender et al, 2014). The approaches are capable of
visually replicating structural deformations but are
not yet sufficient for the realization of high-fidelity
DTs, since the fundamental models are just
simplifications of the structural properties of the
bodies and do not provide the required level of detail.
The envisaged coupling of RBD with detailed
FEA poses some requirements on the pursued RBD
simulation approach. The RBD simulation must
allow for detailed introspection capabilities in order
to capture the bearing forces within the system, which
will then be passed to the FEA simulation.
Additionally, the implicit interaction of a DT with its
environment must be possible, setting this DT-based
approach apart from other simulation approaches like
Modelica or Simscape. (Both only allow to describe
the explicit interaction – e.g. joints – between bodies.
Collisions have to be modelled explicitly, which is
not feasible for DTs interacting with complex
environments.)
Consequently, we build upon a rigid body
simulation in maximal coordinates, following the
𝐽𝑀𝐽𝑇 approach. The kinematic constraints are
described by position-based constraints C and are
implemented by the constraint Jacobian 𝐽= 𝜕𝐶/𝜕𝑥 ,
forcing the relative velocity of two connected rigid
bodies at the joint position to zero, see (2).
𝐽
⋅𝑥=0
(2)
This way, complex systems can be described
easily. For each joint within the system, additional
lines are added to the Jacobi matrix J. Based on the
kinematic constraints captured by the Jacobi matrix 𝐽,
the constraint forces λcan be calculated by an
impulse-based approach (Stewart et al, 2000), see (3).
JM
-
J
⋅dt ⋅
λ
+
J ⋅ [x+ M
-
⋅ dt ⋅
f
]=b
(3)
The mass matrix is described by 𝑀, the external
forces (e.g. gravitation) are described by 𝑓
and
finally the vector 𝑏 is used for stabilization purposes
(Baumgarte, 1972).
The interactions of the DT with its environment
(i.e. contact forces and friction) are realized based on
complementarity constraints, resulting in a Linear
Complementarity Problem (LCP) (Anitescu et al,
1997). Therefore, a slack variable 𝑎 is introduced to
the right side of (3), allowing to formulate the
complementarity condition (4).
𝑎≥0 , 𝜆
≥0 , 𝑎⋅𝜆
=0
(4)
Either two colliding bodies are separating (𝑎>0)
and no contact force needs to be applied
(𝜆
= 0), or a contact exists (𝑎=0) and a
contact force prevents penetration of both colliding
rigid bodies
(
𝜆
>0
)
.
The final building block in the RBD tool chain is
the handling of kinematic loops. Kinematic loops
introduce redundant constraints to the simulation,
resulting in a reduced row rank of the Jacobi matrix
𝐽. Consequently, the system matrix 𝐴= 𝐽𝑀
𝐽
becomes singular and (3) will not have a unique
solution for the constraint forces 𝜆. In order to cope
with such singular systems and achieve an
unambiguous solution for the constraint forces 𝜆, a
Constraint Force Mixing based regularization of the
system matrix 𝐴 is performed (Smith, 2019).
Subsequently, a small amount of compliance is
introduced to the simulated system that can be
controlled by the magnitude of the regularization
parameter, resulting in an efficient calculation of the
inverse dynamics problem.
Once the constraint forces 𝜆 are calculated, the
forward dynamics can be solved.
M ⋅x
=
f
+J
⋅
λ
(5)
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
276
Applying this simulation approach allows to
efficiently analyse the dynamic loads occurring when
a DT interacts with its environment. The
introspection to the bearing loads is given by default
and thus allows to effortlessly generate the required
inputs for a detailed FEA of arbitrary structures
within the DT.
4 CONCEPT: ENABLING A
HOLISTIC SIMULATION
FRAMEWORK
Every single operation in forestry (such as cutting a
tree, reforestation, etc.) is subject to a forestry plan.
In this way it is ensured, that both economic and
ecological aspects are taken into account. The
different work steps are favourably done with mobile
machinery, whose structural design has been defined
with the help of FEA (see left side of Fig. 2). Today,
there are sophisticated simulation methods to
examine the outcome an operation will have and thus
to estimate its economic and ecologic consequences.
As both the robot itself and the environment are rather
complex and highly interact with each other, there are
many different aspects to consider. Thus, all of them
and their connections should be represented virtually,
creating a whole “Virtual Forest” (Rossmann et al,
2009). Every part of the system gets a DT. This holds
true for e.g. every tree, the ground, stones, the forestry
workers, and of course the mobile machinery. With
this, one can answer specific questions (e.g. “Is it
possible to cut this tree if the harvester is in this
position?”) and develop whole forestry strategies
(e.g. “If we want our forest to have this structure and
tree assortment in X years, what do we need to do
now?”).
