
Research on the Influence of Lane Width on Drivers' Dangerous
Lane Change Behavior on Urban Roads
Yuting Gao
School of Transportation Engineering, Chang’an University, Xi’an, Shannxi, 710000, China
Keywords: Lane Width, Drivers' Dangerous Lane Change Behavior, Linear Regression.
Abstract: Dangerous lane change behavior by drivers (DLCB) is defined as the behavior of the driver manipulating the
vehicle to produce excessive lane change behavior, which causes a certain degree of danger to the surrounding
vehicles or pedestrians. This paper investigates whether lane width and other factors have an impact on DLCB,
and explores the correlation between them. Multiple linear regression was used to analyze the relationship
between the number of dangerous lane changes and lane width, traffic flow, climate, light intensity and time.
Based on the results of the fitting, it can be found that lane width and traffic volume can explain more than
73% of the changes in DLCB. In addition, the reason for the analysis error may be that the bus stop does not
have a bus lane, which causes the bus behind to be forced to change lanes when the bus stops at the stop. At
present, there is no specific relationship between lane width and DLCB, but it is only pointed out that there
may be a correlation between the two. Therefore, the research in this paper can provide ideas for future road
design and planning to a certain extent.
1 INTRODUCTION
Lane width generally refers to the width of the lane
drawn on the road surface by markings, and the width
is determined according to the vehicle type, vehicle
speed, vehicle operation characteristics, etc. For a
long time, it was widely believed that the wider the
road, the safer it was (Zhu, 2023). The current road
engineering design code in China uses the vehicle as
the basic reference to determine the allocation of road
space, resulting in a clear preference for motor
vehicles in the right of way (Jiang 2022). Therefore,
the lanes are generally designed to be wider.
Theoretically, as the width of the lane decreases, the
road capacity decreases. However, in practice, there
is a high probability of uncivilized driving behaviors
(arbitrary lane changes, speeding, irregular
overtaking, etc.) in wide lanes, so a reasonable
reduction and adjustment of lane widths can limit
driving behavior and increase road capacity (Su
2022).
Lane change behavior is a driving behavior that
occurs more often in road traffic. According to
statistics, traffic accidents caused by inappropriate
lane changes account for about 10% of the total
number of accidents (Ning 2023). In addition,
frequent lane changes in congested road sections will
affect the overall traffic efficiency of traffic flow to a
certain extent, causing traffic congestion (China
Journal of Highway and Transport 2017). At present,
the most widely used types of lane change are divided
into mandatory lane change and arbitrary lane change
(Qi 2020). Lane change behavior is related to the
driver's hazard perception. Of all the skills related to
driving, only hazard perception is closely related to
traffic accidents (Wang 2019). Due to the driver's
incomplete observation of the traffic environment,
the distance between the vehicles that can be inserted
in the target lane is small, which may cause the
vehicle in the lane change to collide with the vehicle
in front or behind the target lane (Xia 2022).
Dangerous lane change can be defined as the behavior
of the driver manipulating the vehicle to change lanes
excessively, causing a certain degree of danger to
surrounding vehicles or pedestrians. If the lane
change time is defined by the lane change time, a lane
change time of less than 3 s is considered a dangerous
lane change (Qi 2020). Dangerous lane changes can
be subdivided into frequent lane changes, S-shaped
lane changes, continuous lane changes, and too fast
lane changes.
This paper focuses on arbitrary lane change
behavior and the influence of lane width on the
Gao, Y.
Research on the Influence of Lane Width on Drivers’ Dangerous Lane Change Behavior on Urban Roads.
DOI: 10.5220/0012797500004547
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Data Science and Engineering (ICDSE 2024), pages 405-409
ISBN: 978-989-758-690-3
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
405
number of dangerous lane changes of drivers is
studied, and the factors such as traffic flow, climate,
and light intensity are comprehensively considered.
