
Federated Road Surface Anomaly Detection Using Smartphone
Accelerometer Data
Oussama Mazari Abdessameud
a
and Walid Cherifi
Dept. Computer Science, Ecole Militaire Polytechnique, Algiers, Algeria
Keywords:
Road Anomaly Detection, Smartphone, GPS Turn-by-Turn Navigation, Federated Learning.
Abstract:
Road surface conditions significantly impact traffic flow, vehicle integrity, and driver safety. This importance
is magnified in the context of service vehicles, where speed is often the only recourse for saving lives. Detect-
ing road surface anomalies, such as potholes, cracks, and speed bumps, is crucial for ensuring smooth and safe
driving experiences. Taking advantage of the widespread use of smartphones, this paper introduces a turn-
by-turn navigation system that utilizes machine learning to detect road surface anomalies using accelerometer
data and promptly alerts drivers. The detection model is personalized for individual drivers and continuously
enhanced through federated learning, ensuring both local and global model improvements without compromis-
ing user privacy. Experimental results showcase the detection performance of our model, which continually
improves with cumulative user contributions.
1 INTRODUCTION
Roads are fundamental to transportation networks, fa-
cilitating seamless connectivity and mobility. A ro-
bust road network enables efficient travel for individ-
uals and the transportation of goods. However, vari-
ous natural and human-induced factors can contribute
to road surface damage, resulting in the formation
of potholes, cracks, and other irregularities. While
potholes and cracks typically arise from natural wear
and tear, speed bumps represent a deliberate interven-
tion by human actors to achieve specific traffic man-
agement objectives. Nonetheless, poorly designed or
maintained speed bumps can also pose safety hazards,
increasing the risk of accidents and injuries, particu-
larly when drivers are unaware of their presence or
fail to perceive them.
Road anomalies, including defects and speed
bumps, pose significant risks to both human occu-
pants and vehicular components. Indeed, encounter-
ing road surface anomalies at high speeds can lead
to vehicle damage, malfunctioning of vehicle com-
ponents, or even injury to occupants (Kosakowska,
2022). Proactive measures are essential for mitigating
these risks. Drivers can take precautions by reducing
their speed before traversing a speed bump or encoun-
tering surface irregularities. However, the challenge
a
https://orcid.org/0000-0001-7198-8974
becomes more pronounced when drivers are unaware
of upcoming anomalies on their route. In such scenar-
ios, the need for an automatic solution becomes im-
perative. By leveraging technology, such as advanced
sensors and real-time monitoring systems, drivers can
be automatically notified of impending anomalies, en-
abling them to take necessary precautions and adapt
their driving behavior accordingly. An automatic so-
lution enhances driver awareness and safety and con-
tributes to the overall efficiency and maintenance of
road infrastructure.
Smartphones with GPS and navigation systems
have transformed driving habits, allowing for effi-
cient route navigation. Integrating automatic road
anomaly notifications seamlessly complements these
habits, providing timely alerts during journeys. Es-
tablishing a comprehensive database of road surface
anomalies is essential, facilitated by crowd-sourcing
from drivers via automated marking. Smartphones’
accelerometer sensors capture signals reflecting the
vehicle’s acceleration, enabling precise identification
and location of road surface anomalies when coupled
with GPS data.
Classifying the footprint left in the acceleration
signal by road anomalies necessitates a pre-trained
classification model. Given potential variations in
signals generated by different phones and vehicles,
the model must be trained across various scenarios.
While data from different users could be used to re-
376
Mazari Abdessameud, O. and Cherifi, W.
Federated Road Surface Anomaly Detection Using Smartphone Accelerometer Data.
DOI: 10.5220/0012766200003756
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 13th International Conference on Data Science, Technology and Applications (DATA 2024), pages 376-383
ISBN: 978-989-758-707-8; ISSN: 2184-285X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

train the model, concerns about user privacy arise due
to the revealing nature of acceleration data, which
can disclose driving habits. Consequently, training
the classification model locally on users’ devices and
aggregating these models into a single global model
helps preserve user privacy.
This paper presents a proactive solution to en-
hance road safety by utilization of smartphone tech-
nology for real-time detection and notification of road
surface anomalies. It introduces a turn-by-turn nav-
igation system that exploits the widespread use of
smartphones equipped with GPS, navigation systems,
and accelerometer sensors. The system’s primary ob-
jective is to detect road surface anomalies in real-time
and provide prompt alerts to drivers to enhance road
safety. Through machine learning techniques, the sys-
tem automatically detects and classifies road surface
anomalies based on the footprints observed in the ac-
celerometer data. Upon detecting an anomaly, the
system marks its location to alert approaching drivers.
Furthermore, to enhance detection performance, the
machine learning model undergoes additional train-
ing using user data. To address privacy concerns as-
sociated with user data, the system employs a feder-
ated learning approach. Local models are trained on
users’ devices, and the aggregated global model is uti-
lized for anomaly detection while safeguarding user
privacy.
2 RELATED WORKS
Al-Sabaeei et al. (2024) present a comprehensive
review of smartphone applications for road surface
monitoring. These applications predominantly rely
on two distinct approaches: vision-based data col-
lection and the analysis of acceleration and vibration
data. By exploiting these techniques, they aim to as-
sess the condition of road pavements.
