
A Webcam Artificial Intelligence-Based Gaze-Tracking Algorithm
Saul Figueroa
1 a
, Israel Pineda
2 b
, Paulina Vizca
´
ıno
3 c
, Iv
´
an Reyes-Chac
´
on
3 d
and Manuel Eugenio Morocho-Cayamcela
1,2 e
1
Yachay Tech University, School of Mathematical and Computational Sciences, DeepARC Research Group, Hda. San Jos
´
e
s/n y Proyecto Yachay, Urcuqu
´
ı, 100119, Ecuador
2
Universidad San Francisco de Quito, College of Science and Engineering, Quito, 170901, Ecuador
3
Universidad Internacional del Ecuador, Faculty of Technical Sciences, School of Computer Science,
Quito, 170411, Ecuador
fi
Keywords:
Gaze-Tracking, Artificial Intelligence, Human-Computer Interaction, Visual Attention, Gaze Prediction.
Abstract:
Nowadays, technological advancements for supporting human-computer interaction have had a big impact.
However, most of those technologies are expensive. For that reason, building a webcam gaze-tracking system
represents a computationally cost-effective approach. The gaze-tracking technique focuses on tracking the
gaze direction and estimating its coordinates over a computer screen to follow user visual attention. This
research presents a gaze estimation approach to predict the user’s gaze direction using a webcam artificial
intelligence-based gaze-tracking algorithm. The purpose of this paper is to train a convolutional neural network
model capable of predicting a 3D gaze vector to estimate then the 2D gaze position coordinates over a computer
screen. To perform this task, three steps are followed: 1) Pre-processing the input, crop facial, and eye
images from the MPIIFaceGaze dataset. 2) Train a customized network based on a ResNet-50 pre-trained on
ImageNet for gaze vector predictions. 3) 3D gaze vectors conversion to 2D point of gaze on the screen. The
results demonstrate that our model outperforms the state-of-the-art VGG-16 model under the same dataset by
up to ∼ 33%. Data and source code is available at: https://github.com/SaulFigue/Gaze-tracking-pipeline.git.
1 INTRODUCTION
The human visual attention study is one of the mo-
tivations for analyzing eye movements and estimat-
ing gaze by computer vision techniques. The gaze-
tracking technique aims to track and estimate gaze
position from the facial and eye regions of an indi-
vidual (Liu et al., 2022). Understanding the cognitive
process of people’s attention and how they react to
a specific task helps to comprehend visual attention
study. In addition, facial expressions are one depen-
dent variable that improves the analysis of this com-
puter vision task (Dilini et al., 2021).
Although eye-tracking and gaze-tracking tech-
niques can work together to perform multiple appli-
cations, we decided to develop a gaze-tracking al-
gorithm. One of the reasons that support our selec-
a
https://orcid.org/0000-0001-9395-5903
b
https://orcid.org/0000-0002-3950-2169
c
https://orcid.org/0000-0001-9575-3539
d
https://orcid.org/0009-0002-2731-5531
e
https://orcid.org/0000-0002-4705-7923
tion is that most eye-tracking systems need specific
hardware devices (Holmqvist and Andersson, 2017),
which are highly expensive and invasive hardware to
acquire (Krafka et al., 2016). On the other hand, there
exist gaze-tracking systems that use default laptop
webcams (a few of them are described in Section 2),
which represent a low-cost implementation for track
and estimating gaze direction. Furthermore, gaze-
tracking systems involve more features than eye re-
gions when estimating gaze. Incorporating head ori-
entation into the gaze estimation model complements
gaze estimation predictions by considering head pose
information such as the head declination informa-
tion(Cazzato et al., 2020).
Currently, new artificial intelligence methods have
been introduced into gaze-tracking systems to im-
prove the accuracy of gaze-estimation prediction and
its analysis. Deep learning algorithms are usually
found in the literature (de Lope and Gra
˜
na, 2022),
and multiple variations of convolutional neural net-
work (CNN) methods are implemented for tracking
the gaze (Chen et al., 2020).
228
Figueroa, S., Pineda, I., Vizcaíno, P., Reyes-Chacón, I. and Morocho-Cayamcela, M.
A Webcam Artificial Intelligence-Based Gaze-Tracking Algorithm.
DOI: 10.5220/0012759700003753
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Conference on Software Technologies (ICSOFT 2024), pages 228-235
ISBN: 978-989-758-706-1; ISSN: 2184-2833
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

Gaze estimation is a computer vision task that in-
volves converting gaze directions into screen posi-
tions. This technique is useful when working with
artificial intelligence on a real-time webcam approach
by improving human gaze direction prediction with a
significant accuracy (Ou et al., 2021).