2
METHOD
2.1 Data Sources and Descriptions
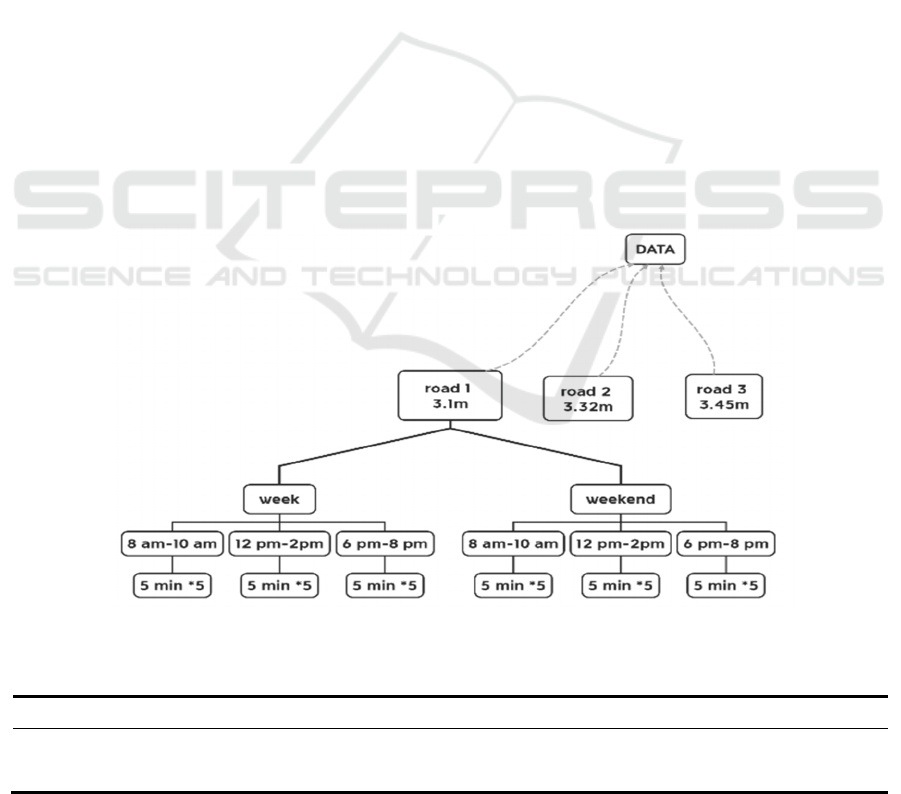
Combined with the street type and specific
construction conditions, the minimum width of a
motor lane in the road section can be narrowed to
2.85~3.25m according to different design speeds
(Jiang 2022). In this paper, three urban roads with a
width of 3.1 meters, 3.32 meters, and 3.45 meters
were selected as the research objects, and a total of 25
minutes of traffic flow videos were taken in the
morning (8 a.m. to 10 a.m.), noon (12 p.m. to 2p.m,),
and evening (18 a.m. to 8:00 p.m.) during the week
and on weekends, respectively, according to the ideas
shown in Fig. 1. At the same time, the climate of the
day is recorded.
2.2 Indicator Selection and Description
In this paper, the relationship between the number of
dangerous lane changes and lane width, light
intensity, traffic volume, and climatic conditions was
studied every 5 minutes. Traffic volume is defined in
this article as the total number of vehicles passing
through during that period. In addition, considering
that the number of lanes is different, it is difficult to
compare the number of lane changes, so the three
roads selected are all three lanes. Because the impact
of buses, cars and motorcycles on the road is
different, according to the vehicle conversion factor,
a bus can be converted into two cars, and a car can be
converted into two motorcycles, to convert the
number of vehicles and the number of times of the
driver's dangerous lane change behavior. Table 1
shows a portion of the DLCB of climate, temperature,
light intensity, and traffic volume recorded at the time
of data collection, as well as the measured lane width.
2.3
Method
Fig. 2 and Fig. 3 plot the relationship between the lane
width and the traffic volume of the DLCB,
respectively, and it can be seen that there is a linear
relationship between the lane width and the traffic
volume and the DLCB. Therefore, this paper is more
suitable for multiple linear regression analysis to
analyze the numbers.
Figure 1: Data collection ideas (Original).