Camera-based methods have shown promise in
detecting road surface defects and anomalies, with
reported accuracy levels ranging from 80% to 98%.
However, their effectiveness is influenced by fac-
tors like lighting conditions and image quality (Rahi-
man V et al., 2021; Lee et al., 2021; Kim and Kim,
2023). Despite their potential, vision-based methods
have limitations. These methods require stable ori-
entation of the smartphone camera towards the road
surface, which conflicts with our system’s objective
of providing real-time notifications and navigation to
users. As our system prioritizes positioning the smart-
phone camera facing the driver, this approach imposes
constraints on phone placement, rendering it unsuit-
able for our application.
On the other hand, the use of vibrations data also
depicts promising results. Chen et al. (2022) de-
veloped a convolutional neural network that based
on smartphones’ accelerometer data detects road sur-
face transverse cracks with a 97% accuracy. Mar-
tinelli et al. (2022) exploited the same accelerom-
eter data with with several machine learning tech-
niques including decision trees, support vector ma-
chine to detect with an accuracy ranging from 84%
to 97% in determining whether the road pavement
is distressed or not. Several similar works showed
that vibrations data are a reliable source for road sur-
face anomalies detection (Dong and Li, 2021; Shole-
var et al., 2022; Mazari Abdessameud et al., 2022;
Tomiło, 2023; Yuan et al., 2023). Therefore, the fu-
sion of vibration data and advanced machine learning
techniques holds great promise for improving road
safety.
Crowd-sourcing offers a valuable avenue for col-
lecting precise road anomaly locations. In their study,
Xin et al. (2023) propose a novel probabilistic-based
crowdsourcing technique. By aggregating data from
a large number of users, the accuracy of anomaly
detection and localisation can be significantly im-
proved. This approach effectively filters out poten-
tial false positives and false negatives by combining
dynamic events detected from various smartphones
onboard vehicles. Also, by harnessing this crowd-
sourced data, errors associated with GPS for anomaly
localisation is mitigated, leading to more reliable re-
sults.
In their recent work, Jeong and Jo (2024) in-
troduce a machine learning approach that leverages
crowdsourced data to evaluate pavement conditions.
Their methodology aims to develop classifiers by in-
corporating diverse data sources. However, a no-
table limitation arises: these classifiers are still con-
strained by the number of instances used during train-
ing since the classification model does not evolve. In-
terestingly, Jan et al. (2023) echo a similar concern
in their research. They emphasize that challenges in
pavement condition detection stem from differences
in sensing platforms and vehicle parameters. These
variations introduce complexities that impact the ac-
curacy and adaptability of detection models.
To address the limitations of static training of
classification models, the proposed solution involves
employing federated learning techniques. Federated
learning allows the model to adapt dynamically to dif-
ferent situations while preserving user data privacy.
By combining this approach to detection base on ac-
celerometer data and crowdsourcing for localisation,
we can create more effective and adaptable systems
for road safety.
Federated Road Surface Anomaly Detection Using Smartphone Accelerometer Data
377

3 METHODOLOGY
Driving over road surface anomalies without prior no-
tice can jeopardize driver safety and vehicle integrity.
Therefore, drivers should be aware of road anoma-
lies along their routes. In this section, we elaborate
on how our system utilizes drivers data to detect the
presence of road surface anomalies. These detected
anomalies are stored in a central database and utilized
to alert subsequent drivers.
To streamline the use of our system, we en-
gage with end users through smartphones. These
devices offer users the ability to navigate their pre-
ferred routes while receiving alerts about upcoming
road surface anomalies along the way. Also, the ac-
celerometers embedded in these smartphones enable
automatic detection of new road surface anomalies,
enriching our database with real-time information.
To establish a robust and accurate database of
road surface anomalies, the system relies on user-
generated annotations. Users report encountered
anomalies, such as potholes or cracks, detected by the
integrated model. Each report includes details such
as the anomaly type, precise location using GPS co-
ordinates, and a confidence rate indicating the level
of confidence in the model’s detection, which can
be enhanced through continuous training. The sys-
tem consolidates confirmed anomalies by aggregating
reports for the same location, considering the confi-
dence scores associated with individual reports to de-
termine the anomaly type.
This methodology ensures that anomalies fre-
quently reported with high confidence levels are clas-
sified as confirmed, thereby enhancing the system’s
accuracy and reliability in identifying critical road
surface issues.
