
Methodological Approach to Model and Validate CPS
Perla Tannoury and Ahmed Hammad
FEMTO-ST Institute, CNRS, University of Bourgogne Franche-Comt
´
e Besanc¸on, France
Keywords:
CPS, Specifications, Validation Techniques, System Engineering, Semi-Formal Modeling, Verification.
Abstract:
As Cyber-Physical Systems (CPS) become increasingly complex and critical, ensuring high-quality specifica-
tions is crucial. However, the process is often challenging due to the need for expertise and lack of guidance.
To address this, we propose a methodological framework and tools for CPS specification and validation. Our
approach utilizes semi-formal modeling and incorporates SysML and AcTRL technologies. By applying val-
idation strategies early in the development process, we aim to reduce the costs of correcting errors. This
comprehensive approach offers vital support to designers navigating CPS complexities.
1 INTRODUCTION
In recent years, Cyber-Physical Systems (CPS) have
become increasingly complex, integrating diverse
components and technologies (Walia et al., 2024; Yu
et al., 2023). These systems exhibit intricate behav-
iors, challenging conventional analysis and predic-
tion methods. Their complexity stems from the dy-
namic interplay among components, enabling real-
time sensing, processing, and actuation, often result-
ing in unpredictable behaviors.
Moreover, the criticality of CPS, particularly those
involving human safety or significant financial risks
(Hossain et al., 2024; Barroso et al., 2023; Tri-
pathi et al., 2021), underscores the necessity for
stringent quality standards. To exacerbate the chal-
lenge, the competitive global market demands cost-
effectiveness and time efficiency from CPS develop-
ers.
Addressing the intricacies of CPS development re-
quires a systematic approach to meet diverse require-
ments and constraints such as cost, time, quality, and
operation. System Engineering (SE) has emerged as
a framework to formalize and manage the design of
complex CPS and products (Wade et al., 2015).
Advocating for a Model-Based Systems Engineer-
ing (MBSE) paradigm, INCOSE (Friedenthal et al.,
2007) suggests employing semi-formal graphical lan-
guages, like a UML profile, to model CPS soft-
ware and hardware components (Ordinez et al., 2020;
Chatterjee and Reza, 2020).
Model-Driven Engineering (MDE) has signifi-
cantly advanced CPS development by focusing on ab-
stract concerns rather than immediate practical imple-
mentation (Mohamed et al., 2021a; Mohamed et al.,
2021b). Specifying a CPS involves defining its re-
quirements, structures, and behaviors, categorized
into functional and non-functional aspects. Func-
tional requirements specify the system’s functions,
while non-functional requirements encompass perfor-
mance, reliability, and security considerations.
Various methodologies, such as SysReo (Tan-
noury et al., 2022; Tannoury, 2022; Tannoury et al.,
2023), ModelPlex (Mitsch and Platzer, 2016), and
INTO-CPS (Thule et al., 2019) have been proposed to
validate complex system designs. However, validat-
ing heterogeneous complex CPS requires a compre-
hensive approach that addresses both functional and
non-functional requirements. This approach should
facilitate automated validation through formal ver-
ification and simulation, grounded in requirements
modeling and ensuring traceability of the system’s
structure and behavior.
In this paper, we propose a comprehensive ap-
proach to facilitate CPS design, incorporating tools
for specifying and validating these systems. Our
method emphasizes semi-formal modeling of system
requirements and integrates environments tailored for
verification and simulation. By applying validation
approaches early in the system development process,
we aim to mitigate the costs associated with correct-
ing specification and design errors. This integrated
approach not only streamlines the design process but
also enhances the overall robustness of CPS by identi-
fying and addressing potential issues at an early stage.
Additionally, our methodology seeks to foster collab-
Tannoury, P. and Hammad, A.
Methodological Approach to Model and Validate CPS.
DOI: 10.5220/0012758800003758
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2024), pages 281-288
ISBN: 978-989-758-708-5; ISSN: 2184-2841
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
281

oration and knowledge sharing among diverse stake-
holders involved in the CPS design process, promot-
ing a more holistic and efficient development life-
cycle.
The paper is structured as follows. Section 2 out-
lines the validation approach, while Section 3 elab-
orates on validation through simulation. Section 4
delves into the validation method via formal verifi-
cation. Finally, Section 5 concludes the paper.
2 VALIDATION APPROACH
2.1 Introduction
Ensuring early validation of complex CPS requires
a tailored approach, integrating simulation for non-
functional and verification for functional require-
ments. Our methodology initiates validation from
project outset, merging audit and simulation into
specification. We endorse SysML for specification,
employing system engineering techniques to trans-
form SysML into simulation and/or verification en-
vironments. This paper motivates language selection
before detailing our approach.
2.2 Presentation of the Approach
Our validation approach begins with meticulous mod-
eling of Cyber-Physical Systems (CPS). We start by
identifying and classifying requirements into func-
tional and non-functional categories using SysML.
This phase establishes clear relationships among re-
quirements, forming a solid foundation.
Moving to the next phase, we model the CPS’s
structure and behavior using SysML diagrams such
as blocks, internal blocks, parametric structures, se-
quence, and activity diagrams. Critical traceability
links and verification connections between require-
ments and model elements are established, ensuring
a comprehensive representation.