This paper proposes a Deep learning-based gaze-
tracking algorithm to estimate gaze direction using a
pre-trained on ImageNet ResNet-50 model and MPI-
IFaceGaze public and available gaze-tracking dataset.
Furthermore, a comparison between benchmark pro-
posed model for their study of efficiency in real-time
webcam gaze tracking system (Gudi et al., 2020) and
our proposed model is presented to test our gaze-
estimation system effectiveness.
2 RELATED WORKS
2.1 Human Gaze Estimation Approach
Gaze-tracking systems involve many human-face-
eyes features. The eye region is one of the main com-
ponents that help developers to build gaze-tracking
systems. There are two types of human gaze estima-
tion approaches.
2.1.1 Model-Based Techniques
Tracking gaze direction through 3D eye models using
geometric eye features is one of the objectives of the
model-based gaze estimation technique. Gaze points
are obtained by calculating the optical and visual axis
of eyes (Modi and Singh, 2021). Some researchers
obtained desirable results from this model-based tech-
nique for gaze-tracking systems. For example, esti-
mating gaze direction using 3D eye models and geo-
metric information to build a model-based gaze esti-
mation system (Kaur et al., 2022).
Facing refraction calculus represents a complex
task involving pupils. Therefore, a 3D gaze estima-
tion method based on the iris features is a potential
approach (Liu et al., 2020). To estimate the gaze di-
rection, 3D human eye optical axis (OA) reconstruc-
tion is performed through the iris and cornea center.
Also, a visual axis (VA) is needed to calculate the
angle between the OA and VA, known as the kappa
angle. This process allows drawing the line of sight
using a single light and camera source.
2.1.2 Appearance-Based Techniques
Machine learning and Deep learning are the two most
commonly used techniques for building appearance-
based gaze estimation systems (Modi and Singh,
2021).
Conventional Appearance-Based Methods.
When referring to conventional appearance-based
methods, implementations involve a multilevel
Histogram of Oriented Gradient (HOG) features
extraction approach to infer gaze by processing
an eye-appearance features extraction followed
by a personal calibration (Martinez et al., 2012).
An Adaptive Linear Regression (ALR) method
to map high-dimensional eye image features to
low-dimensional gaze positions is another approach,
where the sub-pixel alignment method helps to solve
the face-head motion problem. By this means, the
computational cost can be reduced significantly.
Additionally, using fixed, smaller training sample
sets can help achieve high accuracy, facing some
conventional appearance-based challenges (Lu et al.,
2014).
Appearance-Based Methods with Deep Learning.
The Gaze-Net system, trained on MPIIGaze and re-
trained by transfer learning technique on Columbi-
aGaze datasets, is a capsule network approach for
appearance-based gaze estimation (Mahanama et al.,
2020). This network receives eye images as input
and returns two results: A reconstructed image and
gaze estimation coordinates. The Gaze-net architec-
ture performs a classification training process with 6
classes of gaze direction. The transfer learning pro-
cess re-trains the gaze estimator with accurate results
by considering that one single eye image is enough to
estimate gaze reliably. The same conclusion was pro-
vided by a study of efficiency in real-time webcam
gaze tracking system (Gudi et al., 2020). Their work
intended to obtain the best performance in speed and
effort terms for estimating gaze. A CNN is used to
process face, eyes, and single-eye input images. In
addition, the authors find that geometric regression
calibration performs better than machine learning and
hybrid geometric approaches. A pre-trained on Ima-
geNet VGG-16 neural network model is used to cal-
culate gaze vectors. In addition, the system was tested
with MPIIFaceGaze and EYEDIAP datasets. One key
finding in Gudi et al. work is that using single-eye im-
ages (left or right) performs better than using left and
right-eye images since it enhances the computational
speed and effort for calibration processes.
A Webcam Artificial Intelligence-Based Gaze-Tracking Algorithm
229

2.2 Gaze-Tracking Applications
2.2.1 Human-Computer Interaction (HCI)
One of the most attractive applications of gaze-
tracking is using gaze and head movement to control
computer functions without using hands. A proper
implementation based on this purpose involves the
face detection algorithm and the iBUG 300-W dataset
as the core. Then, developing a simpler mouse as-
sistance system for motor-disable people represents a
huge advance in HCI (Anantha Prabha et al., 2022).
One step further is to combine mouse and key-
board functions to develop a real-time HCI gaze
tracking system. This approach can be handled by
two principal steps: Eye state (opened or closed)
recognition and a CNN gaze estimation model to pre-
dict the point of gaze (x, y) over the screen (Huang
et al., 2021).
