
Enhancing Continuous Optimization with a Hybrid History-Driven
Firefly and Simulated Annealing Approach
Sina Alizadeh and Malek Mouhoub
a
Department of Computer Science, University of Regina, Regina SK, Canada
{sau564, mouhoubm}@@uregina.ca
Keywords:
Feature Landscaping, Metaheuristics, Firefly, Simulated Annealing.
Abstract:
In this study, we propose a hybrid History-driven approach through collaboration between Firefly (FA) and
Simulated Annealing (SA) algorithms, to improve the hybrid framework performance in finding the global
optima in continuous optimization problems in less time. A Self-Adaptive Binary Space Partitioning (SA-
BSP) tree is used to partition the search space of a continuous problem and guide the hybrid framework towards
the most promising sub-region. To solve the premature convergence challenge of FA a ”Finder − Tracker
agents” mechanism is introduced. The hybrid framework progresses through three main stages. Initially, in
the first phase, the SA-BSP tree is utilized within the FA algorithm as a unit of memory. The SA-BSP tree
stores significant information of the explored regions of the search space, creates the fitness landscape, and
divides the search space during exploration. Moving on to the second phase, a smart controller is introduced
to maintain a balance between exploration and exploitation using HdFA and SA. During the third step, the
search is limited to the most promising sub-region discovered. Subsequently, the SA algorithm employs the
best solution’s information, including its fitness value and position, to efficiently exploit the limited search
space. The proposed HdFA-SA technique is then compared against different metaheuristics across ten well-
known unimodal and multimodal continuous optimization benchmarks. The results demonstrate HdFA-SA’s
exceptional performance in finding the global optima solution while simultaneously reducing execution time.
1 INTRODUCTION
Solving optimization problems can present significant
challenges due to their frequently non-linear nature,
existing numerous local optima, and dealing with
large search spaces (Zhang et al., 2016). Optimiza-
tion problems range from scheduling tasks, and bal-
ancing loads in telecommunication networks (Jafarian
et al., 2014) to Deep Learning Training (Kingma and
Ba, 2014), Distributed Data Processing (Zaharia et al.,
2012), Cluster Scheduling (Schwarzkopf et al., 2013),
and robust combinatorial optimization in the form of
minimax optimization(Shao et al., 2022). Many meta-
heuristics have been proposed over the past decades
to find the optimal solution (Talbi, 2009; Korani and
Mouhoub, 2021; Hmer and Mouhoub, 2016; Bidar
and Mouhoub, 2022).
Metaheuristics represent strategies that are in-
spired by nature and can be classified as bio-inspired,
population-based, or physical and chemical-based
approaches. Population-based algorithms include
evolutionary methods such as Genetic Algorithms
a
https://orcid.org/0000-0001-7381-1064
(GAs) (Holland, 1992), and Swarm Intelligence (SI)
methods such as Particle Swarm Optimization(PSO)
(Kennedy and Eberhart, 1995), Ant Colony Opti-
mizer(ACO) (Dorigo et al., 2006), Artificial Bee
Colony (ABC), and the Firefly Algorithm (FA) (Yang,
2009). Physical-chemical-based algorithms include
Simulating Annealing (SA)(Kirkpatrick et al., 1983)
which is a single solution algorithm that focuses on
modifying and improving a single candidate solution.
Other single solution algorithms include Iterated Lo-
cal Search (ILS) (Lourenc¸o et al., 2003), and Vari-
able Neighborhood Search (VNS) (Mladenovi
´
c and
Hansen, 1997). While metaheuristics have resulted
in positive outcomes and benefits, they confront chal-
lenges such as the inability to discover the global opti-
mum, premature convergence, and lengthy execution
times. Moreover, based on the No Free Lunch (NFL)
theorem (Wolpert and Macready, 1997), no algorithm
can be the best for all optimization problems. The
challenges encountered have led researchers to design
hybrid cooperative framework strategies. These tech-
niques aim to increase the accuracy of metaheuris-
tics through a collaboration of several algorithms to
120
Alizadeh, S. and Mouhoub, M.
Enhancing Continuous Optimization with a Hybrid History-Driven Firefly and Simulated Annealing Approach.
DOI: 10.5220/0012812900003758
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2024), pages 120-127
ISBN: 978-989-758-708-5; ISSN: 2184-2841
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

develop efficient hybrid methodologies for optimiza-
tion problems (Blum and Roli, 2008). In the field of
hybrid optimization algorithms, numerous combina-
tions of popular optimization methods have been de-
veloped, such as CS/PSO by Ghodrati and Lotfi (Gho-
drati and Lotfi, 2012), HEPSO (Mahmoodabadi et al.,
2014), HAP (Kıran et al., 2012), and HP-CRO (hybrid
of PSO and CRO) (Nguyen et al., 2014). Kao and Za-
hara applied a combination of GAs and PSO to solve
17 test problems (Kao and Zahara, 2008). They ob-
served that despite this strategy requiring more time
for extensive function evaluations, it resulted in fewer
average errors when compared with (Chelouah and
Siarry, 2000) and CHA(Chelouah and Siarry, 2003)
approaches. Zhang and Li developed a hybrid algo-
rithm HP-CRO, based on a combination of PSO with
chemical reaction optimization (Nguyen et al., 2014).
