
Using NetLogo to Simulate Large Production Plants: Simulation
Performance: A Case Study
M. Umlauft
a
and M. Schranz
b
Lakeside Labs GmbH, Klagenfurt, Austria
Keywords:
Netlogo, Simulation Performance, Agent-Based Modeling, Flexible Job-Shop Scheduling.
Abstract:
NetLogo is a well-known agent-based modeling and simulation platform. While it is very popular in education,
it is still often perceived as having bad performance for large models, which is due to performance related
issues in early implementations. We show that over time, a quite large number of scientific papers have been
published using NetLogo and measure its performance on a common laptop a researcher or student might have
as a personal machine. We use a NetLogo model with about 2500 lines of code and up to 10000 agents to
perform our measurements and show that even with such an underpowered machine, with current versions of
NetLogo it is quite possible to run simulations of larger models in reasonable simulation time.
1 INTRODUCTION
The agent-based simulation platform Net-
Logo (Wilensky, 1999) is one of the most widely used
tools for the simulation of self-organized systems.
It is open source with a good documentation and
regular updates with on average two versions per
year since 2002
1
. The mature code base is actively
maintained, offers many extensions including a
Python interface and comes with a vast collection of
models in a library. NetLogo is well known for its
usage in education, but also got popular as a research
tool for agent-based modeling and complex systems
especially because of its ease of use that made it a
low-entry tool for researchers who “are not profes-
sional programmers” (Tisue and Wilensky, 2004)
– this was one of the explicitly stated goals of the
NetLogo developers. While highly accessible, older
versions had performance problems for large models,
which often required re-implementation in more
high-performing computer languages (eg. C++). In
the last decade, though, performance has been greatly
improved; in 2017 and 2019 respectively, (Railsback
et al., 2017; Railsback and Grimm, 2019) showed
that newer versions of NetLogo have the ability to
a
https://orcid.org/0000-0002-0118-2817
b
https://orcid.org/0000-0002-0714-6569
1
The versions of NetLogo: https://ccl.northwestern.
edu/netlogo/oldversions.shtml
perform simulations of several thousand agents in
large spaces within feasible computation time.
Execution speed, sophisticated and highly opti-
mized algorithms and having most of the code com-
piled instead of interpreted in current versions, makes
the platform now feasible to execute thousands of
model runs (Railsback et al., 2017). The increased us-
age of NetLogo as the simulation platform of choice
for agent-based simulation is reflected in the number
of research papers which exceed 3,000 in the last 10
years
2
.
The results of Railsback et al. (Railsback et al.,
2017) motivated us to the test the performance of
current versions of NetLogo using our implemented
framework SwarmFabSim (Umlauft et al., 2022) as a
test case. SwarmFabSim is designed for simulations
of bottom-up swarm intelligence algorithms in large
production plant environments. The original use-case
of SwarmFabSim is the simulation of a Semiconduc-
tor production plant, based on the requirements of
a leading semiconductor manufacturer, namely, Infi-
neon Technologies
3
. In particular, we consider the so-
called front end of line processing where the wafers
are processed to create ICs. Typical process steps
include lithography, doping, oxidation, etching, and
measuring (Geng, 2018). There are between 400 and
1200 different stations that need to be scheduled in
such a production plant (fab). They typically produce
2
https://ccl.northwestern.edu/netlogo/references.shtml
3
https://www.infineon.com
Umlauft, M. and Schranz, M.
Using NetLogo to Simulate Large Production Plants: Simulation Performance: A Case Study.
DOI: 10.5220/0012768800003758
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2024), pages 297-304
ISBN: 978-989-758-708-5; ISSN: 2184-2841
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
297

more than 1500 different products in around 300 dif-
ferent process steps.
Our paper does not focus on general techniques
of speeding up simulation time, such as using parallel
runs, instead, we showcase the performance of cur-
rent Netlogo implementations by using the example
of a large framework simulating Semiconductor fabs.
We measure the simulation runtime without visual-
izations for several large models comprising of about
2500 lines of code, using a conceptual, but realisti-
cally sized fab scenario. The simulations are run on a
typical laptop a researcher or student might have ac-
cess to. The paper is organized as follows:
• Related work is shown in Section 2.