2.2.2 Visual Attention
During the last few years, interest in studying the
visual attention behavior of people of different ages
has increased. Related works investigated the vi-
sual intention influence of textual and graphical in-
formation images over 30 participants divided into
three age groups. Using a real-time low-cost web-
cam gaze-tracking system helped to determine that
younger users tend to give more attention to graphi-
cal information images, while older ones lean for tex-
tual information (Sabab et al., 2022). On the other
hand, OWLET architecture is capable of estimating
127 ∼ 7-month-old infants’ visual attention by fol-
lowing face, eye, pupil extraction process, ecologi-
cally grounded gaze direction, and point of gaze es-
timation process from the video input of the infant
(Werchan et al., 2022).
2.2.3 Cognitive Processes
Multiple researchers have led their studies inves-
tigating the cognitive processes of the educational
field through eye-gaze-tracking system approaches.
For example, using eye-tracking and artificial in-
telligence to investigate students’ motivation while
watching Massive Open Online Course (MOOC) lec-
tures (Sharma et al., 2020).
Looking forward, gaze-tracking systems can work
as a cognitive analysis tool to examine the relation
between students’ engagement and facial emotion in
combination with eye and head movements informa-
tion to help teachers make the learning environment
effective (Sharma et al., 2023).
3 SYSTEM MODEL AND
METHODOLOGY
This section provides detailed implementation prop-
erties needed for executing the gaze-tracking system.
Additionally, the pipeline of the proposed method
is based on the benchmark paper for further com-
parisons. All the hyper-parameters and architectures
used to perform this task are presented.
3.1 Dataset
We use the public MPIIFaceGaze (Zhang et al., 2017)
dataset to train the model. It consists of 37, 667 face
images of 448×448 pixels from 15 participants. Fig-
ure 1 illustrates a sample of facial images of the MPI-
IFaceGaze dataset.
Figure 1: MPIIFaceGaze dataset sample images of the fa-
cial region for each participant.
For every participant, 2D and 3D gaze annotations
are provided. The relevance of using this dataset is
its variety of illumination, skin color, eye accessories,
and facial features of participant images. All of these
collected images were taken from a laptop webcam
source, simulating real-world scenarios. Moreover,
the MPIIFaceGaze dataset has an annotation text file
for each participant, where gaze location in screen co-
ordinates, facial landmark points, 3D head pose and
extrinsic parameters in camera coordinates, gaze ori-
gin, and 3D gaze target location are some of the most
used information provided by this dataset.
3.2 Proposed Model
The pipeline proposed for the gaze estimation system
is presented in Figure 2. Three main building blocks
are needed to develop the gaze estimation task based
on CNN architectures.