They utilized this method to solve 30-dimensional
Rosenbrock and Schwefel 2.22 functions, attaining
superior outcomes relative to the RCCRO algorithm,
with errors diminishing to as minimal as 5.52E + 00
and 4.22E − 06. Farnad et al. (Farnad et al., 2018),
developed a hybrid algorithm combining PSO, GA,
and SOS for improved global search in complex
search spaces. Their HPG-SOS method optimized
functions more rapidly, and they introduced a new
PSO variant, HEPSO, outperforming other algorithms
(Mahmoodabadi et al., 2014). In a previous work, we
introduced a self-adaptive hybrid framework to en-
hance the cooperation between PSO and SA based
on a self-adaptive BSP tree and maturity condition
to find the best iteration to switch from HdPSO to
SA. The proposed HdPSO-SA was tested on 10 well-
known continuous benchmarks. The findings demon-
strated that the hybrid HdPSO-SA algorithm achieved
superior performance by identifying the global op-
tima more efficiently with less running time than tra-
ditional metaheuristics, including FA, PSO, DE, SA,
and GA (Alizadeh and Mouhoub, 2023). Following
on this previous research about cooperation between
heuristics based on a history-driven method, in this
study, we will show how the proposed Self-Adaptive
BSP tree approach is applicable in different meta-
heuristics to enhance the collaboration between them
and finding the global optima in less time. In this
study, we use FA instead of PSO as the exploration al-
gorithm due to the method’s efficiency in exploration
and SA for exploitation. According to the negative
effect of premature challenge on metaheuristics es-
pecially in FA and potentially increasing the running
time due to less effective exploration of the solution
space (Khan et al., 2016), In this context, we propose
an approach called ”Finder − Tracker agents” to deal
with this challenge. Besides, we mention the destruc-
tive effects of this challenge on the proposed SA-BSP
tree and the approximated fitness landscape. An inno-
vation of this work is the proposed ”Finder −Tracker
agents” method, which maintains population diversity
during the exploration and increases the accuracy of
the SA-BSP tree in finding the most promising sub-
region in the given search space.
2 BACKGROUND
Binary Space Partitioning (BSP) tree is a basic data
structure introduced in computer graphics and com-
putational geometry, utilized to enhance the efficiency
of metaheuristic algorithms through a historical data-
driven approach (Yuen and Chow, 2008). In contin-
uous optimization problems, the Binary Space Parti-
tioning (BSP) tree is employed to partition the search
space S. This method additionally keeps track of the
valuable gathered information during the exploration
of search space and the position and fitness value of
newly generated solution [s
i
, f (x
i
)], acting as a stor-
age component for metaheuristics. In (Alizadeh and
Mouhoub, 2023), we indicated that the fitness approx-
imation method based on the BSP tree has two limi-
tations. Consequently, HdPSO calculates the fitness
values for all solutions generated, both in unpromis-
ing and the most promising sub-regions. implement-
ing the BSP tree to identify the most promising region
before switching from HdPSO to SA leads to comput-
ing all generated solutions, which causes extra parti-
tioning (unnecessary nodes), extra running time and a
deep BSP tree with lower accuracy. To address BSP
tree limitations, we offered a novel Self-adaptive BSP
tree for an improved fitness landscape prediction and
node insertion technique. Besides, a novel approach
to continuous optimization through the development
of the hybrid HdPSO-SA method and the incorpo-
ration of a self-adaptive Binary Space Partitioning
(BSP) tree to guide the HdPSO-SA algorithm to iden-
tify the most promising subregion introduced. This
self-adaptive mechanism, referred to as the SA-BSP
tree, serves a dual function: it partitions the search
space into manageable sub-regions and stores critical
information about these segments, such as fitness val-
ues and their spatial coordinates. Initially, the hybrid
model starts with limited information about the search
space. However, as HdPSO progresses, accumulat-
ing data in its long-term memory, the framework’s
knowledge of the search space expands significantly.
The maturation of the SA-BSP tree is crucial for en-
hancing the precision of the fitness landscape evalu-
ation. A primary focus of HdPSO within this hybrid
model is to explore the search space, continuously up-
Enhancing Continuous Optimization with a Hybrid History-Driven Firefly and Simulated Annealing Approach
121
dating the SA-BSP tree with new fitness values and
positional information to accurately form the fitness
landscape. This process is instrumental in guiding
the algorithm towards promising sub-regions, thereby
optimizing the efficiency of the search by avoiding
less promising areas. This strategic approach not
only enhances the search efficiency but also signifi-
cantly reduces the computational time required. The
exploration-exploitation (E-E) trade-off, a fundamen-
tal challenge in optimization algorithms, is adeptly
managed within this framework by the introduction
of a smart maturity condition, denoted as α
ave
. Upon
meeting this maturity criterion, the algorithm transi-
tions to a phase where the optimal solution, along
with its specific sub-region coordinates, is passed for
exploitation by the Simulated Annealing (SA) pro-
cess. This phase limits the search to a specific sub-
region, leveraging the detailed coordinates provided
by the SA-BSP tree to achieve significant exploita-
tion. Furthermore, the publication explores the trans-
formation process of the BSP tree into a self-adaptive
entity through the development of the innovative SA-
BSP maturity condition. This transition is pivotal for
the approximation of fitness values, aimed at enhanc-
ing time efficiency without compromising the quality
of the search results. The steps involved in the im-
plementation of the HdPSO-SA method are outlined
in detail, highlighting the innovations and the results
in 10 well-known continuous benchmarks (Alizadeh
and Mouhoub, 2023).