• We then describe why we deem Netlogo a suit-
able platform for our ABM simulation and de-
scribe our framework, the architecture, the used
algorithm and log file output for our performance
test.
• We then show our test setup and the performance
analysis of simulation time on a common laptop
in Section 4.
• The paper is concluded in Section 5.
2 RELATED WORK
In research and in industry, there exist typical tools
for discrete event process flow simulation of a fab
specific to the application type. The semiconductor
industry uses, e.g., AutoMod / AutoSched AP
4
or D-
Simlab/D-Simcon
5
. The level of detail to simulate
flexible job-shop scheduling is very high, and they
do not support ABM. Beside semiconductor-specific
simulation tools, there exist tools developed not for a
certain application domain. A ranked list of discrete
simulation software platforms for commercial use can
be found in Dias et al. (Dias et al., 2016).
Employing Agent-Based Modeling (ABM) for
swarm algorithms is more suitable than utilizing sys-
tem dynamics simulation (stock and flow) or contin-
uous simulation using differential equations (Umlauft
et al., 2022). In ABM, a swarm is composed of in-
dividual members that can be represented as agents.
These agents follow local rules, interact with other
agents and their environment. There is a set of spe-
cific guidelines given by Wilensky and Rand, when
to use ABM. The reader is referred to their publica-
tion in (Wilensky and Rand, 2015) as this topic is
out of the scope of this paper. Numerous authors
4
https://automod.de/autosched-ap/
5
http://www.d-simlab.com/
have already demonstrated the conceptual application
of ABM to job-shop production simulation. For in-
stance (Zhang et al., 2019) illustrate this concept in
their work. Furthermore, specific implementations
utilizing multi-agent systems in manufacturing sys-
tems have been explored, as exemplified in the study
of (Shukla, 2018).
For ABM simulation many tools and platforms
exist for the simulation of the job-shop scheduling
problem. A comprehensive overview is given in e.g.,
CoMSES Net / OpenABM
6
and (Abar et al., 2017)
for various application domains. We selected a list of
most commonly used ABM simulation tools:
Anylogic is a commercially available platform that
supports various modeling modes including sys-
tem dynamics, process-centric discrete event
modeling, and ABM. Besides manufacturing,
other industries like supply chain, transportation
and logistics have it commonly in use
7
.
MARS is a C# framework and stands for Multi-
Agent Research and Simulation. Developed as
an academic project at the Department of Com-
puter Science at Hamburg University of Applied
Sciences in Germany at
8
MARS provides tools
for multi-agent research and simulation.
Mason is a collaboration between George Mason
University (USA) and Università degli Studi di
Salerno (Italy). It serves as an ABM simulation
core developed in Java, providing a framework for
creating custom simulations. Mason includes sup-
port for both, 2D and 3D visualization tools. As
of the time of writing this paper, it continuous to
receive active support and development
9
.
Mesa is a is an open-source modular framework for
ABM simulation developed in Python. Its pri-
mary objective is to serve as a Python 3-based
alternative to NetLogo, Repast, or Mason. The
Python-based architecture enables seamless inte-
gration with the corresponding data analysis tools.
Mesa has been under development since 2015,
and as of the time of writing this paper, contin-
uous to receive active support
10
.
Repast is a family of three distinct open source ABM
toolkits built on Java, C++, and Python. With over
15 years of development, these toolkits offer ro-
bust capabilities for ABM simulation
11
.
6
https://www.comses.net/resources/
modeling-frameworks/
7
https://www.anylogic.com/
8
https://www.mars-group.org/
9
https://cs.gmu.edu/~eclab/projects/mason/
10
https://mesa.readthedocs.io/en/latest/
11
https://repast.github.io/
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
298

In this publication we decided to use Net-
Logo (Wilensky, 1999) for ABM simulation, an open-
source tool based on the language Logo. As already
mentioned in the introduction of this paper, the code
base has been consistently maintained for more than
20 years, the platform is well documented and offers
many extensions to other libraries and tools that were
extensively tested.
In the literature we can find several examples
where researchers used NetLogo for production pro-
cesses. One example is shown in (Gwiazda et al.,
2020) where the authors implement a multiple ant
colony approach that solves the job shop problem.
