
Influential Factors on Drivetrain Consumption in Electric City Buses and
Assessing the Optimization Potentials
Sunilkumar Raghuraman
1,2 a
, Daniel Baumann
2 b
, Marc Schindewolf
2 c
and Eric Sax
2 d
1
Daimler Busses, Mannheim, Germany
2
Karlsruhe Institute of Technology, Karlsruhe, Germany
Keywords:
Electric City Bus, Drivetrain Energy Consumption, Influencing Factors, Drive Style Analysis, Clustering.
Abstract:
In response to the growing need for sustainable mobility amidst global challenges like climate change and
urbanization, ensuring energy-efficient operation of Electric City Buses (ECBs) is crucial. This study initially
utilizes techniques associated with explainable artificial intelligence, such as SHapley Additive ExPlanations
(SHAP), to determine the impact of various factors such as vehicle speed, acceleration, braking on drive-
train consumption. The data is categorized into distinct scenarios such as acceleration, starting, curve, uphill
and downhill for this analysis. In driving scenarios such as curves, uphill, or downhill, the position of the
brake pedal, along with the accelerator pedal and vehicle speed, were identified as significant factors affecting
drivetrain consumption. Secondly, the study delves into analyzing driving behavior during bus stop entries,
employing methods like Deep Autoencoder-based Clustering (DAC) and Self-Organizing Map (SOM). In the
results of the DAC and SOM analysis, it was found that Cluster 2, identified through the DAC model, ex-
hibited substantial energy consumption, characterized by higher acceleration and lesser brake pedal usage.
Conversely, the SOM analysis showed that the orange and blue clusters have greater energy efficiency, with
a higher distance covered and lower energy consumption, contrasting with other clusters that consumed more
energy for reaching the busstop.
1 INTRODUCTION
Given the challenges posed by global warming, pop-
ulation growth, and urbanization, the automotive
industry faces mounting demands to foster more
sustainable mobility. Electrifying vehicles offer a
promising solution to mitigate greenhouse gas emis-
sions in transportation. An increasing shift can also be
observed in public transportation, where diesel-fueled
buses are being replaced by electric city buses (ECB)
(Mahmoud et al., 2016). ECBs now account for up to
4% of all new bus registrations in Europe, where elec-
tric bus registrations have been rising steadily since
2016 (IEA, 2021). In 2021, for the first time, three
European countries registered more than 500 e-buses,
with Germany leading the way with 581 units, fol-
lowed by the UK with 540 units and France with 512
(SustainableBus, 2023). By 2022, nearly 66,000 elec-
a
https://orcid.org/0009-0001-5929-9567
b
https://orcid.org/0009-0004-4270-3713
c
https://orcid.org/0000-0002-2638-4861
d
https://orcid.org/0000-0003-2567-2340
tric buses and 60,000 medium and heavy-duty trucks
will have been sold worldwide, representing about
4.5% of all bus sales and 1.2% of truck sales world-
wide (IEA, 2023). At the same time, the transport
companies already have concrete plans to produce
around 6,600 more e-buses by 2030.
The energy consumption of an ECB consists of
many components, namely drivetrain, heating, venti-
lation and air conditioning (HVAC), 24V Auxiliary,
and Air compressor. The top two consumers are the
drivetrain and HVAC (R
¨
osch et al., 2023). An es-
sential aspect of energy consumption estimation is
considering the impact of driver’s range anxiety, par-
ticularly the avoidance of driving with minimal en-
ergy remaining in the battery. It is important to note
that the actual energy consumption of electric buses
varies considerably depending on factors which are
not directly controllable or alterable, such as pas-
senger load, weather and traffic conditions However,
driving style, which can be adjusted and optimized,
offers an avenue to improve energy efficiency in elec-
tric buses. Utilizing the real world fleet data helps
in identifying possibilities for energy efficient oper-
330
Raghuraman, S., Baumann, D., Schindewolf, M. and Sax, E.
Influential Factors on Drivetrain Consumption in Electric City Buses and Assessing the Optimization Potentials.
DOI: 10.5220/0012758700003756
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 13th International Conference on Data Science, Technology and Applications (DATA 2024), pages 330-337
ISBN: 978-989-758-707-8; ISSN: 2184-285X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

ation for the top consumers such as drivetrain and
HVAC (Sommer et al., 2023).
This research paper aims to investigate the various
factors that impact drivetrain consumption in electric
city buses and explore the opportunities for optimiz-
ing energy efficiency. By analyzing real-world data,
and considering relevant parameters, this work aim to
provide valuable insights into the key determinants of
drivetrain consumption in ECBs. Furthermore, this
study will assess how different driving styles, partic-
ularly scenarios like bus stop approaches, influence
drivetrain efficiency. By examining these interactions,
we aim to identify strategies for optimizing drivetrain
performance in electric city buses.
2 BACKGROUND
2.1 Explainable Artificial Intelligence
Explainable Artificial Intelligence (XAI) aims to en-
hance the transparency of AI systems, moving away
from opaque ”black box” models towards algorithms
that provide interpretable insights into decision-
making processes. XAI seeks to make AI systems
clearer and more trustworthy by offering explicit ex-
planations that outline their capabilities, limitations,
and behaviors in unfamiliar situations.The SHAP
method (SHapley Additive ExPlanations), rooted in
cooperative game theory and specifically Shapley val-
ues, measures the impact of each input feature on
a model’s prediction. It calculates Shapley values
by considering all possible combinations of features,
assessing their effect on the prediction. These val-
ues highlight the importance of each feature, with
positive values indicating beneficial contributions and
negative ones showing negative effects (Lundberg and
Lee, 2017).