ICSOFT 2024 - 19th International Conference on Software Technologies
230
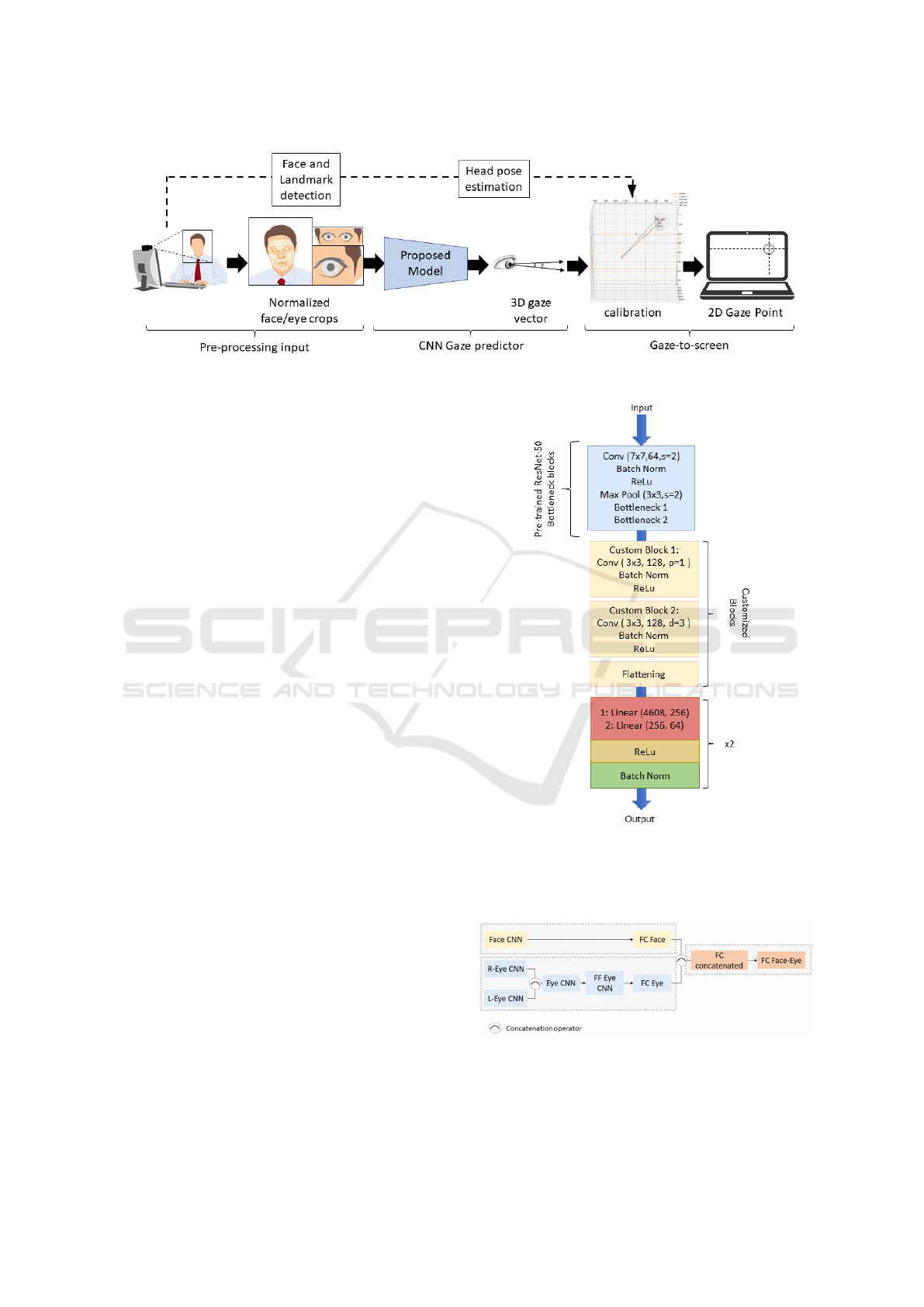
Figure 2: Complete pipeline representation for the artificial intelligence-based gaze-tracking algorithm.
3.2.1 Pre-Processing Block
In this first building block, facial images are pro-
cessed to obtain normalized and cropped images be-
fore moving to the CNN model gaze predictor. Using
the annotation information provided by the dataset,
facial features and eye regions can be found easily.
Since some of the images inside the dataset present
head pose inclination, we perform an alignment pro-
cess using the 6 landmark points and 3D face model
to build rotation and translation matrices. Moreover,
before dividing the complete dataset into 3 subsets:
Training, testing, and validation, we need to remove
those erroneous data from those gaze points not in the
screen size. Then, we decide to divide these subsets
into 15 participants. 13 are for training, and the miss-
ing two are for testing and validation. All of these
processes help to get the final normalized face and
eye crop images to get into the CNN model.
3.2.2 CNN Gaze Predictor Model
In contrast with the benchmark paper, the pre-
trained VGG-16 network architecture is replaced by
a ResNet-50 model pre-trained on ImageNet to pre-
dict pitch and yaw angles with respect to the camera
by using the pre-processed output images. For a fur-
ther comparison between both models, the same pre-
processed MPIIFaceGaze dataset is used for the train-
ing process. Figure 3 illustrates the proposed face
CNN architecture model. A similar architecture is
used for the eyes CNN model.
In addition, the complete architecture is presented
in Figure 4, where L-Eye CNN and R-Eye CNN rep-
resent the proposed CNN model architecture for eyes
images; Eye CNN is the concatenated model for both
L and R Eye CNN; FF Eye CNN is the feature fu-
sion process of the Eye CNN block; FC Eye repre-
sents the fully connected layer for the FF Eye CNN
block; Face CNN is the proposed model architecture
for facial images; FC Face represents the fully con-
Figure 3: Proposed CNN model for gaze direction predic-
tion: Facial images inputted on a pre-trained ResNet-50
model with the first two Bottleneck stage blocks and two
customized convolutional blocks added, plus flatten linear
layers.
Figure 4: Proposed forward architecture for gaze estima-
tion.
A Webcam Artificial Intelligence-Based Gaze-Tracking Algorithm
231

nected layer for Face CNN block; FC concatenated is
the combined block after a concatenation process of
both face and eye fully connected layers; FC Face-
Eye represents the final fully connected layer for all
the system model.
For the training process, some parameters are
considered: 96 × 96 pixels pre-processed facial im-
ages from the MpiiFaceGaze dataset; 64 × 96 pixels
pre-processed eyes images from the MpiiFaceGaze
dataset; 50 epochs; 10
−5
learning rate value; Adam
optimizer.