The authors in (Habib Zahmani and Atmani, 2021)
offer a specialized framework, demonstrating the cre-
ation of a NetLogo simulation tailored for job shop
problems with predefined job and machine values. In
addressing the algorithmic aspect, they employ a ge-
netic algorithm to uncover optimal allocations of dis-
patching rules. The connection of ABM in NetLogo
with Matlab was performed in (Alves et al., 2018)to
exchange scheduling solutions. Their hybrid algorith-
mic approach addresses the job shop scheduling prob-
lem by combining optimization techniques with dy-
namically negotiating agents.
Specifically concerning the performance of Net-
Logo, the literature lacks comprehensive tests and
simulation runs to conduct evaluations in this re-
gard. The research conducted by Railsback et al.
(Railsback et al., 2017; Railsback and Grimm, 2019)
demonstrated that newer versions of NetLogo pos-
sess the capability to performs simulations involv-
ing several thousand agents within large spaces, all
within reasonable computation times. Additionally to
that, (Railsback et al., 2017) offers strategies to op-
timize the coding strategy in NetLogo, e.g., how to
enhance the efficiency of agent filtering statements
by utilizing global agentsets, and how to use the Be-
haviorSpace for experiments to achieve an improved
performance in simulation experiments. Beside the
most cited work of (Railsback et al., 2017), in (An-
telmi et al., 2022) NetLogo exceeds the expectations
in all evaluated models (incl. Flocking and Forest-
Fire), demonstrating strong efficiency and scalability.
According to their results and discussion, NetLogo
achieves moderate to low execution times and effec-
tively manages intensive workloads, despite not be-
ing explicitly designed for simulating complex mod-
els. The study compares NetLogo with several ABM
simulation tools including Repast and MASON.
3 SIMULATING WITH NetLogo
NetLogo (Wilensky, 1999) is a free simulation and
modeling platform for agent-based simulation main-
tained by Northwestern University, Chicago. It is well
documented, actively maintained with a mature code
base, and offers many extensions. It supports mo-
bile agents, an environment consisting of intelligent
patches (basically stationary agents), links to connect
agents, and communications between agents and/or
patches. It offers an interactive user interface which
makes it easy to rapidly prototype and visualize agent-
based models.
NetLogo is a time-based simulator using a discrete
scale of time ticks. Simulation is typically started
with a procedure traditionally called “setup”, which
is run once at the beginning to initialize the simu-
lation. The main simulation loop is implemented in
a procedure traditionally called “go” which is then
called once per tick. From there, all other procedures
are then called to perform the necessary computations
to simulate the model. Therefore, simulation perfor-
mance is dominated by the code in “go” and all pro-
cedures called by it. Since NetLogo is a time-based
simulator, unlike in event-based simulation, ticks –
and therefore the “go” procedure – are also executed
if there is no actual change in simulation status, eg. if
agents just wait and “do nothing” for a certain number
of ticks.
To investigate a model, at least a subset of its
parameter-space needs to be simulated, and since
swarm intelligence algorithms are typically stochas-
tic, the researcher has to perform multiple replications
for each chosen input parameter combination. To fa-
cilitate this type of mass simulation, NetLogo offers a
tool called “BehaviorSpace” which lets the researcher
configure the parameters and the number of desired
replications in an easy fashion. The results are written
into log files which can later be statistically evaluated
with other tools, like R or Excel. Depending on the
setup, one or multiple lines can be written into a log
file at every time tick or at the end of every simulation
run. Logging method and writing speed greatly influ-
ences simulation performance; logging several lines
per tick onto a traditional magnetic harddrive is much
more time-costly than logging one line per simulation
run onto an SSD (solid-state-drive).
Also, computational effort can easily explode
when many different parameter combinations are to
be evaluated; in general, if you want to simulate an ex-
periment with x parameters of y different values each
at r replications, you need to perform n = r ∗ x
y
simu-
lation runs.
Using NetLogo to Simulate Large Production Plants: Simulation Performance: A Case Study
299

NetLogo BehaviorSpace supports the use of mul-
tiple CPUs and CPU cores to parallelize simulation
runs (one run per core), so large multiprocessor ma-
chines can be used to tackle mass simulations. In
cases where the number of runs would still be too
large, NetLogo also supports finding the interesting
sections of the parameter space with a tool called “Be-
haviorSearch”, which searches the parameter space
with genetic algorithms (Wilensky and Rand, 2015).