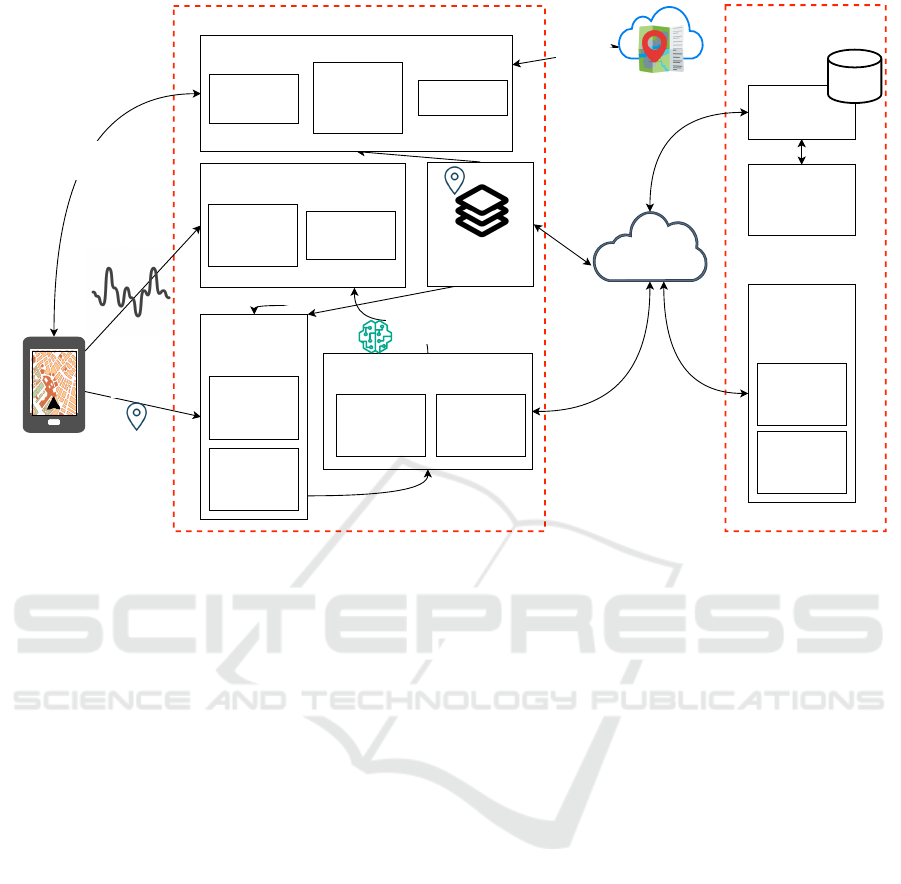
3.1 General Architecture
The proposed system comprises eight interconnected
modules designed to collect, process, and ana-
lyze data from various sources, ultimately provid-
ing timely notifications to drivers regarding upcoming
road anomalies. The general architecture of the pro-
posed system is illustrated in figure 1. These modules
are distributed over the client side and the server side.
On the client side, we deploy five modules to manage:
• Navigation: The system retrieves essential infor-
mation from a remote geographic database to cal-
culate routes for the user, facilitating navigation
along these routes with step-by-step directions.
Furthermore, this module provides notifications
regarding upcoming road surface anomalies to en-
sure user awareness and safety during the journey.
• Upcoming confirmed anomalies: Upon receiving
the user-selected route, the navigation module in-
terfaces with this module to obtain information
regarding confirmed anomalies along the chosen
route, including their locations. These anoma-
lies are subsequently utilized to notify the user
and evaluate the effectiveness of the automatic
anomaly detection module.
• Anomaly detection: To detect whether the vehicle
hit a road surface anomaly, the module receive ac-
celerometer signals. These signals are then sub-
jected to various operations, including reorienta-
tion from relative to absolute reference, and data
filtering to eliminate artifacts and unwanted noise.
The detection module retrieves one signal window
at a time and performs an inference on the data
(acceleration x, acceleration y, acceleration z and
velocity) using the detection model management
module. The result is a prediction vector indicat-
ing the class of the signal present in this window.
• Detection results verification: This involves the
interface of this module with the Upcoming
Confirmed Anomalies module, utilizing smart-
phone location data to compare the outcomes of
the anomaly detection module with confirmed
anomalies in the same location. Four scenarios
may arise: i. When the same type of anomaly is
detected, if the detection rate is low, accelerome-
ter data is utilized to augment the training of the
local model, thereby enhancing accuracy. ii. If
the model fails to detect a confirmed anomaly or
iii. identifies an anomaly with an incorrect type,
accelerometer data is employed to refine the lo-
cal model due to the model’s likely inaccuracy. iv.
In the event the model detects an anomaly not yet
confirmed, a flag is dispatched to the distant server
to report the anomaly’s existence. In this case,
accelerometer data awaits confirmation of the de-
tected anomaly’s type.
• Local detection model management: This module
manages the local detection module. It conducts
local model training using data collected from the
device. Additionally, the module facilitates com-
munication with the server to either contribute the
local detection model to the global model or up-
date the local model based on the received global
model.
These client modules interact with a server that man-
ages centralised actions and data. The server relies on
three modules to deal with:
• Road Anomalies Flags Storage: This module
maintains a record of the various flags received,
as well as the confirmed road anomalies. Each re-
DATA 2024 - 13th International Conference on Data Science, Technology and Applications
378
Server Side
Driver (user) Side
3D accelerations
data
Location
Registered
road anomalies
Routes for
navigation
Route and anomalies
notification
Detection results
Accelerations data
Detection
results
verification
Register new
anomaly
detection
Confirmed
anomaly not
detected
Anomalies
data fusion
module
Local detection
model management
Local model
training
Local model
update
Updated detection
model
Global
detection
model
management
Clients
models
management
Models
aggregation /
evaluation
Up coming confirmed
anomalies
Navigation module
Map and
anomalies
visualisation
Navigation
and
anomalies
warning
Routes
calculation
Anomalies detection module
ML
classification
Signal
acquisition
and filtering
Figure 1: General architecture of the proposed system.
ceived flag includes details such as anomaly type,
location, and flag reliability or confidence level.
