
Enhancing Holonic Architecture with Natural Language Processing for
System of Systems
Muhammad Ashfaq
1 a
, Ahmed R. Sadik
2 b
, Tommi Mikkonen
1 c
,
Muhammad Waseem
1 d
and Niko M
¨
akitalo
1 e
1
University of Jyv
¨
askyl
¨
a, Jyv
¨
askyl
¨
a, Finland
2
Honda Research Institute Europe, Germany
fi
Keywords:
System of Systems, Holon Communication, Holonic Architecture, Natural Language Processing,
Conversational Generative Intelligence, Interoperability, Human-System Interaction.
Abstract:
The ever-growing complexity and dynamic nature of modern System of Systems (SoS) necessitate efficient
communication mechanisms to ensure interoperability and collaborative functioning among constituent sys-
tems (CS), referred to as holons in the holonic architecture of SoS. This paper proposes a novel approach to
enhance humand-to-holon and holon-to-holon communication within the holonic architecture through the in-
tegration of Natural Language Processing (NLP) techniques. Our proposed framework utilizes advancements
in NLP, specifically Large Language Models (LLMs), enabling holons to understand and act on natural lan-
guage instructions. This enables more intuitive holon-to-holon and human-to-holon interactions, leading to
better coordination among diverse systems. The framework’s practical application is demonstrated through an
Unmanned Vehicle Fleet (UVF) case study, showcasing its potential in enhancing communication and coordi-
nation in complex SoS. Additionally, we propose evaluation strategies to assess the efficiency and effectiveness
of this framework, and identify areas for improvement. This work sets the stage for future exploration and pro-
totype implementation, paving the way for further advancements in SoS communication and collaboration.
1 INTRODUCTION
A System of System (SoS) is a collection of sys-
tems functioning together to achieve a common
goal (Nielsen et al., 2015). These SoSs are comprised
of multiple Constituent Systems (CS), each func-
tioning independently with its management structure.
CSs within an SoS can be geographically dispersed,
further highlighting the need for effective communi-
cation and coordination. When integrated, the overall
SoS capabilities are far more than that of the individ-
ual CSs forming the SoS. Moreover, an SoS should
support evolutionary development allowing CSs to
join or leave the SoS at runtime to meet the desired
needs. SoS finds numerous applications in real-life
domains, including energy grids, air traffic manage-
ment, defense, and robotics swarms (Jamshidi, 2008).
a
https://orcid.org/0000-0003-1870-7680
b
https://orcid.org/0000-0001-8291-2211
c
https://orcid.org/0000-0002-8540-9918
d
https://orcid.org/0000-0001-7488-2577
e
https://orcid.org/0000-0002-7994-3700
Managing the complexity of SoS is a major chal-
lenge. Traditional approaches often struggle due
to the inherent autonomy and heterogeneous na-
ture of CSs. Holonic architectures (Blair et al.,
2015) offer a promising solution by decomposing
the SoS into smaller, self-governing entities called
holons (Koestler, 1968). This duality facilitates a re-
cursive system architecture, allowing for self-reliance
alongside cooperation with other holons forming
a holarchy—a hierarchy of holons operating au-
tonomously yet in coordination to achieve common
objectives. The holonic approach aligns with key SoS
architectural principles, such as interoperability, scal-
ability, and adaptability. These principles motivate
researchers to represent the CS of SoS as ‘holons’.
This representation enables functionalities such as CS
discovery and dynamic SoS composition (Elhabbash
et al., 2024).
While the holonic architecture offers a promising
approach for SoS engineering, it can face substan-
tial interoperability challenges. The heterogeneous
CSs, or holons, often adhere to distinct data for-
mats, communication protocols, and interaction pat-
Ashfaq, M., Sadik, A., Mikkonen, T., Waseem, M. and Mäkitalo, N.
Enhancing Holonic Architecture with Natural Language Processing for System of Systems.