2.2 Deep Autoencoder-Based Clustering
Deep Autoencoder-based Clustering (DAC) (Lu and
Li, 2021) is a generalized data-driven framework to
learn to cluster representations using deep neuron net-
works. The methodology described in the study by Lu
et al. involve training a deep autoencoder, consisting
of an encoder and a decoder, using a provided training
set. They initiated the process with a flattened input
vector fed into a three-layer deep encoder, which is
crucial for obtaining a low-dimensional learned repre-
sentation. This representation was then reconstructed
to its original dimensions by the decoder. Once their
auto-encoder was adequately trained, it was used to
produce a low-dimensional representation of the input
data, which was then employed as input for the K-
Means clustering algorithm to establish the required
clusters in the data.
2.3 Self-Organizing Map
Kohonen’s SOM (Kohonen, 1990) algorithm was em-
ployed in this study to model the dataset. It is an ar-
tificial neural network algorithm that operates on the
principles of competitive learning. In SOM, an initial
grid of neurons is established, each initialized with
random vectors matching the input data’s dimensions.
During training, input data points are presented ran-
domly to these neurons, with each neuron competing
to become the Best Match Unit (BMU) by calculat-
ing its distance to the input. The BMU and its neigh-
boring neurons adjust their codebook vectors based
on a learning function. This process is repeated over
the entire training set, resulting in centroids dispersed
throughout the data space. After training, the nodes
can be visualized in a grid structure, that helps in un-
derstanding the relationships and patterns.
3 RELATED WORK
Although ECB are environmental-friendly and able to
benefit the development of a sustainable urban tran-
sit system, an important concern is energy consump-
tion estimation that relates to driver’s range anxi-
ety—avoid driving with little energy remaining in the
battery. In recent years, numerous researches have
focused on developing more energy-efficient driving
styles (Zhang et al., 2019; Kivek
¨
as et al., 2019; He
et al., 2021) and assistance systems to enhance the
performance of an ECB. In a simulation study, a two-
part strategy was developed in determining an optimal
velocity interval (30-40 km/h) and an energy-saving
acceleration mode, which resulted in a reduction of
energy consumption by 2.47% overall in a bus trip
in the simulation (Zhang et al., 2019). On the other
hand, in this study efficient design choices were sug-
gested to reduce the energy consumption (Kivek
¨
as
et al., 2019).
ECB’s energy consumption is influenced by sev-
eral factors, including road geometry, land use,
weather, and vehicle conditions, as well as the driving
behavior. Although vehicle conditions, weather, land
use, and road geometry are typically constant factors
within a predefined bus route, the driving style can
vary among different drivers.
Predicting the energy consumption or determin-
ing the influencing factors are divided into two types,
named as macroscopic and microscopic approaches
Influential Factors on Drivetrain Consumption in Electric City Buses and Assessing the Optimization Potentials
331

(Chen et al., 2021). The macroscopic approach fo-
cuses on developing models that predict energy con-
sumption for longer distances of operation (Varga
et al., 2019; Zhang et al., 2020; Thorgeirsson et al.,
2021). It aims to estimate the overall energy con-
sumption of an electric vehicle for the whole trip of
operation. Additionally, this approach is utilized to
predict the remaining range that will be covered by
the vehicle, providing valuable information for plan-
ning and optimization. These studies have utilized
influential factors, related to vehicle design, driver-
related parameters, and environmental conditions as
well.
The microscopic approach primarily focuses on
the prediction of instantaneous energy consumption,
which deals with second by second basis of the con-
sumption (Zhang and Yao, 2015; De Cauwer et al.,
2017; Beckers et al., 2020). This methodology also
incorporates a wide array of factors, including driv-
ing conditions, vehicle speed, acceleration, and the
activation of auxiliary systems. By taking these vari-
ables into consideration, the microscopic approach
offers insights into the energy consumption patterns
and dynamics exhibited by electric vehicles during
their real-time operation.
4 METHODOLOGY
The methodology adopted in this study is structured
into two distinct phases. The initial phase focuses on
identifying the factors that significantly impact driv-
etrain consumption, specifically in certain scenarios.
Subsequently, the second phase analyzes the driving
behavior and consumption patterns as buses approach
and enter the bus stops.
To determine the main influencing factors for the
power consumption in the bus, a 1D-Convolutional
Neural Network model (cf. (Kiranyaz et al., 2021))
was trained to predict the energy consumption for the
next time step from various input signals. The trained
model was then analyzed using SHAP to extract the
various influencing factors on the drivetrain energy
consumption (cf.Figure 1).
Figure 1: Workflow of getting the influencing factors of the
drivetrain.
Table 1: Criteria for the seven scenarios to identify the in-
fluencing factors of the drivetrain.
Scenario
Group
Acceleration
x-Direction
Acceleration
y-Direction
Height Difference
Brake Pedal
Accelerator Pedal
Vehicle Speed
[m/s
2
] [m/s
2
] [m] [%] [%] [km/h]
Acc 1 > 0.2 > 0.01 < 15
Starting 1 > 0 < 5 > 0.01 < 15
Curve 2 > 0.7 > 5
Uphill 2 > 0.01 > 0.00
Downhill 2 < −0.01 > 0.01
The pipeline, we used to prepare the data and train
the model, is based on the CRISP-DM process (Wirth
and Hipp, 2000). The data used for the training and
prediction are measurement data collected utilizing
onboard data collectors installed in electric city buses.