3.1 SwarmFabSim: A Framework
Created in NetLogo
SwarmFabSim is a simulation framework imple-
mented in NetLogo (compatible with versions 6.1 and
up) intended to simulate the fabrication of products
in a large factory. In particular, SwarmFabSim is
intended to simulate bottom-up swarm intelligence
algorithms optimizing front-end-of-line (FEOL) pro-
duction of semiconductors, but the implementation is
abstract enough to be applied to other production fa-
cilities using the job-shop principle as well.
SwarmFabSim supports an arbitrary number of
machines M
m
i
of machine type m which can per-
form process P
m
and lots l
t
n
of product type t to
be produced. The product type t is defined by a
recipe R
t
which contains all necessary process steps
P
m
,P
n
,P
o
,... to produce a lot of this type in or-
der. Machines and lots are modelled as agents; the
number of which are only limited by the available
memory and CPU power of the simulation server.
The framework supports running the machines either
in dispatching or scheduling mode. In dispatching
mode, all machines of type m in a workcenter W
m
=
{M
m
i
,M
m
j
,. ..} share a common queue Q
m
while in
scheduling mode each machine M
m
i
has its own queue
Q
m
i
.
Currently, we support two classes of machines -
single lot oriented machines, which process one lot
after the other and batch machines, which (can) pro-
cess several lots of the same product type t at once. Of
each class of machine, there can be several different
machine types m; iow. there can be several differ-
ent types of single step and several different types of
batch machines to model all the different types of ma-
chines in a fab – each with their own parameters, like
processing time, or batch size. A further important
constraint for batch machines is that batch machines
will wait for a time W T for a batch in the queue to fill
up. E.g., if a batch machine M
m
i
has a batch size of
4, and there is already a lot l
t
0
in its queue Q
m
, it will
wait for more lots l
t
1
...l
t
3
of product type t to arrive
to fill the batch. If the machine is idle, it will either
wait until enough lots have arrived in the queue for the
batch to be filled completely or for the waiting timer
W T to expire. At which point it will immediately start
processing, even if the batch is not completely filled.
The fab and load configuration, such as the num-
ber of machines and their parameters and the number
of lots and their recipes are specified in config files.
SwarmFabSim comes with several swarm intelligence
algorithms and the framework architecture (for details
see Section 3.2) supports easy extension with addi-
tional algorithms. All machines in the simulation will
use the same algorithm and scheduling mode during
one simulation run.
Figure 1: The SwarmFabSim User Interface.
Typically, SwarmFabSim will be used in “head-
less mode” (without live visualisation) via Behav-
iorSpace (see Section 3 above), but it can be started
in interactive mode from the user interface shown in
Figure 1 for demonstration purposes and prototyping
/ debugging.
The source code of SwarmFabSim is available as
open-source from our GitHub repository
12
.
3.2 Architecture
Figure 2 shows the architecture of the Swarm-
FabSim framework. The main software entry
point and user interface are contained in the file
SwarmFabSimulation.nlogo. This file contains the
setup procedure that initializes the simulation and
the go procedure that contains the main simulation
loop and is run once per tick.
