
Intelligent Sampling System for Connected Vehicle Big Data
Omar Makke
1 a
, Syam Chand
2 b
, Vamsee Krishna Batchu
2 c
, Oleg Gusikhin
1 d
and Vicky Svidenko
1 e
1
Ford Motor Company, U.S.A.
2
Ford Motor Company, India
Keywords:
Connected Vehicles, Sampling, Big Data, Large Language Model Application, Generative AI.
Abstract:
The impact of connected vehicle big data on the automotive industry is significant. Big data offers data scien-
tists the opportunity to explore and analyze vehicle features and their usage thoroughly to assist in optimizing
existing designs or offer new features. However, the downside of big data is its associated cost. While storage
tends to be cheap, data transmission and computational resources are not. Specifically, for connected vehicle
data, even when unstructured data is excluded, the data size can still increase by several terabytes a day if
one is not careful about what data to collect. Therefore, it is advisable to apply methods which help avoiding
collecting redundant data to reduce the computation cost. Furthermore, some data scientists may be tempted
to calculate “exact” metrics when the data is available, partly because applying statistical methods can be
tedious, which can exhaust the computational resources. In this paper we argue that intelligent sampling sys-
tems which centralize the sampling methods and domain knowledge are required for connected vehicle big
data. We also present our system which assists interested parties in performing analytics and provide two case
studies to demonstrate the benefits of the system.
1 INTRODUCTION
As connected vehicles become more mainstream, the
demand for acquiring and accessing connected vehi-
cle data has been increasing. Even though a vehi-
cle equipped with few cameras has the potential to
generate terabytes of data each day, as of today, only
few megabytes of structured data are sent over the air
to the cloud due to the relatively large cost of data
transmission. Larger volumes of data are usually sent
over WIFI if the vehicle is configured to connect to
the owner’s network, which is usually not the case.
Nevertheless, with millions of vehicles present on the
road, and due to the increment of connected vehicle
features, the data size will grow at a minimum of
polynomial rate, as will be shown later. With this data
growth, reliance on sampling techniques will become
important to efficiently build models. More discus-
sion on the role of sampling in big data can be found
in (Albattah, 2016).
a
https://orcid.org/0000-0002-7295-751X
b
https://orcid.org/0009-0003-0195-3807
c
https://orcid.org/0009-0008-9825-8339
d
https://orcid.org/0000-0001-6943-4227
e
https://orcid.org/0009-0009-9458-1507
In general, obtaining data from a vehicle has the
following challenges. Transmission cost, bandwidth
limitations, storage, computational costs, and admin-
istrative costs such as adhering to regulations, man-
aging access, etc. Using today’s technologies, engi-
neers can put data request orders to specify the signals
that must be collected (Rocci et al., 2021). In many
cases, different requests can specify common signals
and thus creating data duplication in the cloud. Fur-
thermore, the data request owners may not be aware
of additional related signals which may be of inter-
est. Vehicle signal specification standard (COVESA,
2024) attempts to mitigate this problem and provide
a common language for signals. While this covers
the “common” signals used, each Original Equipment
Manufacturer (OEM) has plethora of other architec-
ture specific signals. Different vehicle types can have
different vehicle architectures, and for the same vehi-
cle type, its architecture can vary among model years.
Therefore, identifying which signals are needed for
a representative study is not trivial since the signals
can vary between model years and can vary between
vehicles having the same model year.
Another challenge arises in determining how
much data to collect and from how many vehicles.
150
Makke, O., Chand, S., Batchu, V., Gusikhin, O. and Svidenko, V.
Intelligent Sampling System for Connected Vehicle Big Data.
DOI: 10.5220/0012813500003756
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 13th International Conference on Data Science, Technology and Applications (DATA 2024), pages 150-158
ISBN: 978-989-758-707-8; ISSN: 2184-285X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

Engineers and data scientists are tempted to collect
“as much data as possible” which can be costly, or for
simplicity, they may sample from arbitrarily selected
vehicles. They usually do not have all the knowledge
about the general demographics, geographical simi-
larities, vehicle configurations, etc. as these change
over time. Therefore, it is important to have a cen-
tralized system which assists in collecting the proper
amount data from the required signals sampled cor-
rectly. Otherwise, studies or machine learning mod-
els can be biased and under-perform, as can be shown
in (Hasanin et al., 2019) and (Johnson and Khoshgof-
taar, 2020).