Confirmed road anomalies are those flags with
high reliability or confidence levels.
• Anomalies data fusion: The aim of this module
is to achieve a consistent state of the anomaly
database. This data fusion process enables the
flags received from users to be combined, pro-
viding a more complete and accurate informa-
tion. Due to potential inaccuracies, flags from
various sources might describe the same anomaly
with different types and slightly varying locations.
To address this, the Anomalies data fusion mod-
ule employs a Weighted Majority Voting (WMV)
technique (Tao et al., 2018) to consolidate flags
for each anomaly and select the most reliable type.
This process involves three key steps: data clus-
tering, data fusion, and decision making. Sub-
section 3.3 describes the data fusion process flow.
This process effectively combines flags from vari-
ous contributors, resulting in a comprehensive and
reliable record of anomalies.
• Global detection model management: This mod-
ule ensures the update of the global detection
model, and the update of the different user’s lo-
cal models. The update of the global detection
model involves the aggregation of several local
users models. This process involves retrieving
weights from saved different users and combining
them using a predefined algorithm (e.g., FedAvg).
Finally, the resulting aggregated model undergoes
evaluation to assess its performance.
3.2 Anomaly Detection
The proposed system provides an efficient automatic
road anomaly detection service, leveraging smart-
phone capabilities to identify irregularities in road
surfaces. It is a well-known phenomenon for vehicles
to experience vibrations when encountering anoma-
lies such as potholes. These vibrations are captured
as a three-axis acceleration signal generated by the
smartphone’s integrated sensor. However, this sig-
nal is collected in the smartphone’s local coordinate
system, which depends on how the phone is mounted
in the vehicle. To overcome this challenge, the pro-
posed system employs an automatic correction ser-
vice that utilizes Euler angles to reorient the accel-
eration data. This approach eliminates the depen-
dence on the smartphone’s physical orientation, en-
suring consistent data interpretation regardless of how
the user mounts the phone. The reoriented signal can
still contain noise from non-informative vibrations,
such as constant engine hum. To address this, we
employ a high-pass filter. This filter removes low-
frequency data, effectively resulting in a filtered vi-
bration signal that’s more suitable for further process-
Federated Road Surface Anomaly Detection Using Smartphone Accelerometer Data
379
ing and anomaly detection. After preprocessing the
vibration signal, it is divided into equal-length sliding
windows to produce a series of consecutive samples.
Given the Long Short-Term Memory (LSTM)
neural networks’ demonstrated capability to automat-
ically extract pertinent features from raw time series
data and handle temporal dependencies, we advocate
for a stacked LSTM architecture comprising two hid-
den LSTM layers, each containing multiple memory
cells. This architecture is used to classify whether the
window of the captured signal represents a smooth
road or a road surface anomaly.
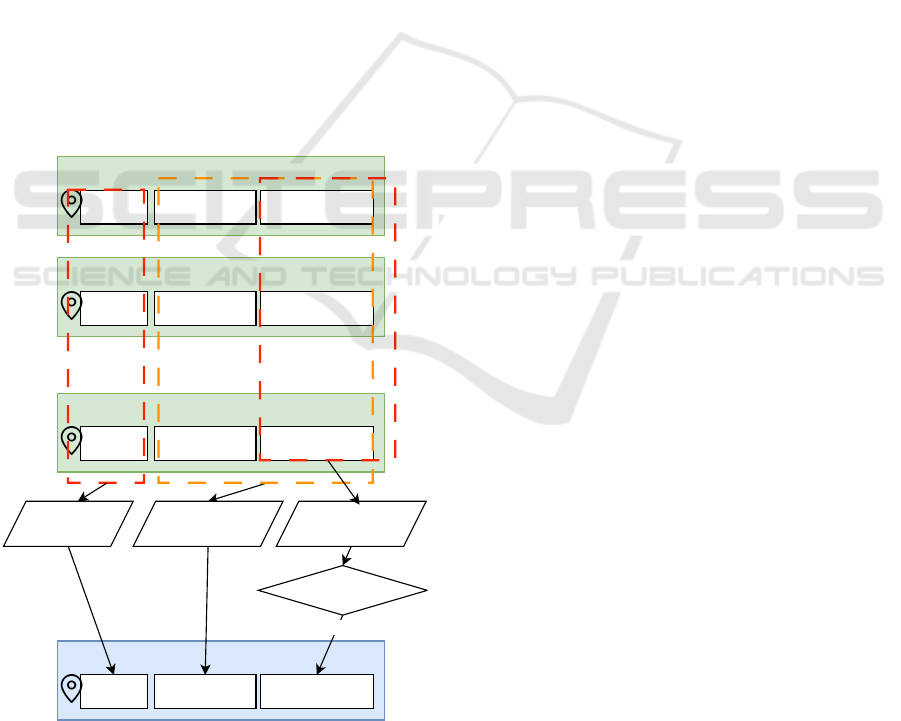
3.3 Anomalies Fusion
As the system relies on user input to detect road sur-
face anomalies, multiple flags may be received for
the same anomaly, each varying in reliability and po-
tentially indicating different anomaly types. Conse-
quently, when multiple flags are accumulated for the
same approximate location, a fusion process is ini-
tiated. As shown in figure 2, this fusion process
incorporates three pieces of information: location,
anomaly type, and confidence rating.