3 HISTORY-DRIVEN
FIREFLY-SIMULATED
ANNEALING (HDFA-SA)
The primary purpose of this study is to demon-
strate how the proposed SA-BSP tree in (Alizadeh
and Mouhoub, 2023) applies to other metaheuristics
(Firefly in this study). Another aspect of this study is
to show the negative effects of premature convergence
on the proposed SA-BSP tree. To achieve our objec-
tives, we utilized the Firefly Algorithm (FA) because
of its proficiency in global search optimization and
Simulated Annealing (SA) for its effectiveness in ex-
ploitation tasks. Since premature convergence is the
main cause of the FA algorithm getting stuck in local
optima a method known as ”Finder Tracker agents”
is introduced to manage premature convergence. In
the subsequent sections, we delve into the steps of
HdFA-SA, as illustrated in Figure 1. Following this,
we examine the adverse impacts of premature con-
vergence on the SA-BSP tree utilizing the provided
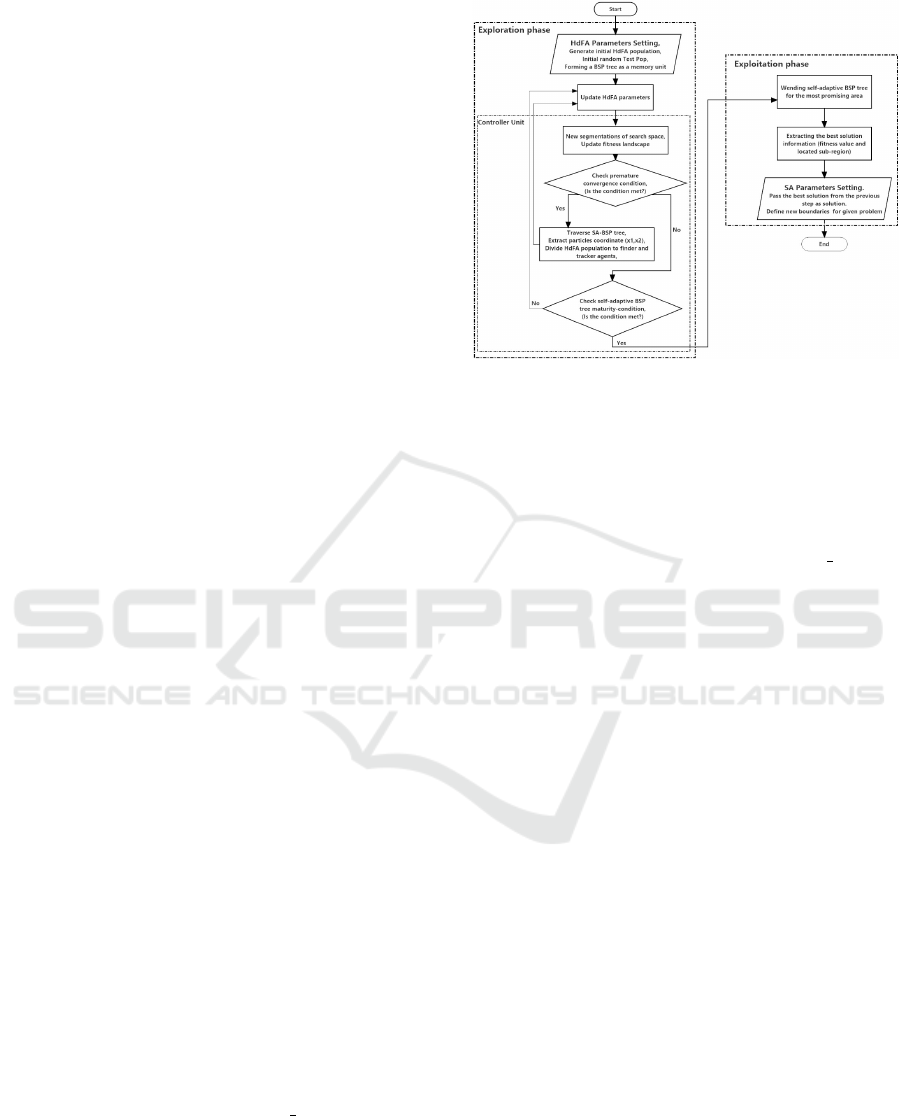
Figure 1: HdFA-SA flowchart.
multi-modal Michalewicz function. Subsequently, we
introduce the ’Finder Tracker Agents’ approach. Fi-
nally, we present the outcomes of HdFA-SA across 10
continuous benchmarks.
Figure 1 shows the hybrid HdFA-SA approach us-
ing a self-adaptive BSP tree as HdFA’s memory to ac-
cumulate search progress benefited ”Finder Tracker
agents” approach. Figure 1 describes HdFAb inte-
grated with a self-adaptive Binary Space Partitioning
(BSP) tree structure and SA. The process is divided
into two main phases: exploration and exploitation.
During the exploration phase, the algorithm sets up
the parameters for the HdFA and generates an initial
population alongside an SA-BSP tree to serve as a
memory unit. This is a dynamic phase where the al-
gorithm continuously updates the parameters and seg-
ments the search space to create the fitness landscape
and approximate the fitness values for the next iter-
ations. It checks for premature convergence, which
could indicate that the algorithm is not exploring the
search space adequately and is instead settling on lo-
cal optima. If this condition is met, the algorithm
proceeds to navigate through the HdFA, adjusting its
population into finder and tracker agents to diversify
the search. This process is iterative and continues un-
til a maturity condition for the self-adaptive BSP tree
is satisfied, suggesting that the exploration has been
thorough. In the exploitation phase, the focus shifts
to intensifying the search around the most promising
area identified in the exploration phase. The algo-
rithm focuses on the best solution identified, as deter-
mined by the fitness value and a specific sub-region of
the search space. At this stage, the parameters for SA
are configured, leveraging the best solution obtained
from the exploration as a starting point for further ex-
ploitation. New boundaries for the given problem are
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
122

established based on the findings, which means lim-
iting the search to only the most promising subregion
that is explored from the SA-BSP tree.
To show the ability of the SA-BSP tree (proposed
in (Alizadeh and Mouhoub, 2023)) to enhance the
collaboration between metaheuristics, in this study,
we use FA instead of PSO for the exploration phase.
The proposed HdFA-SA (algorithm 1) is based on the
behavior of fireflies attracted to each other’s bright-
ness, combined with simulated annealing to exploit
the limited subregion only. In contrast, the HdPSO-
SA uses particle swarm principles, guiding particles
towards optimal solutions based on individual and
collective experience, also enhanced by simulated an-
nealing. Another difference between HdFA-SA and
HdPSO-SA is the HdFA-SA algorithm is equipped
with ”Finder − Tracker agents” (algorithm 2)to pre-
vent early convergence if happens as shown as an
update in figure1. In other words, In this study
”Finder − Tracker agents” approach is added to the
controller unit of HdFA-SA figure 1 and is used to
update the Tracker agents differently if the condition
τ is met.