The setup procedure calls other procedures to
read and parse the config files, set up the parame-
12
https://swarmfabsim.github.io
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
300
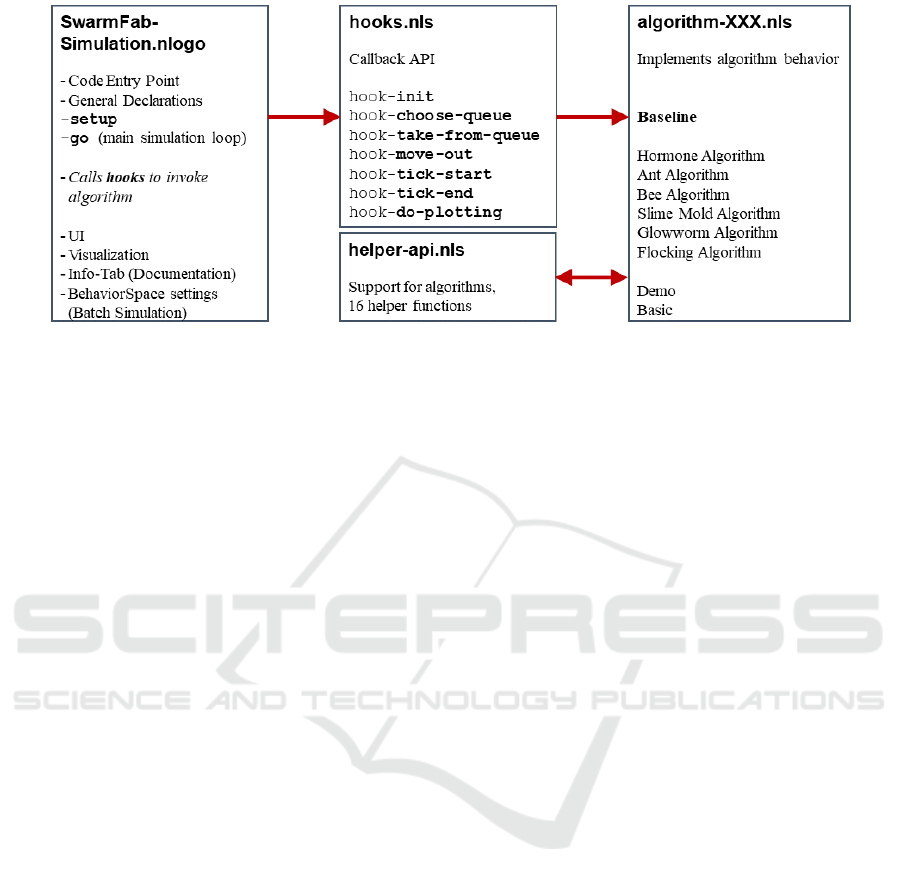
Figure 2: Simulation Framework Architecture.
ters of the simulation, and initializes the swarm in-
telligence algorithm via the init callback of the
API (application programming interface) contained in
hooks.nls. This action is only performed once at the
beginning of a simulation run.
The go procedure calls the selected swarm intel-
ligence algorithm via the other API functions, using
the callback pattern. For each tick, the go procedure
will
• first call the tick-start callback. With this pro-
cedure, the algorithm can do regular, time-based
updates, like, e.g., propagate hormone values or
decrease pheromone values.
• Then, any “free” lots – that is any lots not cur-
rently assigned to a queue or being processed in a
machine – will be moved to an appropriate queue.
In case of the dispatching strategy, where all ma-
chines of the same type share a queue, the lot is
simply moved to the shared queue of the work-
center of machines of the type implied by the next
step in the lot’s recipe. In case of scheduling,
where every machine has its own, separate queue,
this decision is taken by the swarm intelligence
algorithm. Therefore, the go procedure will call
the choose-queue hook which will in turn call
the choose-queue procedure of the swarm intel-
ligence algorithm.
• Any idle machines are then called via the take-
from-queue hook which will in turn call the al-
gorithm to make the decision which lot(s) to take
from the queue
• before all non-empty machines are then called to
process their respective lot(s) for one tick. For any
lot(s) that get finished during this tick, the move-
out hook will be called. In this procedure, the
algorithm can take actions like, e.g., updating a
pheromone value. At this point, the lot becomes
“free” again.
• Next, the tick-end callback will be invoked. Like
with tick-start, the algorithm can do regular,
time-based updates. Typically, algorithms use
only either the tick-start or the tick-end call-
back.
• Global queue length statistics will be updated
next via the calculate-queue-length-stats
procedure and
• finally, visualization updates will be plotted if vi-
sualization is enabled (typically only in interactive
mode).
3.3 The Baseline Algorithm
SwarmFabSim provides this algorithm as a base-
line for performance comparisons. Baseline is a
memoryless/stateless algorithm that uses only the
choose-queue and the take-from-queue callbacks.
