
Towards Computational Performance Engineering for
Unsupervised Concept Drift Detection:
Complexities, Benchmarking, Performance Analysis
Elias Werner
1,2 a
, Nishant Kumar
2,3 b
, Matthias Lieber
1,4 c
, Sunna Torge
1,2 d
,
Stefan Gumhold
1,2,3 e
and Wolfgang E. Nagel
1,2,4
1
Center for Interdisciplinary Digital Sciences (CIDS), Technische Universit
¨
at Dresden, Germany
2
Center for Scalable Data Analytics and Artificial Intelligence (ScaDS.AI) Dresden/Leipzig, Germany
3
Chair of Computer Graphics and Visualization (CGV), Technische Universit
¨
at Dresden, Germany
4
Center for Information Services and High Performance Computing (ZIH), Technische Universit
¨
at Dresden, Germany
Keywords:
Concept Drift Detection, Performance Engineering, Complexities, Benchmark, Performance Analysis.
Abstract:
Concept drift detection is crucial for many AI systems to ensure the system’s reliability. These systems often
have to deal with large amounts of data or react in real-time. Thus, drift detectors must meet computational
requirements or constraints with a comprehensive performance evaluation. However, so far, the focus of de-
veloping drift detectors is on inference quality, e.g. accuracy, but not on computational performance, such
as runtime. Many of the previous works consider computational performance only as a secondary objective
and do not have a benchmark for such evaluation. Hence, we propose and explain performance engineering
for unsupervised concept drift detection that reflects on computational complexities, benchmarking, and per-
formance analysis. We provide the computational complexities of existing unsupervised drift detectors and
discuss why further computational performance investigations are required. Hence, we state and substantiate
the aspects of a benchmark for unsupervised drift detection reflecting on inference quality and computational
performance. Furthermore, we demonstrate performance analysis practices that have proven their effective-
ness in High-Performance Computing, by tracing two drift detectors and displaying their performance data.
1 INTRODUCTION
In the last years, the amount of available data in-
creased significantly and is expected to be about
175 ZB only for the year 2025 (Reinsel et al., 2018).
The availability of vast amounts of data and the ex-
ploitation of computing resources such as graphics
processing units (GPUs) or tensor processing units
(TPUs) led to the emergence of deep learning (DL)
methods in many applications as predictive main-
tenance (Martinez et al., 2018), marine photogra-
phy (Langenk
¨
amper et al., 2020), transportation plan-
ning (Grubitzsch et al., 2021) or computer vision
tasks such as object detection (Kumar et al., 2023).
a
https://orcid.org/0000-0003-2549-7626
b
https://orcid.org/0000-0001-6684-2890
c
https://orcid.org/0000-0003-3137-0648
d
https://orcid.org/0000-0001-9756-6390
e
https://orcid.org/0000-0003-2467-5734
However, many of these applications face differ-
ent challenges which concern 1.) the inference qual-
ity (e.g. accuracy) of the model and thus the effec-
tiveness of the application and 2.) the computational
performance of the application in terms of the com-
pute time and the compute resources.
The effectiveness of the applications is often de-
termined by the inference quality (e.g. accuracy) of
the DL model on a different data distribution than the
distribution which the model was trained with. How-
ever, while pure DL based applications work nicely
on the training data distribution, they might not per-
form as well when the test data distribution is differ-
ent from the training data distribution. Such changes
in the data distributions are referred to as concept
drift and are documented in many different applica-
tion fields. For example, (Grubitzsch et al., 2021)
outlined that the robustness of AI models is question-
able for sensor data-based transport mode recogni-
tion. The reason is the variety of context information,
318
Werner, E., Kumar, N., Lieber, M., Torge, S., Gumhold, S. and Nagel, W.
Towards Computational Performance Engineering for Unsupervised Concept Drift Detection: Complexities, Benchmarking, Performance Analysis.
DOI: 10.5220/0012758600003756
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 13th International Conference on Data Science, Technology and Applications (DATA 2024), pages 318-329
ISBN: 978-989-758-707-8; ISSN: 2184-285X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

e.g. device type or user behavior that introduces con-
cept drift into the data. (Langenk
¨
amper et al., 2020)
demonstrated concept drift when using different gear
or changing positions in marine photography and ex-
plained the effect on DL models. Hence, such appli-
cations need to be accompanied by approaches such
as concept drift detector (DD) to estimate changes in
the data distribution and to decide the robustness of
a DL model on a given input. DDs that require the
immediate availability of data labels are referred to
as supervised and DDs that reduce the amount of re-
quired data labels or can operate completely in the ab-
sence of labeled data are referred to as unsupervised.
The second challenge for applications is to han-
dle large amounts of data or high-speed data streams
and react in real-time. On the other hand, applica-
tions are often bound to certain hardware require-
ments or have to operate with limited computational
resources. These observations should point to the ne-
cessity of thorough investigations concerning com-
putational performance, i.e. runtime, memory usage,
and scalability. Thus, with DDs being an important
part of a robust DL pipeline, it is also necessary to
conduct such investigations on DDs. Note that we re-
fer to metrics as runtime or memory usage as compu-
tational performance and to metrics such as accuracy
or recall as inference quality. However, the literature
does not focus on computational performance inves-
tigations but concentrates on the methodological im-
provements and inference quality evaluation of DDs
on small-scale examples only as outlined in the survey
by (Gemaque et al., 2020). Moreover, while theoret-
ical computational complexities play a crucial role in
understanding algorithmic behaviors, they fall short
of encompassing the real-world performance of an al-
gorithm. This is attributed to various factors such as
implementation, compiler optimizations, data distri-
bution, and other external influences, which become
significant when the algorithm operates on real hard-
ware and processes real data.
Our work focuses on unsupervised DDs that can
operate in the absence of data labels, as the provi-
sion of labeled training data is very expensive and
for many applications not given. So far, there
is no previous work comprehensively investigating
the computational performance of unsupervised DDs.
In response, our work reflects on the field of per-
formance engineering, which has its roots in High-
Performance Computing (HPC) and introduces it for
unsupervised DDs. Thus, we discuss important pil-
lars for a comprehensive consideration of computa-
tional performance: complexity analysis, benchmark-
ing, and performance analysis. This work’s key con-
tributions include:
1. We reflect on the existing literature and show that
it lacks computational performance evaluation for
unsupervised concept drift detection.
2. We show a concrete path towards performance en-
gineering of DDs and discuss complexity analy-
sis, benchmarking, and performance analysis.
3. We provide the time and space complexities for a
set of existing DDs.
4. We state and substantiate the requirements for a
benchmark of unsupervised DD.
5. We demonstrate the effectiveness of performance
analysis tools by tracing two DDs and present the
performance data.
The rest of the paper consists of four parts. In Sec-
tion 2, we introduce preliminaries and define concept
drift. Section 3, provides an overview of the prior
works for unsupervised concept drift detection and
explains the scope of previous computational perfor-
mance evaluation. In Section 4, we introduce perfor-
mance engineering for unsupervised concept drift de-
tection. We provide computational complexities and
discuss them. Furthermore, we examine aspects for
a comprehensive benchmark and give initial insights
into performance analysis for DDs.
2 BACKGROUND
This section formally defines concept drift and intro-
duces supervised and unsupervised drift detection.
We follow the formal notations and definitions
by (Webb et al., 2016) for the following illustrative
equations, but also consider (Gama et al., 2014) and
(Hoens et al., 2012) among others. Note that our as-
sumptions hold for the discrete and continuous realms
in principle. Nevertheless, for ease of simplification,
we consider only the discrete realm in our notations.