These initial phases constitute the modeling stage,
focusing on creating accurate representations. We
then use model-driven engineering techniques to
transform SysML diagrams into simulation or veri-
fication environments tailored to functional and non-
functional requirements.
Finally, we employ simulation environments like
VHDL-AMS (Haase et al., 2003) and Modelica (Ot-
ter and Elmqvist, 2001)), alongside verification tools
like Model-checker CPN-Tools (Jensen et al., 2007)
and SPIN (Holzmann, 1997), to compare design mod-
els with requirement models. This ensures alignment,
enhancing the overall robustness and reliability of the
CPS. Figure 1 outlines the sequential steps of our ap-
proach, from requirement identification to simulation
and verification.
Figure 1: Specification and validation methodology.
3 VALIDATION APPROACH BY
SIMULATION
3.1 Context and Motivations
In this section, we explore the integration of SysML
with VHDL-AMS and Modelica, as illustrated in Fig-
ure 1. Emphasizing simulation’s role, we use it to vi-
sualize system designs comprehensively and preempt
integration challenges. By testing virtual prototypes,
developers can validate requirements and identify po-
tential issues, enhancing the validation process’s effi-
cacy.
The design and validation of complex CPS pose
scientific and industrial challenges due to the integra-
tion of heterogeneous components from various do-
mains. Non-functional requirements, such as safety
and reliability, are formalized using temporal logic
languages, while quantitative constraints, like energy
consumption and performance, are expressed through
mathematical equations (Wang et al., 2012).
Validating non-functional requirements, espe-
cially those expressed by partial differential equa-
tions, presents challenges in formal verification.
Computer simulation offers a pragmatic alterna-
tive, effectively modeling physical constraints and
complex phenomena within computer-based environ-
ments.
By providing insights into complex physical pro-
cesses, simulation serves as a cost-effective means
to explore CPS development intricacies and under-
stand system behavior in controlled virtual settings.
SysML, with its parametric diagram feature, facil-
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
282
itates seamless integration with simulation environ-
ments (Gauthier, 2013).
Our approach leverages SysML for CPS specifica-
tion, transforming models into simulation languages.
Continuously refining this integration, we explore the
potential synergy of SysML with SystemC (Gauthier,
2013), positioning our approach as a robust frame-
work for modeling, analysis, and simulation in CPS
development.
3.2 Joint Use of SysML and
VHDL-AMS
3.2.1 Introduction
Modeling is crucial for managing complexity and en-
suring system security and compliance with defined
requirements. This challenge is particularly evident
in Systems on Chip (SoCs) and embedded systems,
where the gap between software and hardware is nar-
rowing (Prevostini and Zamsa, 2007). Collaboration
among development teams and clients is essential to
define needs, clarify requirements, and ensure speci-
fications meet expectations.
System engineering methods rely on modeling,
verification, and simulation to validate requirements
and enhance the quality and reliability of critical sys-
tems. Graphical modeling languages, such as SysML,
serve as powerful tools for modeling complex Cyber-
Physical Systems (CPS) (Holt and Perry, 2008). Our
proposed methodology, illustrated in Figure 2, com-
bines SysML with VHDL-AMS and PSL (P
ˆ
echeux
et al., 2005).
SysML, an extension of UML2, offers a simple
and effective vocabulary for system engineering (Holt
and Perry, 2008). It allows for concrete system rep-
resentations and specification implementation in var-
ious development environments, ensuring coherence
between modeling and implementation.
For software, commonly used languages include
Java or C++, while Hardware Description Languages
(HDLs) are used for material description (Arnold
et al., 2005; Harris and Harris, 2022). VHDL, Sys-
temC, and Verilog are among the most commonly
used HDLs (Christen and Bakalar, 1999; Palnitkar,
2003).
Simulation is crucial for systems integrating ana-
log and digital technology. VHDL-AMS addresses
this by allowing modeling of abstracted objects and
treatment of values in continuous time (Christen and
Bakalar, 1999).
The Property Specification Language (PSL) en-
ables writing complex temporal logic properties for
circuit verification, including structured language
with formally defined semantics, model-checking,
and parallel analysis of HDL functional simulation
properties.
SYSML
Requirements
non-functional functional
Strucutral models (BDD, parametric,...)
Behavioral (State machine, activity,...)
VHDL-AMS Model
Model transformation
Test
Test generation
Simulation
PSL
Verification
Simulation
formalization of requirements
Figure 2: SysML, VHDL-AMS and PSL.
3.2.2 Case Studies
In the ANR Smart Surface project, dedicated to de-
veloping a Smart Surface based on autonomous dis-
tributed micro-robotic systems for robust and adap-
tive micromanipulation, an effective synergy between
SysML and VHDL-AMS was discovered. This was
evident in the study conducted by Giorgetti, showcas-
ing a convergence of concepts between SysML and
VHDL-AMS (Giorgetti et al., 2010).
In another context, within the SyVAD project sit-
uated in the Franche-Comt
´
e region in France, the pri-
mary objective is to control the boundary layer using
distributed generators of inclined jets for a variable-
speed automobile under normal conditions. The re-
search focused on analyzing the airflow around the
Ahmed body, a simplified yet extensively studied car
geometry (Ahmed et al., 1984). This body serves as
a fundamental model for comprehending fluid flow
around cars, and it has been widely utilized in nu-
merical simulations aimed at minimizing drag (Bou-
quet et al., 2012). These projects exemplify the versa-
tile application of SysML in conjunction with VHDL-
AMS and the significance of their integration in di-
verse research initiatives, illustrating their adaptabil-
ity across different domains within the field of Cyber-
Physical Systems.