To solve this problem, we developed an intelli-
gent sampling system for connected vehicle feature
analytics which combines connected vehicles domain
knowledge and analytical results with data sampling
techniques, while balancing the budget with the de-
sired statistical significance whenever possible. It as-
sists the users in determining which signals to use,
sampling technique, and in choosing a sample suit-
able for their studies while meeting their budget con-
straints.
This paper is organized as follows. Section 2 de-
scribes common technologies used in vehicles, and
motivates the need for an intelligent sampling sys-
tem. Section 3 describes our system architecture and
components. Section 4 demonstrates using the sys-
tem for analyzing feature usage on different types of
roads. Section 5 describes a case which models fuel
consumption as a function of tire pressure. Section 6
concludes the paper.
2 BACKGROUND
Big data challenges related to our work have been
known for several years, even before cloud solutions
became powerful. As computational power improved,
data collection also increased, and therefore, these
challenges remain. An obvious approach to deal with
the computational burden created by big data is sam-
pling. What is not obvious is how to perform the
sampling. For example, in (Casamayor-Pujol et al.,
2023), the authors designed a scalable “Intelligent
Sampling” method to assist in scheduling workloads
in large scale heterogeneous computing continuum.
This, of course, is abstracted from the end users who
are interested in building models, which serves as a
suitable example of an intelligent sampling system.
A comprehensive list of sampling techniques is found
in (Djouzi et al., 2023). Some of these methods are
very well known. We review some of the fairly re-
cent methods in adaptive sampling. In (John and
Langley, 1996), the authors introduced a progressive
sampling method and the concept of “Probably Close
Enough” (PCE). The idea behind PCE is to obtain a
good enough sample such that it is very unlikely to
improve a mining algorithm any further by using the
entire dataset. The authors discussed static versus dy-
namic sampling and their work aims to deal with big
data efficiently. In (Satyanarayana, 2014), the authors
proposed Generalized Dynamic Adaptive Sampling
(GDAS), an adaptive sampling technique to tackle
the limitations in progressive sampling, listed in their
work. In (Djouzi et al., 2022), the authors proposed
a new adaptive sampling method, Subsampled Dou-
ble Bootstrap GDAS (SDBGDAS) method, which is
an improvement over GDAS (Satyanarayana, 2014)
method, which allows the scaling of adaptive methods
to big data. In (Loyola R et al., 2016), various sam-
pling methods are discussed and the authors propose
a Smart Sampling and Incremental Function Learning
Algorithm to find a Probably Approximately Correct
Computation (PACC) regression model.
Other work, such as in (Zhang and Wang, 2021),
(Ai et al., 2021), investigated methods to deal with
distributed and massive data. The idea is to opti-
mally select a distributed sub-data, for which sum-
mary statistics are calculated on the edge and sent to
a central server or to build generalized linear models
(GLM). Fuzzy methods are also proposed to reduce
sample size such as in (He et al., 2015).
Whether simple random sampling techniques are
used, or advanced methods, it is clear that challenges
arise when dealing with big data, and good sampling
techniques help address these challenges. As noted
earlier, the data size of connected vehicle data in
the cloud grows at least polynomially (ignoring any
changes in regulations, consent agreements, etc.). A
proof is offered here before proceeding to the next
section.
2.1 Polynomial Growth of Connected
Vehicle Data
To motivate the need for intelligent sampling systems,
we first show that the data will grow at polynomial
rate during the next few years. Let S
y
be the number
of connected vehicles sold in year y, and assume that
y
1
< y
2
=⇒ |S
y
1
| < |S
y
2
|. In other words, the sales of
connected vehicles each year are more than the pre-
vious year (unsaturated market). Note that we only
consider connected vehicles. Therefore, the assump-
tion |S
y
1
| <= |S
y
2
| holds until almost all vehicles on
the road are connected vehicles. Let d
i
be the amount
of data collected from model year y
i
. Assuming d
i
is proportional to S
y
i
, we have y
1
< y
2
=⇒ d
1
< d
2
,
Intelligent Sampling System for Connected Vehicle Big Data
151

meaning, each new year we collect more data than
the previous year. Under these assumptions, we now
prove that the data size grows at least polynomially
with the years.