Assume for a machine learning (ML) problem there
is a random variable X over vectors of input features
[X
0
, X
1
, ..., X
n
]. Moreover, there is a random variable
Y over the output that can be either discrete (for classi-
fication tasks) or continuous (for regression tasks). In
this case, P(X) and P(Y ) represent the probability dis-
tribution over X and Y respectively (priori). P(X , Y )
represents the joint probability distribution over X and
Y and refers to a concept. At a particular time t, a con-
cept can now be denoted as P
t
(X, Y ). Concept drift
refers to the change of an underlying probability dis-
tribution of a random variable over time. Formally:
P
t
(X, Y ) ̸= P
t+1
(X, Y ) (1)
Supervised drift detection is the process where the
Towards Computational Performance Engineering for Unsupervised Concept Drift Detection: Complexities, Benchmarking, Performance
Analysis
319

data labels Y are always immediately available and
unsupervised DDs detect drift without labeled data.
3 RELATED WORK
In the field of supervised drift detection, different in-
vestigations by (Barros and Santos, 2018) and (Palli
et al., 2022) exist, that present and compare multiple
supervised DDs. Additionally, (Mahgoub et al., 2022)
presents a benchmark of supervised DDs that consid-
ers the runtime and memory usage of the related DDs
besides the DDs’ quality.
To the best of our knowledge, there is no
such benchmark for unsupervised DDs, Neverthe-
less, surveys exist that summarize the related work.
(Gemaque et al., 2020) and (Shen et al., 2023) pro-
vide overviews and taxonomies to classify unsuper-
vised drift detectors following different criteria. Al-
though both surveys mention the importance of com-
putational performance considerations, they did not
incorporate such objectives in their overviews thor-
oughly.
Investigating prior methods for unsupervised DDs
does also not provide enough evidence for thorough
computational performance investigations. Several
works (Mustafa et al., 2017; Kifer et al., 2004; Dit-
zler and Polikar, 2011; Haque et al., 2016; Sethi
and Kantardzic, 2017; Kim and Park, 2017; Zheng
et al., 2019; Cerqueira et al., 2022; Lughofer et al.,
2016; de Mello et al., 2019; G
¨
oz
¨
uac¸ık et al., 2019;
G
¨
oz
¨
uac¸ık and Can, 2021) do not conduct any runtime,
memory, energy or scalability performance measure-
ments. Thus, it is difficult to assess their computa-
tional performance in real-world applications. Other
works by (Dasu et al., 2006; Gu et al., 2016; Lu
et al., 2014; Qahtan et al., 2015; Liu et al., 2017; Liu
et al., 2018; Song et al., 2007; dos Reis et al., 2016;
Greco and Cerquitelli, 2021; Pinag’e et al., 2020)
conduct few experiments concerning runtime on mul-
tiple datasets and compared their approaches to other
works sporadically. Only (Liu et al., 2018) investi-
gated memory utilization. In addition, not all papers
perform their evaluation with the same setting and
vary in the data sets chosen, the number and dimen-
sion of data points, and how the computational perfor-
mance measurements are carried out. Although some
works consider the theoretical computational com-
plexity of their algorithms, this can not replace empir-
ical measurements on real datasets and machines, e.g.
as shown by (Jin et al., 2012) highlighting the impact
of computational performance bugs on the runtime of
implementations. However, as discussed by (Lukats
and Stahl, 2023), source code is often not available
and the reproducibility of presented experiments is of-
ten questionable.
Future applications with high data volumes, high
data velocities, or computational resource constraints
will require resource-efficient approaches and imple-
mentations. Contrarily, computational performance
aspects for unsupervised concept drift detection were
only investigated as a secondary objective in the liter-
ature. Thus, we require proper and well-documented
implementations that enable consistent computational
performance evaluations to assess the applicability
of DDs for use cases with high volumes and high-
velocity data. Moreover, to obtain resource-efficient
AI systems and to avoid waste of resources, scalable
or parallel DDs and the resource-efficient deployment
of the approaches need to be investigated. For such
developments, the HPC community has broad exper-
tise in the field of performance engineering. Besides
computational complexity analysis and substantiated
best practices in benchmarking, several tools such as
Score-P (Kn
¨
upfer et al., 2012) or Vampir (Kn
¨
upfer
et al., 2008) are developed to support the system-
atic performance analysis of applications. Applying
these methods to unsupervised DDs supports the eval-
uation of the computational performance of differ-
ent approaches and allows systematically setting up
resource-efficient solutions for future applications.
4 COMPUTATIONAL PERFOR-
MANCE ENGINEERING
In this section, we introduce our contributions to as-
sess the computational performance of unsupervised
DDs. This includes 1.) the computational complex-
ity of a set of DDs in Section 4.1, 2.) the concept
of a comprehensive benchmark in Section 4.2, and
3.) a clear workflow for performance analysis of DDs
in Section 4.3, exemplarily presented on two instru-
mented implementations.
As a motivating example, we randomly selected
the two unsupervised DDs Incremental Kolmogorov-
Smirnov (IKS) (dos Reis et al., 2016) and the student-
teacher approach STUDD (Cerqueira et al., 2022)
and measured the runtime and memory along with
the accuracy and amount of requested labels of
four pipelines: 1.) IKS: retraining of the base ML
model after drift detection with IKS 2.) STUDD: re-
training of the base ML model after drift detection
with STUDD 3.) Baseline 1 (BL1): pipeline with-
out re-training of the base ML model 4.) Baseline
2 (BL2): retraining of the base ML model after ev-
ery 5000 samples. IKS detects drift based on the
changes in the raw input data distribution by continu-
DATA 2024 - 13th International Conference on Data Science, Technology and Applications
320

85
68
61
80
100
IKS
STU DD
BL1
BL2
Accuracy (%)
25
50
75
50
3
0
100
100
IKS
STU DD
BL1
BL2
Labels (%)
25
50
75
5266
10218
4321
4432
12k
IKS
STU DD
BL1
BL2
Runtime(s)
3k
6k
9k
704
1008
446
698
1.2k
IKS
STU DD
BL1
BL2
Memory(MB)
300
600
900
Figure 1: Accuracy, amount of labels, runtime, and peak
memory of the pipelines IKS, STUDD, BL1, and BL2 on
Forest Covertype dataset.
ously applying a Kolmogorov-Smirnov test on a ref-
erence dataset and a detection dataset. STUDD con-
sists of a student auxiliary ML model to mimic the
behavior of a primary teacher decision ML model.
Drift is detected if the mimicking loss of the student
model changes with respect to the teacher’s predic-
tions. All pipelines are implemented in Python and
use a Random Forest with 100 decision trees as the
base classifier. The base classifier is trained with the
first 5000 samples of the dataset, the remaining data is
processed as a stream by the several pipelines. We ap-
plied all pipelines on the Forest Covertype (Blackard
and Dean, 1999) dataset that consists of 54 features
with seven different forest cover type designations in
5.8 ∗10
6
data samples. All experiments ran with a
single CPU core of an AMD EPYC 7702, fixed to 2.0
GHz frequency. Note that since the implementations
do not run in parallel, we do not consider multiple
CPU cores. However, using HPC still offers advan-
tages for benchmarking over a local setup, such as a
fixed CPU frequency and low system noise. In addi-
tion, we refer to best practices and methodologies in
the field of HPC in this section. The source code of
the experiments for the depicted results will be avail-
able publicly
1
.