The ground truth gaze vector is compared with
predicted ones to analyze how accurate this model
is. Moreover, the mean angular error from the gaze
vector of each participant is one of the principal per-
formance metrics to be evaluated. Then, let k be
the number of sample images with random gaze tar-
get points generated. Random calibration (RC) sam-
ples describe the randomly positioned targets over
the sample images based on k value. Furthermore,
comparing the benchmark and proposed model per-
formances can give us an idea of how accurate our
proposed model is compared to previous literature.
3.2.3 Gaze-to-Screen Mapping Method
To translate the coordinates of the gaze vector to the
screen, a geometric relation is applied between the
camera and the screen coordinates system. For this
process, the predicted gaze vector in camera coordi-
nates must be calibrated to gaze points in screen co-
ordinates.
Screen Calibration. To perform this task, we fol-
low the geometry-based calibration method used in
the benchmark paper as a guide. First, individual eye
location is estimated in the screen coordinate system
(x, y, z) by fixate gaze over a specific (x, y) point on the
screen and considering z as the distance between indi-
vidual and screen. Then, the subject was asked to look
at specific points over the screen while the CNN gaze
predictor model records eye movements and gaze di-
rections. In addition, we assume that the camera’s
position is the same as the default laptop’s webcam
location (top-mid). Once the pitch angle is obtained
from the previous process, rotation R and translation
T matrices can be calculated by the following equa-
tion:
R =
1 0 0
0 cos(ρ) −sin(ρ)
0 sin(ρ) cos(ρ)
(1)
T = e
scs
− R · e
ccs
(2)
Where ρ is the estimated pitch angle, e
scs
is the
eye location in the screen coordinates system, and e
ccs
is the eye location in the camera coordinates system
obtained from eye landmark points. Next, all eye lo-
cations on the screen coordinate system can be ob-
tained by using the same rotation and translation ma-
trices. The following equation represents this defini-
tion:
ˆe
scs
= R · ˆe
ccs
+ T (3)
Where ˆe
scs
represents any eye location in the
screen coordinates system and ˆe
ccs
represents any eye
location in the camera coordinates system. Finally,
from ˆe
scs
we can extract ˆx
scs
and ˆy
scs
mapped values.
4 RESULTS AND DISCUSSIONS
4.1 Mean Angular Error Analysis
Table 1 presents the mean angular error for each one
of the participants evaluated on both models.
Table 1: Mean angular error comparison between bench-
mark network based on VGG-16 architecture and proposed
network based on ResNet-50 architecture accuracy with
k = [9, 128] random calibration samples.
Benchmark Proposed
Participants
\Models
RC
k = 9
RC
k = 128
RC
k = 9
RC
k = 128
p00 1.780 1.676 2.102 1.997
p01 1.899 1.777 2.994 2.845
p02 1.910 1.790 1.266 1.193
p03 2.924 2.729 1.879 1.767
p04 2.355 2.239 1.411 1.341
p05 1.836 1.720 1.358 1.284
p06 2.569 2.464 1.769 1.705
p07 3.823 3.599 1.994 1.883
p08 3.778 3.508 2.454 2.304
p09 2.695 2.528 1.313 1.234
p10 3.241 3.126 1.506 1.431
p11 2.668 2.535 1.434 1.365
p12 2.204 1.877 1.391 1.240
p13 2.914 2.753 1.650 1.547
p14 2.161 2.010 1.359 1.280
mean 2.584 2.422 1.725 1.628
Results demonstrate an improvement in terms of
mean angular error achieved by the proposed architec-
ture. Moreover, for k = 9 RC samples, the benchmark
paper results were improved by up to 33.24% compar-
ing 1.725 degrees to 2.584 degrees. In the same way,
ICSOFT 2024 - 19th International Conference on Software Technologies
232

for k = 128 RC samples, the benchmark paper results
were improved by up to 32.78% comparing 1.628 de-
grees to 2.422 degrees.