DOI: 10.5220/0012787300003753
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Conference on Software Technologies (ICSOFT 2024), pages 427-433
ISBN: 978-989-758-706-1; ISSN: 2184-2833
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
427

terns. This diversity creates interoperability hurdles,
hindering seamless information sharing, command in-
terpretation, and task collaboration requiring special-
ized knowledge for SoS understanding and imple-
mentation. Moreover, the dynamic nature of SoS,
where CSs can join or leave, necessitates adaptive
and flexible communication mechanisms to handle
evolving SoS compositions. Finally, while in oper-
ation, SoS should have the capability to interact with
humans, necessitating communication to expand to-
wards a form that is immediately understood by hu-
mans.
Empowering holons with Natural Language Pro-
cessing (NLP) capabilities presents a transformative
approach to overcoming the aforementioned commu-
nication hurdles. Such capabilities can enable holons
to interpret and respond to natural language instruc-
tions, thereby simplifying the interaction between
holons and humans and reducing the reliance on in-
ternal system knowledge. Furthermore, this approach
facilitates holon-to-holon communication by encod-
ing and decoding machine-executable commands into
natural language. Thus, the NLP layer acts as a
communication layer among humans and holons, ag-
nostic to underlying CS heterogeneity and protocols,
thereby enhancing overall collaboration and adapt-
ability in SoS.
Recent research explores integrating NLP tech-
nologies, especially Large Language Models (LLMs),
into robots (Koubaa, 2023), leading to improved
human-robot collaboration. However, these studies
do not incorporate multi-robot functionality, which is
essential for robot-to-robot communication. Further-
more, their scope is limited to robotics rather than to
SoS and holonic architecture.
In this paper, we propose extending the holonic ar-
chitecture by integrating the NLP capabilities directly
into the holons. We present a conceptual framework
for NLP-enhanced SoS, enabling natural language in-
teraction and decision-making. Through the utiliza-
tion of advanced NLP technologies, such as LLMs,
our approach facilitates seamless communication and
collaboration within SoS. The framework’s practical
application is demonstrated through an Unmanned
Vehicle Fleet (UVF) case study. To the best of our
knowledge, this is the first work of its kind to explore
NLP-enhanced holonic architectures within the SoS
domain.
The remainder of this paper is organized as fol-
lows. Section 2 provides background information on
NLP and holonic architecture. Section 3 reviews the
state of the art in this topic. Section 4 details the pro-
posed conceptual framework incorporating NLP into
the holonic architecture. Section 5 demonstrates the
application of the framework to the UVF case study.
Section 6 presents ideas for evaluating the framework.
Section 7 discusses our findings and their implica-
tions. Finally, Section 8 concludes the paper by draw-
ing final conclusions and outlining potential avenues
for future work.
2 BACKGROUND
2.1 Natural Language Processing
Natural Language Processing (NLP) has become a
cornerstone of artificial intelligence, facilitating com-
munication between humans and computers (Khu-
rana et al., 2023). It encompasses various techniques
for enabling computers to understand, interpret, and
generate human language. Among these techniques,
Large Language Models (LLMs) have revolutionized
the capabilities of machines in processing and gener-
ating human-like text. These LLMs, such as BERT
(Bidirectional Encoder Representations from Trans-
formers) and GPT (Generative Pre-trained Trans-
former), are typically based on complex neural net-
works trained on extensive text datasets (Zhao et al.,
2023). Through training, these neural networks intri-
cate language features, including patterns, structures,
context, and semantics, enabling them to perform ad-
vanced such as text classification, sentiment analysis,
translation, and question-answering (Radford et al.,
2019; Brown et al., 2020). LLMs have found ap-
plications in diverse domains, including software de-
velopment tasks like programming and code genera-
tion (Sadik et al., 2023b). However, their integration
into broader human-system, inter-system, and intra-
system interactions is still in its early stages. This
paper focuses on exploring this potential for broader
integration.
2.2 Holonic Architecture for System of
Systems
Holons are autonomous yet connected entities that
possess independent functionalities while contribut-
ing to a larger system (Koestler, 1968). Due to their
dual nature, holons are excellent for modeling the
heterogeneous CSs, accurately reflecting their inde-
pendent functions and contributions to the overall
SoS (Blair et al., 2015).