Our results are depicted in Figure 1. BL1 has the
lowest computational demand on the dataset, i.e. low-
1
https://github.com/elwer/Perf DD
est runtime and peak memory. However, it achieves
the lowest accuracy without requiring any further data
labels while processing the stream. BL2 has a slightly
higher computational demand than BL1 requests all
data labels due to the continuous re-training of the
base model and achieves much higher accuracy than
BL1. IKS consumes slightly more memory and run-
time than BL2. It achieves slightly higher accuracy
than BL2 while reducing the amount of required la-
bels by 50%. STUDD requires more memory than
the other pipelines and also the runtime is by far the
highest. It achieves a higher accuracy than BL1 but
lower than BL2. However, the strength of STUDD
is that the amount of requested labels is reduced to
only 3% of the total stream. Hence, we conclude that
for our setting, both DDs have their strengths: IKS
leads to a moderate reduction of requested labels by
preserving high accuracy without high computational
overhead. STUDD dramatically reduces the number
of requested labels by improving accuracy over BL1
at a high computational cost.
However, based on those measurements, it is un-
clear how DD based pipelines behave in different set-
tings since they highly rely on the chosen datasets, hy-
perparameters, or hardware constraints. (Barros and
Santos, 2018) demonstrated different behaviors of su-
pervised DDs on different datasets. Thus, we need
also a benchmark comprising different unsupervised
DDs. The Section 4.1. aims at an assessment of the
scaling behavior in space and time, and the complex-
ity results support the evaluation of the computational
performance of DDs in a benchmark.
4.1 Complexity Analysis
We determined the complexities for a set of DDs that
do not rely on a ML model or another method, that is
highly dependent on the underlying use case or data.
We determined the complexities based on the mathe-
matical foundations and pseudo-code presented in the
original works. Additionally, we aligned complexities
that have been presented in the literature according to
our notations. Finally, we state the complexities for
the approaches KL (Dasu et al., 2006), PR (Gu et al.,
2016), CD (Qahtan et al., 2015), NM-DDM (Mustafa
et al., 2017), HDDDM (Ditzler and Polikar, 2011),
IKS (dos Reis et al., 2016), BNDM (Xuan et al., 2020),
ECHO (Haque et al., 2016), OMV-PHT (Lughofer
et al., 2016), DbDDA (Kim and Park, 2017), CM (Lu
et al., 2014). See the Appendix for our justifica-
tions of the outlined complexities. Although most ap-
proaches require an initialization phase for their drift
detection, the amount of data computed in this phase
is much smaller than the amount of data processing
Towards Computational Performance Engineering for Unsupervised Concept Drift Detection: Complexities, Benchmarking, Performance
Analysis
321
Table 1: Time and Space complexity per sample over
the data stream. Parameters: d: dimensions, w: win-
dow size, i.e examined data points, b: bins in histogram
(NM-DDM and OMV-PHT only), e: size of ensemble (Db-
DDA only), s: sampling times (NN-DVI only), δ: min-
imum value for the box length property (KL only).
Approaches: KL (Dasu et al., 2006), PR (Gu et al., 2016),
CD (Qahtan et al., 2015), NM-DDM (Mustafa et al., 2017),
HDDDM (Ditzler and Polikar, 2011), IKS (dos Reis et al.,
2016), BNDM (Xuan et al., 2020), ECHO (Haque et al.,
2016), OMV-PHT (Lughofer et al., 2016), DbDDA (Kim
and Park, 2017), CM (Lu et al., 2014).
Approach Time Complexity Space Complexity
KL O(d ×log(
1
σ
)) O(w ×d)
PR O(log
2
w) O(w ×d)
CD O(d)
drift: O(d
2
×w)
O(w + d)
NM-DDM O(w ×d ×b) O(d ×b)
HDDDM O(⌊
√
w⌋×d) O(⌊
√
w⌋×d)
IKS O(log(w)) O(w ×d)
BNDM O(log(w)) O(w ×d)
ECHO O(w
2
) O(w)
OMV-PHT O(w + b) O(w + b)
DbDDA O(1)
ens.: O(e)
O(w)
ens.: O(e ×w)
CM O(w) O(w ×d)
the stream. Therefore, we skip the complexities of the
initialization phase and focus on the complexity per
sample while processing the stream.
Table 1 shows the time and space complexities of
the considered approaches when processing a stream.
Only ECHO has a quadratic time complexity with re-
spect to the window size, i.e. doubling w leads to qua-
drupling the runtime. CD has a quadratic time com-
plexity with respect to the dimensions of the data only
for the case of drift as reported in the original publi-
cation. Therefore, CD’s time complexity is dependent
on the nature of the data but also on the quality (ac-
curacy) of the drift detection itself, i.e. reporting too
much drift, leads to a high increase of the runtime.
KL is the only approach that depends only on the data
dimensions d and an internal parameter δ for main-
taining the data structure incrementally. The other
approaches’ time complexities depend on the window
size w directly, i.e. examined data points. The low-
est time complexity is determined for DbDDA by it-
eratively maintaining the mean and standard devia-
tion over the ML model confidences in two windows
and comparing this to a threshold. Therefore, the time
complexity is constant, and for the ensemble case, the
number of ensemble members e. For the space com-
plexity, KL, PR, IKS, BNDM and CM store all the
data points, i.e. O(w ×d). ECHO and DbDDA rely
on w only since only one value per window needs to
be stored. For DbDDA ensemble, space complexity
grows proportionally with the ensemble size e and w.
Complexities are important pillars in analyzing a
DDs’ behavior concerning runtime and memory since
they highlight factors that influence time and space
complexity behaviors. However, they are not enough
to assess real-world scenarios on real data since the
complexities only reflect the scaling behavior but no
absolute runtimes or memory requirements. Thus,
even if the complexity of one approach is higher than
another one, better implementation and higher drift
detection accuracy might overcome this theoretical
drawback. Indeed, this should point to the necessity
of proper and optimized implementations, empirically
verifying the estimated theoretical complexities. Ad-
ditionally, the approaches’ detection accuracy is not
reflected in the time and space complexities at all.
Thus, we need empirical evidence reflecting on the
computational performance and quality as a crucial
additional investigation for concept drift detection.
4.2 Benchmarking
Conducting a benchmark in the field of ML often
refers to comparing quality measures, e.g. accuracy or
recall of different approaches. Therefore, aiming for
computational performance as one main objective in
benchmarking faces particular challenges as initially
discussed in (Mattson et al., 2020). These particular
challenges are explained in this section with respect
to the field of unsupervised concept drift detection.
Diversity in Datasets: The works identified in Sec-
tion 3 leverage different synthetic and real-world
datasets that are used to benchmark unsupervised
DDs. Synthetic data allows defining drift patterns,
e.g. drift occurrence or frequency. Moreover, it is pos-
sible to define the kind of drift, i.e. virtual vs real
drift, or the temporal occurrence, e.g. abrupt, incre-
mental, gradual, or reoccurring (Webb et al., 2016).
For a benchmark, this has the advantage of having
a ground truth, we can compare drift detection re-
sults and create individual scenarios to reflect differ-
ent settings for drift detection. Examples of synthetic
data sources are Hyperplane (Hulten et al., 2001) or
Agrawal (Agrawal et al., 1993) among others, that are
implemented in the Massive Online Analysis (Bifet
et al., 2010) framework. However, the effectiveness
of using synthetic data depends on how well the data
represents real-world characteristics. This is empha-
DATA 2024 - 13th International Conference on Data Science, Technology and Applications
322

sized by (Souza et al., 2020) explaining the impor-
tance and challenges for benchmarking against real-
world data and providing a broad overview of avail-
able real-world datasets such as Abrupt Insects (dos
Reis et al., 2016), Gas (Vergara et al., 2012), Electric-
ity (Harries et al., 1999), Forest Covertype (Blackard
and Dean, 1999) or Airlines (Ikonomovska et al.,
2011). This is further affirmed by (Gemaque et al.,
2020), referring to the fact that the amount of data
used for evaluating DDs is small across the whole lit-
erature. Furthermore, we recognized a big gap be-
tween the amount of data used for evaluating DDs
compared to benchmarks in the data streaming do-
main that use datasets with multiple million data
points, e.g. Amazon movie reviews (McAuley and
Leskovec, 2013) or Google web graph (Leskovec
et al., 2009). Additionally to data sizes, we propose
to reflect on class imbalances and multi-class data.