In the data preparation stage, the dataset was parti-
tioned into separate subsets for subsequent analysis,
and individual trips within the time series data were
identified by utilizing GPS coordinates of the depot
location. This identification was crucial for isolating
discrete journey segments, subsequently leading to a
comprehensive feature selection process. The rele-
vant features were selected, removing highly corre-
lated signals and signals irrelevant to get the influenc-
ing factors of the drivetrain. We trained a model with
the following input features to predict the drivetrain
energy consumption:
• Brake torque
• Ignition state
• Total distance
• Speed
• Brake pedal
• Accelerator pedal
• Vehicle weight
• Remaining range
• Cruise control
• Current gear
• Air temperature inside
• Air temperature outside
• Steering wheel
• Battery voltage
• Retarder level
• Current energy consumption
• Battery isolation resistance
• Road level
• Inverter 1/2 power
• Low voltage output power
• Acceleration in x/y
• left/right turn signal
• Actual high voltage power
• Brake system malfunction
• Stop request
• Horn
The last 5 seconds were used as the time window for
the input signals. The label value for the model is
the current power value of the drivetrain consump-
tion. Considering the whole dataset, 70% of the data
is used as training, 20% is used for validation, and
10% is used for testing the model. Before training the
model, the different windows of the training data were
balanced.In doing so, the naturally underrepresented
(very high and very low values cf. Figure 2 orange)
energy consumption is oversampled; for this purpose,
DATA 2024 - 13th International Conference on Data Science, Technology and Applications
332

the underrepresented data samples are repeated in the
data (cf. Figure 2 blue). Thereby an equal distribution
of the training windows across all energy consump-
tion is achieved (cf. Figure 2).
Figure 2: Histogram of the Train (before and after oversam-
pling), Test and Validation Data.
For the explanation of the evaluation step, the data
has been categorized into five scenarios to determine
the influencing factors and to avoid comparing dis-
similar situations (cf. Table 1). In this study, we have
organized the scenarios into two groups to facilitate a
clearer presentation of results (cf. Table 1). The sce-
narios of the first group differ essentially in the initial
speed of the vehicles. Whereby the scenarios of the
second group only differ in their form of driving.
For each of the five scenarios, heatmaps based on
GPS coordinates were generated to identify locations
with frequent occurrences. The five locations with the
highest concentration of data points were further in-
vestigated. Data from these locations were processed
and aggregated into separate datasets for each sce-
nario. These datasets were then analyzed using SHAP
values to identify key influencing factors.
In the second phase of the driving behavior anal-
ysis, focused on bus stop entry. Initially, timestamps
for entering bus stops are determined after a trip re-
duction phase using specific signals such as GPS co-
ordinates, vehicle speed, and door status. These sig-
nals serve as key criteria for identifying instances
where the vehicle halts at a bus stop. Instances where
the vehicle speed reaches zero and the door status
opens at the GPS locations are isolated for further ex-
amination.
Subsequently, an extensive set of features is ex-
tracted for analysis purposes, which are categorized
into two types, as detailed in Table 2. They form a
vector of twenty seconds capturing time-based com-
ponents indicating different aspects of driving behav-
ior. This results in a high-dimensional feature rep-
resentation that offers a comprehensive insight into
driving behavior during bus stop entry. Using these
feature vectors, two distinct clustering techniques,
DAC and SOM, are employed.
Table 2: Features used for clustering + identifying bus
stops.
Method Feature Unit Type
Identifying bus stop
Door status
Latitude degrees
Longitude degrees
Clustering
Velocity m/s Vector of 20
Acc. Pedal % Vector of 20
Brake Pedal % Vector of 20
Drivetrain Energy kWh Scalar
Distance Traveled km Scalar
In this study, we employed the Supersom method-
ology to organize input variables into layers with as-
signed weights. Data on velocity, acceleration, and
brake pedal usage were segmented into vectors rep-
resenting twenty-second intervals, while distance and
energy per kilometer were treated as scalars in a sepa-
rate layer. The trained Supersom created a map where
each maneuver was represented by a hexagon. These
hexagons were then used as inputs for the K-means
clustering algorithm to determine clustering results,
assessing the optimal cluster number by analyzing
the elbow point in the within-cluster sum of squares
(within
ss
) from 2 to 20 clusters. The ”kohonen” pack-
age was utilized to visualize the SOM model, present-
ing one layer of the codebook vectors at a time.
5 RESULTS AND DISCUSSION
5.1 Influential Factors of the Drivetrain
Energy Consumption
Our research aims to comprehensively understand and
analyze the factors that influence drivetrain energy
consumption. To achieve this, we employ SHAP val-
ues as a powerful tool for feature attribution.
As Group 1 only differ in the initial speed of the
vehicle, the influencing factors of the two scenarios
only differ slightly. The two main factors influencing
the drive energy are the acceleration pedal and vehi-
cle speed (cf. Figure 3). The Figure shows the mean
values of the absolute Shap values for a GPS position
in the starting scenario for the respective influencing
factors.The energy requirement increases with higher
speeds and higher acceleration. Therefore, it is nec-
essary to allocate more power resources to sustain ac-
celeration and maintain the desired velocity.