In general, the Baseline algorithm works differently
depending on the class of machine – single lot ori-
ented or batch:
choose-queue on single lot oriented machines
shortest queue.
choose-queue on batch machines the objective is to
quickly fill any existing semi-filled batch in a
queue. Therefore, it will assign a lot of type
t to the queue with the least amount of lots of
this type missing to fill a batch of type t. If the
respective machine is currently idle and waiting
for the WT timer to expire, it will start immedi-
ately when the batch is filled. If the machine is
currently processing, this approach increases the
chance of this batch being filled by the time the
machine becomes idle. Even if the batch is never
Using NetLogo to Simulate Large Production Plants: Simulation Performance: A Case Study
301

completely filled and the machine has to wait for
the W T timeout to expire, it will still run at a
higher percentage of fill. If there are no semi-
filled batches of the current lot type, Baseline
chooses the queue with the least overall length (re-
gardless of lot type) to start the new batch.
take-from-queue on single lot oriented machines
FIFO.
take-from-queue on batch machines if there is a
full batch of a type t (or fills up during the W T
timeout), this batch is taken. If there are several
full batches in the queue, one is chosen at random.
3.4 Log File Output
When SwarmFabSim is run from BehaviorSpace, it
produces four different types of result log files, which
are all in a plain text, comma-separated value format:
*-table.csv this is the standard Netlogo log file. It
logs a line for every tick; in our configuration it
writes the following values: the run number, the
chosen swarm algorithm, the chosen allocation
strategy, whether a config file was used and its file
name, whether debugging and visualization mode
were turned on, the tick number, and the average,
max, and min queue length in the system at this
tick. As this file logs one line for each tick, its
influence on simulation performance can be no-
ticeable, especially if the medium on which the
log files reside is slow.
*-lmvs.csv this is a custom log file that tracks lot
movements between machines in detail and logs
a line for every tick and lot movement. It logs the
run number, the current tick, the mode of move-
ment (lot got put into a queue, moved into a ma-
chine, moved out from a a machine), the lot type,
the unique lot number, the position of the recipe
pointer (how far advanced along the recipe the lot
is), the machine type, the unique machine id and
a slot number in case of a batch machine. Due to
the high level of detail in this log file it can be-
come quite large. Since it logs a line for every
lot movement that occurred at every tick, so po-
tentially many lines for each tick, writing this log
file has the biggest influence on simulation perfor-
mance.
*-kpi.csv this is a custom log file that is written once
at the end of every simulation run. It logs the
run number, the average flow factor, tardiness, and
machine utilization, plus the total makespan (the
simulation duration in ticks). Since this file logs
only one line at the end of each simulation run, its
influence on simulation performance is low.
*-lots.csv this is a custom log file that is written once
per run and lot at the end of every simulation run.
It logs the run number, the lot type, the unique
lot number, the total queuing time, raw processing
time, and total processing time for the lot, plus the
overall flow factor and tardiness for this lot. While
this file is written only once at the end of the sim-
ulation run, it can potentially become quite big if
the number of lots is very large. Since this file is
only logged to once at the end of each simulation
run, its influence on simulation performance is not
very large despite the potentially large file size.
Since the *-table.csv and *-lmvs.csv log files have
the most impact on simulation performance, simu-
lations should be performed on machines with fast
drives to store these files so as not to slow down sim-
ulation unnecessarily. A lot of performance can also
be gained by not logging to files whose information
you are not going to analyze; eg. if you do not need
the detailed lot movement information in *-lmvs.csv,
disabling this log file will speed up simulation.
4 EVALUATION
Our paper does not focus on general techniques of
speeding up simulations, such as turning off visual-
ization, using a large multi-processor server with a
fast SSD disk, sampling the parameter space before
starting detailed simulations, or making sure that no
unnecessary calculations are repeatedly performed in
the “go” procedure. Instead, we showcase the per-
formance of current Netlogo implementations by us-
ing the example of our implemented SwarmFabSim
framework, using typical models and one of our al-
gorithms. We measure the runtime of one run with-
out visualizations for several typical large models on
a typical laptop a researcher would have access to.
4.1 Scenario Configuration
We designed our test scenario inspired by both, the
aforementioned real-world data of between 400 and
1200 different stations in a fab which produces prod-
ucts in around 300 different process steps and on the
SMT2020 testbed (Kopp et al., 2020). The SMT2020
datasets contain up to 105 workcenters (machine
types) and recipes for up to 10 products that are be-
tween 242 and 583 steps in length.