The multi-class scenario is given by many of the real-
world datasets, but should also be considered in syn-
thetic scenarios explicitly. (Palli et al., 2022) give ev-
idence on different behaviors of supervised DDs for
class imbalances in comparison to evenly distributed
class cases. They report similar results for multi-class
data in comparison to binary class. We need to extend
this research for unsupervised DDs.
Model Dependency: According to the survey
by (Shen et al., 2023), DDs can be separated into
two groups: A) differences in data distribution and
B) model quality monitoring. The latter can be con-
sidered model-dependent since it directly relies on a
model’s quality, whereas the first group can be con-
sidered model-independent. For the model-dependent
approaches, we identify two cases of unreliable drift
detection. The first case is when the model reports
high inference quality (e.g. high confidence) after
concept drift, leading to wrong predictions but no
detection by the DD. Even if there are no studies
that prove this behavior in general, there are stud-
ies that prove it for selected models. E.g. (Nguyen
et al., 2015) provides evidence that deep learning
models produce high confidence for incorrect predic-
tions, e.g. after concept drift. (Lughofer et al., 2016)
shows, that this is also the case for evolving fuzzy
classifiers. The second case is when the model reports
low inference quality (e.g. low confidences) without
concept drift, leading to incorrectly detected drift and
unnecessary computational overhead due to subse-
quent drift handling strategies. Overfitting (Hawkins,
2004) could be a reason for such behavior, which ap-
plies to all types of ML models. Thus, we conclude,
due to the heterogeneity of ML models, it is impor-
tant to reflect on different base models for a bench-
mark comprehensively comparing DDs from groups
A and B.
Baselines: The literature often suggests no concept
drift detection as a baseline for a benchmark (Souza
et al., 2021; Cerqueira et al., 2022; dos Reis et al.,
2016). In particular, this refers to an initially trained
ML model that is not retrained during the process-
ing of a data stream, nor is any action beyond the
inference process considered. Therefore, this is the
best possible runtime for a given ML model and data
stream and does not require any further labeled data.
On the other hand, this baseline indicates the mini-
mum inference quality (e.g. accuracy) that a pipeline
with a DD should achieve. Thus, a second baseline
should reflect the best inference quality possible while
processing the stream by re-training the ML model af-
ter n samples. Therefore, it requires 100% of the true
labels. (Souza et al., 2021) defines n = 1 and retrains
the ML model after each sample. This results in a
very high runtime overhead for that pipeline due to
the permanent re-training of the ML model but guar-
antees the highest possible accuracy.
Additionally, we propose to consider at least one
more baseline. This is due to the asymptotic behav-
ior of the runtime and the differing behavior of the
inference quality, e.g. accuracy, while increasing n
that indicates the number of samples after which a
classifier is re-trained while processing a stream. To
show this, we processed the five introduced datasets:
Abrupt Insects, Gas, Electricity, Forest Covertype and
Airlines. We implemented a Random Forest classifier,
that is trained on initial data and updated every n sam-
ples. For the smaller datasets Abrupt Insects, Gas, and
Electricity we used 500 samples for the initial train-
ing, while for the bigger Forest Covertype and Air-
lines datasets, we used 2000 samples. We initialized
n = 1 and increased n by 5 for each run while pro-
cessing the small datasets. For the big ones, we ini-
tialized n = 20 and increased n by 100. Our results
are depicted in Figure 2. For all datasets, the run-
time strongly decreases while increasing n. Accuracy
decreases slowly for all datasets and higher n might
have a higher accuracy than lower n depending on the
dataset and how well the period of re-training matches
the drift pattern. In fact, we suggest a value of n
such that the runtime is low, while still maintaining
the high accuracy provided at the bend of the runtime
curve for all datasets.
(Cerqueira et al., 2022) defines n = 100, still
achieving high inference quality on their considered
datasets while heavily reducing the runtime overhead
since re-training is conducted only for each 100 sam-
ples. While this is a good starting point for a prag-
Towards Computational Performance Engineering for Unsupervised Concept Drift Detection: Complexities, Benchmarking, Performance
Analysis
323
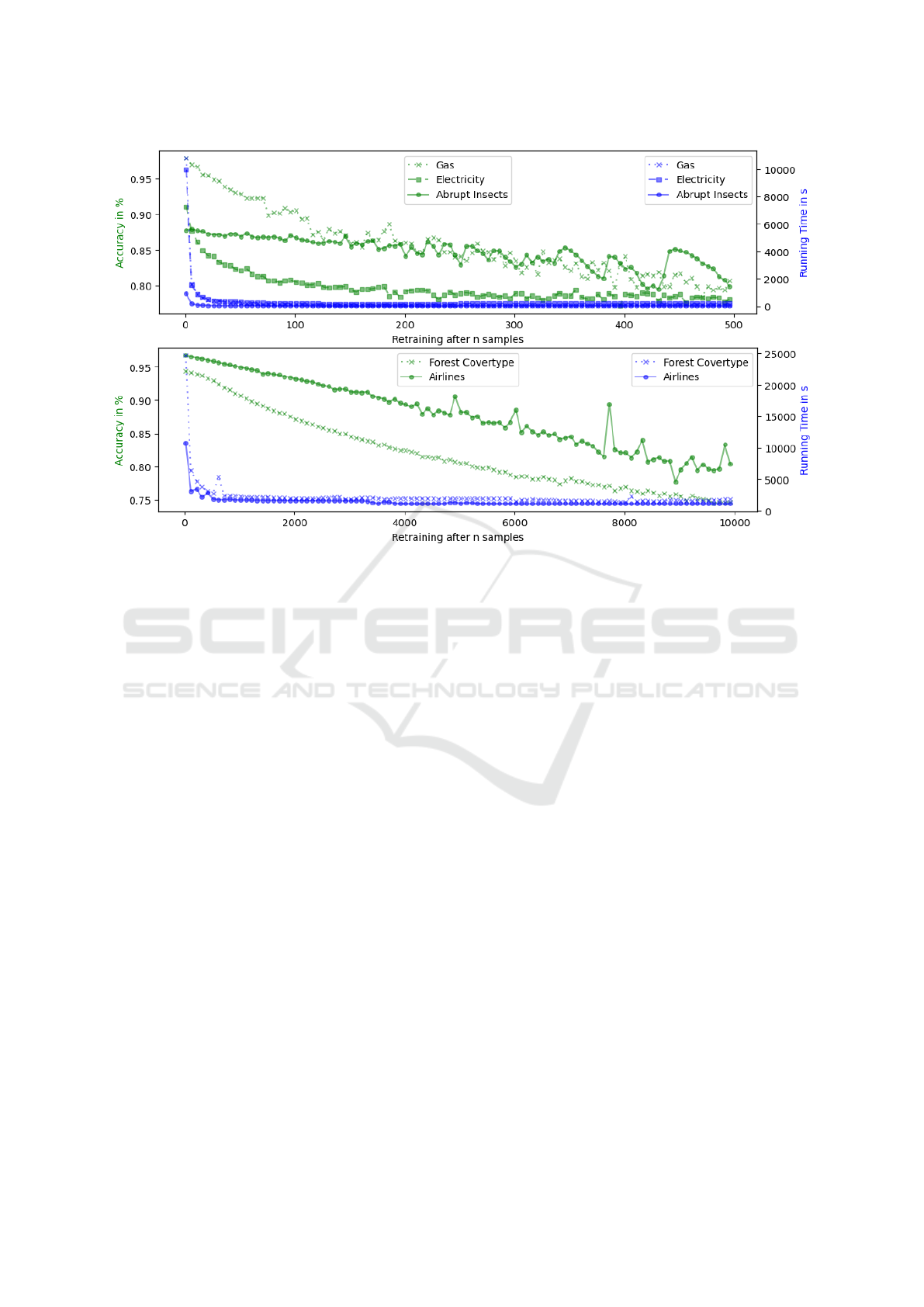
Figure 2: Accuracy and runtime behavior while processing streams over different datasets. The X-axis indicates the number of
samples after which re-training is conducted. The Y-axis (right/blue) shows runtime and Y-axis (left/green) shows accuracy.