Methodological Approach to Model and Validate CPS
283
4 VALIDATION METHOD BY
FORMAL VERIFICATION
4.1 Introduction
This section focuses on formally verifying complex
Cyber-Physical Systems (CPS) through the combined
use of SysML and Hierarchical Colored Petri Net
models (HCPN) (Huber et al., 1991).
In the development cycle of complex CPS, ver-
ification is crucial for ensuring adherence to speci-
fied requirements. While SysML is effective for de-
scribing complex systems, it lacks built-in verifica-
tion mechanisms. To address this, integrating SysML
with formal languages enhances the verification pro-
cess, leveraging SysML’s robust specification capabil-
ities while ensuring alignment with essential require-
ments. This integrated approach enables a compre-
hensive assessment of complex CPS, upholding the
highest standards of compliance and reliability.
4.2 Verification Process
We present our proposed approach to specify and ver-
ify complex systems. The initial step involves spec-
ifying the system and its requirements. This phase
encompasses describing the requirements, structure,
and behavior of the system while accounting for the
verification process. Requirements specification re-
lies on the SysML requirements diagram. Functional
requirements, particularly those intended for verifica-
tion on activity diagrams, need to be formalized using
AcTRL (Activity Temporal Requirement Language)
(Rahim et al., 2014). The formalization of require-
ments aims to eliminate any ambiguity regarding their
semantics to enable formal verification. Additionally,
the specification of system behavior and structure is
SysML-based. Specifically, the block definition dia-
gram is used to depict the system’s structure, while
the activity diagram is employed to delineate its be-
haviors.
The second step in the approach involves con-
sidering the relationships between requirements and
model elements to identify the diagrams relevant for
the verification phase. This traceability serves as a
guide for the verification of requirements on the de-
sign templates. Subsequently, the SysML diagrams
under consideration are transformed into formal spec-
ifications to articulate their execution semantics and
facilitate the use of formal verification tools. How-
ever, formulating such a transformation is challenging
and necessitates a comprehensive understanding of
both the source and target domains to identify struc-
tural and semantic equivalences between the elements
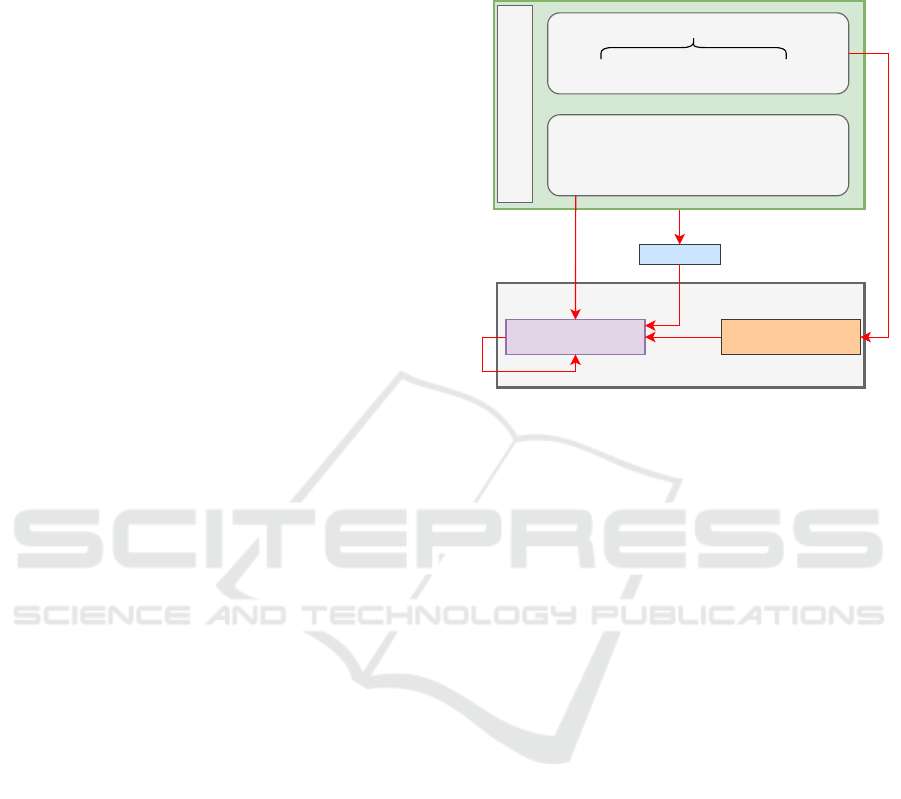
Figure 3: Specification and verification approach.
in each domain.
Given their resemblance to activity diagrams, Hi-
erarchical Colored Petri Nets (HCPN) were chosen.
Temporal logic languages were used to articulate the
requirements.
Once the translation into formal specifications is
done, the SysML requirements verification is started
based on the Model-Checking technique. The veri-
fication based on the Model-Checking is completely
automatic and allows to check the satisfaction of the
properties written in temporal logic. It also provides
counterexamples when the formula tested is not sat-
isfied. This is the scenario (execution trace) that led
to the error. These counter-examples are very useful
because they provide important indications for model
correction under verification.