Algorithm 1 shows the proposed HdFA-SA algo-
rithm starts by taking input parameters based on pro-
vided steps in figure 1, including SA-BSP tree param-
eters size pop
test
, HdFA fireflies (pop
real
), number
of neighbors n, number of HdFA and SA iterations,
HdFA parameters (γ, β
0
), and SA parameters (T , k,
c). From lines 2 to 10, the algorithm applies the ex-
ploration steps based on HdFA and updates the for-
mula. In line 10 The SA-BSP tree is traversed for
every generated new solution s
i
to extract the location
of s
i
. line 12 indicates that If the extracted sub-region
includes the lowest fitness value, it will be partitioned
and the new solution’s exact fitness value will be cal-
culated. Otherwise, the region is not divided into new
segments and the previous fitness value of the seg-
ment is assigned to s
i
. α
i
represents the difference
of two values estimated fitness of sub-region h
j
ex-
tracted from the BSP tree for m
i
and the actual fitness
of m
i
. Lines 24 - 26 determine that the maturity con-
dition will be met if α
ave
has a downward trend or
remains stable for l iterations or reaches zero. α
i
and
α
ave
are calculated for each iteration. According to
maturity condition α
ave
, if the SA-BSP tree has ma-
tured, then the algorithm will switch from HdFA to
SA, and the fitness value and position of a solution s
and the coordinates of a sub-region containing solu-
tion s are returned (lines 27 - 29). once the maturity
condition is met, The algorithm passes the HdFA best
solution to SA and limits the search space to the sub-
region containing the best solution s. If the SA-BSP
tree is immature, the algorithm iterates for better
Algorithm 1: Pseudocode of HdFA-SA Algorithm.
1: Input: SA-BSP tree as memory, size pop
test
, number of fire-
flies (pop
real
), HdFA iterations, light absorption coefficient γ,
attractiveness β
0
, SA iterations, reduction factor c, tempera-
ture T , Boltzmann’s constant k,
2: Initialize pop
test
and HdFA fireflies pop
real
with random po-
sitions the SA-BSP tree maturity condition α
ave
is not met
i = 1; i ≤ pop
real
j = 1 ;i ≤ pop
real
f (s
i
) < f (s
j
)
3: Calculate attractiveness β = β
0
· exp(−γ · |s
i
− s
j
|
2
)
4: Move firefly i towards j based on attractiveness and random-
ness
5: s
i
= s
i
+ β · (s
j
− s
i
) + α ·(rand −0.5)
6: Evaluate new solutions and update light intensity
7: Traverse SA-BSP tree and extract the s
i
sub-regions s
i
is lo-
cated in the most promising region among n neighbors
8: Accept s
i
and evaluate objective function f (s
i
)
9: Segment sub-region h
i
10: Update the SA-BSP tree child and parent nodes information
f (s
i
) <
˜
f (s
i
)
11: Update the value of f (s
i
) for
˜
f (s
i
)
12: Reject s
i
and avoid evaluating objective function f (s
i
)
13: Accept the value of
˜
f (s
i
) for f (s
i
)
14: No segmentation
15: α
i
= | f (m
i
Po p test
) −
˜
f (m
i
Po p test
)|
16: α
ave
=
∑
i
1
(α)
i
α
ave
has a downward continual trend for l
iterations or
17: α
ave
remains stable in l iterations or
18: α
ave
= 0
19: BSP tree maturity condition is set to True
20: Return fitness value and position of solution s by traversing
BSP tree
21: Return the coordinates of the sub-region containing solution
s
22: Go to step 3
23: iter = iter +1
24: Pass the optimal solution s position to SA for exploitation.
25: Limit the search space to the most promising sub-region.
SA iteration number is not reached
solution s
f (s + ∆x) > f (s)
26: f
new
= f (s + ∆x) ; s = s +∆x
27: ∆ f = f (s +∆x) − f (s)
28: random r ∈ (0, 1) r > exp(−∆ f /kT )
29: f
new
= f (s + ∆x) , s = s +∆x
30: f
new= f (s)
31: end For
32: f = f
new
33: T = c × T (Decrease the temperature periodically)
34: end While
solutions and sub-regions. SA employs the solution s
and starts the search progress with a probability of ac-
cepting a less optimal solution to address the local op-
tima challenge. Lines 35 to 48 indicate the SA method
to exploit the limited search space. (Rere et al., 2015)
3.1 Premature Convergence and
Finder-Tracker Agents Method
Premature convergence represents a significant chal-
lenge in metaheuristic algorithms. These algorithms
may suffer from premature convergence and poor
global exploration when implemented to optimize
Enhancing Continuous Optimization with a Hybrid History-Driven Firefly and Simulated Annealing Approach