Gas, Electricity, Abrupt Insects where initialized with n = 1 and sampled in steps of 5, Forest Covertype, Airlines were
initialized with n = 20 and sampled in steps of 100.
matic baseline, it might not be generally applicable
since it does not necessarily reflect on an optimum of
the curves, balancing accuracy and runtime. How-
ever, one can explore alternative values for n, i.e.
baselines depending on the dataset’s characteristics.
Set of Metrics: In (Barros and Santos, 2018), met-
rics to track the inference quality of a supervised
DD such as Accuracy, Precision, Recall, F1-Score,
True Positives, False Positives, Detection Delay, and
Mathew’s Correlation Coefficient were used. Addi-
tionally, we propose to track the (cumulative) Accu-
racy Gain per Drift as presented by (Wu et al., 2021)
to measure the effectiveness of a DD throughout a
stream and not only once for the whole dataset. For
unsupervised DD we also suggest tracking the amount
of requested labels, since some DDs detect drift in
an unsupervised manner but request labels for subse-
quent actions. To track computational performance,
we propose metrics such as runtime, resource utiliza-
tion, and efficiency, i.e. memory or CPU utilization.
(Mahgoub et al., 2022) did a similar investigation and
tracked the runtime and memory of several supervised
DDs. As explained in (Mattson et al., 2020), in-
ference quality and computational performance can’t
be considered independently, since achieving higher
quality might also require further computational over-
head as we also showed in Figure 2. Thus, we pro-
pose two strategies: 1.) select a threshold or set a
target quality for the inference, and measure the com-
putational resources to achieve that 2.) set a thresh-
old for the runtime or memory and compute the infer-
ence quality (accuracy) that is achievable under this
resource constraints. As indicated by Table 1, a sim-
ilar runtime for two DDs might require different set-
tings for DD parameters, e.g. window size w.
We highlighted four main considerations required
for a comprehensive benchmark of unsupervised
DDs. However, one preliminary requirement is the
availability of proper implementations of the DDs, i.e.
without crucial performance bugs that deteriorate the
computational performance of the implementations as
outlined by (Jin et al., 2012). Nevertheless, as inves-
tigated by (Lukats and Stahl, 2023), implementations
are scarce, and prose details are often insufficient for
proper re-implementations. This should point to the
necessity of the provision of proper descriptions or
implementations of the DDs by the community.
4.3 Performance Analysis
Performance analysis refers to testing, analyzing, and
optimizing systems to achieve computational perfor-
mance goals and to identify and resolve performance
DATA 2024 - 13th International Conference on Data Science, Technology and Applications
324
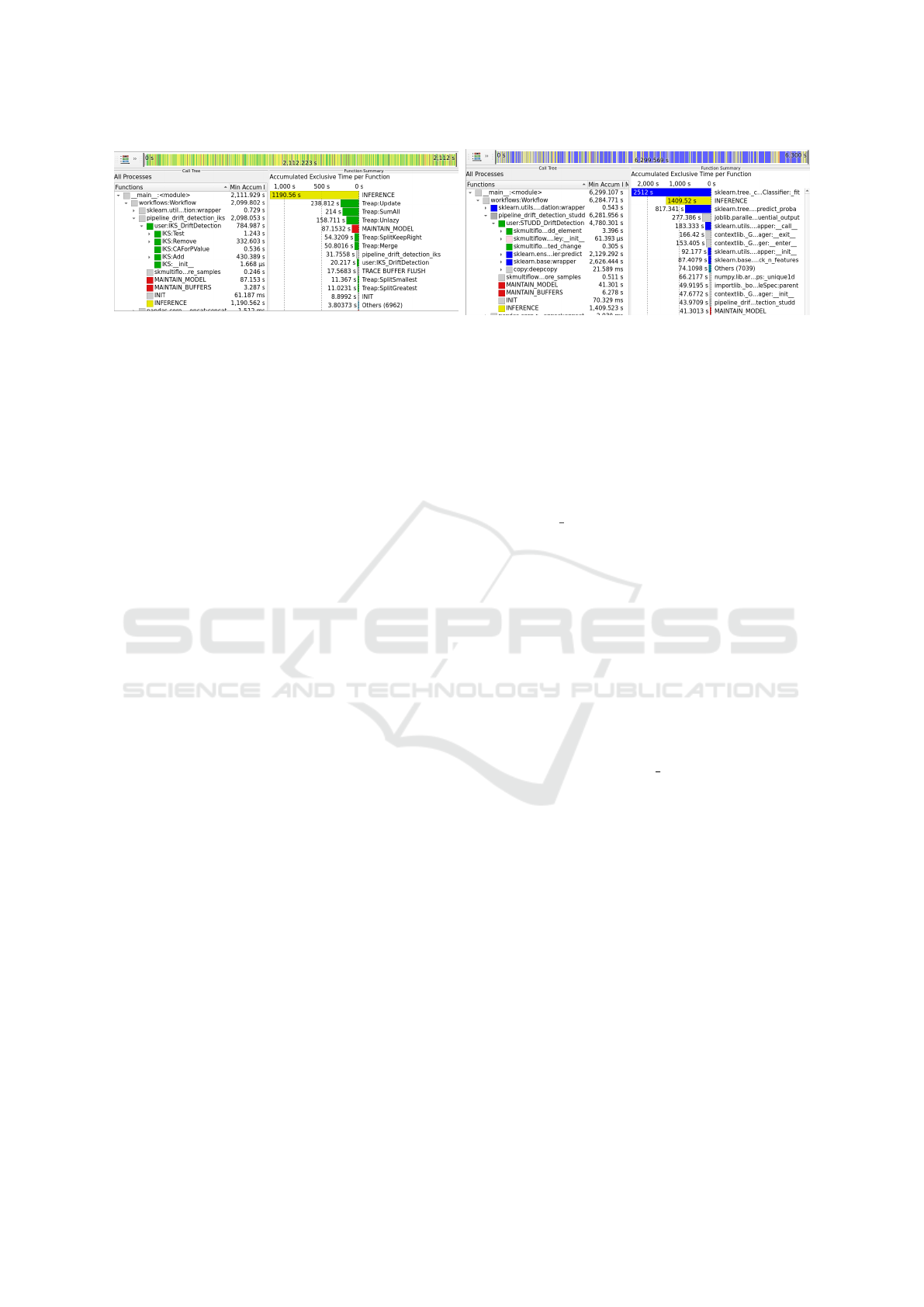
Figure 3: Vampir display of the IKS DD (left) and STUDD DD (right) performance data on the Forest Covertype dataset. In
each display, the left part shows the call tree and the right part shows the function summary, i.e. accumulated exclusive time
per function. User regions for the inference process are yellow, user regions for the drift detection are green, user regions for
maintaining buffers, and the ML model is red. sklearn functions are blue. The remaining functions are shaded grey.
bugs (Jin et al., 2012). It usually follows a two-step
workflow: 1.) profiling, i.e. accumulating perfor-
mance data, e.g. runtime of application functions or
memory 2.) tracing of an application to exactly record
program regions enter and exit over time. Both steps
support a performance analyst in identifying compu-
tational bottlenecks in implementations and improv-
ing an application’s behavior. For data science, it is
also crucial to reflect on the quality (e.g. accuracy)
when conducting performance analysis, emphasizing
the importance of holistic performance engineering,
e.g. improving the runtime behavior of an implemen-
tation while maintaining benchmark results. Score-
P (Kn
¨
upfer et al., 2012) is an established, scalable
open-source framework that supports profiling and
tracing. With the Score-P Python bindings (Gocht
et al., 2021), it supports the Python programming
language, which can be considered predominant in
data science. Additionally, a Score-P Jupyter ker-
nel (Werner et al., 2021) makes it available for exe-
cution in Jupyter notebooks. Vampir (Kn
¨
upfer et al.,
2008) is a tool to display performance data as col-
lected by Score-P.