As Group 2 describes situations in which the ve-
hicle is driving, the most influencing factors for the
drivetrain energy are similar to Group 1, the acceler-
Influential Factors on Drivetrain Consumption in Electric City Buses and Assessing the Optimization Potentials
333
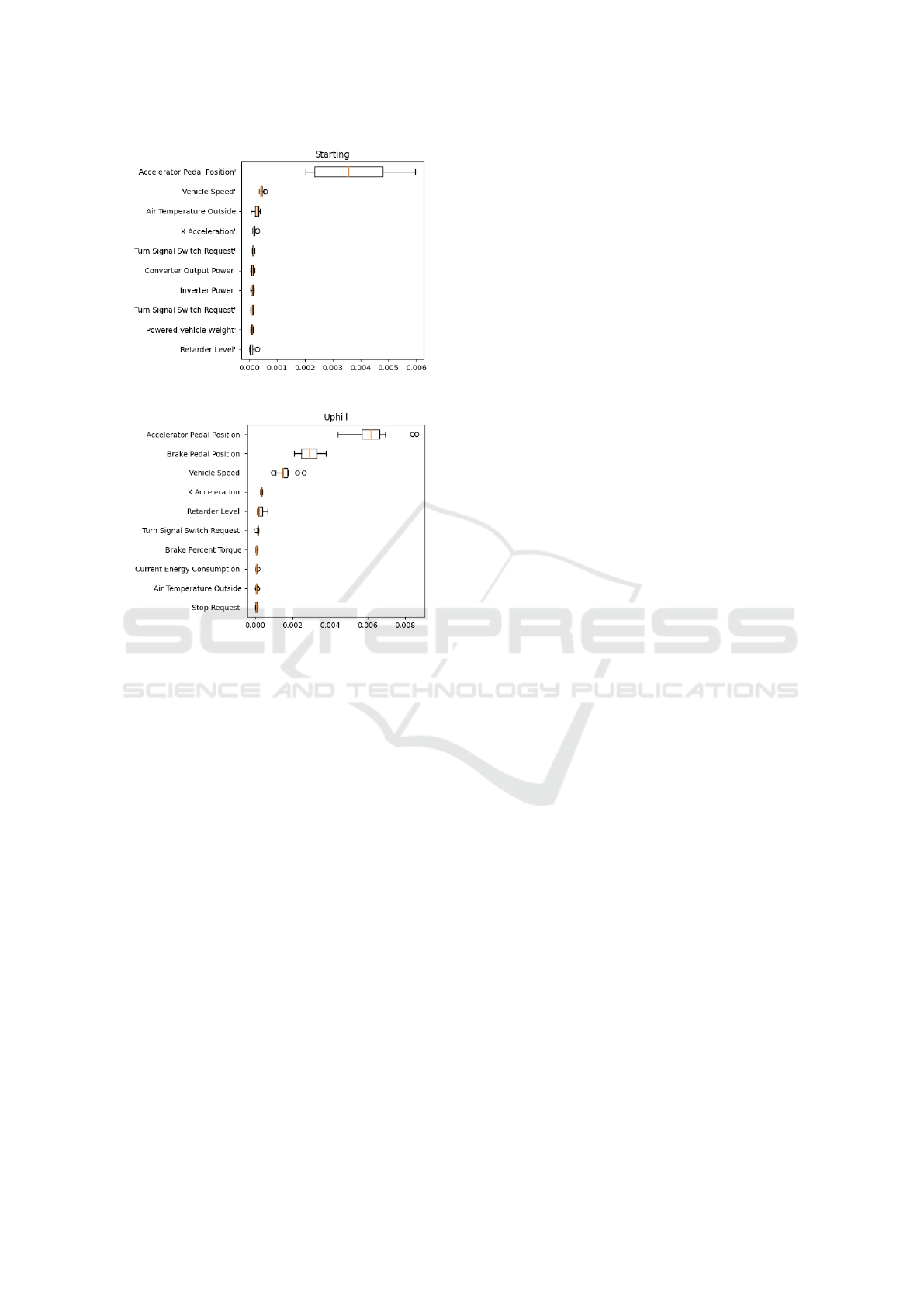
Figure 3: Top ten factors in the starting scenario.
Figure 4: Top ten factors in the Uphill scenario.
ator and brake pedal position as well as the vehicle
speed. These parameters can be explained physically,
e.g. the increased driving resistance at higher speeds
(cf. Figure 4). Firstly, the position of the accelerator
pedal remains a critical determinant. The degree to
which the accelerator is pressed directly impacts the
amount of energy delivered to the drivetrain, influenc-
ing the vehicle’s speed and acceleration.
Secondly, the brake pedal position plays a cru-
cial role in the energy dynamics of the drivetrain.
When the brake pedal is engaged, it signifies a reduc-
tion in the vehicle’s speed. Conversely, releasing the
brake pedal allows for the restart of the energy flow,
facilitating acceleration. Thirdly, the vehicle speed
emerges as another pivotal factor within this scenario
group. The speed at which the vehicle is traveling
is integrally linked to both the accelerator and brake
pedal actions. Higher speeds generally require more
energy to maintain. Besides the brake pedal, another
significant factor influencing drivetrain energy con-
sumption is the retarder, that is installed in the electri-
cal vehicle. In addition to the primary braking mech-
anism provided by the brake pedal, the retarder level
serves as an additional braking.