ICSOFT 2024 - 19th International Conference on Software Technologies
428

3 RELATED WORK
Nundloll et al. (2020) utilized this concept of using
holons to model IoT systems and introduced a frame-
work that describes holons using ontologies. Elhab-
bash et al. (2024) adapted this framework to the SoS
domain and proposed an SoS architecture where CSs
are modeled as ontological holons. This architecture
allows CSs to reason about and understand each other,
facilitating CS discovery, ad-hoc scalability, and dy-
namic SoS composition.
However, this architecture assumes that the onto-
logical descriptions of the holons are manually pro-
vided by vendors or systems engineers. Addressing
this limitation, Zhang et al. (2023) propose an NLP-
based approach that automatically extracts ontologi-
cal descriptions of IoT devices by scraping web data.
While this approach offers automation, the holonic ar-
chitecture for SoS still lacks capabilities for holon-
to-environment communication (Halba et al., 2021),
human-to-holon interaction, and communication with
unknown holons.
4 CONCEPTUAL FRAMEWORK
Our proposed framework aims to address the com-
munication challenges inherent in SoS by leveraging
NLP techniques with a particular focus on enabling
holon-to-holon and holon-to-human communication.
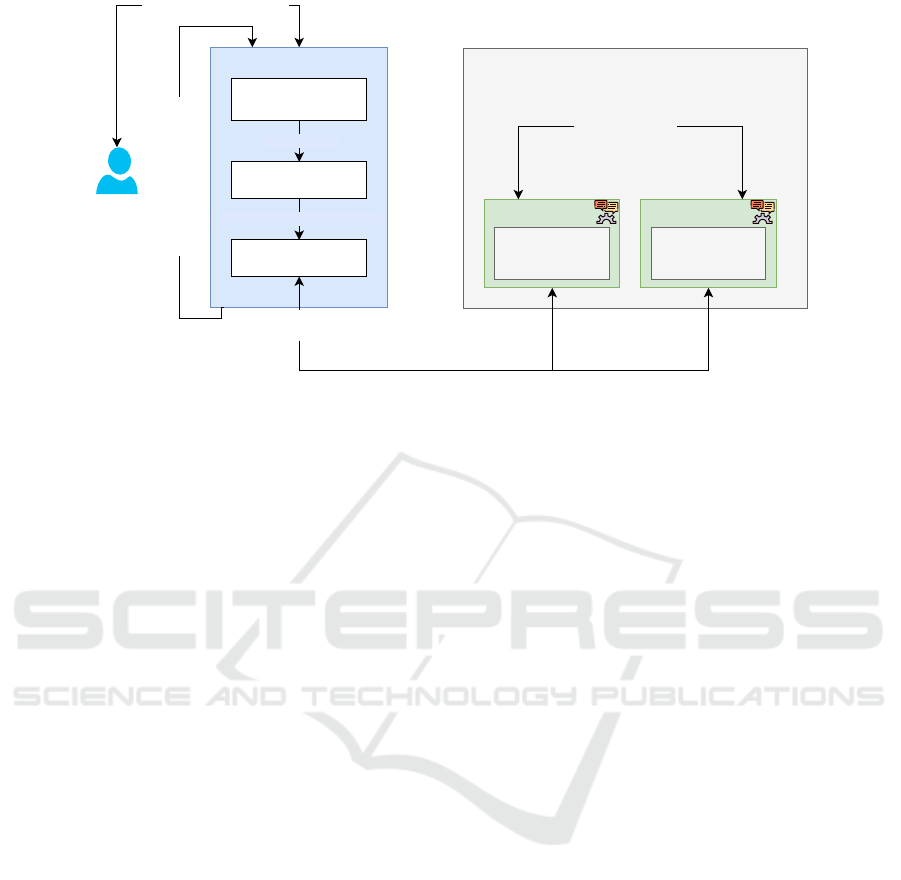
Figure 1 illustrates the framework depicting its com-
ponents and their interactions.
4.1 Overview
The framework involves a human operator who pro-
vides natural language instructions to the holons rep-
resenting the CS of an SoS. The instructions can range
from broad, high-level goals to specific tasks.