To demonstrate the effectiveness of these work-
flows, we measured the run of the two Python-
based DDs STUDD and IKS on the Forest Covertype
dataset. Figure 3 displays the performance data of
the STUDD and IKS run in Vampir. The left part
shows the call tree displaying the invocation hierar-
chy across the functions and accumulates the runtime.
The middle part displays a timeline of the called func-
tions (top) and their call stack (bottom). The right part
shows the function summary, i.e. accumulated exclu-
sive time per function. For both displays, we consider
user regions for the inference process (yellow), user
regions for the drift detection (green), user regions
for maintaining buffers, and the ML model (red). The
other functions are shaded grey.
For STUDD, we additionally colored sklearn
functions in blue and derived the following: As dis-
played in the function summary, the STUDD im-
plementation mostly relies on sklearn while pro-
cessing the stream. Based on the call tree, we see
that the time for drift detection (4780s, 76%) pre-
dominates over time for inference (1409s, 22%).
The call tree also shows the high dependency of
user:STUDD DriftDetetion on the sklearn base
functionalities. With these insights, we conclude that
the runtime overhead for STUDD is significantly high
for processing the stream only due to the drift detec-
tion. This is mainly due to the approach of applying
and maintaining an additional student model. How-
ever, since it is mostly based on sklearn, which is
an established library with additional support for par-
allel execution, it is worth investigating how STUDD
scales across multiple cores or nodes.
For IKS, the most time for processing the pipeline
was spent on the inference process (1191s, 56%) as
shown in the call tree and the function summary. Nev-
ertheless, drift detection also takes 784s (37%) as
the call tree node user:IKS DriftDetetion shows.
This overhead is mostly based on the Add and Remove
functions of the IKS implementation, e.g. maintain-
ing the internal Treap data representation. The time
for maintaining the ML model and buffers can be
considered insignificant. With Vampir’s timeline
chart, it is possible to get further insights into chrono-
logical sequences of called functions. In Figure 4
we selected the period between the inference of two
subsequent samples of the data stream to investigate
IKS’ behavior per sample. We can see the recur-
sive call within IKS:Remove for removing the old-
est sample in the reference window. Subsequently,
the current sample is added and triggers a recur-
sive call within IKS:Add. Adding and removing a
sample mainly consists of a similar recursive se-
quence of methods, i.e. Treap:SplitKeepRight
(light green) at the beginning, Treap:Merge (dark
blue) at the end and either Treap:KeepGreatest
(cyan) or Treap:KeepSmallest (orange) in between.
Towards Computational Performance Engineering for Unsupervised Concept Drift Detection: Complexities, Benchmarking, Performance
Analysis
325

Figure 4: Vampir display of the IKS DD with timeline feature, i.e. chronological sequence of the called functions. We
selected the time window to show the called functions of the IKS per sample, i.e. between inference steps (yellow).
The top display shows the master timeline and the bottom display the call stack. Treap.SplitKeepRight is light green,
Treap.KeepGreatest cyan, Treap.KeepSmallest orange, Treap.Merge dark blue and other Treap functions are purple.
IKS:Add consists of additional merges.
Therefore, we conclude that IKS mostly relies
on the internal data representation. The resource-
efficient and potentially parallel implementation of
maintaining this representation is the key to a low
runtime overhead. While we did not perform an in-
depth performance analysis of IKS and STUDD, we
still show the effectiveness of such investigations for
DDs. Further analysis should follow to support the
development of resource-efficient scalable DDs.
5 CONCLUSION
This work contributes to computational performance
engineering for unsupervised DDs by discussing
computational complexities, a comprehensive bench-
mark, and an initial performance analysis of two DDs.
We show the necessity of such investigation by high-
lighting the gap in the prior evaluation and demon-
strating a high runtime of two DDs on a larger dataset.
Although time and space complexities alone are not
enough for comprehensive performance engineering,
they are an important pillar for such investigations.
Thus, we determined them for existing approaches.
The complexities can be reflected in a benchmark that
takes into account the important aspects we have dis-
cussed, i.e. diversity of datasets, model dependencies,
baselines, and the set of metrics. Performance anal-
ysis provides in-depth insights into application be-
haviors and supports the development of resource-
efficient and parallel DDs. We provide an initial anal-
ysis with the tools Score-P and Vampir to reveal po-
tential bottlenecks in the implementations of two DD.
For future work, we plan to extend our com-
plexity analysis and substantiate the determined time
and space complexities with empirical measurements.
Moreover, we want to provide a comprehensive
benchmark of unsupervised DDs reflecting the com-
putational performance and inference quality. Us-
ing gained insights, we aim to develop parallel and
resource-efficient solutions for diverse applications.
ACKNOWLEDGMENT
The authors gratefully acknowledge the computing
time made available to them on the high-performance
computer at the NHR Center of TU Dresden. This
center is jointly supported by the Federal Ministry
of Education and Research and the state governments
participating in the NHR (www.nhr-verein.de/unsere-
partner).
REFERENCES
Agrawal, R., Imielinski, T., and Swami, A. (1993).
Database mining: A performance perspective. IEEE
TKDE, 5(6):914–925.
Barros, R. S. M. and Santos, S. G. T. C. (2018). A large-
scale comparison of concept drift detectors. Informa-
tion Sciences, 451:348–370.
Bifet, A., Holmes, G., Pfahringer, B., Kranen, P., Kremer,
H., Jansen, T., and Seidl, T. (2010). Moa: Massive
online analysis, a framework for stream classification
and clustering. In Proc. 1st Workshop on Applications
of Pattern Analysis, pages 44–50. PMLR.
Blackard, J. A. and Dean, D. J. (1999). Comparative ac-
curacies of artificial neural networks and discriminant
analysis in predicting forest cover types from carto-
graphic variables. Computers and Electronics in Agri-
culture, 24(3):131–151.
Cerqueira, V., Gomes, H., Bifet, A., and Torgo, L. (2022).
Studd: a student–teacher method for unsupervised
concept drift detection. Machine Learning, pages 1–
28.
Dasu, T., Krishnan, S., Venkatasubramanian, S., and Yi,
K. (2006). An information-theoretic approach to de-
tecting changes in multi-dimensional data streams. In
Proc. Symp. Interface.
de Mello, R. F., Vaz, Y., Grossi, C. H., and Bifet, A. (2019).
On learning guarantees to unsupervised concept drift
DATA 2024 - 13th International Conference on Data Science, Technology and Applications
326

detection on data streams. Expert Systems with Appli-
cations, 117:90–102.
Ditzler, G. and Polikar, R. (2011). Hellinger distance based
drift detection for nonstationary environments. In
IEEE Symp. CIDUE, pages 41–48. IEEE.
dos Reis, D. M., Flach, P., Matwin, S., and Batista, G.
(2016). Fast unsupervised online drift detection using
incremental kolmogorov-smirnov test. In Proc. 22nd
ACM SIGKDD Int. Conf. KDD, pages 1545–1554.