Let I be an enumeration set of all years under
which the assumptions hold. Let ∆
i
= d
i
− d
i−1
, the
increment of collected data for year y
i
, i ∈ I. For all
the years, while the market is not saturated with con-
nected vehicles, there exists a year for which the in-
crement in data collection ∆
min
is minimal.
Then
∑
i∈I
d
i
= d
1
+ d
2
+ d
3
+ ... (1)
∑
i∈I
d
i
= d
1
+ d
1
+ ∆
2
+ d
2
+ ∆
3
+ d
3
+ ∆
4
+ ... (2)
(3)
But
d
i+1
> d
i
+ ∆
min
> d
i−1
+ 2∆
min
(4)
Therefore
∑
i∈I
d
i
≥ d
1
+ d
1
+ ∆
min
+ d
1
+ 2∆
min
+ d
1
+ 3∆
min
...
(5)
∑
i∈I
d
i
≥ |I|d
1
+
∑
i∈I
i∆
min
(6)
Letting N = |I|, the number of included years, then the
partial increment of data ∆(N) at year N from year y
1
is
∆(n) =
N
∑
n=1
n∆
min
(7)
∆(n) = ∆
min
N(N + 1)
2
(8)
Hence, the data size grows with the years, following
at least a polynomial of order 2. □
Therefore, it is important to build a system which
efficiently selects a representative samples to han-
dle the large amount of actual and expected data.
For example, the systems described in (Makke and
Gusikhin, 2018) and (Tran et al., 2024) will require
less data to build the desired models and to update
them on a regular basis, which makes the cost of
“live” services feasible.
3 SYSTEM DESCRIPTION
To address the issues listed above we propose a sys-
tem which assists in performing “Connected Vehicle
Feature Analytics” defined below, by combining sam-
pling techniques with domain knowledge retrieval,
while simultaneously considering any known system
or budget constraint.
Definition 3.1. Connected Vehicle Feature Analytics
(CVFA) refers to the analysis of the performance and
usage of the vehicle features within the vehicle pop-
ulation. The objective is to generate actionable in-
sights for engineering, marketing and product devel-
opment, leveraging connected vehicle technology, do-
main knowledge, and data science.
Signals Lab Reports
Spec
Signal
Recommender
(LLM)
Cost Es�mator
Constraints
Historical Orders
Wish List
Minimum Signals
Required
Jus�fica�on For Data Collec�on
(Natural Language)
List of model specific signal names to sample
Budget
Figure 1: Architecture of Signal Recommender.
In comparison to “connected services”, features such
as remote start from mobile phone and prognostics,
which are tailored to individual vehicles, are not
CVFA since CVFA focuses on the broader trends.
The proposed system is divided into two main
components. The first is the Signal Recommender
component which focuses on assisting the users with
choosing the correct signals for their studies while
adhering to any system or business constraints. The
second is the Intelligent Data Collection component
which, once signals are known, assists the users in
sampling the data sources using one of the many sam-
pling techniques. These components are discussed in
details below.
3.1 Signal Recommender
The architecture for the Signal Recommender is
shown in Figure 1. The user starts by describing the
use case using natural language. This step is required
before the data collection is approved to ensure that
privacy rules and regulations are met, and that the pro-
posed use case fits within the driver’s consent agree-
ment. The user of the system also selects the sig-
nals of interest by their “standard” name such as VSS
(COVESA, 2024). This is important because the ac-
tual signal names can change based on the vehicle ar-
chitecture. For example, an 8 bits temperature signal
on CAN bus may have a suffix of “ 8”, but on vehicles
with Automotive Ethernet (IEEE Standards Associa-
DATA 2024 - 13th International Conference on Data Science, Technology and Applications
152
tion, 2015), it may be 16 bits. The user may not know
which model year this change took effect. The user
also specifies a budget which can be approximated as
dollars per megabytes of data.
This information, along with vehicle specification
documents, network signal specifications, relevant lab
reports, and historical data collection orders are fed
into a signal recommender. This can be either a classi-
cal recommender based on knowledge databases such
as vehicle ontology, or it can be implemented with the
assistance of a Large Language Model (LLM) (Ope-
nAI, 2023), (Google, 2023). We find that an LLM
can easily recommend possible relevant signals when
such information is provided. The LLM has the ad-
vantage of being able to read the use case justifi-
cation to understand the issue and match that with
other documents using Retrieval Augmented Gener-
ation (RAG) techniques to identify other possible sig-
nals.