Table 1: Some data are displayed.
Numbering Lane width/m Time Weather Temp. Light Num. of vehicles DLCB
1 3.1 12:35 cloud
y
20 strong 113 3
2 3.32 9:50 Sun. 7 Weake
r
164.5 6.5
3 3.45 12:40 cloud
y
20 strong 216 7
ICDSE 2024 - International Conference on Data Science and Engineering
406

Figure 2: Scatterplot of the lane width and DLCB (Original).
Figure 3: Scatterplot of the number of traffic and DLCB (Original).
Linear regression is a simple method of
regression analysis that explores the linear
relationship between two variables. Multiple linear
regression is an extension of linear regression that
explores the linear relationship between multiple
independent variables and one dependent variable
(Zhang 2022). The principle is to estimate the
regression coefficient by minimizing the sum of
squares of the residuals, so that the residuals between
the predicted and observed values are minimized. It
can help to understand the relationship between
variables and can help us determine the effect of
different independent variables on the dependent
variable, and in turn, determine the most relevant
independent variables (Jiang 2022). At the same time,
it provides a hypothesis test on whether the regression
coefficient is significant to help evaluate the
statistical significance of the model. Therefore, it is
appropriate to choose multiple linear regression in
this paper.
This paper examines whether the number of
dangerous lane changes is related to lane width.
Therefore, linear regression can be used to study
whether there is a correlation between the two, that is,
the number of dangerous lane changes of drivers is
the dependent variable Y, and the lane width is the
independent variable X. At the same time, it is also
necessary to consider the time (there may be
differences in the state of the driver in the morning,
noon and evening), climate environment, light
intensity and other factors, so the data processing
method can be used by multiple linear regression. In
addition, in order to test the rationality of the model,
20% of the data were randomly selected for the test
of the final regression equation, and the remaining
80% was used for regression training.
3 RESULT AND DISCUSSION
3.1 Data Analysis
The results of linear regression fitting are shown in
Table 2 with lane width, traffic flow, weather,
temperature and light intensity as the independent
variables, and
X
,X
,X
,X
,X
the number of
dangerous lane changes of drivers as the dependent
variables Y.
Research on the Influence of Lane Width on Drivers’ Dangerous Lane Change Behavior on Urban Roads
407
Table 2: Fitting results of traffic volume, lane width, climate, etc., to the number of DLCB.
B standard error Beta t p VIF Tolerance
constant -7.638 2.476 - -3.085 0.003 - -
Lane width 1.990 0.837 0.149 2.376 0.019 1.836 0.545
Traffic Num. 0.036 0.003 0.750 11.846 0.000 1.872 0.534
Weathe
r
-0.116 0.202 -0.027 -0.576 0.566 1.050 0.952
temperature 0.003 0.015 0.011 0.231 0.818 1.091 0.917
Li
g
ht intensit
y
0.122 0.098 0.059 1.245 0.216 1.061 0.943
R
2
0.743
Ad
j
ust R
2
0.732
F F (5,120) =69.408, p=0.000
D-W values 1.687
Dependent variable: Number of dangerous lane change behavior
* p<0.05 ** p<0.01
Table 3: Linear regression analysis results.
B standard erro
r
Beta t
p
VIF Tolerance
constant -7.173 2.413 - -2.973 0.004 - -
Lane width 1.870 0.818 0.140 2.287 0.024 1.766 0.566
Traffic 0.036 0.003 0.761 12.427 0.000 1.766 0.566
R
2
0.739
Adjust R
2
0.735
F F (2,123) =174.002, p=0.000
D-W values 1.657
Dependent variable: Number of dangerous lane change behavior
* p<0.05 ** p<0.01
As can be seen from the above table 2, the model
formula is as follows:
𝑌 = −10.660 + 2.893𝑋
+ 0.036𝑋
− 0.077𝑋
(1)
The R 2 value of the model is 0.743, which means
that lane width, traffic flow, weather, temperature,
light intensity, and time can explain 74.3% of the
change in the Number of dangerous lane change
behavior. When the model was tested F, it was found
that the model passed the F test, which means that at
least one of the lane width, traffic flow, weather,
temperature, light intensity, and time would affect the
number of dangerous lane change behaviors. In
addition, the multicollinearity of the model is tested,
and it is found that all the VIF values in the model are
less than 5, which means that there is no collinearity
problem, and the D-W value is around the number 2,
which indicates that there is no autocorrelation
between the model and the sample data. According to
the summary analysis of the t-test and the p-test, it can
be found that the number of traffic, the lane width has
a significant positive effect on the number of
dangerous lane change behavior. However, weather,
temperature, light intensity, and time of day do not
affect the number of dangerous lane change
behaviors.