Gama, J.,
ˇ
Zliobait
˙
e, I., Bifet, A., Pechenizkiy, M., and
Bouchachia, A. (2014). A survey on concept drift
adaptation. ACM computing surveys, 46(4):1–37.
Gemaque, R. N., Costa, A. F. J., Giusti, R., and Santos,
E. M. D. (2020). An overview of unsupervised drift
detection methods. Wiley Interdisciplinary Reviews:
Data Mining and Knowledge Discovery, 10(6):e1381.
Gocht, A., Sch
¨
one, R., and Frenzel, J. (2021). Advanced
python performance monitoring with score-p. In Tools
for High Performance Computing, pages 261–270.
Springer.
G
¨
oz
¨
uac¸ık,
¨
O., B
¨
uy
¨
ukc¸akır, A., Bonab, H., and Can, F.
(2019). Unsupervised concept drift detection with a
discriminative classifier. In Proc. 28th ACM Int. Conf.
CIKM, pages 2365–2368.
G
¨
oz
¨
uac¸ık,
¨
O. and Can, F. (2021). Concept learning us-
ing one-class classifiers for implicit drift detection in
evolving data streams. Artificial Intelligence Review,
54:3725–3747.
Greco, S. and Cerquitelli, T. (2021). Drift lens: Real-
time unsupervised concept drift detection by evaluat-
ing per-label embedding distributions. In Proc. IEEE
Int. Conf. ICDMW, pages 341–349. IEEE.
Grubitzsch, P., Werner, E., Matusek, D., Stojanov, V., and
H
¨
ahnel, M. (2021). Ai-based transport mode recogni-
tion for transportation planning utilizing smartphone
sensor data from crowdsensing campaigns. In Proc.
IEEE 24th Int. Conf. ITSC, pages 1306–1313. IEEE.
Gu, F., Zhang, G., Lu, J., and Lin, C. (2016). Concept drift
detection based on equal density estimation. In Proc.
Int. Conf. IJCNN, pages 24–30. IEEE.
Haque, A., Khan, L., and M. Baron, B. Thuraisingham,
C. A. (2016). Efficient handling of concept drift and
concept evolution over stream data. In Proc. IEEE
32nd Int. Conf. ICDE, pages 481–492. IEEE.
Harries, M., Wales, N. S., et al. (1999). Splice-2 compara-
tive evaluation: Electricity pricing.
Hawkins, D. M. (2004). The problem of overfitting. Jour-
nal of chemical information and computer sciences,
44(1):1–12.
Hoens, T. R., Polikar, R., and Chawla, N. V. (2012). Learn-
ing from streaming data with concept drift and imbal-
ance: an overview. Progress in Artificial Intelligence,
1:89–101.
Hulten, G., Spencer, L., and Domingos, P. (2001). Min-
ing time-changing data streams. In Proc. 7th ACM
SIGKDD Int. Conf. KDD, pages 97–106.
Ikonomovska, E., Gama, J., and D
ˇ
zeroski, S. (2011). Learn-
ing model trees from evolving data streams. Data
Mining and Knowledge Discovery, 23:128–168.
Jin, G., Song, L., Shi, X., Scherpelz, J., and Lu, S. (2012).
Understanding and detecting real-world performance
bugs. ACM SIGPLAN Notices, 47(6):77–88.
Kifer, D., Ben-David, S., and Gehrke, J. (2004). Detecting
change in data streams. In Proc. 30th Int. Conf VLDB,
volume 4, pages 180–191. Toronto, Canada.
Kim, Y. and Park, C. H. (2017). An efficient concept drift
detection method for streaming data under limited la-
beling. IEICE Transactions on Information and sys-
tems, 100(10):2537–2546.
Kn
¨
upfer, A., Brunst, H., Doleschal, J., Jurenz, M., Lieber,
M., Mickler, H., M
¨
uller, M. S., and Nagel, W. E.
(2008). The vampir performance analysis tool-set. In
Resch, M., Keller, R., Himmler, V., Krammer, B., and
Schulz, A., editors, Tools for High Performance Com-
puting, pages 139–155. Springer Berlin Heidelberg.
Kn
¨
upfer, A., R
¨
ossel, C., Mey, D., Biersdorff, S., Diethelm,
K., Eschweiler, D., Geimer, M., Gerndt, M., Lorenz,
D., Malony, A., et al. (2012). Score-p: A joint
performance measurement run-time infrastructure for
periscope, scalasca, tau, and vampir. In Proc. 5th Int.
Workshop on Parallel Tools for HPC, pages 79–91.
Springer.
Kumar, N.,
ˇ
Segvi
´
c, S., Eslami, A., and Gumhold, S. (2023).
Normalizing flow based feature synthesis for outlier-
aware object detection. In Proc. IEEE Conf. CVPR,
pages 5156–5165.
Langenk
¨
amper, D., Kevelaer, R. V., Purser, A., and Nat-
tkemper, T. W. (2020). Gear-induced concept drift in
marine images and its effect on deep learning classifi-
cation. Frontiers in Marine Science, 7:506.
Leskovec, J., Lang, K. J., Dasgupta, A., and Mahoney,
M. W. (2009). Community structure in large net-
works: Natural cluster sizes and the absence of large
well-defined clusters. Internet Mathematics, 6(1):29–
123.
Liu, A., J.Lu, Liu, F., and Zhang, G. (2018). Accumulat-
ing regional density dissimilarity for concept drift de-
tection in data streams. Pattern Recognition, 76:256–
272.
Liu, A., Song, Y., Zhang, G., and Lu, J. (2017). Regional
concept drift detection and density synchronized drift
adaptation. In Proc. 26th Int. Conf. IJCAI.
Lu, N., Zhang, G., and Lu, J. (2014). Concept drift detec-
tion via competence models. Artificial Intelligence,
209:11–28.
Lughofer, E., Weigl, E., Heidl, W., Eitzinger, C., and
Radauer, T. (2016). Recognizing input space and tar-
get concept drifts in data streams with scarcely la-
beled and unlabelled instances. Information Sciences,
355:127–151.
Lukats, D. and Stahl, F. (2023). On reproducible implemen-
tations in unsupervised concept drift detection algo-
rithms research. In Proc. 43rd Int. Conf. SGAI, pages
204–209. Springer.
Mahgoub, M., Moharram, H., Elkafrawy, P., and Awad, A.
(2022). Benchmarking concept drift detectors for on-
line machine learning. In Proc. 11th Int. Conf. MEDI,
pages 43–57. Springer.
Towards Computational Performance Engineering for Unsupervised Concept Drift Detection: Complexities, Benchmarking, Performance
Analysis
327

Martinez, I., Viles, E., and Cabrejas, I. (2018). Labelling
drifts in a fault detection system for wind turbine
maintenance. In Proc. Conf. IDC XII, pages 145–156.
Springer.
Mattson, P., Cheng, C., Diamos, G., Coleman, C., Micike-
vicius, P., Patterson, D., Tang, H., Wei, G., Bailis, P.,
Bittorf, V., et al. (2020). Mlperf training benchmark.
volume 2, pages 336–349.
McAuley, J. J. and Leskovec, J. (2013). From amateurs to
connoisseurs: modeling the evolution of user exper-
tise through online reviews. In Proc. 22nd Int. Conf.
WWW, pages 897–908.
Mustafa, A. M., Ayoade, G., Al-Naami, K. W., Khan,
L., Hamlen, K., Thuraisingham, B., and Araujo, F.
(2017). Unsupervised deep embedding for novel class
detection over data stream. In Proc. IEEE Int. Conf.
Big Data, pages 1830–1839. IEEE.
Nguyen, A., Yosinski, J., and Clune, J. (2015). Deep neural
networks are easily fooled: High confidence predic-
tions for unrecognizable images. In Proc. IEEE Conf.