Nevertheless, this already very elaborated picture
is still missing a direct link to the structural design of
the deployed robots. In general, the structural layout
of a robot is created with the help of FEA. The forces
and torques required to perform a structural analysis
are usually estimated or based on real life experience
of other structures. But the loads in a forest are highly
dynamic, due to weather conditions, leverage effects
of falling trees, ground stability etc. The ultimate
value for structural design is the safety for the present
forestry workers and the durability of the robot.
Thus, a neglect of structural analyses for an
individual operation leads to omission of possibilities
on the one hand (“this tree could have been cut, as the
estimated leverage effect was to high due to its actual
shape of the treetop”) or a to high ecological impact
on the other hand (“the used mobile machinery could
have been way lighter, thus the soil is unnecessarily
compressed”).
In this work, a concept was developed to do a
more flexible and neater structural design, as RBD is
performed for the DT of the mobile machinery and
the recorded loads serve as input for a FEA. Thus, a
holistic simulation framework is enabled.
As the actual dynamic loads are considered, this
builds a solid foundation for optimizations (of the
robot and work processes) and finally even
automation, as specific instructions for every
situation can be defined from the holistic simulation
framework (see right side of Fig. 2).
Please note, that the general concept also holds
true for completely different fields of application,
where complex robots encounter highly dynamic
environments (such as robots collaborating with
humans or space robotics).
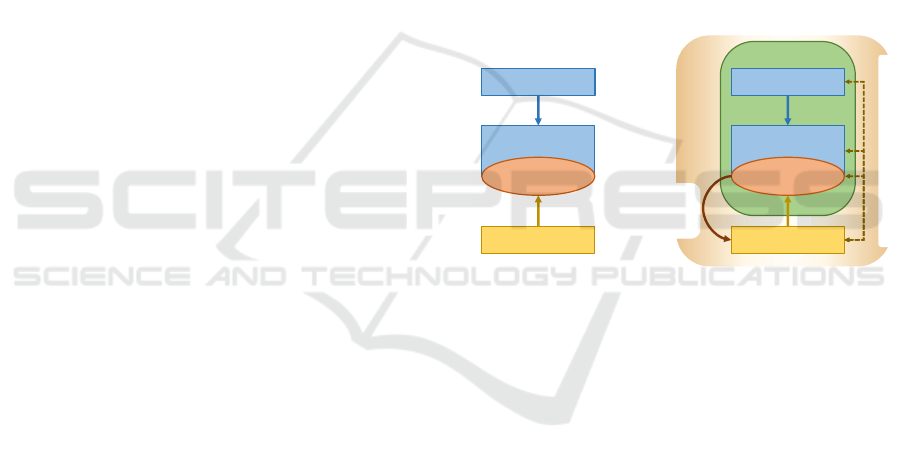
Figure 2: Comparison of a classic sequential design and
engineering process for forestry (a) and the developed
interlaced concept building on DTs and a Virtual Forest (b):
usually a forestry plan leads to the individual operations,
which are performed with mobile machinery. The robots
were developed beforehand, where the structural design
was based on assumptions (a). There already exist
elaborated simulation tools to virtually represent this
workflow: the mobile machinery is represented as DT in the
Virtual Forest. The new concept adds structural design to
this scheme (left side of b)), thus enabling a holistic
simulation framework, which finally allows to do
optimization and automation (right side of b)).
5 REALIZATION VIA A DIGITAL
TWIN (DT)
In context of this paper, we present an in-depth
analysis of a harvester that is used to cut and segment
trees in forestry applications. The analysis is focused
on systems level mechanical aspects and detailed
structural analysis of selected elements. We created a
Forestry Plan
(thinning strategies)
Virtual Forest
Individual Operations
(cut this tree)
Mobile Machinery
(harvester)
leads to
Structural Design
(FEA)
determines
Forestry Plan
(thinning strategies)
Individual Operations
(cut this tree)
Digital Twin
(harvester)
Structural Design
(FEA)
enables
Holistic
Simulation
Framework
Possibilities for optimization and automation
a) b)
A Digital Twin based Approach to Structural Mechanics: New Perspectives for Robotics in Forestry and Beyond
277

virtual test scenario that highlights the interaction of
the harvester with its environment (i.e. cutting trees).