Our test scenario uses a fab of 100 workcen-
ters (machine types) of between 4 and 12 machines
each and 10 product types that have recipes of 250
to 350 steps in length. We then load this fab with
100, 1000, 5000, and 10K lots (divided among the
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
302

10 product types). Monthly production is often a
keenly guarded secret of a fab; the best overview of
production across semiconductor fabs to our knowl-
edge is given in (Wikipedia, 2024), where most fabs
listed have monthly production capacities of less than
100000 wafers, which – using the industry standard
of 25 wafers per lot – amounts to 4000 lots.
For each lot type, we generate an average of 1/10
of the total lot number ±10% each; iow. for the sce-
nario with 100 lots in total, each of the 10 lot types
will have between 9 and 11 lots, for the scenario with
1000 lots in total, each lot type will have between 90
and 110 lots, etc.
We use the parameters shown in Table 1 to create
the machines for the fab. N(µ,σ
2
) for the raw process
time denotes a Normal Distribution from which neg-
ative values have been capped as process time cannot
be negative. U(a,b) for the batch sizes denotes a uni-
form distribution.
Table 1: Parameters used to create the machines.
Machine Parameter Value
Raw process time (RPT) N(µ ,σ
2
) with µ =
1.16, σ
2
= 0.32
Probability batch machine 50%
Batch size batch machines U(2,8)
Waiting time batch machines 15%(RPT )
4.2 Results
We intentionally used a common laptop that might be
available to any researcher for our measurements to
show that, despite the common perception that Net-
Logo is supposedly too slow to do larger simulatin
studies, current versions of NetLogo work well even
on weaker hardware. This type of setup might be used
by a single scientist or student to do quite large studies
on their own, personal machine, without immediately
requiring the use of an institute’s simulation server (to
which access might be limited).
We tested using NetLogo in headless mode the
reset-timer and timer commands on an ASUS
UX305LA Laptop from 2016, running Windows 10
with an Intel CORE i7 CPU with 4 cores, running at
2.4 GHz, 8 GB of RAM, and an SSD harddrive. We
used only one of the available cores; the results are
averaged over 3 runs each.
We compare the performance for the following
major releases of Netlogo: 6.2.0 from December
2020, 6.3.0 from September 2022, and 6.4.0 from
November 2023 as shown in Table 2.
As can be seen, there is a is an increase in simula-
tion time of almost 20% from version 6.2.0 to version
Table 2: Simulation Performance in seconds, over NetLogo
versions and number of lots.
Netlogo Version 6.2.0 6.3.0 6.4.0
Number of lots
100 51 61 60
1000 122 144 142
5000 690 816 782
6.3.0. Analysis of the release notes of these respec-
tive NetLogo versions reveals that in version 6.3.0 the
bundled version of Java was upgraded from version 8
to version 17, which is the current long-term-support
release of the Java runtime. As no other changes
that would cause such a large loss in performance
are listed in the release notes (eg. no large changes
to the architecture or core language), the authors as-
sume that the measured performance loss is due to
the upgrade of the Java version. Experimenters who
do not need the new features of versions 6.3.0 and
6.4.0 (see release notes
13
whose simulations are very
large and time-intensive might want to consider stay-
ing with version 6.2.0 instead.
We also tested a very large scenario with 10000
lots (equivalent to 250000 wafers) on NetLogo ver-
sion 6.4.0 which finished on average in 2101 seconds;
iow. a good half of an hour. Tests with logging turned
off (apart from recording the runtime at the end of
each run) for the 1000 lot scenario on NetLogo ver-
sion 6.2.0 finished on average in 95 seconds versus
122 seconds with full logging, giving a speedup of
22% on an SSD drive.
5 CONCLUSION
While NetLogo is popular in education and has
gained popularity as a simulation tool in research, it is
still often conceived as not well performing for large
models. This is due to performance related issues in
early implementations. We measured simulation per-
formance of a quite large NetLogo model on a com-
mon laptop a researcher or student might have as a
personal machine and show that even with such an
underpowered machine, with current versions of Net-
Logo it is quite possible to run simulations of larger
models in reasonable simulation time. Our measure-
ments did show an approximately 20% increase in
simulation time from version 6.2.0 to version 6.3.0
and beyond which is probably due to the upgrade of
the underlying Java distribution from version 8 to ver-
sion 17 mentioned in the NetLogo release notes. For
13
http://ccl.northwestern.edu/netlogo/docs/versions.
html
Using NetLogo to Simulate Large Production Plants: Simulation Performance: A Case Study
303

time-intensive simulations which do not require the
newly introduced features of or depend on any bug-
fixes in NetLogo version 6.3.0 and up, staying with
version 6.2.0 might be worth considering.