The interpretation of the results of the verification
on the high level specification (SysML specification)
is the last step in this specification and verification
process. This step of interpreting audit results relies
on human expertise. It must be able to detect the ori-
gin of the error in the SysML specification (error in
the model requirements or in the design models). This
approach is described in Figure 3.
4.3 Formalization of the Requirements
Our proposal for the formalization of the require-
ments concerning behaviors modeled by activity dia-
grams consists in the definition of the language Ac-
TRL (Rahim et al., 2014). This language was de-
signed for use by SysML practitioners. It allows to
formalize, while remaining at a level of abstraction
close to SysML, the requirements described by nat-
ural texts, in expressing them as temporal properties
concerning the elements of the activity diagrams. In
the SysML requirements diagram, the designer can
bind a requirement R to the activity A, by a ”Verify”
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
284

Figure 4: Representation of the requirements expressed in
AcTRL.
relationship to express that the activity A satisfy the
requirement R. If this requirement is functional and
concerns a behavior of the system modeled by an ac-
tivity diagram, it can surely be expressed according
to the states of the elements of SysML activities. So,
a possible formalization (at the SysML level) of the
requirements related to the activities consists in ex-
pressing them according to the states of the elements
of the activity diagram. It’s starting from this idea, the
proposed AcTRL language. This language is there-
fore intended for SysML designers to describe the re-
quirements written in natural language in a language
more formal but close to SysML. It only concerns the
requirements related to SysML activities. It makes it
possible to express a requirement as a property con-
cerning the elements of the activity on which this re-
quirement will be verified. To define this language,
the approach is rooted in establishing a high-level rep-
resentation of the operational semantics of a SysML
activity. This representation conceptualizes all poten-
tial states resulting from the execution of the activity,
resembling a system of states/transitions. Following
this definition, predicates are established to character-
ize the states of elements within the activity diagram
and articulate their properties. OCL (Object Con-
straint Language) (OMG, 2012) is used to express ob-
ject and object node properties within this framework.
Subsequently, the language is enriched with time op-
erators leveraging the system of specification patterns
outlined in prior literature (Dwyer et al., 1999).
For traceability reasons, the requirements ex-
pressed in AcTRL language are represented in the
SysML requirements diagram and linked to the re-
quirements expressed in natural language. This is
illustrated in Figure 4. It is observed that follow-
ing the formalization of the Req1 requirement, which
is linked by a ”Verify” relation to a SysML element
stereotyped as ”test case” representing a SysML ac-
tivity, another requirement DReq1 expressed in Ac-
TRL is generated. The latter is linked to the require-
ment Req1 by the ”DeriveReq” relation, while the
”Verify” relation is established between the require-
ment DReq1 expressed in AcTRL and the element
”Test Case”.
4.4 Transformation in Formal
Specifications
Our approach is based on translating the activity di-
agrams into Hierarchical Colored Petri Nets (HCPN)
(An et al., 2018). Before detailing this transformation,
we present the HCPN.
4.4.1 Hierarchical Colored Petri Nets
The HCPN are a class of high-level Petri nets pro-
posed for compositional modeling of systems. An
HCPN model is constructed from several colored
Petri nets connected to each other. In HCPNs, the
substitution transition concept makes reference to a
colored Petri net called subnet. The latter is described
in a separate page and gives a more detailed descrip-
tion of the part of the system modeled by the substi-
tution transition. The notion of substitution transition
is used to structure the HCPN in several pages (sev-
eral subnets). A substitution transition has places at
the entrance and places at the exit called places sock-
ets. The relationship between a substitution transition
and its subnet is given by the specification that links
the subnetwork places with the sockets of the substi-
tution transition.
4.4.2 PNML (Petri Net Markup Language)
PNML (Petri Net Markup Language) is a standard-
ized format for Petri nets, specified in ISO/IEC 15909
(Billington et al., 2003). It aims to enable interoper-
ability among Petri net-based tools. In our approach,
we propose using PNML as an intermediate format
for translating activity diagrams into Petri nets. This
choice leverages PNML’s tool-independence and the
availability of meta-models within the PNML frame-
work (Hillah et al., 2010).
4.4.3 CPN and Tools
The CPN tool, developed by the CPN Group at the
University of Aarhus, is widely used for analyzing
and verifying Petri nets (Jensen et al., 2007). It sup-
ports editing, simulation, and verification of ordinary
and colored Petri nets, as well as HCPN. CPN Tools
includes a simulator, state space analysis, and in-
tegrates a model-checker for ASK-CTL (Billington
et al., 2003).