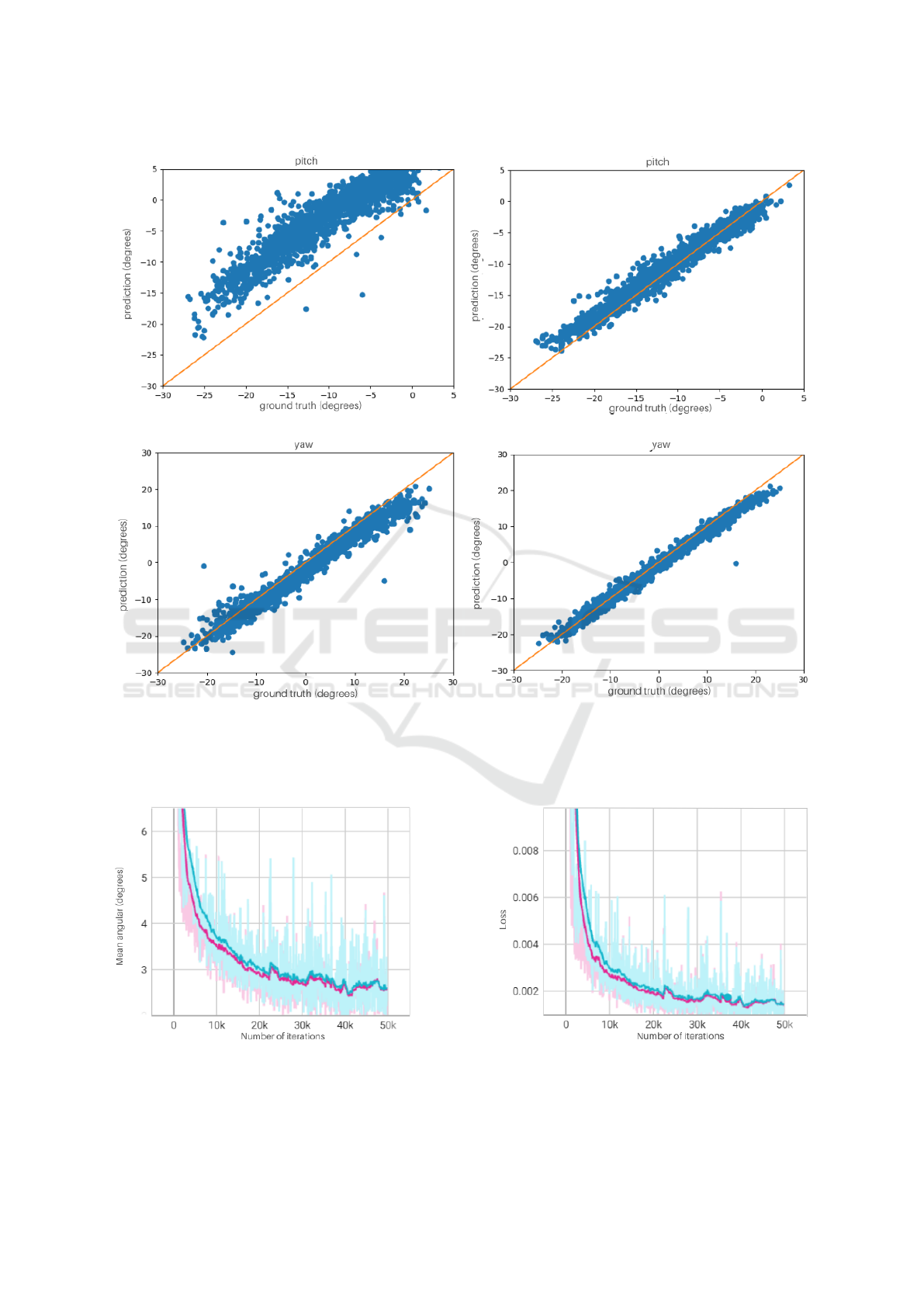
4.2 Pitch and Yaw Prediction Analysis
A comparison between pitch and yaw predicted val-
ues for both models is presented in Figure 5.
Pitch and Yaw prediction values are key outputs
for the gaze estimation system. To evaluate those re-
sults, scatter relation plots for pitch and yaw predic-
tion of both models are given for one of the partici-
pants as a sample test. Figure 5 plots the pitch and
yaw representation predicted values over the ground
truth for participant 13. One big difference between
these two models is that the proposed model based
on ResNet-50 architecture performed better than the
benchmark model based on VGG-16 architecture.
This difference is appreciated from Figure 5b and Fig-
ure 5a pitch representations, where the first shows a
not desirable relation between these two axes, while
the last one keeps a better relation. This analysis
is also interpreted for yaw plots in Figure 5d and
Figure 5c, where the last one, our proposed model,
presents a sharpened relation results in comparison
with the benchmark model plot. These results are
supported by considering that our customized net-
work uses the first ResNet-50 pre-trained blocks until
the second bottleneck, which contains more convolu-
tion layers than the benchmark architecture with only
four convolution blocks of the VGG-16 pre-trained
model. Moreover, the residual information collected
by ResNet architecture keeps more feature informa-
tion useful for learning. This model aims to extract
more features from the input data, increasing the in-
formation quality and optimizing the gradient back-
propagation to avoid losing important information in
the process.
4.3 Training Performance Analysis
Figure 6 illustrates the performance during training
for the benchmark and proposed model.