Flag n
Location n Anomaly type n Confidence rate n
Confirmed anomaly flag
Location Anomaly type Confidence rate 3
Flag 1
Location 1 Anomaly type 1 Confidence rate 1
Flag 2
Location 2 Anomaly type 2 Confidence rate 2
...
Average if ...
Weighted Majority
Voting
Sum if ...
YES
>= Thershold
Figure 2: Schema of the fusion process of Road surface
anomaly flags.
To determine the retained anomaly type, a WMV
approach is employed, with the confidence rating of
each flag used to weigh the different types. Once the
elected type is identified, if the sum of confidences of
the flags holding this type exceeds the defined thresh-
old, a confirmed road surface anomaly is generated.
However, if the threshold is not met, no conclusion is
drawn. In terms of location, the final location is deter-
mined as the average of all locations associated with
flags indicating the elected type.
3.4 Federated Detection Enhancement
The federated enhancement of the detection model re-
lies on the local and global detection model manage-
ment modules. These two modules interact with each
other to exchange model parameters. The local de-
tection model management module manages the lo-
cal model training using captured signals that were
wrongly classified. Global model management per-
forms the aggregation of the different models received
from users.
Local training is a crucial functionality designed
to refine the local model by utilizing data stored in
the local database. This feature is activated when the
system accumulates a substantial number of misclas-
sified signals. Upon retrieving the signal instances,
the local training module proceeds to acquire label
updates, as anomalies may have been removed or
changed type during the data fusion process. Subse-
quently, the training process is initiated, adhering to
pre-defined parameters such as the number of epochs.
Upon completion, the new weights of the resulting
model are applied locally for subsequent detection,
along with essential metadata such as the user iden-
tifier, dataset size used in training, and loss func-
tion. This iterative approach ensures the local model
is continuously updated and enhanced, leveraging re-
cent data to improve accuracy and anomaly detection
performance.
On the server side, a scheduled aggregation pro-
cess is implemented. The aggregation process com-
prises several steps. Firstly, the weights of models
trained locally by customers are retrieved. Next, an
aggregation operation is performed to combine these
weights using a FedAvg algorithm as described in al-
gorithm 1. The aggregation algorithm begins by cal-
culating the aggregate count of instances utilized in
training all local models for the current aggregation
cycle. Subsequently, each local model contributes
to the new model in proportion to the number of in-
stances employed for its individual training.
Once aggregation is complete, the resulting model
is evaluated to measure its performance. This involves
the use of a test and validation dataset to assess the
accuracy and quality of the aggregated model. De-
DATA 2024 - 13th International Conference on Data Science, Technology and Applications
380
pending on the results of the evaluation, a decision is
made regarding the deployment of the model. If the
aggregated model is deemed satisfactory, it is retained
as the new global detection model and made available
to users. This enables users to benefit from the im-
proved detection performance offered by the aggre-
gated model.
Data: Current global detection model, List of
users detection models with their
metadata
Result: Updated global detection model
Total Data Size ←
∑
Train Data Size
foreach local Model ∈ local Models do
size ← Train Dataset of local Model
Rate ← size / Total Data Size
Names, Weights ← Get local Model
parameters names and weights
foreach name ∈ Names do
New Global Model[name] ←
New Global Model[name] + (Rate
× Weights[name])
end
end
Save (New Global Model)
Algorithm 1: Local models aggregation algorithm.
4 EXPERIMENTAL SETUP AND
PERFORMANCE EVALUATION
The performance evaluation of the proposed system
comprises two main components. Firstly, the evalu-
ation of the initial detection model that was trained
using a public dataset. The second part consists of
performance evaluation of the same model after a fed-
erated learning phase.
4.1 Training Dataset and Evaluation
Metrics
We utilized the ”Pothole lab” dataset (Lab, 2016),
which comprises over 2500 instances of various road
surface anomalies, including speed bumps, metal
bumps, and potholes, alongside over 1500 instances
of smooth roads. This dataset offers a diverse range of
anomalies commonly encountered on roadways, en-
abling comprehensive evaluation of our detection sys-
tem’s performance. Each instance in the dataset pro-
vides acceleration data along three axes, facilitating
a detailed analysis of vehicle motion and response to
road surface conditions. To assess the effectiveness of
our system, we employed standard evaluation metrics,
including precision, recall, and F1-score. These met-
rics provide valuable insights into the system’s ability
to accurately detect and classify road surface anoma-
lies while minimizing false positives and negatives.