In addition to the top 10 parameters shown in Fig-
ure 3 and Figure 4, there are other parameters, that
influence the drivetrain energy. The battery voltage
also plays a role, since higher battery voltage results
in lower energy consumption due to reduced losses
from the lower currents required to meet the same
power demands when compared to lower voltage sit-
uations.
The remaining range also affects the drivetrain en-
ergy, as position seven in the acceleration scenario
and position 15 in the starting scenario. This may be
due to the fact that drivers tend to be more aware of
energy consumption when the remaining range is low.
In these situations, individuals are likely to pay closer
attention to their driving habits, adjusting their behav-
ior to optimize energy efficiency as they strive to max-
imize the remaining distance they can cover with the
available energy.
5.2 Bus Stop Based Cluster Analysis
The dataset spans January to December 2022 and in-
cludes around 45,000 instances of electric city buses
arriving at stops, sourced from ten buses across cities
with varying altitudes. The Analysis reveals an aver-
age speed of 20.89 km/h with a standard deviation of
9.02 km/h, showing significant speed variance. Ad-
ditionally, the mean positions of the acceleration and
brake pedals in the last twenty seconds reaching the
bus stop were found to be 18.69% (4.07-54.92%) and
14.03% (1.57-44.21%), respectively; notably, the ac-
celeration value of 54.92% appears to be an outlier.
Instances with more than 10 seconds of missing en-
ergy consumption data at any bus stop were excluded,
focusing the study on driving style and its impact on
energy consumption
5.2.1 Results of DAC
In the application of the DAC model, along with K-
means clustering, the data was segmented into three
distinct clusters, labeled as Cluster IDs 0, 1, and 2
(cf.Figure 5). In this clustering, Cluster 2 came as
the group with substantial energy consumption (Bad
Cluster), as evidenced by its higher drivetrain en-
ergy metrics per kilometer (Comparison with Cluster
0: 2.024 kWh/km higher, Cluster 1: 1.481 Kwh/km
higher). Conversely, Cluster 0 is recognized as a
cluster with reduced energy consumption, exhibit-
ing the least energy per kilometer with a negative
value among the clusters indicating more recuperation
(Good Cluster) (Comparison with Cluster 2: 2.024
kWh/km lower, Cluster 1: 0.543 Kwh/km lower).
Cluster 1 displays intermediate energy consumption,
higher than Cluster 0 but lower than Cluster 2 (Com-
parison with Cluster 0: 0.543 kWh/km higher, Cluster
DATA 2024 - 13th International Conference on Data Science, Technology and Applications
334
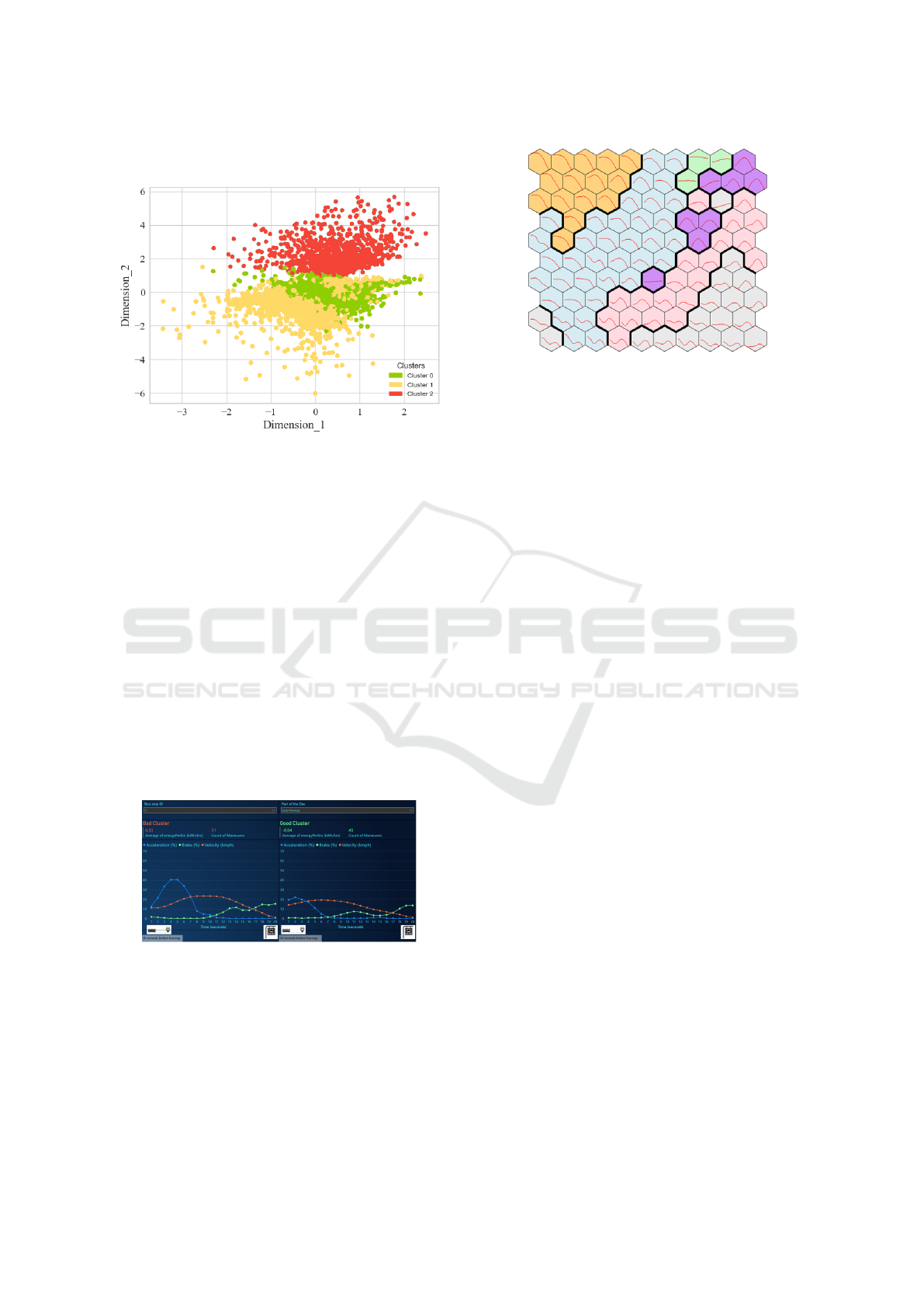
2: 1.481 Kwh/km lower).