4.4.4 Transformation of Activity Diagrams in
HCPN
Various translations of activity diagrams to Petri nets
have been proposed (Foures et al., 2011; Vladimiri-
ovich et al., 2015), each with specific goals. In this
Methodological Approach to Model and Validate CPS
285
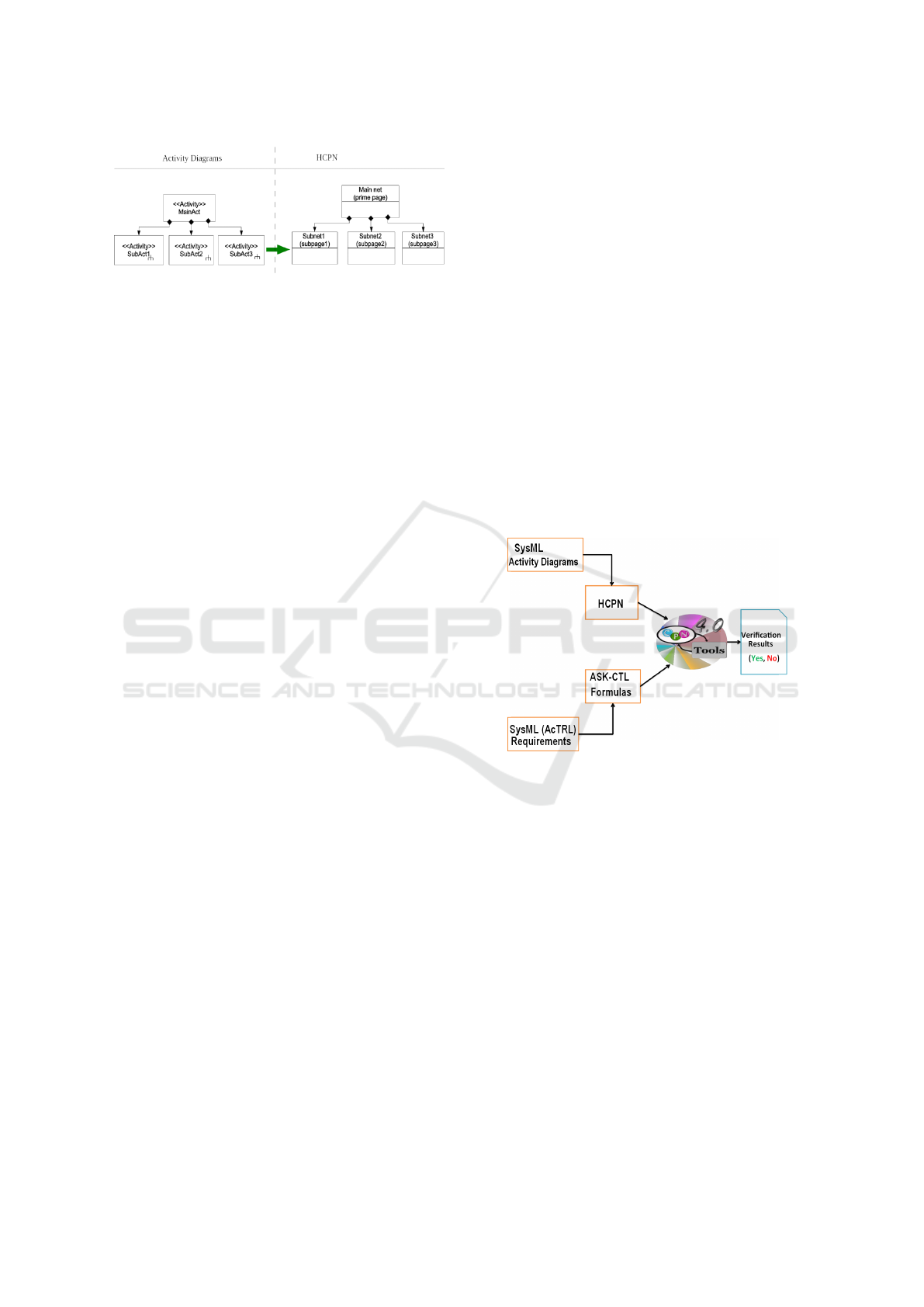
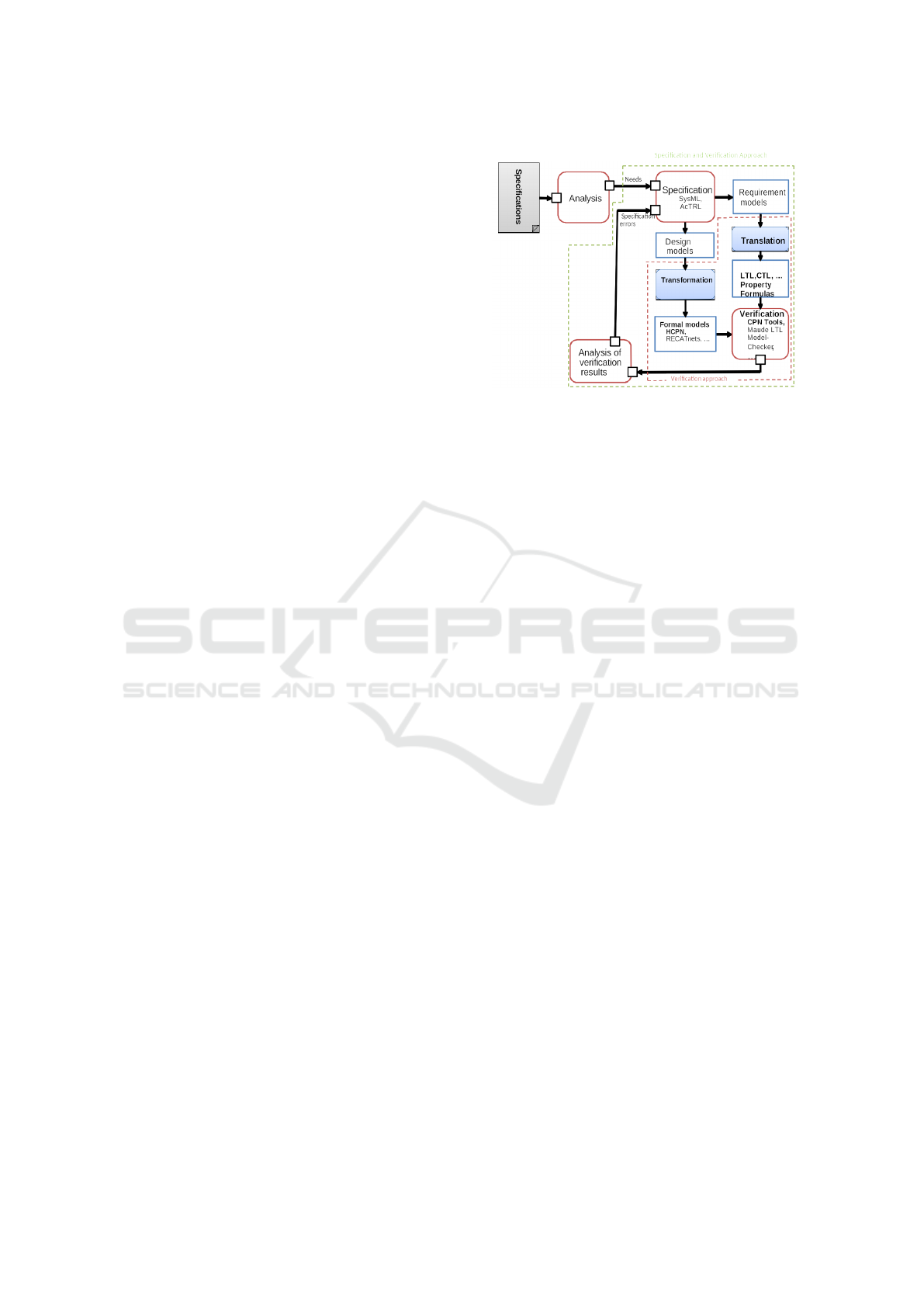
Figure 5: Translation of the structure.
work, we aim to check requirements on activity dia-
grams by automatically translating them into a formal
specification based on HCPNs.
Our approach considers the composition of activ-
ities, including activity call actions, to preserve the
structure and semantics of the activity diagrams in the
resulting HCPN models. The translation involves two
steps: an M2M transformation using ATL to convert
the activity diagram into a PNML Petri net, followed
by an M2T transformation generating an HCPN in
CPN Tools format from the PNML representation.
To maintain the composite structure of activity
diagrams, each sub-activity is translated into a sub-
network of the HCPN, represented on separate pages.
The main activity of the diagram corresponds to the
primary page of the HCPN, as illustrated in Figure 5.
4.4.5 Translation of Requirements into
Temporal Logic Formulas
The AcTRL language enables high-level specifica-
tion of requirements for verification by different ap-
proaches, depending on the verification tools used.
To verify SysML requirements expressed in AcTRL
on the HCPN translated from an activity diagram, the
requirements are translated into temporal logic lan-
guage. As the CPN Tools tool is chosen for verifi-
cation, the requirements expressed in AcTRL must
be translated into the ASK-CTL temporal logic. The
ASK-CTL logic is a variant of the CTL logic, sup-
ported by the CPN Tools tool.
The passage from AcTRL to ASK-CTL is carried
out in two stages. The first step is based on the library
proposed in (Dwyer et al., 1999) to switch from Ac-