The cost estimator looks up the type of signal
and its specification and provides a cost estimate for
adding that signal to the study. For example, a Door
Switch signal is an event driven signal where as a
transmission output speed is an analog signal that can
be collected at around 10Hz. Ambient temperature is
available at 1Hz but the signal does not have to be col-
lected at that rate unless a specific study related to the
performance of the sensor is required.
The constraints block imposes any constraints on
the system, such as no more than 10 Mb can be trans-
ferred from vehicles with 3G connection, and no more
than 50 Mb can be transferred from vehicles with 4G
connections. This is important because at any point
in time, there are vehicles of different ages and tech-
nologies on the road. Usually, it suffices to choose a
specific model year for the study, but in some cases
a study can span different model years such as when
investigating tire pressure, general vehicle usage, etc.
The output of this component is a list of signals
to sample along with the desired sample rate, and this
list is an input to the next component.
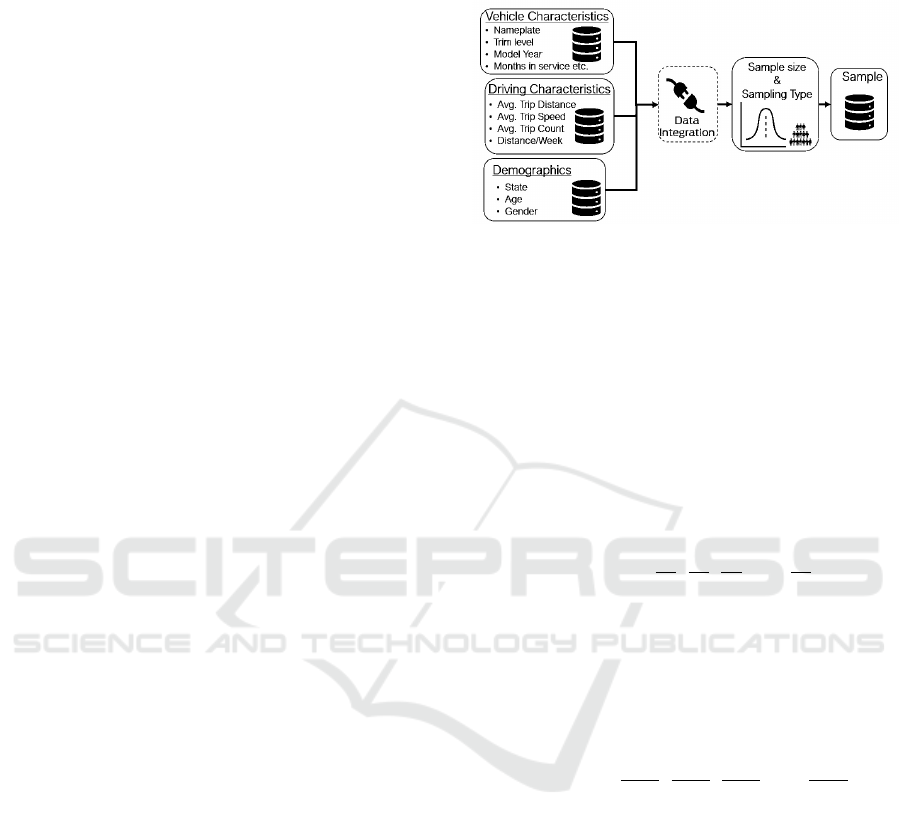
3.2 Signal Sampling and Collection
The Signal Sampling and Collection component com-
prehensively analyze driving characteristics, vehicle
attributes, and demographic data to determine the ap-
propriate sampling size and type, as shown in Figure
2. More dimensions are available and additional ones
can be added over time, such as the study shown in
Section 4. The selection of these set of factors is en-
tirely dependent on the objective of data collection.
By integrating these key factors, the system aims to
generate a sample that is not only statistically signifi-
cant in size but also representative of the wider popu-
lation.
Figure 2: Architecture of Signal Sampling and Collection.
3.3 Sample Size
In the case of connected vehicles it’s nearly impos-
sible to collect data from all the vehicles and hence
the population size is unknown. There are difference
approaches to estimate the sample size based on the
distribution of selected continuous and discrete sam-
pling parameters. For continuous sampling parame-
ters like average trip distance and given the popula-
tion is unknown, the sample size is estimated (Nan-
jundeswaraswamy and Divakara, 2021) by,
n
c
= Z
2
max
σ
2
1
e
2
1
,
σ
2
2
e
2
2
,
σ
2
3
e
2
3
........