123
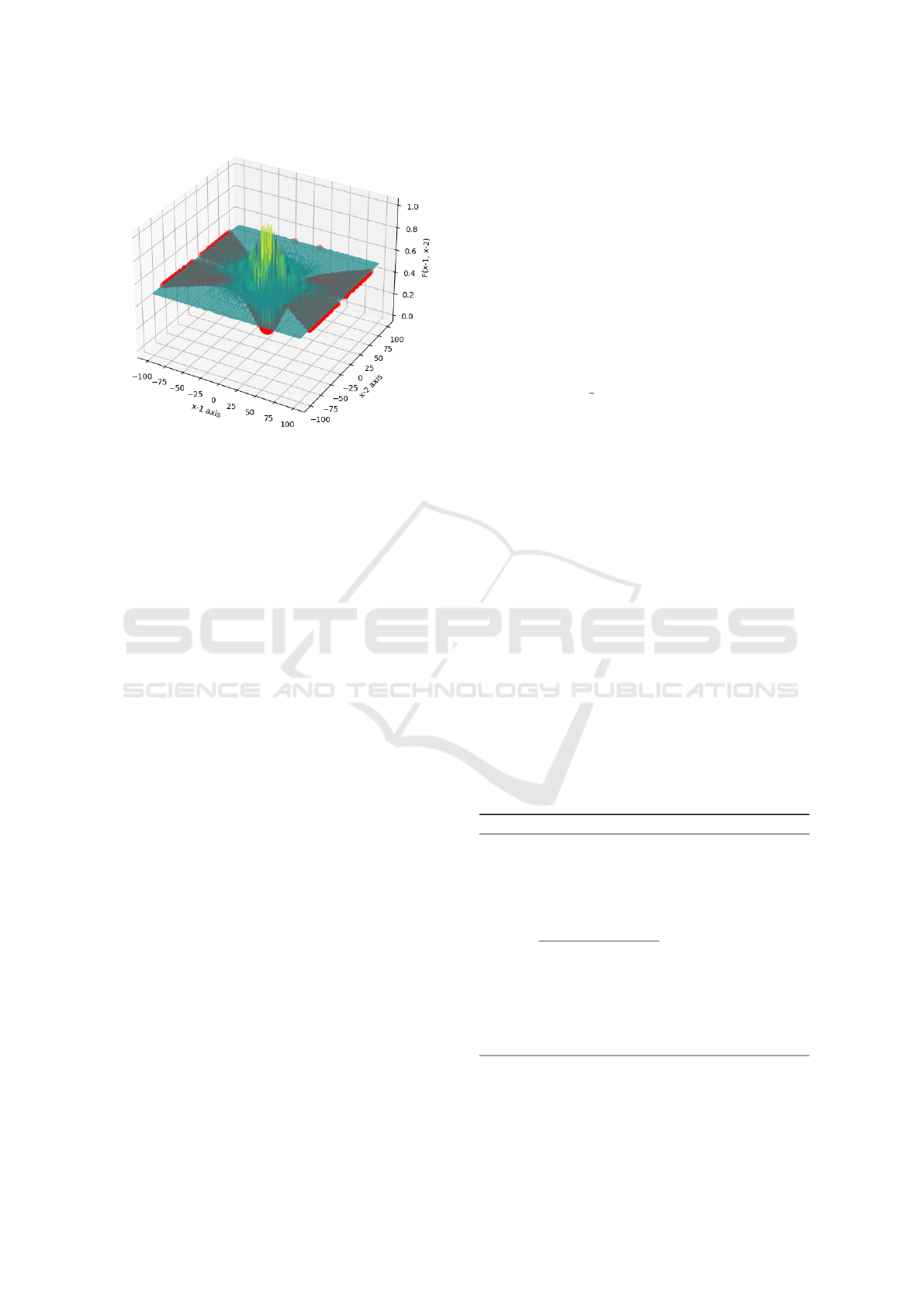
Figure 2: 3-D Schaffer function.
complex and high-dimension continuous optimiza-
tion problems.
To show the negative impacts of premature con-
vergence in multi-local problems we utilize the Schaf-
fer function as an example. Figure 2 shows the Schaf-
fer function ( f
4
in Table 1 of (Alizadeh and Mouhoub,
2023)), particularly with the highlighting of local op-
tima (or traps) with red. The red points are where the
function value is lower compared to the immediate
surroundings, making them ”traps” for optimization
algorithms. In a minimization problem, metaheuris-
tic algorithms might converge to these points believ-
ing in reaching the global optima. While the Schaffer
function is a theoretical construct used primarily for
benchmarking and testing, its challenges reflect real-
world optimization problems in various fields such as
engineering design, financial modeling, logistics, and
machine learning. The Firefly algorithm might suffer
from premature convergence when the members set-
tle into a local optimum due to the very close fitness
values.
In this work, early convergence severely limits the
Firefly Algorithm’s (FA) exploration capabilities, re-
sulting in an incomplete search history and an un-
derdeveloped Binary Space Partitioning (BSP) tree.
This constraint not only prevents the algorithm from
thoroughly exploring viable solutions but also reduces
the BSP tree’s ability to predict the best exploration-
exploitation (E-E) trade-off point between FA and
Simulated Annealing (SA). Addressing premature
convergence is critical for improving the optimiza-
tion process, guaranteeing a balanced E-E trade-off,
and generating optimal solutions that properly lever-
age both FA and SA characteristics.
Different methods have been developed to ad-
dress the early convergence challenge. A common
approach involves restarting the population upon de-
tecting early convergence. However, this method
has critical drawbacks. Firstly, regenerating the pop-
ulation will erode valuable search history, like the
gathered information about the most promising sub-
regions. Secondly, using this method leads to miss-
ing the created fitness landscape. Therefore, storing
crucial information before resetting the FA’s popula-
tion is recommended. An approach named ”Finder-
Tracker agents” is proposed in this study to assign dis-
tinct roles within the HdFA population to efficiently
counter the problem of early convergence with an ap-
proach of storing the valuable information of the best
members. Finder Tracker agents mechanism will di-
vide and label the particles of the applied HdFA into
two different types of particles with different tasks
if premature convergence happens. A portion of the
population is labelled as f inder, while another is la-
belled as a tracker. In this approach for each iteration,
the average Euclidean distance between particles lo-
cated in the n regions is calculated and compared to
a predefined threshold (τ). τ represents a threshold
value. The choice of τ is critical; it must be set ap-
propriately to balance the convergence speed against
the risk of missing the global optimum. Line 9 of
Algorithm 2, illustrates the mechanism by which the
algorithm detects premature convergence, by compar-
ing the average of calculated Euclidean distance to
a threshold τ, which it concludes early convergence
is happening. If convergence occurs and the conver-
gence condition is met, the particles that store the best
solutions will be labelled as trackers, and the rest la-
belled as finders. The tracker solutions will be saved,
and the rest of the solutions that are finders will be re-
generated. By making new finder solutions, the algo-
rithm can explore different regions and find a variety
of different solutions.
Algorithm 2: Finder-Tracker Agents Algorithm.
1: Initialize:
2: Set distance threshold τ,
3: HdFA Population = Particles
Finder
+ Particles
Tracker
,
4: Particles
Finder
≥ Particles
Tracker
.
5: Main Loop: m Iterations
6: Travers SA-BSP tee particle
1
to particle
i
located in same
region
∑
i
1
(Euclideandistance)
i
< τ
7: Flag convergence condition
8: Label HdFA particles with the best fitness values as tracker.
9: Label the remaining particle as f inder
10: Regenerate f inder particles.