The CSs of the SoS are represented by holons
(e.g., Holon A and Holon B in Figure 1). Each holon
possesses specific capabilities or services, which are
the resources integrated into them. In addition, each
holon is also equipped with a localized NLP mod-
ule. These goals usually exceed the capabilities of
a single holon and require the collaboration of multi-
ple holons. The system then identifies relevant holons
based on their capabilities and orchestrates their col-
laboration to achieve the operator’s objectives.
4.2 NLP Integration Module
This module is the core of the framework. This
module comprises three components: ontology-based
prompt engineering, an LLM, and an NLP communi-
cation interface.
4.2.1 Ontology-Based Prompt Engineering
This component is responsible for crafting precise
and contextually relevant prompts by incorporating
domain-specific ontologies. This ensures that the op-
erator’s inputs are tailored accurately to the specific
needs of the SoS domain, thereby enhancing the ef-
fectiveness and precision of the LLM’s response (Sec-
tion 4.2.2).
4.2.2 Large Language Model (LLM)
This component utilizes NLP capabilities to under-
stand and generate natural language interactions. It
interprets the refined input from the prompt engineer-
ing component (Section 4.2.1), processes it, and con-
verts it into a syntax comprehensible to other hetero-
geneous holons of the SoS.
4.2.3 NLP Communication Interface
This interface translates the processed instructions
from the LLM into actionable commands for the
holons. These commands can activate or deacti-
vate the holons’ capabilities or services as needed to
achieve the overarching goal.
The NLP module provides feedback to the human
operator in the form of confirmation messages, clari-
fying questions, or summaries of the intended actions.
This allows the operator to verify the system’s under-
standing and make any necessary corrections or re-
finements.
4.2.4 Holon-Level NLP
Each holon is equipped with a localized NLP mod-
ule, including a domain-specific LLM, enabling it to
understand and generate natural language instructions
for both human-holon and holon-holon interactions.
The human-holon communication occurs when the
NLP Integration Module interacts with the localized
NLP module of holons. The holon-to-holon interac-
tion facilitates the holons to coordinate and exchange
system descriptions of their encapsulated system with
other holons using natural language (NL). As appar-
ent in the Figure 1, the holon-to-holon interaction is
possible even without the NLP Integration module.
This distributed approach enhances autonomy and re-
duces reliance on a centralized module.
Enhancing Holonic Architecture with Natural Language Processing for System of Systems
429
Natural Language Interaction
Human
Operator
Refined prompt
Ontology-based Prompt
engineering
NLP Communication
Interface
Capabilities
/
Services
System of Systems
Holon A
Capabilities
/
Services
Holon B
Translates to/from actionable commands and holon descriptions
NL Communication
Large Language Model
LLM
Generate structured commands
Refine Instructions (if needed)
NLP Integration Module
Figure 1: The conceptual framework showing NLP integration with the Holonic Architecture.
4.3 Holon Composition and
Collaboration
Holons, utilizing their embedded NLP capabilities,
interact with each other and the central NLP mod-
ule to determine their capabilities and relevance to
the goal. Through an iterative negotiation process,
holons commit to providing specific services, while
others may be deemed irrelevant. The relevant holons
then form a holon composition, collaborating to fulfill
the given mission.
This approach streamlines the process of achiev-
ing complex goals within an SoS. Instead of requiring
in-depth knowledge of each constituent system, the
operator can simply communicate their intent in nat-
ural language, and the framework handles the rest.
5 CASE STUDY:
NLP-INTEGRATED UVF FOR
URBAN MOBILITY
5.1 Overview
This case study explores the integration of the pro-
posed NLP-enhanced holon communication frame-
work (Section 4) into smart city transportation us-
ing Unmanned Vehicle Fleets (UVF). The UVF, op-
erating within a dynamic environment, exemplifies an
SoS with complex interaction dynamics and scalabil-
ity challenges such as evolving missions, expanding
range and capacity demands, vehicle failures, and bat-
tery limitations (Sadik et al., 2023a). It comprises
several autonomous entities, including Unmanned
Ground Vehicles (UGVs) and Unmanned Aerial Ve-
hicles (UAVs), each functioning as a holon, operating
independently as well as collaborating to achieve the
fleet’s overall objectives (Tchappi et al., 2020).