σ
2
n
e
2
n
Z: Z – statistic value for the required confidence level
σ
2
: Variability of the sampling parameter
e: Maximum allowable error
For discrete sampling parameters like model year
of vehicle and given the population is unknown, the
sample size is estimated (Louangrath, 2019) by,
n
d
= Z
2
max
p
2
1
q
2
1
e
2
1
,
p
2
2
q
2
2
e
2
2
,
p
2
3
q
2
3
e
2
3
........
p
2
n
q
2
n
e
2
n
Z: Z – statistic value for the required confidence level
p: Proportion of the class in the sampling variable
q = (1-p)
e: Maximum allowable error.
The overall sample size for the study with a com-
bination of continuous and discrete sampling parame-
ters has been chosen as the maximum of the estimated
individual sample sizes.
n
o
= max(n
c
, n
d
)
n
c
: minimum sample size required to account for the
variability in continuous sampling attributes.
n
d
: minimum sample size required to account for the
variability in discrete sampling attributes
Thus, the maximum allowable error and confi-
dence level can be traded off with the available budget
before data is collected.
Intelligent Sampling System for Connected Vehicle Big Data
153

3.4 Sampling Type
Figure 3: Stratified Random Sampling.
Selecting a sample that represents the population is
as important as collecting data from statistically sig-
nificant sample size. Once the sample size is esti-
mated, it is important to identify a set of vehicles that
represent the distribution of the targeted population,
and the sampling methodology depending on objec-
tive of the study (Elfil and Negida, 2016). We find
that ’Stratified Random Sampling’ method is effec-
tive as it balances the complexity of sampling with
the intended use of data, since in most cases all sub-
jects in the targeted population have equal chances to
be selected. Otherwise, we choose non-probabilistic
sampling - “Judgmental Sampling”.
Stratified sampling is a probabilistic sampling
method which is based on dividing a population into
strata of homogeneous members, and members of the
sample are selected randomly from these strata. For
example, if we want to collect data to study usage of
washer fluid, it is important to select driving charac-
teristics that have high correlation with washer fluid
usage like average trip speed, average trip duration
and state in which vehicle is being driven. The en-
tire population is divided into homogeneous strata and
samples would be picked from each strata propor-
tionately as shown in Figure 3. Population(N)=1500,
Sample Size (n) = 300, and Strata Multiplier = 0.2
(
n
N
).
This methodology would ensure that data is repre-