11: end for
12: end for
13: end for
Figure 3 shows the E-E trade-off between HdFA
and SA from epoch 1 to 4 on the 2d Schaffer func-
tion. The blue Crosses are HdFA particles and SA
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
124
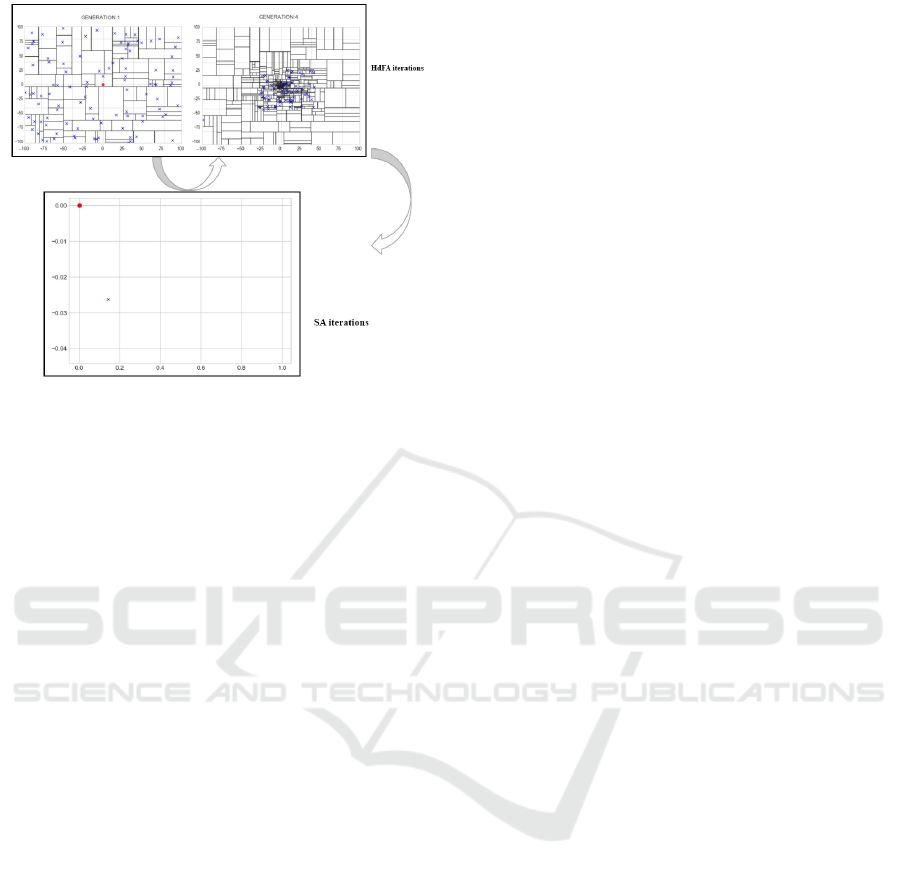
Figure 3: Switching from HdFA to SA for Schaffer func-
tion.
solution at the top and below figures, respectively,
and the red dot is the global optima. During the
exploration process, the HdFA algorithm could find
the best local value. Furthermore, using the BSP
tree memory mechanism, the valuable information
was saved and passed to the SA for the remainder
of the search process. After checking premature and
maturity conditions (controller unit in figure 1), the
search space limited from S= [x
1
,x
2
] ∈ [−100,100] ×
[−100,100] in exploration phase to sub-region h
i
=
[x
1
,x
2
] ∈ [−0.05,1.05]×[−0.044,0.002] for exploita-
tion phase. In this example, the number of solutions
of HdFA equals 100 (the blue crosses). Applying a
self-adaptive E-E trade-off based on history driven,
the algorithm will be successful in limiting the search
space S to the sub-region h
i
with the best chance of
finding the global optima solution. In other words,
sub-region h
i
is a leaf node of the SA-BSP tree with
the best fitness value.
4 EXPERIMENTATION
4.1 Experimentation Environment
To evaluate HdFA-SA, benchmark test functions from
(Alizadeh and Mouhoub, 2023) are employed that
list the continuous functions, their search ranges, and
global optima. Functions f
1
− f
3
are unimodal and
non-separable. f
4
− f
10
are multimodal functions, in
which f
4
− f
8
are non-separable while f
9
and f
10
are
separable. Experiments run on Python 3.7, an Intel
Core i7 CPU (2.00 GHz) and 16 GB RAM.
4.2 Comparison with Other
Nature-Inspired Techniques
Table 1 compares the performance of different
history-driven methods HdFA-SA and HdPSO-SA
with the traditional methods FA, GA, PSO, and SA
across ten different unimodal and multimodal test
functions f
1
− f
10
. The performance is measured in
terms of the ”Best” fitness value achieved by the al-
gorithms and the running time(s). The population size
for all the methods is equal to 100 and SA is equal to
1. For HdFA α = 0.2, γ = 1, and β
0
= 1 and for SA,
T = 100, k = 0.8, and c = 0.95. The other require-
ment parameters for HdFA-SA are Pop
test
= 300,
l >= 3, and n = 3. For the rest of the algorithms,
we tune the parameters to their best values. For PSO,
w = 0.9, c
1
= 2.05, and c
2
= 2.05, For GA, the muta-
tion probability is 0.05 and the crossover probability
is 0.95. For the HdPSO-SA and other measures refer
to (Alizadeh and Mouhoub, 2023).
As can be seen from table 1, two history-driven
approaches HdPSO-SA and HdFA-SA have better re-
sults not only in finding the global optima but also in
running time compared with the other algorithms that
shows the ability of SA-BSP tree in collaboration be-
tween metaheuristics and guiding the hybrid frame-
work to exploit the most promising subregion based
on fitness landscape approximation. PSO and SA can
find the global optima in only five and one bench-
mark problems, respectively. GA exclusively finds
the global optimum for the function f
3
. FA exhibits
a competitive performance in locating the global op-
tima, though with a longer computational time than
HdFA-SA and HdPSO-SA are needed. HdFA-SA
could address the most complex functions with many
local optima like Michalewicz2 ( f
10
), and Schaffer
( f
4
) functions with the ”Finder − Tracker agents” al-
gorithm to deal with premature convergence to find
the global optima in lower time compared with FA.
Table 1 illustrates that HdPSO-SA successfully lo-
cated the global optimum for the Easom function ( f
2
),
a feat not achieved by either HdFA-SA or FA. Further-
more, while FA successfully located the global op-
tima for all benchmark functions except for f
2
, HdFA-
SA achieved these results more efficiently, in terms
of computational time. This improvement was made
possible by employing the fitness landscape approx-
imation strategy introduced in this study, which en-
hanced the search efficiency across all tested func-
tions, excluding f
2
.