4.2 Initial Classification Model
Evaluation
To evaluate the effectiveness of the proposed clas-
sification model, we explored various combinations
of training hyperparameters. These parameters en-
compassed the number of iterations on the training
dataset, the window size representing an anomaly, the
overlap between windows, and the number of mem-
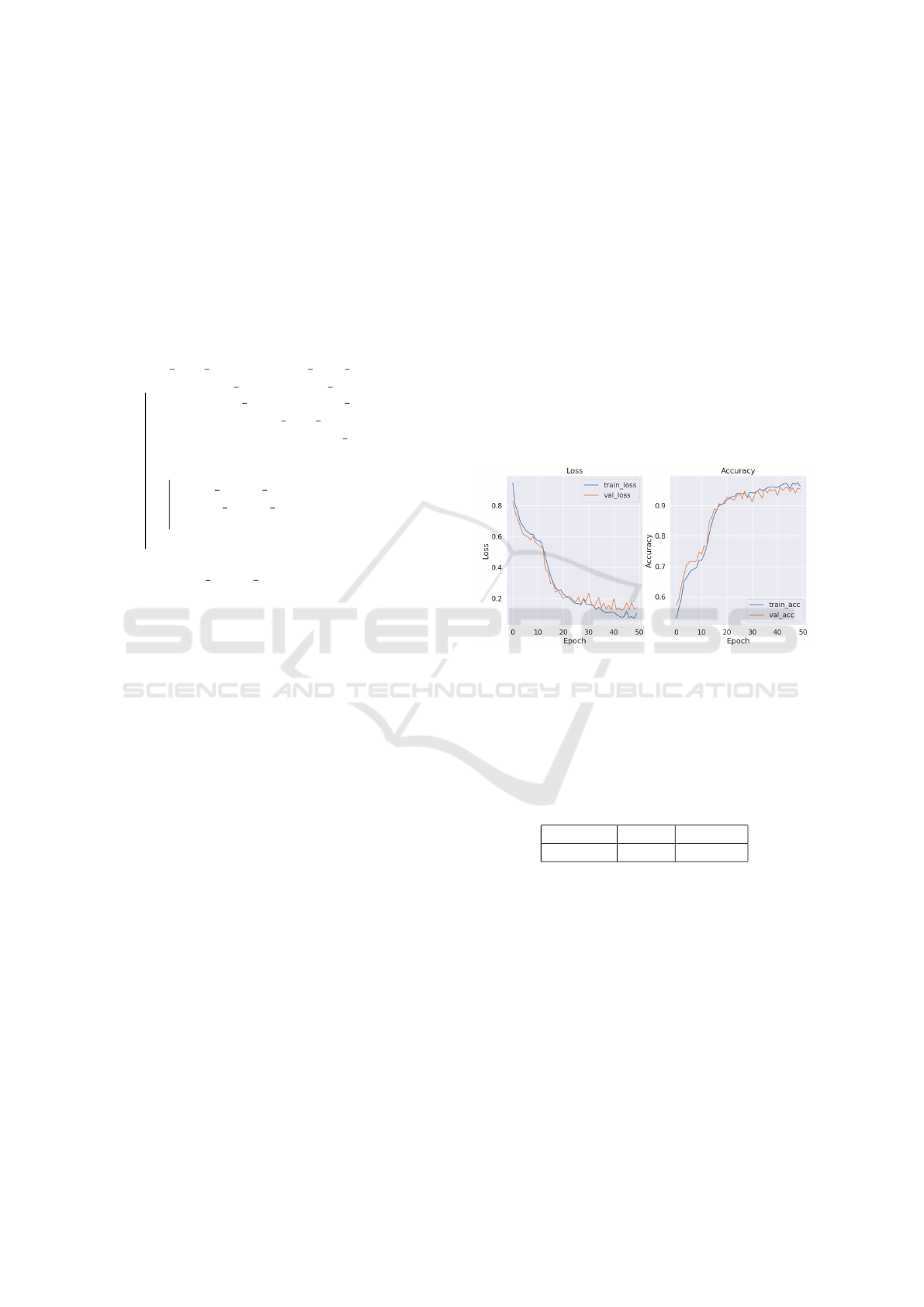
ory cells in each LSTM layer. The evolution of accu-
racy and loss function during training for the combi-
nation yielding the best results is depicted in Figure
3.
Figure 3: Evolution of the accuracy and the loss function
during training.
The evolution of accuracy and loss show that the
model did not over or under learn. The obtained re-
sults for the evaluation parameters are shown in table
1.
Table 1: Achieved parameters values for the evaluation of
the classification model based on Pothole Lab dataset.
Precision Recall F1-score
0.96 0.95 0.95
4.3 Federated Classification Model
Evaluation
To evaluate the performance of the federated learning
process, we conducted testing of the detection model
in two distinct phases. In the first phase, we utilized
the pre-trained model to assess the initial detection
capabilities across multiple devices. This allowed
us to gauge the baseline performance of the model
before any federated training. Following this initial
phase, we proceeded to the second phase, where the
detection model underwent federated training. Dur-
ing this process, data from multiple devices were ag-
Federated Road Surface Anomaly Detection Using Smartphone Accelerometer Data
381
gregated and used to refine the model’s parameters,
aiming to enhance its ability to generalize across di-
verse datasets while preserving user privacy. Subse-
quently, we conducted testing again to evaluate the
performance of the model after federated training. By
comparing the results of these two phases, we could
assess the effectiveness of the federated learning ap-
proach in improving the detection model’s accuracy
and robustness across different devices and datasets.