senting the population and sample size is statistically
significant.
As more strata are discovered, their descriptions
and sample sizes are added to our system, exposed
to the LLM, thus allowing future users to select from
these strata, and thus allowing the system capability
to naturally grow with time.
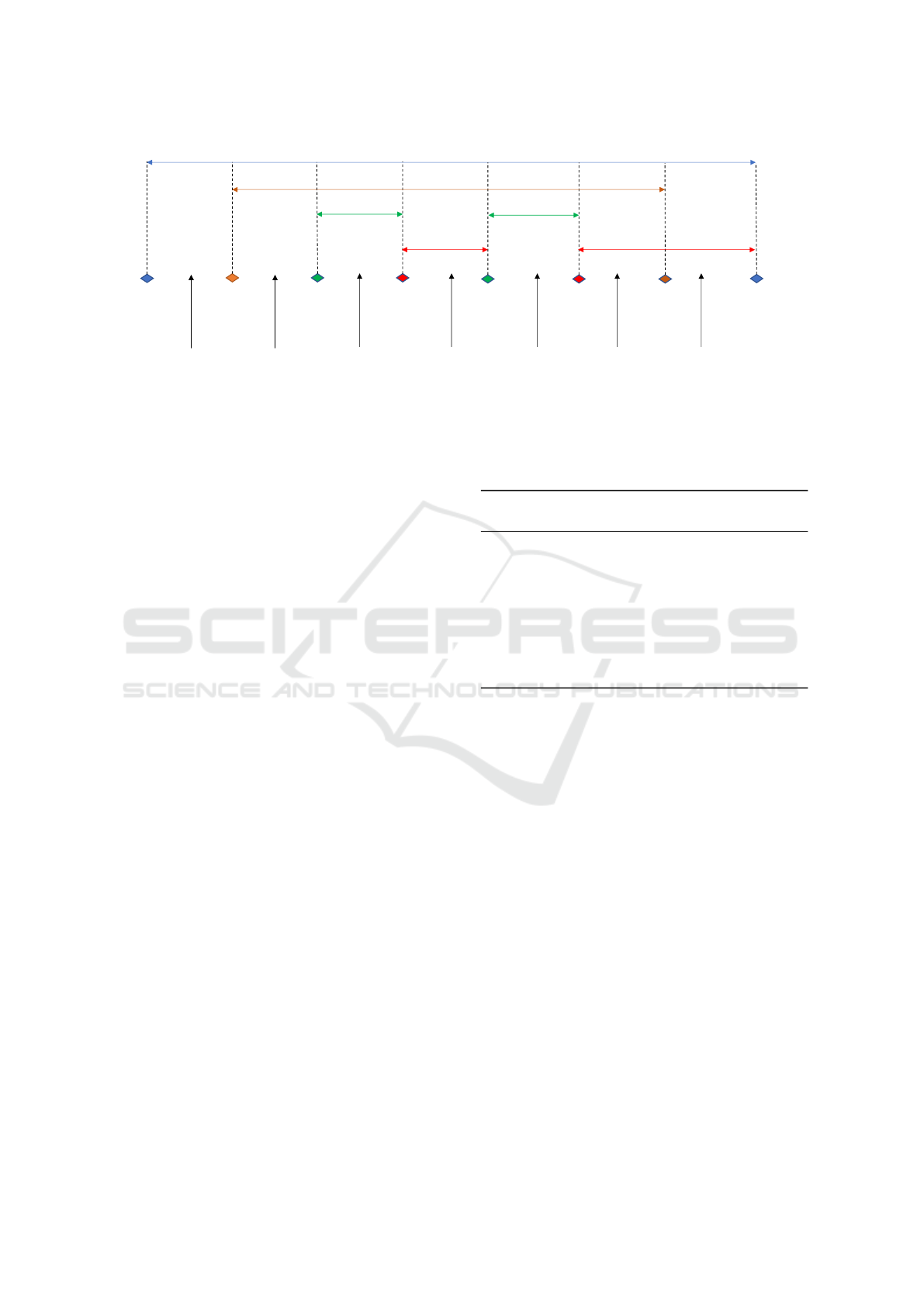
3.5 Logical Grouping of Events
In addition to sampling data from the vehicles, the
system is setup to sample from existing connected ve-
hicle data. Millions of vehicles on the road sending
at least a Megabyte of data a week raises challenges
in managing the collected data. Even if querying the
entire data set is possible, that can be very expen-
sive. Therefore, it is important to store the data in a
form that can be sampled correctly based on different
needs. Logically, the data is partitioned using event
Ids as shown in Figure 4. When the controller send-
ing the data boots up, it generates a unique identifica-
tion number by hashing its VIN and a randomly gen-
erated number. Figure 4 shows an example of these
events, some of which are disjointed such as “Drive
Mode” and “Park mode”, and some of which are hi-
erarchical such as “Ignition Id” and “Drive Cycle Id”.
Then, as an example, suppose there is also an “Abs
Id”, an event indicating an anti-lock braking system
actuation event. The sampling can be limited to grab
data from all data which have “Ignition Id” that has at
least 1 “Abs Id” event. Furthermore, the sampling can
be performed so that (1) Either data is sampled ran-
domly from the set of all data which has in its “Igni-
tion Id” event at least one “Abs Id” event, (2) or sam-
ple a small subset of “Ignition Id” events which have
at least one “Abs Id” event, and then for each sam-
ple “Ignition Id”, grab all its data. This is important
if the data leading to an event is important, and must
be complete. Note that the LLM plays an important
role here if the users of the system do not know the
details on when the signal is available. For example,
it may be trivial that cruise control is only available
when “Drive Cycle Id” is present, but the user of the
system may not know that there is a “Drive Cycle Id”
for use, especially when there are many other event
identification numbers present. The specification of
the tagging system are fed into the LLM which then
recommends to the users to limit the sampling to the
events tagged with “Drive Cycle Id”. In addition to
the case studies that will be discussed in this paper,
other examples which use this system can be found in
(Beyel et al., 2024) and (Beyel. et al., 2023).