CVPR, pages 427–436.
Palli, A. S., Jaafar, J., Gomes, H. M., Hashmani, M. A.,
and Gilal, A. R. (2022). An experimental analysis
of drift detection methods on multi-class imbalanced
data streams. Applied Sciences, 12(22):11688.
Pinag’e, F., dos Santos, E. M., and Gama, J. (2020). A drift
detection method based on dynamic classifier selec-
tion. Data Mining and Knowledge Discovery, 34:50–
74.
Qahtan, A. A., Alharbi, B., Wang, S., and Zhang, X. (2015).
A pca-based change detection framework for multidi-
mensional data streams: Change detection in multidi-
mensional data streams. In Proc. 21st ACM SIGKDD
Int. Conf. KDD, pages 935–944.
Reinsel, D., Gantz, J., and Rydning, J. (2018). Data age
2025: the digitization of the world from edge to core.
Seagate.
Sethi, T. S. and Kantardzic, M. (2017). On the reliable de-
tection of concept drift from streaming unlabeled data.
Expert Systems with Applications, 82:77–99.
Shen, P., Ming, Y., Li, H., Gao, J., and Zhang, W. (2023).
Unsupervised concept drift detectors: A survey. In
Proc. 18th Int. Conf. ICNC-FSKD, pages 1117–1124.
Springer.
Song, X., Wu, M., Jermaine, C., and Ranka, S. (2007). Sta-
tistical change detection for multi-dimensional data.
In Proc. 13th ACM SIGKDD Int. Conf. KDD, pages
667–676.
Souza, V. M. A., dos Reis, D. M., Maletzke, A. G., and
Batista, G. E. (2020). Challenges in benchmarking
stream learning algorithms with real-world data. Data
Mining and Knowledge Discovery, 34:1805–1858.
Souza, V. M. A., Parmezan, A. R. S., Chowdhury, F. A.,
Mueen, A., and Abdullah (2021). Efficient unsu-
pervised drift detector for fast and high-dimensional
data streams. Knowledge and Information Systems,
63:1497–1527.
Vergara, A., Shankar, V., Ayhan, T., Ryan, M. A., Homer,
M. L., and Huerta, R. (2012). Chemical gas sensor
drift compensation using classifier ensembles. Sen-
sors and Actuators B: Chemical, 166-167:320–329.
Webb, G., Hyde, R., Cao, H., Nguyen, H., and Petitjean,
F. (2016). Characterizing concept drift. Data Mining
and Knowledge Discovery, 30(4):964–994.
Werner, E., Manjunath, L., Frenzel, J., and Torge, S. (2021).
Bridging between data science and performance anal-
ysis: tracing of jupyter notebooks. In Proc. 1st Int.
Conf. AIMLSys, pages 1–7.
Wu, O., Koh, Y. S., Dobbie, G., and Lacombe, T. (2021).
Nacre: Proactive recurrent concept drift detection in
data streams. In Proc. Int. Conf. IJCNN, pages 1–8.
IEEE.
Xuan, J., Lu, J., and Zhang, G. (2020). Bayesian nonpara-
metric unsupervised concept drift detection for data
stream mining. ACM TIST, 12(1):1–22.
Zheng, S., Zon, S., Pechenizkiy, M., Campos, C., Ipenburg,
W., and Harder, H. (2019). Labelless concept drift
detection and explanation. In Proc. Workshop Robust
AI in FS.
APPENDIX
We justify the determined time and space complexi-
ties. All approaches refer to at least two parameters:
w - window size (number of examined data points)
and d - number of data dimensions per data point.
KL (Dasu et al., 2006) δ - minimum value for the
property box length of their internal data representa-
tion kdq-tree State the time and space complexity
in the publication.
PR (Gu et al., 2016) State the time complexity
of their approach in the publication. For the space
complexity, they store w instances with d features, i.e.
O(w ∗d)
CD (Qahtan et al., 2015) Even not mentioned ex-
plicitly in their publication, processing a sample relies
on the data dimensionality d since the projection of a
data point onto the PCs is done in O(d ×k), where
k is the number of PCs describing 99.9% of the vari-
ance and k can be considered as a constant. For drift,
they report O(d
2
×w). Space complexity for the PCs
with a fixed k is O(d) and O(w) due to the projection
of the data points in the reference window on a fixed
number of PCs, i.e. O(w + d).
NM-DDM (Mustafa et al., 2017) b - number of
bins of estimated histogram State the time com-
plexity of their approach in the publication. For the
space complexity, b number of bin values in each of
the histograms for the d features are stored, i.e. d ∗b.
HDDDM (Ditzler and Polikar, 2011) Originally
HDDDM was proposed as a batch-based approach.
To apply it incrementally on each sample, we as-
sume a naive procedure: we introduce an initialization
DATA 2024 - 13th International Conference on Data Science, Technology and Applications
328

phase over the first samples S
i
with i = 1, 2, ...w and
initialize D
λ
= D
w
= S
1
, ...S
w
. For each new sample
S
t
and t = w +1, w +2, ..., we initialize D
t
= D
t−1
∪S
t
S
t−w
to create a sliding window of size w. Now, we
apply the HDDDM as usual.
Drift detection is performed by Hellinger dis-
tances between two histograms based on S
λ
and S
t
.
The histograms have ⌊
√
w⌋ bins and the main com-
putational complexity is in the Hellinger distance be-
tween these two histograms, i.e. O(⌊
√
w⌋× d) to
compute the intermediate distances per bin of each
feature, resulting in the final Hellinger distance. For
space complexity, only the histograms must be kept
in memory, i.e. O(⌊
√
w⌋×d).
IKS (dos Reis et al., 2016) State the time com-
plexity of their approach in the publication. For the
space complexity, they store w instances with d fea-
tures, i.e. O(w ∗d)
BNDM (Xuan et al., 2020) State the time com-
plexity of their approach in the publication. For the
space complexity, they store w instances with d fea-
tures, i.e. O(w ∗d)
ECHO (Haque et al., 2016) State the time and
space complexity of their approach in the publication.
OMV-PHT (Lughofer et al., 2016) b - number
of bins of estimated histogram Propose an exten-
sion of the Page-Hinkley test by only considering de-
teriorations of the quality indicator (e.g. accuracy)
and fading older samples for computing the quality
indicator. Besides a supervised quality indicator, they
propose a semi-supervised one, that relies on active
user feedback, and an unsupervised quality indica-
tor which is considered in this study. To determine
the quality of a model, they build histograms over the
model confidence values during inference. Next, they
compare the histograms of two windows by iterating
over the bins, i.e. O(b), and apply their faded Page-
Hinkley test in O(w) since the fading of older samples
needs to be re-computed. An update of the histograms
can be done per sample in O(1). Therefore, the over-
all time complexity is O(w + b). Space complexity is
O(w + b) to store the confidence histogram and the w
magnitude values for the OMV-PHT test.
DbDDA (Kim and Park, 2017) Calculates mean
and standard deviation for a reference and detection
window of size w over the confidences of the ML
model in the inference. Mean and standard deviation
are computed iteratively in O(1) per dimension with
space complexity O(w) to store all confidences. The
reference window is either fixed or moving for Db-
DDA. For the ensemble case, multiple reference win-
dows are kept, and mean and standard deviation are
considered w.r.t. this ensemble, i.e. time complexity
O(e) and space complexity O(e ∗w).
CM (Lu et al., 2014) State the time complexity
of their approach in the publication. For the space
complexity, they store w instances with d features, i.e.
O(w ∗d).
Towards Computational Performance Engineering for Unsupervised Concept Drift Detection: Complexities, Benchmarking, Performance
Analysis
329