Since gaze direction precision involves angle met-
rics, and to better compare benchmark gaze vector
results, we decided to evaluate the angular error by
plotting it over each iteration in the training process
to evaluate the proposed model performance. Addi-
tionally, a train-loss plot is generated to check if the
loss error over the training process keeps decreasing.
Both results are visualized in Figure 6. Figure 6a
shows that between [0 − 20]K training iterations, the
angular error keeps over 3 for both models, represent-
ing bad accuracy results. However, after more iter-
ations, this angular error decreased. The sharpened
light-purple curve (bottom one) better illustrates this
result and decreases faster than the benchmark train-
ing process (light-blue). In the same way, this light-
purple curve in Figure 6b follows a desired decreasing
tendency result for the loss values after each iteration
in the training process compared with benchmark one.
5 CONCLUSIONS
In conclusion, this research proposes an artificial
intelligence-based gaze-tracking algorithm that uses
a built-in laptop webcam to predict the user’s point of
gaze on a computer screen. The proposed model in-
volves a customized ResNet-50 network pre-trained
on ImageNet, enhancing the performance and accu-
racy compared to traditional models such as the one
used in benchmark one. This architecture, trained on
the MPIIFaceGaze dataset, allows us to build a 3D
gaze vector predictor that is translated to 2D screen
coordinates with the help of a calibration process.
The results indicate that the proposed system can
accurately predict the user’s gaze direction. More-
over, the proposed model outperforms the benchmark
by up to ∼ 33% in terms of mean angular error, in-
creasing our gaze-tracking system’s reliability and
significantly improving the human-computer interac-
tion experience.
Undoubtedly, the potential application of gaze-
tracking systems bridges the gap in how we interact
with computers in a hands-free system.
6 LIMITATIONS FOUND
In fact, each built-in laptop webcam has its camera
parameters: intrinsic and extrinsic. This leads to the
calibration process being unique and dependent on the
webcam used in the implementation. Then, the rota-
tion matrix R and translation vector T depend on the
camera’s features.
During the point of gaze estimation test, the dis-
tance between the laptop’s camera and the user was
fixed at 50−60cm. However, the accuracy of the gaze
estimation predictions for different distance ranges
was not covered by the proposed system in this work.
7 FUTURE WORKS
We encourage readers and all practitioners in this re-
search area to address the limitations identified by our
A Webcam Artificial Intelligence-Based Gaze-Tracking Algorithm
233
(a) (b)
(c) (d)
Figure 5: Pitch and Yaw scatter plot relation between predicted output and ground truth values for participant 13. (a) and
(c) represent the accuracy between the predicted gaze vector and the ground truth vector in degrees by using the benchmark
customized VGG-16 trained model; (b) and (d) represent the accuracy between the predict gaze vector and the ground truth
vector in degrees by using the proposed trained model.
(a) (b)
Figure 6: Graph representation of the training process using both models, the light-blue curve (upper one) refers to the
benchmark model, and the light-purple curve (bottom one) refers to the proposed model. (a) Train/angular-error plot between
50K iterations and angular error values for y−axis; (b) Train/loss plot for 50K iterations.
ICSOFT 2024 - 19th International Conference on Software Technologies
234

system. They can replicate this proposed implemen-
tation using their own laptops’ webcams and evaluate
the accuracy of their systems. Additionally, varying
the distance between the camera and the users’ eyes
is an important factor to be tested during experiments.
Furthermore, implementing a new customized archi-
tecture based on the methodology provided in this pa-
per could be a proper approach in this field. An ini-
tial starting point to improve the results presented in
this work will be to modify some hyper-parameters to
conduct more in-depth tests on the proposed architec-
ture.
Finally, we find gaze-tracking algorithm applica-
tions useful, and we certainly will continue develop-
ing some of those described in Section 2.2 as part of
our future work and invite readers to explore a wide
range of applications, such as a shooter game aim as-
sistant, mouse assistant controller for disabled people
to use in driving a vehicle, or even neuromarketing
studies based on visual attention analysis as a solu-
tion for products or ad placement in websites like e-
commerce or social media pages.
REFERENCES
Anantha Prabha, P., Srinivash, K., Vigneshwar, S., and
Viswa, E. (2022). Mouse assistance for motor-
disabled people using computer vision. In Proceed-
ings of International Conference on Recent Trends in
Computing, pages 403–413. Springer.
Cazzato, D., Leo, M., Distante, C., and Voos, H. (2020).
When I look into your eyes: A survey on computer
vision contributions for human gaze estimation and
tracking. Sensors, 20(13):3739.
Chen, H.-H., Hwang, B.-J., Wu, J.-S., and Liu, P.-T. (2020).