The DT of the harvester is shown in Fig. 3. It
consists of a detailed RBD model that models the
relevant parts of the harvester. The mechanical model
is parametrized according to estimated masses and
information provided by CAD data. The kinematics
of the crane and harvesting head are also extracted
from CAD data. Since we are not interested in the
hydraulic design of the crane, we can neglect the
hydraulic aspect in the DT and approximate the
hydraulic cylinders by two actuated rigid bodies. In
addition, we did not model the actuators based on
external forces 𝑓
but based on constraints
𝐽⋅ 𝑥= 𝑣
imprinting a desired velocity 𝑣
to the system. This way, it is easy to realize desired
motions of the crane without the need to emulate the
control software, leading to a more efficient DT.
Figure 3: DT of a Harvester.
Since the mechanical stresses in the telescope arm are
expected to cause the most structural stress on the
crane, we decided to analyse these stresses in detail.
Therefore, the bearing forces and torques are
measured in a RBD simulation and are injected to the
FEA at defined injection points, as shown in Fig. 4.
We intentionally realized a unidirectional coupling,
since the expected deformations will be very small,
and the material will either withstand the mechanical
loads or burst entirely. This way, complex and
computationally demanding bidirectional coupling
between RBD and FEA can be avoided.
Figure 4: Interface between RBD Simulation and FEA
Simulation.
In addition to the DT of the harvester, we realized
a DT of a forest environment (as shown in Fig. 5).
The Virtual Forest is built from GIS data. In the direct
neighbourhood of the harvester, the trees have been
replaced by their DTs, meaning that they include a
full RBD model approximating their collision shape
and mass distribution. The interaction between the
harvesting head and the trees is described by a spring-
damper model with Coulomb friction, approximating
contact and friction forces. Additionally, the ground
contact of the harvester is modelled by individual
spring-damper models and Coulomb friction
allowing to roughly estimate the mechanical stress to
the soil surface.
By fusing all DTs in a holistic scenario, we are
able to simulate the interaction of the harvester with
its environment via contact forces and friction. This
way, the dynamic loads that occur during cutting a
tree can be simulated and predicted easily. Emerging
from these DTs, we are able to realize the intended
application.
6 EXAMPLE APPLICATION
SCENARIO: DISPLACEMENTS
ON CRANE DURING
HARVESTING
In order to test not only the DTs, but also the whole
concept, a specific application scenario was chosen.
As it is displayed in Fig. 5, the harvester is cutting and
segmenting a tree in the holistic simulation
framework.
Figure 5: DT of a harvester in a forest environment cutting
a tree.
Fig. 6 shows the forces and torques calculated by
RBD on the top end of the last crane arm segment,
which were taken as input for the FEA (see Fig. 4).
Several points of the recorded curves (green
arrows in Fig. 6) can be assigned clearly to specific
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
278
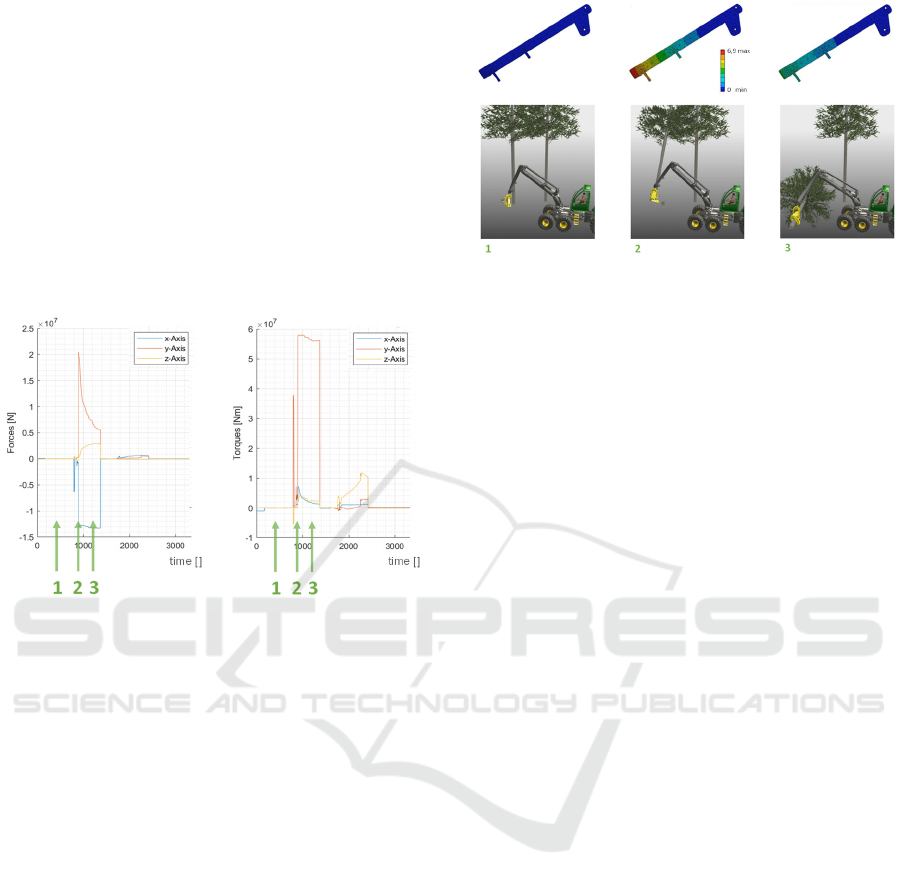
work steps of the task shown in the lower row of Fig.