5.2 Scenario
Consider a scenario where a resident in a smart city
needs transportation from Position A to Position B.
The goal is to navigate the complex cityscape quickly
and efficiently, considering no-fly zones, traffic condi-
tions, and road layouts. This scenario presents several
challenges:
• Complex Urban Environment: Navigating
through a densely populated urban area with
varying altitudes and no-fly zones for UAVs.
• Dynamic Routing: Adapting in real-time to traffic
and environmental conditions to ensure the fastest
and safest route.
• Vehicle Coordination: Seamlessly transitioning
between UAVs and UGVs while maintaining a
consistent and comfortable experience.
• Communication: Ensuring clear and efficient
communication between the user, UVs, and the
control center to manage expectations and adapt
to any changes in the mission.
5.3 NLP-Enhanced UVF
Communication
Figure 2 illustrates the integration of NLP module
(Section 4.2) into the UVF communication frame-
work. This integration enhances both human-to-fleet
and intra-fleet communications.
ICSOFT 2024 - 19th International Conference on Software Technologies
430
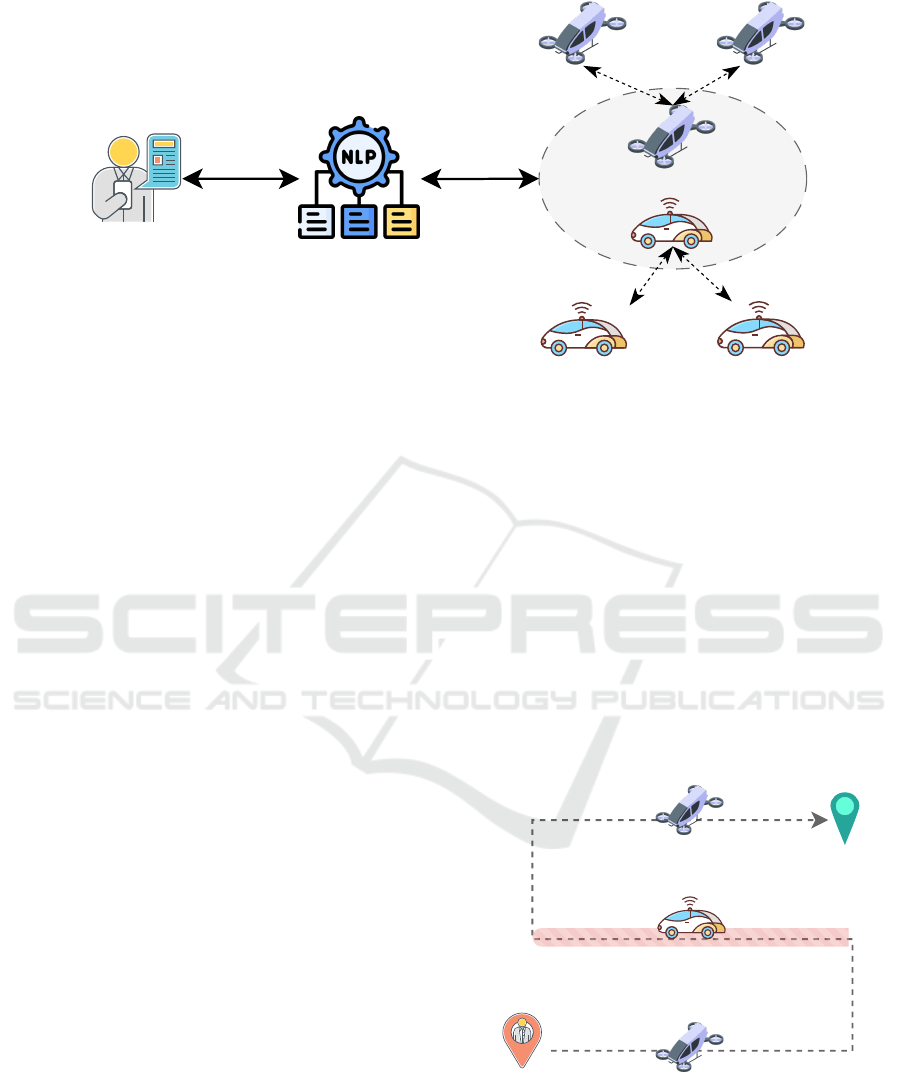
NLP Integration
Figure 2: Human-UV Interaction and Planning.