Excluding the factors of weather, temperature,
light intensity, and time, the results of linear
regression fitting are shown in Table 3.
As can be seen from the table 3 above, the model
formula is:
Y = -7.173 + 1.870X
+ 0.036X
(2)
The model R 2 value is 0.893, which means the
lane width, and the traffic volume can explain 89.3%
of the change in the number of dangerous lane change
behaviors.
3.2 Discussion
According to the results of multiple linear regression
fitting, it can be seen that there is a linear regression
relationship between the number of dangerous lane
change behaviors and lane width and traffic flow, but
the fitting results can only explain 89.3% of the
change reasons. This may be because there are bus
stops on the selected section, but there are no bus
lanes, so when the bus stops, the cars behind can only
change lanes. However, the frequency, stop time, and
number of stops on the three roads are not the same,
so the influence of bus stops on the number of
dangerous lane changes cannot be ruled out.
Although it is not possible to rule out the influence of
bus stops on the number of dangerous lane changes,
it is clear that the number of dangerous lane changes
of drivers is indeed related to lane width.
ICDSE 2024 - International Conference on Data Science and Engineering
408

4 CONCLUSION
Dangerous lane change refers to a driver's behavior of
excessively changing lanes, posing a certain degree
of danger to surrounding vehicles or pedestrians. In
this paper, three urban roads with different lane
widths in Yan'an, Shaanxi Province, were selected to
collect data on traffic flow, climate, and the number
of dangerous switching behaviors in 5 minutes.
Linear regression analysis was carried out with lane
width, traffic flow, weather, temperature, light
intensity, and time as independent variables, and the
number of dangerous lane change behaviors of
drivers as dependent variables. According to the final
results, it can be found that the traffic flow of lane
width significantly affects the number of dangerous
lane change behaviors, and can explain 89.3% of the
change of dangerous lane change behaviors.
However, the bus stop does not set up a bus lane,
which will have a significant impact on the driver to
change lanes, so it will lead to a large part of the data
test.
REFERENCES
R. Zhu, Experimental study on the measurement of driver's
psychological stress under lane constraints,
(2023)https://link.cnki.net/doi/10.27242/d.cnki.gnjlu.2
023.000100.
Y. Jiang, Urban Planning, 46,62-70, 2022.
X. Su, Journal of Wuhan University of Technology
(Transportation Science and Engineering), 46, 592-597,
2022.
H. Ning, Research on the relationship between unsafe
driving behavior and road traffic accidents, (2023)
https://link.cnki.net/doi/10.27205/d.cnki.gltec.2023.00
0010.
China Journal of Highway and Transport, 30, 1-197(2017).
Y. Qi, Wuhan University of Technology, 05, 85(2020).
M. Wang, Transportation Science and Engineering, 35,
106-112(2019).
H. Xia, Research on the identification method of dangerous
driving behavior in the merging area of urban
expressway based on vehicle trajectory,
(2022)https://link.cnki.net/doi/10.27671/d.cnki.gcjtc.2
022.000536.
H. Zhang, Automation and Instrumentation, 1-4+8, (2022).
J. Jiang, Research on heteroskedasticity in multiple linear
regression models, (2022) https://link.cnki.net/
doi/10.27050/d.cnki.gglgc.2022.000.
Research on the Influence of Lane Width on Drivers’ Dangerous Lane Change Behavior on Urban Roads
409