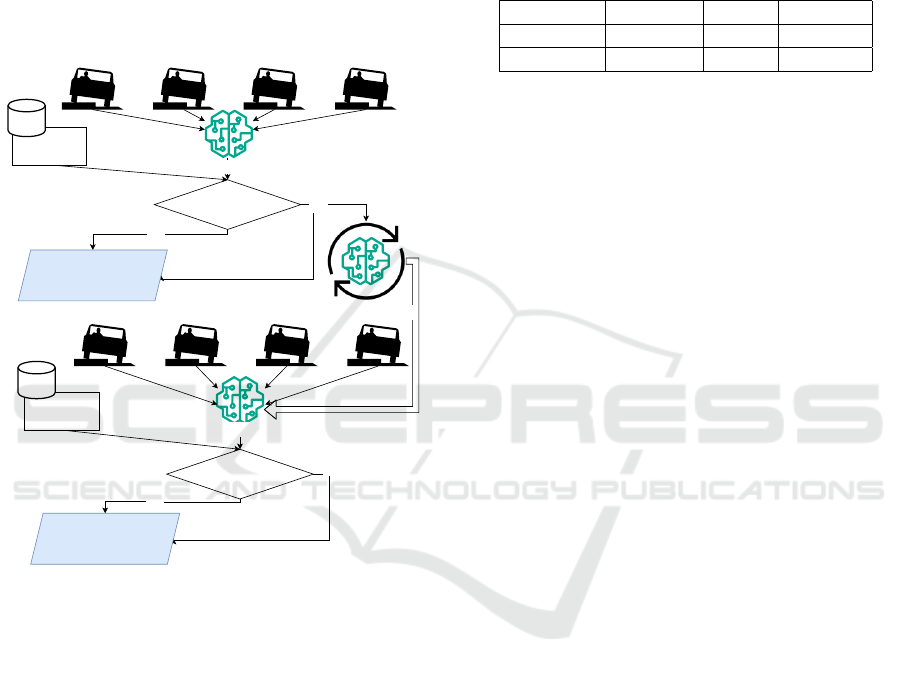
Figure 4 shows the followed process to achive the two
phases evaluation.
Classification result
Initial Model
Yes
NO
Correct classification
Registered road
anomalies
Federated training
Before Federated training
evaluation (first phase)
Classification result
Yes
NO
Correct classification
Registered road
anomalies
After Federated training
evaluation (Second phase)
Figure 4: Schema of the fusion process of Road surface
anomaly flags.
We deployed the detection model across four dif-
ferent devices to evaluate its performance in a real-
world setting. Each device was equipped with the
trained model and tasked with detecting road sur-
face anomalies during typical driving scenarios. The
anomaly database of the system was populated with
existing anomalies known to occur on the test road.
As the vehicles traversed various road conditions,
including smooth surfaces and areas with known
anomalies such as potholes and speed bumps, the
accelerometer sensors in the smartphones captured
data reflecting the vehicle’s acceleration along three
axes. This data was then processed by the detection
model to identify and classify road surface anomalies.
During detection, the system compared the detected
anomalies with those stored in the database. Any
discrepancies or inaccuracies in classification were
noted, and anomalies that were wrongly classified
were earmarked for further training of the model. Fol-
lowing the test, the results were analyzed to assess the
precision and recall of the detection model under real-
world conditions. The obtained results for the two
phases are detailed in table 2
Table 2: Achieved parameters values for the evaluation the
classification model before and after the federated training
(FT) process.
Phase Precision Recall F1-score
Before FT 0.77 0.73 0.73
After FT 0.84 0.79 0.79
5 DISCUSSION
The evaluation of our system comprised two dis-
tinct phases. Initially, we conducted an assessment
of the classification model’s performance before im-
plementing federated learning. This evaluation, con-
ducted solely on the trained dataset, yielded promis-
ing results, with a precision of 96% and recall of 95%.
These high scores indicate the reliability and effec-
tiveness of the model in accurately detecting and clas-
sifying road surface anomalies.
Subsequently, we proceeded with the evaluation
of the federated learning component. Upon deploy-
ment of the model across four different devices, an
initial test revealed a slight decline in performance,
resulting in a precision of 77% and recall of 73%.
This drop in performance can be attributed to varia-
tions in the data used for training and testing, high-
lighting the challenge of ensuring consistency across
diverse datasets.
To address this issue, we initiated a federated
training process, aggregating results from multiple
devices and relaunching the test. The subsequent
evaluation demonstrated a notable improvement in
performance, with a precision of 85% and recall of
79%. These enhanced results underscore the effec-
tiveness of the federated learning approach in refining
and optimizing the detection model.
Overall, the findings indicate that while the ini-
tial performance of the model was commendable, the
incorporation of federated learning significantly en-
hanced its performance, underscoring the importance
of collaborative and distributed learning methods in
improving the accuracy and robustness of detection
systems.