5.3.1 Human-UV Interaction
The user communicates their destination to the urban
mobility service using a natural language interface.
The NLP module’s ontology-based prompt engineer-
ing component (Section 4.2.1) refines this input, en-
suring it’s tailored to the UVF domain. The LLM
(Section 4.2.2) then interprets the request and initiates
mission planning.
5.3.2 Intra-Fleet Negotiation
To optimize efficiency, representative UVs from both
the UGV and UAV swarms are selected to interact
with the user and the urban mobility service. These
representatives use their localized NLP modules (Sec-
tion 4.2.3) to communicate with the rest of the fleet,
negotiating roles, paths, and timing based on indi-
vidual capabilities, current status, and environmen-
tal factors. This negotiation process aligns with Sec-
tion 4.2.4 and Section 4.3 parts of the framework.
For example, the UAV representative communi-
cates its estimated time of arrival at the no-fly zone
and available landing zones to the UGV representa-
tive. The UGV representative then analyzes potential
routes, considering traffic conditions and road lay-
outs, and proposes a suitable landing zone and ren-
dezvous time. The UAV and UGV representatives it-
erate on this process until a mutually agreeable plan
is reached.
5.4 Resulting UVF Composition
Following the negotiation process, a UVF is formed
to accommodate the no-fly zone (P
1
– P
2
in Figure 3).
This composition includes two UAVs for aerial seg-
ments and one UGV for ground transportation, show-
casing the dynamic SoS composition capability en-
abled by the framework. The UAV, upon reaching the
no-fly zone, communicates with the UGV in natural
language, I am approaching the no-fly zone. Please
prepare to receive the passenger at the designated
landing zone (Section 4.2.4). The UVs coordinate
seamlessly, ensuring a smooth transition for the user
at the landing and launch zones.
Upon reaching the predetermined landing zone
close to the user’s location (Position A), the first UAV
communicates with the UGV to prepare for a smooth
transition to the no-fly zone. The user is then trans-
ported by the UGV to a launch zone closer to his des-
tination, where the second UAV takes over to com-
plete the final leg of the journey.
A
B
P
1
P
2
Figure 3: Resulting UVF of two UAVs and one UGV (P
1
—
P
2
is no-fly zone).
Enhancing Holonic Architecture with Natural Language Processing for System of Systems
431

5.5 Mission Success Criteria
The success of the mission will be evaluated based on
the time taken to complete the mission, the number
of passengers successfully transported, the number of
successful negotiations among UVs, and the overall
satisfaction of the human operator with the system’s
performance. These metrics will provide valuable in-
sights into the effectiveness and usability of the NLP-
enhanced holonic architecture in real-world scenar-
ios.
6 EVALUATION
While this paper primarily focuses on presenting a
conceptual framework, we acknowledge the impor-
tance of evaluating its effectiveness in real-world sce-
narios. Future work will involve a rigorous evaluation
of the proposed NLP-enhanced holonic architecture
in a simulated environment, similar to the approach
used by (Sadik et al., 2023a). The implementation
can be done in by developing a multi-agent simulation
using a suitable framework (e.g., JADE), or a multi-
robot environment using ROS 2 and Gazebo to model
the interactions between the human operator, the NLP
module, and the holons.
Potential evaluation metrics could include:
• Task Completion Rate: The percentage of tasks
completed by the SoS using the NLP interface
compared to traditional methods.
• Communication Efficiency: The reduction in
communication overhead (e.g., message volume,
bandwidth usage) and time to complete tasks
achieved through NLP-based interaction.
• Communication Effectiveness: The percentage
of correctly interpreted user requests and holon-
generated instructions.
• Adaptability: The ability of the SoS to dynam-
ically reconfigure and adapt to changes in the
environment or mission objectives, facilitated by
NLP-based negotiation and coordination.
• Usability: Qualitative assessment of the ease of
use, intuitiveness, and user satisfaction of the NLP
interface for both human operators and holons.