TRL to CTL. The second step is based on the equiv-
alences between CTL and ASK-CTL to switch from
CTL to ASK-CTL. The interpretation of the AcTRL
predicate expressions on the RdPHC is defined ac-
cording to the translation of the HCPN activity dia-
grams.
4.5 Verification of the SysML
Requirements
Once the SysML specifications (SysML activity di-
agram and requirements) are translated into formal
specifications (CPN Tools CPN and ASK-CTL For-
mulas), the verification step can be initiated using the
tool CPN Tools. As part of our approach, Figure 6
illustrates the verification of SysML requirements on
activity diagrams using the CPN Tools tool. The veri-
fication process for ASK-CTL formulas with the CPN
Tools tool involves the following steps:
• Generation of the state space,
• Invoking the ASK-CTL library with the following
command: use (ogpathˆ ”ASKCTL / ASKCTL-
loader.sml”)
• Opening the file containing the ASK-CTL formu-
las,
• Evaluation of ASK-CTL formulas.
Figure 6: Verification of the SysML requirements via CPN
Tools.
5 CONCLUSION
In this paper, we introduce a methodology to spec-
ify and validate complex CPS, leveraging SysML and
emphasizing precise requirement descriptions and the
utilization of relationships between SysML model el-
ements. SysML, well-suited for heterogeneous com-
plex CPS, facilitates hierarchical block modeling of
hardware and software, and enables graphical repre-
sentation of mathematical equations defining physical
behaviors.
However, despite the various advantages of
SysML, it remains a semi-formal language lacking di-
rect execution or simulation capabilities, making val-
idation challenging. This approach aims to integrate
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
286

requirement traceability and Model Driven Engineer-
ing (MDE) techniques to transform SysML models
into simulation (e.g., Modelica, VHDL-AMS, Sys-
temC) and verification (e.g., SPIN (Holzmann, 1997))
formats.