Enhancing Continuous Optimization with a Hybrid History-Driven Firefly and Simulated Annealing Approach
125
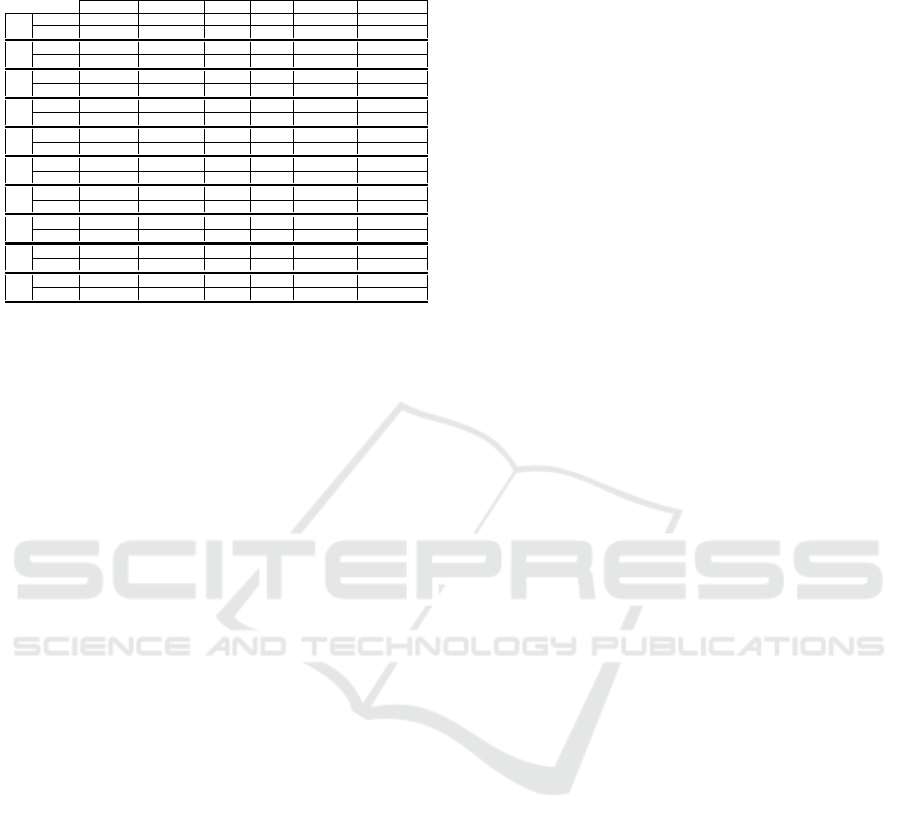
Table 1: HdFA-SA comparison with HdPSO-SA, FA, GA,
PSO, and SA with the running time(s) of algorithms.
HdFA-SA HdPSO-SA FA GA PSO SA
f
1
Best 0 0 0 0.75 0 9.3593E-07
Time(s) 0.62 0.75 32.16 2.31 0.90 0.03
f
2
Best -0.999 -1 -0.9997 0 0.9999 0
Time(s) 10 0.75 17.61 17.96 1.11 0.007
f
3
Best 0 0 0 0.01 0 22.65
Time(s) 0.28 0.43 8.46 9.6 0.78 0.008
f
4
Best 0 0 0 0.03 0 0.3854
Time(s) 0.21 0.72 158.8 2.64 1.03 0.007
f
5
Best -1.0316 -1.0316 -1.0316 0.07 -1.0316 -1.0316
Time(s) 0.46 0.41 0.94 2.36 0.79 0.42
f
6
Best 0 0 0 0.03 2.16 3510.20512
Time(s) 0.76 0.65 41.66 2.35 2.1697E-07 0.007
f
7
Best 0 0 0 0.03 3.5393E-05 12860.23353
Time(s) 0.72 0.44 25.55 2.38 1.25 0.007
f
8
Best -186.73 -186.73 -186.73 0.0004 -177.6542 -8.5682
Time(s) 4.68 1.09 70.91 2.35 5.38 0.008
f
9
Best 0 0 0 0.05 0 7652.4848
Time(s) 0.9 0.64 17.46 2.39 2.09 0.008
f
10
Best -1.8013 -1.8013 -1.8013 0.0004 -1.8012 -1.8012
Time(s) 0.7 1.1 2.7 2.38 1.88 0.19
5 CONCLUSIONS
We propose a cooperative hybrid approach based on
a history-driven method, namely HdFA-SA, for cre-
ating feature landscapes and efficiently finding the
global optima in continuous optimization problems.
A self-adaptive BSP tree is used to store valuable in-
formation about the search space to create the land-
scape of approximated fitness values and to partition
the search space accordingly during the exploration
phase. HdFA and SA are implemented for explo-
ration and exploitation, respectively. Since early con-
vergence leads to a deep SA-BSP tree and an inaccu-
rate fitness landscape, the HdFA is equipped with a
”Finder − Tracker agents” approach in its controller
unit compared with the previous study (HdPSO-SA)
to identify and deal with this challenge. Finally,
a smart controlling mechanism is implemented in
HdFA-SA for determining the best time (iteration) for
switching from HdFA to SA (following the E-E trade-
off) to take advantage of the strengths of both algo-
rithms. Besides, to decrease the running time in ex-
ploitation steps, the search space is limited to only the
most promising subregion. The ”Finder − Tracker
agents” approach is proposed to maintain population
diversity in the face of early convergence while the
gathered valuable data during the exploration itera-
tions will be stored. We evaluate the proposed method
on 10 unimodal and multimodal continuous bench-
marks and compare the results with state-of-the-art
metaheuristics. The results make it clear that for nine
out of the benchmarks, HdFA-SA located the global
optima faster than the traditional methods. The com-
parison illustrates both hybrid methods HdPSO-SA
and HdFA-SA could find the global optima in 10 and
9 continuous benchmarks, respectively with less run-
ning time compared with the other methods. Fitness
landscape approximation is an aspect of the research
that has a crucial role in decreasing the running time
of both hybrid approaches HdFA-SA and HdPSO-SA.