By quantifying these metrics, we can assess the
impact of NLP integration on SoS performance and
identify areas for further improvement.
7 DISCUSSION
The integration of NLP within the holonic archi-
tecture offers several advantages that contribute to
the improved efficiency, adaptability, and usability of
SoS.
Firstly, by enabling natural language communi-
cation between the human operator and the holons,
the framework reduces the cognitive load on the op-
erator, who no longer needs to be familiar with the
specific syntax or protocols of each constituent sys-
tem. This streamlines the interaction process and al-
lows for more efficient task assignment and coordina-
tion. Traditionally, achieving a goal in an SoS would
require the operator to be familiar with the internal
workings of each CS. The operator would then need
to orchestrate these CSs together to design an SoS that
accomplishes the goal.
Secondly, the use of NLP enables the holons to
dynamically negotiate and adapt their roles based on
the given goal and the capabilities of other holons.
This adaptability is crucial in complex and dynamic
SoS environments where the composition of holons
may change over time. Finally, the intuitive nature
of natural language interaction enhances the overall
usability of the SoS, making it more accessible to a
wider range of users, including those without special-
ized technical knowledge.
8 CONCLUSION AND FUTURE
WORK
This paper introduces a novel approach to enhance
holon communication within SoS through Natural
Language Processing, aiming to bridge the communi-
cation gap between human operators and holons, and
among holons themselves. The proposed framework
demonstrates the potential for NLP to improve the ef-
ficiency, adaptability, and usability of SoS, paving the
way for more intuitive and effective system-level col-
laboration.
Overall, this field represents a promising area of
ongoing research, with future developments expected
to further refine and validate the proposed model in
practical SoS applications. In the short term, lever-
aging the ROS2 platform (Daubaris et al., 2023),
we are currently implementing the proposed frame-
work using the Holon Programing Model (Ashfaq
et al., 2024) and system architectures for autonomous
robots (M
¨
akitalo et al., 2021).
While the integration of LLMs into the holonic
architecture holds promise for enhancing interoper-
ability and adaptability, future research should also
ICSOFT 2024 - 19th International Conference on Software Technologies
432

address potential ethical concerns, such as privacy,
safety, and conflicts of interest (Rousi et al., 2023;
Levinson et al., 2024). Future work should also fo-
cus on addressing the challenges associated with nat-
ural language ambiguity, such as implementing clar-
ification dialogs. This can involve exploring the use
of domain-specific ontologies, controlled natural lan-
guages, clarification dialogs, and context-aware inter-
pretation. Additionally, there is a need to integrate
feedback mechanisms and validation techniques to
ensure robust and reliable communication within the
SoS, enabling continuous learning and improvement
of the NLP module.
REFERENCES
Ashfaq, M., Sadik, A. R., Mikkonen, T., Waseem,
M., and M
¨
akitalo, N. (2024). The holon pro-
gramming model for heterogeneous and adap-
tive system of systems. TechRxiv preprint
10.36227/techrxiv.171387729.91629072/v2.
Blair, G., Bromberg, Y.-D., Coulson, G., Elkhatib, Y.,
R
´
eveill
`
ere, L., Ribeiro, H. B., Rivi
`
ere, E., and Ta
¨
ıani,
F. (2015). Holons: Towards a systematic approach
to composing systems of systems. In 14th Interna-
tional Workshop on Adaptive and Reflective Middle-
ware, pages 1–6.
Brown, T., Mann, B., Ryder, N., Subbiah, M., Kaplan, J. D.,
Dhariwal, P., Neelakantan, A., Shyam, P., Sastry, G.,
Askell, A., et al. (2020). Language models are few-
shot learners. Advances in neural information pro-
cessing systems, 33:1877–1901.
Daubaris, P., Linkola, S., Kantosalo, A., and M
¨
akitalo,
N. (2023). Getting started with ROS2 development:
A case study of software development challenges.
In 2023 IEEE/ACM 5th International Workshop on
Robotics Software Engineering, pages 37–44.
Elhabbash, A., Elkhatib, Y., Nundloll, V., Marco, V. S., and
Blair, G. S. (2024). Principled and automated system
of systems composition using an ontological architec-
ture. Future Generation Computer Systems, 157:499–
515.