ACKNOWLEDGEMENT
This work was performed in the course of project
SwarmIn supported by FFG under contract number
894072.
REFERENCES
Abar, S., Theodoropoulos, G. K., Lemarinier, P., and
O’Hare, G. M. (2017). Agent based modelling and
simulation tools: A review of the state-of-art software.
Computer Science Review, 24:13–33.
Alves, F., Varela, M. L. R., Rocha, A. M. A., Pereira, A. I.,
Barbosa, J., and Leitão, P. (2018). Hybrid system
for simultaneous job shop scheduling and layout opti-
mization based on multi-agents and genetic algorithm.
In International Conference on Hybrid Intelligent Sys-
tems, pages 387–397. Springer.
Antelmi, A., Cordasco, G., D’Ambrosio, G., De Vinco,
D., and Spagnuolo, C. (2022). Experimenting with
agent-based model simulation tools. Applied Sciences,
13(1):13.
Dias, L. M., Vieira, A. A., Pereira, G. A., and Oliveira,
J. A. (2016). Discrete simulation software ranking—a
top list of the worldwide most popular and used tools.
In 2016 Winter Simulation Conference, pages 1060–
1071. IEEE.
Geng, H., editor (2018). Semiconductor Manufacturing
Handbook. McGraw-Hill Education.
Gwiazda, A., Bana
´
s, W., S˛ekala, A., Topolska, S., and
Hryniewicz, P. (2020). Modelling of production pro-
cess using multiple ant colony approach. Interna-
tional Journal of Modern Manufacturing Technolo-
gies, XII(1):201–213.
Habib Zahmani, M. and Atmani, B. (2021). Multiple dis-
patching rules allocation in real time using data min-
ing, genetic algorithms, and simulation. Journal of
Scheduling, 24(2):175–196.
Kopp, D., Hassoun, M., Kalir, A., and Mönch, L. (2020).
SMT2020 – A semiconductor manufacturing testbed.
IEEE Transactions on Semiconductor Manufacturing,
33(4):522–531.
Railsback, S., Ayllón, D., Berger, U., Grimm, V., Lytinen,
S., Sheppard, C., and Thiele, J. C. (2017). Improving
execution speed of models implemented in netlogo.
Journal of Artificial Societies and Social Simulation
(JASSS).
Railsback, S. F. and Grimm, V. (2019). Agent-based and
individual-based modeling: a practical introduction.
Princeton university press, "2nd" edition.
Shukla, O. J. (2018). Agent Based Production Scheduling
in Job Shop Manufacturing System. . . . PhD thesis,
MNIT Jaipur.
Tisue, S. and Wilensky, U. (2004). Netlogo: Design and
implementation of a multi-agent modeling environ-
ment. In Proceedings of the Agent 2004 Confer-
ence on Social Dynamics: Interaction, Reflexivity and
Emergence, volume 2004, pages 7–9, Chicago, IL.
Umlauft, M., Schranz, M., and Elmenreich, W. (2022).
Simulation of swarm intelligence for flexible job-shop
scheduling with swarmfabsim: Case studies with arti-
ficial hormones and an ant algorithm. In International
Conference on Simulation and Modeling Methodolo-
gies, Technologies and Applications, pages 133–155.
Springer.
Wikipedia (2024). List of semiconductor fabrica-
tion plants. https://en.wikipedia.org/wiki/List_of_
semiconductor_fabrication_plants. last visited:
March 1st, 2024.
Wilensky, U. (1999). Netlogo. http://ccl.northwestern.edu/
netlogo/.
Wilensky, U. and Rand, W. (2015). An Introduction to
Agent-Based Modeling: Modeling Natural, Social,
and Engineered Complex Systems with NetLogo. MIT
Press.
Zhang, T., Xie, S., and Rose, O. (2019). Agent-based sim-
ulation of job shop production. Simul. Notes Eur.,
29(3):141–148.
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
304