Figure 5: Three clusters resulted from the DAC and Kmeans
clustering.
The high consumption cluster (Cluster 2), reveals
a pattern of lesser brake pedal usage coupled with
elevated acceleration values. This combination con-
tributes to increased energy consumption and dimin-
ished energy recuperation. Vehicles in this cluster
were noted to maintain lower speeds in previous time
instances, necessitating increased acceleration to ar-
rive at bus stops in a timely manner. This pattern is
observable not only during times of heavy traffic but
also during early morning and late-night hours in the
same bus stop in different time instances, as depicted
in cf.Figure 6 and indicated as the bad cluster (Cluster
2). Given that these periods typically witness reduced
traffic, the driving pattern may be more reflective of
individual driver behaviors or ignorance of the driver
to follow energy efficient driving than external traffic
conditions.
Figure 6: Driving style at early morning time period on dif-
ferent days at a specific bus stop.
Conversely, Cluster 0, which is characterized by
the lowest energy consumption per kilometer, shows
a different pattern in terms of brake and accelera-
tion. The average brake pedal usage in this cluster
is 69.75% higher than that in Cluster 2. Moreover,
the acceleration observed in Cluster 0 is consistently
lower compared to that in the high-consumption clus-
Figure 7: Code map for the vector layer Speed (kmph).
ter. Ultimately, the contrast between the clusters of-
fers insights into the diverse strategies drivers employ
and their impact on energy usage.
5.2.2 Results of SOM
The SOM analysis was conducted using a 10x10
hexagonal grid, resulting in a total of 100 hexagons.
Each hexagon in the code map corresponds to a
unique node in the SOM, depicting distinct driving
behaviors observed in the data. To determine the op-
timal clustering of these behaviors, an elbow curve
analysis was utilized, which identified six as the ideal
number of clusters. Therefore, the hexagons in the
code map have been color-coded into six different cat-
egories, each representing a cluster. Equal weighting
was assigned to all three vector layers and the singular
scalar layer during the training phase of the SOM.
Upon analyzing the velocity map in cf. Figure 7,
it was observed that in the orange and blue clusters,
there was a gradual decrease in speed over the twenty-
second time frame. In contrast, the pink and purple
clusters exhibited a distinct pattern where the speed
initially increased from a low point, peaked, and then
decreased again, forming a trajectory similar to a half-
circle as described in cf. Figure 7. The grey clus-
ter was characterized by generally lower speed values
and exhibited little variation. In the final green cluster,
a consistently high speed was maintained throughout
the observed period.
In the acceleration map analysis, distinct patterns
emerged across the clusters (cf. Figure 8). The
orange, blue, and green clusters predominantly dis-
played a decreasing trend in acceleration values, re-
maining largely within a lower range. A notable ex-
ception was identified within the blue cluster, where
a peak in acceleration was observed in approximately
five hexagons. In stark contrast, the pink and pur-
ple clusters exhibited a pronounced sudden peak in
acceleration, which later subsided. This pattern sug-
gests a more dynamic and variable acceleration be-
Influential Factors on Drivetrain Consumption in Electric City Buses and Assessing the Optimization Potentials
335
havior in these clusters. The grey cluster, however,
presented a more nuanced pattern of acceleration, os-
cillating from low to high and then reverting to low,
yet these fluctuations were confined to a lower range
and did not exhibit the high peaks seen in the pink and
purple clusters.