The effect of different deep network architectures
upon cnn-based gaze tracking. Algorithms, 13(5):127.
de Lope, J. and Gra
˜
na, M. (2022). Deep transfer learning-
based gaze tracking for behavioral activity recogni-
tion. Neurocomputing, 500:518–527.
Dilini, N., Senaratne, A., Yasarathna, T., Warnajith, N.,
and Seneviratne, L. (2021). Cheating detection in
browser-based online exams through eye gaze track-
ing. In 2021 6th International Conference on Informa-
tion Technology Research (ICITR), pages 1–8. IEEE.
Gudi, A., Li, X., and van Gemert, J. (2020). Efficiency in
real-time webcam gaze tracking. In Computer Vision–
ECCV 2020 Workshops: Glasgow, UK, August 23–
28, 2020, Proceedings, Part I 16, pages 529–543.
Springer.
Holmqvist, K. and Andersson, R. (2017). Eye tracking:
A comprehensive guide to methods. paradigms and
measures.
Huang, J., Zhang, Z., Xie, G., and He, H. (2021). Real-time
precise human-computer interaction system based on
gaze estimation and tracking. Wireless Communica-
tions and Mobile Computing, 2021.
Kaur, H., Jindal, S., and Manduchi, R. (2022). Rethink-
ing model-based gaze estimation. Proceedings of
the ACM on computer graphics and interactive tech-
niques, 5(2).
Krafka, K., Khosla, A., Kellnhofer, P., Kannan, H., Bhan-
darkar, S., Matusik, W., and Torralba, A. (2016). Eye
tracking for everyone. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 2176–2184.
Liu, J., Chi, J., Hu, W., and Wang, Z. (2020). 3d model-
based gaze tracking via iris features with a single cam-
era and a single light source. IEEE Transactions on
Human-Machine Systems, 51(2):75–86.
Liu, J., Chi, J., Yang, H., and Yin, X. (2022). In the eye
of the beholder: A survey of gaze tracking techniques.
Pattern Recognition, page 108944.
Lu, F., Sugano, Y., Okabe, T., and Sato, Y. (2014). Adap-
tive linear regression for appearance-based gaze esti-
mation. IEEE transactions on pattern analysis and
machine intelligence, 36(10):2033–2046.
Mahanama, B., Jayawardana, Y., and Jayarathna, S. (2020).
Gaze-net: Appearance-based gaze estimation using
capsule networks. In Proceedings of the 11th aug-
mented human international conference, pages 1–4.
Martinez, F., Carbone, A., and Pissaloux, E. (2012). Gaze
estimation using local features and non-linear regres-
sion. In 2012 19th IEEE International Conference on
Image Processing, pages 1961–1964. IEEE.
Modi, N. and Singh, J. (2021). A review of various state of
art eye gaze estimation techniques. Advances in Com-
putational Intelligence and Communication Technol-
ogy: Proceedings of CICT 2019, pages 501–510.
Ou, W.-L., Kuo, T.-L., Chang, C.-C., and Fan, C.-P. (2021).
Deep-learning-based pupil center detection and track-
ing technology for visible-light wearable gaze track-
ing devices. Applied Sciences, 11(2):851.
Sabab, S. A., Kabir, M. R., Hussain, S. R., Mahmud, H.,
Hasan, M., Rubaiyeat, H. A., et al. (2022). Vis-itrack:
Visual intention through gaze tracking using low-cost
webcam. arXiv preprint arXiv:2202.02587.
Sharma, K., Giannakos, M., and Dillenbourg, P. (2020).
Eye-tracking and artificial intelligence to enhance mo-
tivation and learning. Smart Learning Environments,
7(1):1–19.
Sharma, P., Joshi, S., Gautam, S., Maharjan, S., Khanal,
S. R., Reis, M. C., Barroso, J., and de Jesus Filipe,
V. M. (2023). Student engagement detection using
emotion analysis, eye tracking and head movement
with machine learning. In Technology and Innovation
in Learning, Teaching and Education: Third Interna-
tional Conference, TECH-EDU 2022, Lisbon, Portu-
gal, August 31–September 2, 2022, Revised Selected
Papers, pages 52–68. Springer.
Werchan, D. M., Thomason, M. E., and Brito, N. H. (2022).
Owlet: An automated, open-source method for infant
gaze tracking using smartphone and webcam record-
ings. Behavior Research Methods, pages 1–15.
Zhang, X., Sugano, Y., Fritz, M., and Bulling, A. (2017).
It’s written all over your face: Full-face appearance-
based gaze estimation. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion workshops, pages 51–60.
A Webcam Artificial Intelligence-Based Gaze-Tracking Algorithm
235