DATA 2024 - 13th International Conference on Data Science, Technology and Applications
382

6 CONCLUSION AND
PERSPECTIVES
This paper presents a proactive solution leveraging
smartphone technology for real-time detection and
notification of road surface anomalies. Through the
integration of machine learning techniques and ac-
celerometer data, our turn-by-turn navigation sys-
tem effectively identifies and alerts drivers to po-
tential road surface anomalies, thereby enhancing
overall road safety. The evaluation of our system
demonstrated promising results, with the classifica-
tion model exhibiting high precision and recall rates
in detecting anomalies. Furthermore, the implemen-
tation of federated learning proved instrumental in re-
fining the detection model’s performance across di-
verse situations, highlighting the efficacy of collabo-
rative learning approaches in improving detection ac-
curacy while preserving user privacy. Overall, our
system offers a practical and effective approach to ad-
dressing road safety concerns, with the potential to
significantly reduce the incidence of accidents and
improve the overall driving experience. As future
work, further optimization and refinement of the de-
tection model could be explored, along with the in-
tegration of additional sensors or data sources to en-
hance anomaly detection capabilities in various road
conditions. The most promising additional sensor is
the camera technology that can augment anomaly de-
tection capabilities. Cameras can capture visual in-
formation about road surface conditions, allowing for
the detection of anomalies before vehicles encounter
them.
DISCLOSURE OF AI TOOLS
USAGE
The preparation of this manuscript involved the use
of Copilote and ChatGPT to correct and improve the
language through the manuscript. Subsequently, the
authors reviewed and edited the content as necessary,
and take full responsibility for the paper’s content.
REFERENCES
Al-Sabaeei, A. M., Souliman, M. I., and Jagadeesh, A.
(2024). Smartphone applications for pavement condi-
tion monitoring: A review. Construction and Building
Materials, 410:134207.
Chen, C., Seo, H., and Zhao, Y. (2022). A novel pavement
transverse cracks detection model using wt-cnn and
stft-cnn for smartphone data analysis. International
Journal of Pavement Engineering, 23(12):4372–4384.
Dong, D. and Li, Z. (2021). Smartphone sensing of
road surface condition and defect detection. Sensors,
21(16).
Jan, M., Khattak, K. S., Khan, Z. H., Gulliver, T. A., and
Altamimi, A. B. (2023). Crowdsensing for road pave-
ment condition monitoring: Trends, limitations, and
opportunities. IEEE Access, 11:133143–133159.
Jeong, J.-H. and Jo, H. (2024). Toward real-world
implementation of deep learning for smartphone-
crowdsourced pavement condition assessment. IEEE
Internet of Things Journal, 11(4):6328–6337.
Kim, M. J. and Kim, Y. M. (2023). Rss model improvement
considering road conditions for the application of a
variable focus function camera. Sensors, 23(2).
Kosakowska, K. (2022). Evaluation of the impact of speed
bumps on the safety of residents-selected aspects.
Transportation research procedia, 60:418–423.
Lab, P. (2016). Roadway surface dis-
ruptions dataset, [online] available:
https://www.accelerometer.xyz/pothole lab/.
Lee, T., Chun, C., and Ryu, S.-K. (2021). Detection of road-
surface anomalies using a smartphone camera and ac-
celerometer. Sensors, 21(2).
Martinelli, A., Meocci, M., Dolfi, M., Branzi, V., Morosi,
S., Argenti, F., Berzi, L., and Consumi, T. (2022).
Road surface anomaly assessment using low-cost ac-
celerometers: A machine learning approach. Sensors,
22(10).
Mazari Abdessameud, O., Cherifi, W., Kribi, M. A. E. I.,
and Dahmani, A. (2022). Navisaf: A safe navigation
system for road anomalies detection. In IECON 2022–
48th Annual Conference of the IEEE Industrial Elec-
tronics Society, pages 1–6. IEEE.
Rahiman V, A. et al. (2021). Pothole detection and volume
estimation based on disparity transformation with his-
togram thresholding. Proceedings of the Yukthi 2021-
The International Conference on Emerging Trends in
Engineering.
Sholevar, N., Golroo, A., and Esfahani, S. R. (2022).
Machine learning techniques for pavement condition
evaluation. Automation in Construction, 136:104190.
Tao, D., Cheng, J., Yu, Z., Yue, K., and Wang, L. (2018).
Domain-weighted majority voting for crowdsourcing.
IEEE transactions on neural networks and learning
systems, 30(1):163–174.
Tomiło, P. (2023). Classification of the condition of
pavement with the use of machine learning meth-
ods. Transport and Telecommunication Journal,
24(2):158–166.
Xin, H., Ye, Y., Na, X., Hu, H., Wang, G., Wu, C., and
Hu, S. (2023). Sustainable road pothole detection: A
crowdsourcing based multi-sensors fusion approach.
Sustainability, 15(8).
Yuan, W., Yang, Q., and Zhang, R. (2023). Asphalt pave-
ment surface repair areas detection based on smart-
phone sensors. International Journal of Transporta-
tion Science and Technology.
Federated Road Surface Anomaly Detection Using Smartphone Accelerometer Data
383