Functional and non-functional requirements in
complex CPS systems vary in nature. Non-functional
requirements are often validated through simula-
tion, achieved by converting SysML diagrams, such
as the parametric diagram, into simulation environ-
ments. On the other hand, functional requirements
undergo validation through formal verification. We
propose a temporal language, closely aligned with
the SysML environment to specify functional require-
ments, which can be expressed on SysML diagrams
and subsequently transformed along with SysML
models into verification environments.
When developing a new methodological ap-
proach, the construction of software tools to support
it is crucial. The aim is to provide researchers with
a methodological guide for the specification, design,
and development of their systems.
The first step in our methodology is the require-
ment specification step. The role of this step is to de-
fine and model the requirements after the needs anal-
ysis described in the loads. In engineering, the val-
idation of the requirements and their evolution over
the whole life cycle of a hardware project, software,
or mixed software allows the development of a com-
mon understanding of all stakeholders of the system
to develop. Requirements accurately measure system
or software compliance in relation to needs or con-
straints. To enrich our approach, SysML requirements
will be briefly analyzed. The first step involves for-
malizing them to express them precisely and remove
any ambiguity. Formalizing requirements is essential
for verification. The formal language AcTRL is pro-
posed to formalize requirements related by the “Ver-
ify” relationship with activity diagrams. Extending
this language to incorporate other categories of re-
quirements would be beneficial. This step can also be
used to validate and/or formally verify operations on
requirements, including refinement. The SysML ”Re-
fine” relationship details a requirement by another
or by a modeling element, enabling traceability be-
tween requirements and model elements. The formal
verification of refinement of SysML requirements is
not addressed in the literature. Investing in this area
will propose a process to verify the correctness of the
“Refine” relationship. Generalizing this approach to
other relationships like Derive, Contains, Satisfy is
necessary.
REFERENCES
Ahmed, S. R., Ramm, G., and Faltin, G. (1984). Some
salient features of the time-averaged ground vehicle
wake. SAE transactions, pages 473–503.
An, Y., Wu, N., Zhao, X., Li, X., and Chen, P. (2018). Hier-
archical colored petri nets for modeling and analysis
of transit signal priority control systems. Applied Sci-
ences, 8(1):141.
Arnold, K., Gosling, J., and Holmes, D. (2005). The
Java programming language. Addison Wesley Pro-
fessional.
Barroso, S., Bustos, P., and Nunez, P. (2023). Towards a
cyber-physical system for sustainable and smart build-
ing: a use case for optimising water consumption on
a smartcampus. Journal of Ambient Intelligence and
Humanized Computing, 14(5):6379–6399.
Billington, J., Christensen, S., Van Hee, K., Kindler, E.,
Kummer, O., Petrucci, L., Post, R., Stehno, C., and
Weber, M. (2003). The petri net markup language:
Concepts, technology, and tools. In Applications and
Theory of Petri Nets 2003: 24th International Con-
ference, ICATPN 2003 Eindhoven, The Netherlands,
June 23–27, 2003 Proceedings 24, pages 483–505.
Springer.
Bouquet, F., Gauthier, J.-M., Hammad, A., and Peureux, F.
(2012). Transformation of sysml structure diagrams
to vhdl-ams. In 2012 Second Workshop on Design,
Control and Software Implementation for Distributed
MEMS, pages 74–81. IEEE.
Chatterjee, A. and Reza, H. (2020). Toward modeling and
verification of uncertainty in cyber-physical systems.
In 2020 IEEE International Conference on Electro In-
formation Technology (EIT), pages 568–576. IEEE.
Christen, E. and Bakalar, K. (1999). Vhdl-ams: a hardware
description language for analog processing. IEEE
Transactions on Circuits and Systems II: Analog and
Digital Signal Processing, 46(10):67.
Dwyer, M. B., Avrunin, G. S., and Corbett, J. C. (1999).
Patterns in property specifications for finite-state veri-
fication. In Proceedings of the 21st international con-
ference on Software engineering, pages 411–420.
Foures, D., Albert, V., and Pascal, J.-C. (2011). Activitydia-
gram2petrinet: transformation-based model in accor-
dance with the omg sysml specifications. In Eurosis,
The 2011 European Simulation and Modelling Con-
ference, pages p429–p433.
Friedenthal, S., Griego, R., and Sampson, M. (2007). Incose
model based systems engineering (mbse) initiative. In
INCOSE 2007 symposium, volume 11. sn.
Gauthier, J.-M. (2013). Test generation for rtes from sysml
models: Context, motivations and research proposal.
In 2013 IEEE Sixth International Conference on Soft-
ware Testing, Verification and Validation, pages 503–
504. IEEE.
Giorgetti, A., Hammad, A., and Tatibou
¨
et, B. (2010). Using
sysml for smart surface modeling. In 2010 First Work-
shop on Hardware and Software Implementation and
Control of Distributed MEMS, pages 100–107. IEEE.
Methodological Approach to Model and Validate CPS
287

Haase, J., Bastian, J., and Reitz, S. (2003). Vhdl-ams in
mems design flow. System Specification & Design
Languages: Best of FDL’02, pages 51–60.
Harris, D. M. and Harris, S. L. (2022). Hardware descrip-
tion languages. Digital Design and Computer Archi-
tecture, pages 170–235.
Hillah, L.-M., Kordon, F., Petrucci, L., and Treves, N.