Halba, K., Griffor, E., Lbath, A., and Dahbura, A. (2021).
A framework for the composition of IoT and CPS ca-
pabilities. In IEEE 45th Annual Computers, Software,
and Applications Conference, pages 1265–1272.
Jamshidi, M. (2008). Systems of systems engineering: Prin-
ciples and applications. CRC press.
Khurana, D., Koli, A., Khatter, K., and Singh, S. (2023).
Natural language processing: State of the art, current
trends and challenges. Multimedia tools and applica-
tions, 82(3):3713–3744.
Koestler, A. (1968). The ghost in the machine. Macmillan.
Koubaa, A. (2023). ROSGPT: Next-generation
human-robot interaction with ChatGPT and ROS.
Preprints.org, 2023:2023040827.
Levinson, L., Dietrich, M., Sarkisian, A., Sabanovic, S., and
Smart, W. D. (2024). Privacy aware robotics. In Com-
panion of the 2024 ACM/IEEE International Confer-
ence on Human-Robot Interaction, pages 1335–1337.
M
¨
akitalo, N., Linkola, S., Laurinen, T., and M
¨
annist
¨
o, T.
(2021). Towards novel and intentional cooperation
of diverse autonomous robots: An architectural ap-
proach. In ECSA 2021 Companion, volume 2978 of
CEUR Workshop Proceedings.
Nielsen, C. B., Larsen, P. G., Fitzgerald, J., Woodcock, J.,
and Peleska, J. (2015). Systems of systems engineer-
ing: Basic concepts, model-based techniques, and re-
search directions. ACM Computing Surveys, 48(2):1–
41.
Nundloll, V., Elkhatib, Y., Elhabbash, A., and Blair, G. S.
(2020). An ontological framework for opportunistic
composition of IoT systems. In IEEE international
conference on informatics, IoT, and enabling tech-
nologies, pages 614–621.
Radford, A., Wu, J., Child, R., Luan, D., Amodei, D.,
Sutskever, I., et al. (2019). Language models are un-
supervised multitask learners. OpenAI blog, 1(8):9.
Rousi, R., Samani, H., M
¨
akitalo, N., Vakkuri, V., Linkola,
S., Kemell, K.-K., Daubaris, P., Fronza, I., Mikko-
nen, T., and Abrahamsson, P. (2023). Business and
ethical concerns in domestic conversational genera-
tive ai-empowered multi-robot systems. In Interna-
tional Conference on Software Business, pages 173–
189. Springer Nature Switzerland Cham.
Sadik, A. R., Bolder, B., and Subasic, P. (2023a). A self-
adaptive system of systems architecture to enable its
ad-hoc scalability: Unmanned vehicle fleet-mission
control center case study. In 7th International Confer-
ence on Intelligent Systems, Metaheuristics & Swarm
Intelligence, pages 111–118.
Sadik, A. R., Ceravola, A., Joublin, F., and Patra, J. (2023b).
Analysis of ChatGPT on source code. arXiv preprint
arXiv:2306.00597.
Tchappi, I. H., Galland, S., Kamla, V. C., Kamgang, J. C.,
Mualla, Y., Najjar, A., and Hilaire, V. (2020). A crit-
ical review of the use of holonic paradigm in traffic
and transportation systems. Engineering Applications
of Artificial Intelligence, 90:103503.
Zhang, Z., Elkhatib, Y., and Elhabbash, A. (2023). NLP-
based generation of ontological system descriptions
for composition of smart home devices. In IEEE Inter-
national Conference on Web Services, pages 360–370.
Zhao, W. X., Zhou, K., Li, J., Tang, T., Wang, X., Hou, Y.,
Min, Y., Zhang, B., Zhang, J., Dong, Z., Du, Y., Yang,
C., Chen, Y., Chen, Z., Jiang, J., Ren, R., Li, Y., Tang,
X., Liu, Z., Liu, P., Nie, J.-Y., and Wen, J.-R. (2023).
A survey of large language models. arXiv preprint
arXiv:2303.18223.
Enhancing Holonic Architecture with Natural Language Processing for System of Systems
433