REFERENCES
Alizadeh, S. and Mouhoub, M. (2023). A new self-adaptive
hybrid approach based on history-driven methods for
improving metaheuristics. In Proceedings of the IEEE
2023 International Conference on Machine Learning
and Applications (ICMLA 2023), Jacksonville, FL,
USA, December 15-17, 2023, pages 762–7670. IEEE.
Bidar, M. and Mouhoub, M. (2022). Nature-inspired tech-
niques for dynamic constraint satisfaction problems.
Operations Research Forum, 3(2):1–33.
Blum, C. and Roli, A. (2008). Hybrid metaheuristics: an
introduction. In Hybrid metaheuristics, pages 1–30.
Springer.
Chelouah, R. and Siarry, P. (2000). A continuous genetic al-
gorithm designed for the global optimization of multi-
modal functions. Journal of Heuristics, 6(2):191–213.
Chelouah, R. and Siarry, P. (2003). Genetic and nelder–
mead algorithms hybridized for a more accurate
global optimization of continuous multiminima func-
tions. European Journal of operational research,
148(2):335–348.
Dorigo, M., Birattari, M., and Stutzle, T. (2006). Ant colony
optimization. IEEE computational intelligence maga-
zine, 1(4):28–39.
Farnad, B., Jafarian, A., and Baleanu, D. (2018). A new hy-
brid algorithm for continuous optimization problem.
Applied Mathematical Modelling, 55:652–673.
Ghodrati, A. and Lotfi, S. (2012). A hybrid cs/pso algorithm
for global optimization. In Intelligent Information
and Database Systems: 4th Asian Conference, ACI-
IDS 2012, Kaohsiung, Taiwan, March 19-21, 2012,
Proceedings, Part III 4, pages 89–98. Springer.
Hmer, A. and Mouhoub, M. (2016). A multi-phase hybrid
metaheuristics approach for the exam timetabling. In-
ternational Journal of Computational Intelligence and
Applications, 15(04):1–22.
Holland, J. H. (1992). Genetic algorithms. Scientific amer-
ican, 267(1):66–73.
Jafarian, A., Measoomy, S., Golmankhaneh, A. K., and
Baleanu, D. (2014). A numerical solution of the
urysohn-type fredholm integral equations. Rom. J.
Phys, 59(7-8):625–635.
Kao, Y.-T. and Zahara, E. (2008). A hybrid genetic algo-
rithm and particle swarm optimization for multimodal
functions. Applied soft computing, 8(2):849–857.
Kennedy, J. and Eberhart, R. (1995). Particle swarm opti-
mization. In Proceedings of ICNN’95-international
conference on neural networks, volume 4, pages
1942–1948. IEEE.
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
126

Khan, W. A., Hamadneh, N. N., Tilahun, S. L., and Ng-
notchouye, J. (2016). A review and comparative
study of firefly algorithm and its modified versions.
Optimization Algorithms-Methods and Applications,
45:281–313.
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Kıran, M. S., G
¨
und
¨
uz, M., and Baykan,
¨
O. K. (2012).
A novel hybrid algorithm based on particle swarm
and ant colony optimization for finding the global
minimum. Applied Mathematics and Computation,
219(4):1515–1521.
Kirkpatrick, S., Gelatt Jr, C. D., and Vecchi, M. P.
(1983). Optimization by simulated annealing. science,
220(4598):671–680.
Korani, W. and Mouhoub, M. (2021). Review on nature-
inspired algorithms. In Operations research forum,
volume 2, pages 1–26. Springer.
Lourenc¸o, H. R., Martin, O. C., and St
¨
utzle, T. (2003). It-
erated local search. In Handbook of metaheuristics,
pages 320–353. Springer.
Mahmoodabadi, M. J., Mottaghi, Z. S., and Bagheri, A.
(2014). Hepso: high exploration particle swarm op-
timization. Information Sciences, 273:101–111.
Mladenovi
´
c, N. and Hansen, P. (1997). Variable neigh-
borhood search. Computers & operations research,
24(11):1097–1100.
Nguyen, T. T., Li, Z., Zhang, S., and Truong, T. K.
(2014). A hybrid algorithm based on particle swarm
and chemical reaction optimization. Expert systems
with applications, 41(5):2134–2143.
Rere, L. R., Fanany, M. I., and Arymurthy, A. M. (2015).
Simulated annealing algorithm for deep learning. Pro-
cedia Computer Science, 72:137–144.
Schwarzkopf, M., Konwinski, A., Abd-El-Malek, M., and
Wilkes, J. (2013). Omega: flexible, scalable sched-
ulers for large compute clusters. In Proceedings of the
8th ACM European Conference on Computer Systems,
pages 351–364.
Shao, Z., Yang, J., Shen, C., and Ren, S. (2022). Learning
for robust combinatorial optimization: Algorithm and
application. In IEEE INFOCOM 2022-IEEE Confer-
ence on Computer Communications, pages 930–939.
IEEE.
Talbi, E.-G. (2009). Metaheuristics: from design to imple-
mentation, volume 74. John Wiley & Sons.
Wolpert, D. H. and Macready, W. G. (1997). No free lunch
theorems for optimization. IEEE transactions on evo-
lutionary computation, 1(1):67–82.
Yang, X.-S. (2009). Firefly algorithms for multimodal op-
timization. In International symposium on stochastic
algorithms, pages 169–178. Springer.
Yuen, S. Y. and Chow, C. K. (2008). A genetic algorithm
that adaptively mutates and never revisits. IEEE trans-
actions on evolutionary computation, 13(2):454–472.
Zaharia, M., Chowdhury, M., Das, T., Dave, A., Ma, J.,
McCauly, M., Franklin, M. J., Shenker, S., and Sto-
ica, I. (2012). Resilient distributed datasets: A {Fault-
Tolerant} abstraction for {In-Memory} cluster com-
puting. In 9th USENIX Symposium on Networked
Systems Design and Implementation (NSDI 12), pages
15–28.
Zhang, L., Liu, L., Yang, X.-S., and Dai, Y. (2016). A novel
hybrid firefly algorithm for global optimization. PloS
one, 11(9):e0163230.
Enhancing Continuous Optimization with a Hybrid History-Driven Firefly and Simulated Annealing Approach
127