7. First of all, there is a time span without any
recognizable forces on the crane arm, when the
harvester is moving to a suitable position for cutting
the tree (point 1 in Fig. 6 and Fig. 7). Then there are
two force peaks: one, when it’s connecting to
(“hitting”) the tree and the second one, when the
cutting is done and the tree falls over (point 2). This
is where a huge torque is starting to be recorded, as
the tree is now hold horizontally by the harvester.
During the segmentation process, this torque (and the
force) declines, as the leverage effect decreases with
an ever shorter tree trunk (point 3).
As expected, the deformation of the crane arm
segment behaves accordingly (upper row of Fig. 7)
with no deformation without force (point 1), a
deformation peak at point 2 during the cutting and a
slightly deformation during the segmentation process
(point 3).
It has to be clarified again, that this application
scenario is exemplary and e.g. no hydraulic effects
were considered, thus the results of the FEA are
qualitatively right, but cannot be quantified.
Nevertheless, if the missing information is provided
(e.g. by the manufacturer), this can be easily
implemented. This is another advantage of the
realization via DT, as the same model gets more and
more sophisticated while using the same holistic
simulation framework.
Figure 7: The upper row shows different deformations of
the crane arm. As this was an exemplary study, the results
are qualitatively and not absolutely. The time points 1, 2, 3
from Fig. 6 can be directly assigned to characteristic actions
of the harvester and the resulting deformations of the crane.
Furthermore, it is even possible to focus on different
aspects of the Virtual Forest in this small example:
from an ecological point of view, the impact on the
environment might be analysed as compression of the
ground or destruction of the undergrowth. On the
other hand, for economics, it might be interesting to
collect all information about the cut tree or to
examine, whether a neighbouring tree was damaged
during the process. The respective focus can be easily
analysed by choosing different visualization styles,
while the underlying simulation stays the same: e.g.
Fig. 5 for the ecological point of view and Fig. 7 for
the economic one.
7 CONCLUSION
In this work, a holistic simulation framework was
enabled by taking a DT based approach to structural
mechanics. This concept leads to a more profound
structural design of robots in highly dynamic
environments, as the underlying FEA may be
performed directly after a certain operation is done
virtually. This is achieved by creating DTs of the
robot itself and the whole environment and
calculating the explicit forces acting on the robot with
the help of RBD.
Especially in forestry, neat structural layout is
crucial, as any operation with mobile machinery has
not only economic consequences, but might have a
huge ecological impact as well. Thus, in this work,
the developed concept was directly interlaced with a
Virtual Forest and an exemplary application scenario
of a harvester cutting and segmenting a tree was
successfully performed.
Figure 6: Recorded forces and torques for joint 1 during the
performed task of cutting and segmenting a tree. (The x-
axis is displaying simulation time and therefore without
a
unit). The green arrows mark specific points in time (see
Fig. 7).
A Digital Twin based Approach to Structural Mechanics: New Perspectives for Robotics in Forestry and Beyond
279

8 OUTLOOK
In future work, the execution of the developed
concept could be automated and – subject to the
condition that required computing time and hardware
is available – made bidirectional concerning RBD and
FEA. This would allow to perform parameter studies,
do even more sophisticated optimizations or to
integrate continuative concepts such as structural
health monitoring.
Even more important, there will be a sophisticated
test of the presented work during an upcoming
project. The involved industry partner will build a
completely new type of harvester crane and its
structure is designed with the help of the developed
holistic simulation. As all preliminary work is done,
real life data (exceeding simple experiments) will
directly be used to further analyse this ansatz,
quantify its limits and validate the concept and
implementation in general.
REFERENCES
Anitescu, M.; F. Potra: “Formulating dynamic multi-
rigidbody contact problems with friction as solvable
linear complementarity problems” in: Nonlinear
Dynamics 14 (1997), No. 3, pp. 231–24.