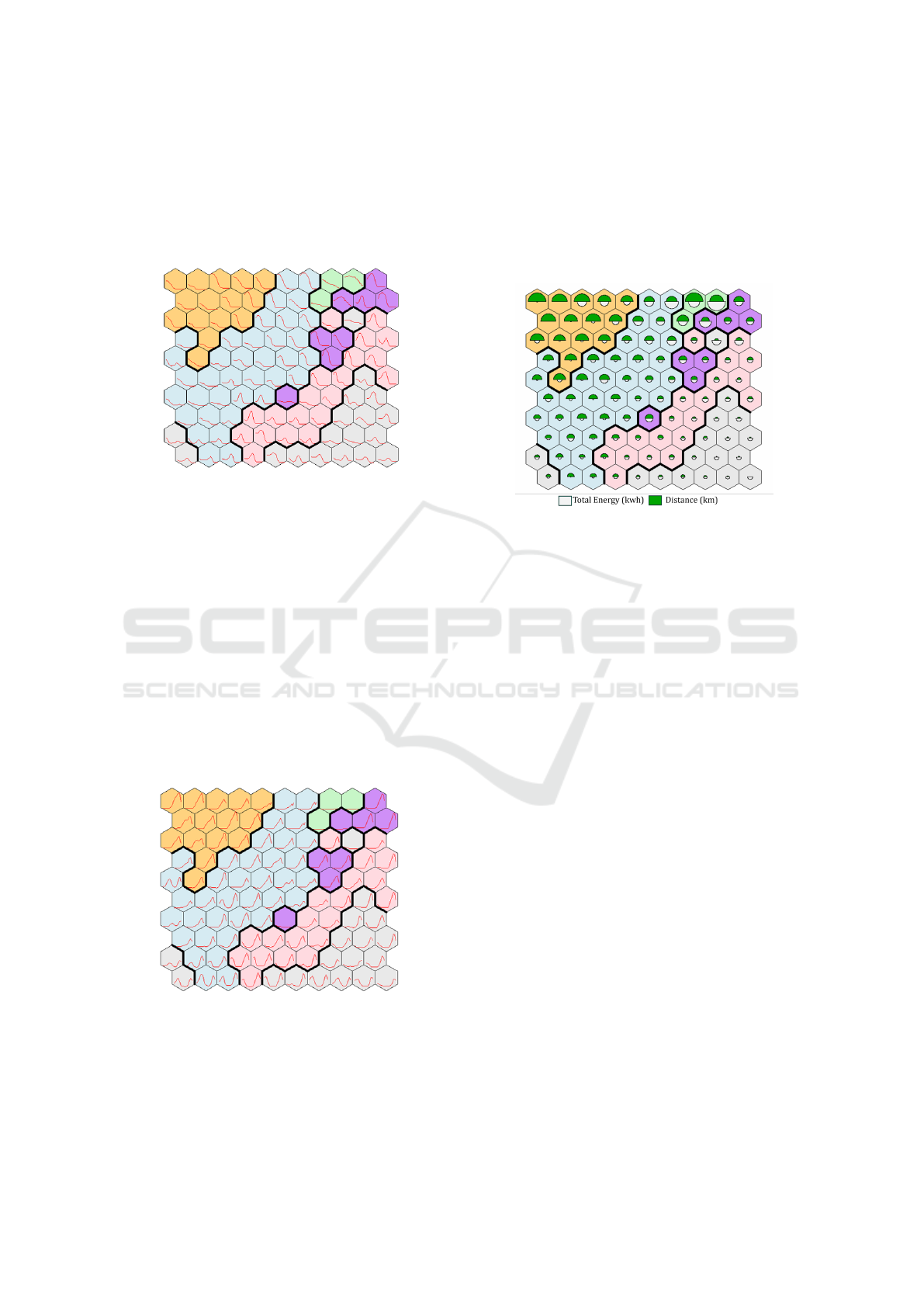
Figure 8: Code map for the vector layer Acceleration (%).
In the orange and blue clusters of the brake pedal
code map (cf. Figure 9), braking was applied con-
sistently in the last twenty seconds before a bus stop,
with brake values decreasing over about twelve sec-
onds. In contrast, the pink and purple clusters showed
predominant braking in the last five seconds, effective
due to generally lower speeds. The grey cluster exhib-
ited a more irregular braking pattern; in eight specific
hexagons, two distinct peaks in brake value were ob-
served, indicating variable braking behavior. Mean-
while, the green cluster showed a consistent brake
value of zero, suggesting no change or application of
the brakes in this cluster. These patterns highlight di-
verse braking strategies influenced by speed and ap-
proach to bus stops.
Figure 9: Code map for the vector layer Brake pedal (%).
Analyzing the scalar component code map in cf.
Figure 10, which details distance and energy use
over twenty seconds, clear energy efficiency pat-
terns emerged. The orange and blue clusters demon-
strated greater efficiency, consuming 0.697 and 0.606
kWh/km less than the highest consumption cluster, re-
spectively, achieving more distance (≈ 270 m) with
less energy. In contrast, the purple, pink, gray, and
green clusters consumed more energy (0.528, 0.426,
0.457, and 0.697 kWh/km higher, respectively) for
shorter distances (≈ 120 m), indicating lower energy
efficiency.
Figure 10: Code map for the scalar layer, depicting the dis-
tance traveled and energy consumed.
A count plot analysis (cf. Figure 11) of these
clusters indicated a higher frequency of instances in
hexagons that were less energy efficient, suggesting
that certain driving styles lead to increased energy
consumption during bus stop approaches. Alterna-
tively, this pattern may also reflect a lack of aware-
ness or concern among drivers regarding more effi-
cient driving methods. The orange and blue clusters
are characterized by a negative average energy value
which is negative, indicative of effective energy recu-
peration as the bus approaches the stop. Within the
dataset, 20,875 instances, constituting 45.86% of the
total observed bus stop entries, fall into the energy-
efficient clusters. Meanwhile, the clusters identified
as less energy efficient comprise 24,642 instances,
which equate to 54.14% of the entire set of data
points.