(2010). Pnml framework: an extendable reference
implementation of the petri net markup language. In
Applications and Theory of Petri Nets: 31st Interna-
tional Conference, PETRI NETS 2010, Braga, Portu-
gal, June 21-25, 2010. Proceedings 31, pages 318–
327. Springer.
Holt, J. and Perry, S. (2008). SysML for systems engineer-
ing, volume 7. IET.
Holzmann, G. J. (1997). The model checker spin. IEEE
Transactions on software engineering, 23(5):279–
295.
Hossain, M. M., Kashem, M. A., Nayan, N. M., and
Chowdhury, M. A. (2024). A medical cyber-physical
system for predicting maternal health in developing
countries using machine learning. Healthcare Analyt-
ics, 5:100285.
Huber, P., Jensen, K., and Shapiro, R. M. (1991). Hierar-
chies in coloured petri nets. In Advances in Petri Nets
1990 10, pages 313–341. Springer.
Jensen, K., Kristensen, L. M., and Wells, L. (2007).
Coloured petri nets and cpn tools for modelling and
validation of concurrent systems. International Jour-
nal on Software Tools for Technology Transfer, 9:213–
254.
Mitsch, S. and Platzer, A. (2016). Modelplex: Verified
runtime validation of verified cyber-physical system
models. Formal Methods in System Design, 49:33–
74.
Mohamed, M., Kardas, G., and Challenger, M. (2021a).
Model-driven engineering tools and languages for
cyber-physical systems–a systematic literature review.
IEEE Access, pages 1–1.
Mohamed, M. A., Kardas, G., and Challenger, M. (2021b).
A systematic literature review on model-driven engi-
neering for cyber-physical systems. arXiv preprint
arXiv:2103.08644.
OMG, O. (2012). Object constraint language (ocl), version
2.3. 1.
Ordinez, L., Eggly, G., Micheletto, M., and Santos,
R. (2020). Using uml for learning how to de-
sign and model cyber-physical systems. IEEE Re-
vista Iberoamericana de Tecnologias del Aprendizaje,
15(1):50–60.
Otter, M. and Elmqvist, H. (2001). Model-
ica overview. URl: https://www. model-
ica. org/education/educationalmaterial/lecture-
material/english/ModelicaOverview. pdf.
Palnitkar, S. (2003). Verilog HDL: a guide to digital design
and synthesis, volume 1. Prentice Hall Professional.
P
ˆ
echeux, F., Lallement, C., and Vachoux, A. (2005). Vhdl-
ams and verilog-ams as alternative hardware descrip-
tion languages for efficient modeling of multidisci-
pline systems. IEEE transactions on Computer-Aided
design of integrated Circuits and Systems, 24(2):204–
225.
Prevostini, M. and Zamsa, E. (2007). Sysml profile for soc
design and systemc transformation. ALaRI, Faculty of
Informatics University of Lugano via G. Buffi, 13(5).
Rahim, M., Boukala-Ioualalen, M., and Hammad, A.
(2014). Petri nets based approach for modular veri-
fication of sysml requirements on activity diagrams.
In PNSE@ Petri Nets, pages 233–248.
Tannoury, P. (2022). An incremental model-based design
methodology to develop cps with sysml/ocl/reo. In
Journ
´
ees du GDR GPL.
Tannoury, P., Chouali, S., and Hammad, A. (2022). Model
driven approach to design an automotive cps with sys-
reo language. In Proceedings of the 20th ACM In-
ternational Symposium on Mobility Management and
Wireless Access, pages 97–104.
Tannoury, P., Chouali, S., and Hammad, A. (2023). Joint
use of sysml and reo to specify and verify the compati-
bility of cps components. In International Conference
on Formal Aspects of Component Software, pages 84–
102. Springer.
Thule, C., Lausdahl, K., Gomes, C., Meisl, G., and Larsen,
P. G. (2019). Maestro: the into-cps co-simulation
framework. Simulation Modelling Practice and The-
ory, 92:45–61.
Tripathi, D., Singh, L. K., Tripathi, A. K., and Chaturvedi,
A. (2021). Model based security verification of cyber-
physical system based on petrinet: A case study of
nuclear power plant. Annals of Nuclear Energy,
159:108306.
Vladimiriovich, M. A., Alexandrovich, V. A., and Ole-
govich, R. D. (2015). Automatic translation uml ac-
tivity diagrams to petri net. In 2015 International
Siberian Conference on Control and Communications
(SIBCON), pages 1–4. IEEE.
Wade, J., Cohen, R., Blackburn, M., Hole, E., and
Bowen, N. (2015). Systems engineering of cyber-
physical systems education program. In Proceedings
of the WESE’15: Workshop on Embedded and Cyber-
Physical Systems Education, pages 1–8.
Walia, G. S., Kumar, D., Sanger, J., and Sahana, S. (2024).
Cyber physical system and enabling technologies:
Opportunity, challenges, and applications. Security
and Risk Analysis for Intelligent Cloud Computing,
pages 128–143.
Wang, S., Yan, C., and Xiao, F. (2012). Quantitative energy
performance assessment methods for existing build-
ings. Energy and buildings, 55:873–888.
Yu, Z., Gao, H., Cong, X., Wu, N., and Song, H. H. (2023).
A survey on cyber-physical systems security. IEEE
Internet of Things Journal.
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
288