Atorf, L.; J. Roßmann: "Interactive Analysis and
Visualization of Digital Twins in High-Dimensional
State Spaces," in: 15th International Conference on
Control, Automation, Robotics and Vision (ICARCV),
Singapore, 2018, pp. 241-246, doi: 10.1109/
ICARCV.2018.8581126.
Baraff, D.: “Linear-time dynamics using Lagrange
multipliers” in: Proceedings of the 23rd annual
conference on Computer graphics and interactive
techniques ACM, 1996, pp. 137–146.
Bathe K.-J.: Finite Element Procedures, Prentice-Hall, Inc.,
New Jersey, 1996.
Baumgarte, J.: “Stabilization of constraints and integrals of
motion in dynamical systems” in: Computer methods in
applied mechanics and engineering 1 (1972), No. 1, pp.
1–16.
Bender, J.; M. Müller, M.A. Otaduy, M. Teschner, M.
Macklin: “A survey on position-based simulation
methods in computer graphics” in: Computer graphics
forum Bd. 33 Wiley Online Library, 2014, pp. 228–251.
Busch, M.: Zur Effizienten Kopplung von
Simulationsprogrammen, Dissertation in Mechanical
Engineering at the University Kassel, Kassel University
Press GmbH, Kassel, 2012.
Cheng, C.; J. Fu, H. Su, L. Ren: “Recent Advancements in
Agriculture Robots: Benefits and Challenges” in:
Machines 2023, 11, 48. https://doi.org/10.3390/
machines11010048.
Chung, G-J.; D-H. Kim, “Structural Analysis of 600 Kgf
Heavy Duty Handling Robot” in IEEE Conference on
Robotics, Automation and Mechatronics, June 2010,
pp. 40-45.
Dietz, S.; G. Hippmann, G. Schupp: “Interaction of vehicles
and flexible tracks by co-simulation of multibody
vehicle systems and finite element track models” in:
The Dynamics of Vehicles on Roads and Tracks, Vol.
37, Swets & Zeitlinger, Denmark, 2001, pp. 372–384.
Featherstone, R.: Rigid body dynamics algorithms,
Springer, 201.
Kaufmann, D.; J. Rossmann: “Proof of Concept for Using
Non-Linear Springs to Integrate Deformable
Components’ Behavior into a Real-Time Capable
Overall System Simulation for Robotics” in: IEEE
International Conference on Advanced Intelligent
Mechatronics (AIM), 2018, Auckland, New Zealand,
2018, pp. 1384-1389, doi: 10.1109/AIM.
2018.8452277.
Losch, D.; J. Rossmann: “Simulation-Based Analysis of
Mechanized Wood Harvest Operations” in: 4th
International Conference on Industrial Engineering
and Applications, 2017, 978-1-5090-6773-2/17/$31.00
©2017 IEEE.
Negri, E.; L. Fumagalli, and M. Macchi, “A review of the
roles of digital twin in cps-based production systems”
in: Procedia Manufacturing, vol. 11, pp. 939 – 948,
2017, FAIM 2017, Modena, Italy.
Rautio, P.; H. Lideskog, U. Bergsten, M. Karlberg: “Lean
forestry – A paradigm shift from economies of scale to
precise and sustainable use of ecosystem services in
forests” in: Forest Ecology and Management 530,
2023, pp.1-6.
Rossmann, J.; M. Schluse, C Schlette: “The Virtual Forest:
Robotics And Simulation Technology As The Basis For
New Approaches To The Biological And The Technical
Production In The Forest” in: The 13th World Multi-
Conference on Systemics, Cybernetics and Informatics:
WMSCI 2009, July 10-13, Orlando, Florida, USA, Vol.
2, pp. 33-38, ISBN 978-1-934272-59-6.
Smith, R.: Open Dynamics Engine: Manual. http://ode
.org/wiki/ index.php?title=Manual. Version: 2019.
Stewart, D.; J.C. Trinkle: “An implicit time-stepping
scheme for rigid body dynamics with Coulomb
friction” in: Proc. ICRA. Millennium Conf.. IEEE Int.
Conf. Robotics and Automation. Symposia Proceedings
(Cat. No.00CH37065) Bd. 1, 2000, S. 162–169 vol.1.
Visser, R.; O. F. Obi: “Automation and Robotics in Forest
Harvesting Operations: Identifying Near-Term
Opportunities” in: Croat. j. for. eng. 42(2021)1, pp. 13-
24.
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
280