6 CONCLUSION
In summary, this research utilizes SHAP values to
comprehensively analyze drivetrain energy consump-
tion. Two distinct scenario groups were identified:
one focuses on acceleration and starting, while the
other focuses on various driving conditions. Ac-
celeration is primarily influenced by the accelerator
pedal and vehicle speed, with higher speeds demand-
ing more energy. In driving scenarios, factors such as
accelerator and brake pedal positions, vehicle speed,
and retarder level play crucial roles.
DATA 2024 - 13th International Conference on Data Science, Technology and Applications
336

Figure 11: Number of driving instances entering the bus
stop mapped into different nodes.
The DAC analysis disclosed that the cluster with
elevated drivetrain energy consumption exhibited in-
creased acceleration upon approaching bus stops, a
trend which is also prevalent during early morning
and nighttime periods. Likewise, the SOM analysis
determined that more than half of the instances in the
dataset fell into clusters characterized by energy in-
efficiency, thereby contributing to sub-optimal energy
consumption.
By adjusting driving behaviors and reducing in-
efficient practices, the operational efficiency of city
buses can be significantly improved. Future research
could explore the nuances of energy consumption as
electric city buses transition from idling to motion,
particularly when departing from bus stops. This
analysis would complement current findings and pave
the way for the development of data-driven systems
to help drivers optimize energy use during operations.
REFERENCES
Beckers, C. J., Paroha, M., Besselink, I. J., and Nijmeijer,
H. (2020). A microscopic energy consumption pre-
diction tool for fully electric delivery vans. (5).
Chen, Y., Wu, G., Sun, R., Dubey, A., Laszka, A., and
Pugliese, P. (2021). A review and outlook of energy
consumption estimation models for electric vehicles.
De Cauwer, C., Verbeke, W., Coosemans, T., Faid, S., and
Van Mierlo, J. (2017). A data-driven method for
energy consumption prediction and energy-efficient
routing of electric vehicles in real-world conditions.
Energies, 10(5).
He, Y., Li, J., Chen, Z., Wu, C., Ba, J., and Li, Z. (2021).
Research on identification approach of risky driving
behaviors for new energy vehicles based on internet
of vehicles data. In 2021 6th International Confer-
ence on Transportation Information and Safety (IC-
TIS), pages 1320–1326.
IEA (2021). Global ev outlook 2021: Scaling up the transi-
tion to electric mobility.
IEA (2023). Trucks and buses - international energy agency.
Accessed on 2023.12.08.
Kiranyaz, S., Avci, O., Abdeljaber, O., Ince, T., Gabbouj,
M., and Inman, D. J. (2021). 1d convolutional neu-
ral networks and applications: A survey. Mechanical
Systems and Signal Processing, 151:107398.
Kivek
¨
as, K., Lajunen, A., Baldi, F., Veps
¨
al
¨
ainen, J., and
Tammi, K. (2019). Reducing the energy consumption
of electric buses with design choices and predictive
driving. IEEE Transactions on Vehicular Technology,
68(12):11409–11419.
Kohonen, T. (1990). The self-organizing map. Proceedings
of the IEEE, 78(9):1464–1480.
Lu, S. and Li, R. (2021). Dac: Deep autoencoder-based
clustering, a general deep learning framework of rep-
resentation learning.
Lundberg, S. and Lee, S.-I. (2017). A unified approach to
interpreting model predictions.
Mahmoud, M., Garnett, R., Ferguson, M., and Kanaroglou,
P. (2016). Electric buses: A review of alternative pow-
ertrains. Renewable and Sustainable Energy Reviews,
62(C):673–684.
R
¨
osch, T., Raghuraman, S., Sommer, M., Junk, C., Bau-
mann, D., and Sax, E. (2023). Multi-layer approach
for energy consumption optimization in electric buses.
In 2023 IEEE 97th Vehicular Technology Conference
(VTC2023-Spring), pages 1–6.
Sommer, M., R
¨
osch, T., and Sax, E. (2023). Fleet data
used for self-learning functions in commercial vehi-
cles. In 17th International Conference Commercial
Vehicles 2023, page 81.
SustainableBus (2023). Electric bus public transport: Main
fleets and projects around the world. Accessed on
2023-12-08.
Thorgeirsson, A. T., Scheubner, S., F
¨
unfgeld, S., and Gau-
terin, F. (2021). Probabilistic prediction of energy
demand and driving range for electric vehicles with
federated learning. IEEE Open Journal of Vehicular
Technology, 2:151–161.
Varga, B. O., Sagoian, A., and Mariasiu, F. (2019). Pre-
diction of electric vehicle range: A comprehensive re-
view of current issues and challenges. Energies, 12(5).
Wirth, R. and Hipp, J. (2000). Crisp-dm: Towards a stan-
dard process model for data mining. In Proceedings of
the 4th international conference on the practical ap-
plications of knowledge discovery and data mining,
volume 1, pages 29–39. Manchester.
Zhang, J., Wang, Z., Liu, P., and Zhang, Z. (2020). Energy
consumption analysis and prediction of electric vehi-
cles based on real-world driving data. Applied Energy,
275:115408.
Zhang, R. and Yao, E. (2015). Electric vehicles’ energy
consumption estimation with real driving condition
data. Transportation Research Part D: Transport and
Environment, 41:177–187.
Zhang, Y., Yuan, W., Fu, R., and Wang, C. (2019). Design
of an energy-saving driving strategy for electric buses.
IEEE Access, 7:157693–157706.
Influential Factors on Drivetrain Consumption in Electric City Buses and Assessing the Optimization Potentials
337