4 CASE STUDY 1: GEO-SPECIAL
FEATURE USAGE
Consider the following scenario. An OEM needs to
conduct a study on how a specific feature is used on
different roads. In order to do that, the OEM must an-
alyze how many kilometers a vehicle spends on dif-
ferent types of roads. Here, the type of roads are
as defined by Open Street Map (OSM) (Open Street
Map, 2024). Suppose also that the data is already
collected at a rate of 1 sample every 30 seconds (a
constraint) as described in the previous section. To
determine how man kilometers on average vehicles
drive on each type of road, GPS coordinates, vehicle
speed and vehicle type are needed. Then, for every
30 seconds, and a speed sample v
i
we estimate total
kilometers driven to be
DATA 2024 - 13th International Conference on Data Science, Technology and Applications
154
Igni�on
On
Controller
Wakes up
Drive Mode
Begins
Drive
Mode
Ends
Igni�on
Off
Drive Mode
Begins
Drive
Mode
Ends
Controller
Sleeps
Boot ID
Igni�on ID
Drive Cycle ID
Park ID
Stop ID
Drive Cycle ID
Messages
contain
Boot id
Messages
contain:
Boot ID
Igni�on ID
Messages
contain:
Boot ID
Igni�on ID
Drive Mode ID
Messages
contain:
Boot ID
Igni�on ID
Park Cycle ID
Messages
contain:
Boot ID
Igni�on ID
Stop Cycle ID
Messages
contain:
Boot ID
Stop Cycle ID
Messages
contain:
Boot ID
Igni�on ID
Drive Cycle ID
Figure 4: Data is tagged with various event identification numbers to make sampling more efficient.
Km
total
=
∑
i
v
i
× 0.0083h (9)
Equation (9) works as long as all the samples i ∈ I
are chosen, where I is the set of all measurements
of vehicle speed. However, millions of data points
can exist at every 30 seconds interval, and perform-
ing Geo-special queries to map each GPS recording
to the nearest road type is computationally expensive.
Therefore, sampling is required.
Remark: Note that the experiments conducted can be
repeated for each Strata (vehicle type). The results
shown here, however, are for the entire dataset for
confidentiality reasons.
To demonstrate the effectiveness of sampling con-
necting vehicle data, two experiments are performed.
In the first experiment, 0.01% of the data over a year
(3 Million points), and in the other, around 0.00005%
of the data over year (around 10k data points). Boot-
strap method is used, and each experiment is repeated
32 times, and the mean and standard deviation are av-
eraged over the 32 trials.
Table 1 shows the distribution of kilometers driven
per Open Street Map road type. The road type is cho-
sen to be the closest match on OSM within 100 me-
ters to the logged GPS coordinates. Table 2 shows
that when 3 million samples where used, the stan-
dard deviation was every small. When the sample size
is reduced to 10k, the standard deviation increased.
However, as shown in Table 3, the percentage change
between using 3 million samples and 10k samples is
negligible. It is worth noting that the query duration
dropped from around 2 hours to around 5 minutes.
In this case study, the signals were trivial to iden-
tify, and the study was straight forward. The compo-
nent shown in Figure 2 is still used, except the sam-
pling is performed on already existing data.
Remark: Running the query on the entire data set
Table 1: Mean % of the trials measuring kilometers driven
on different road types using different sample sizes.
Road Type % (3M Samples) % (10k Samples)
Motorway 23.92 24.1
MW Junction 3.97 3.88
MW Link 10.75 11.1
Trunk 5.3 5.05
Trunk Link 0.92 0.85
Primary 9.71 9.83
Secondary 10.34 10.18
Tertiary 9.69 9.9
Others 25.38 25.11
would time out after 2 hours, and it was not possi-
ble to obtain the metrics from the entire data set. The
larger set (3 million samples) was heuristically setup
so that the query finishes in approximately 2 hours
before the query terminates.
5 CASE STUDY 2: IMPACT OF
TIRE PRESSURE ON FUEL
ECONOMY
In this study, we are interested to find the relation
between tire pressure and fuel economy. Using the
LLM, we find that tire pressure signals and fuel econ-
omy signals are common across wide range of vehi-
cle older vehicle and all recent vehicles. Furthermore,
from the CAN Database, the LLM identified that not
all the signals have the same unit (depending on the
architecture and the country). The data size is in the
order of tens of terabytes. Although this is not a prob-
lem at all for Big-Query, an organization may throttle
the consumption of computational resources per user
Intelligent Sampling System for Connected Vehicle Big Data
155
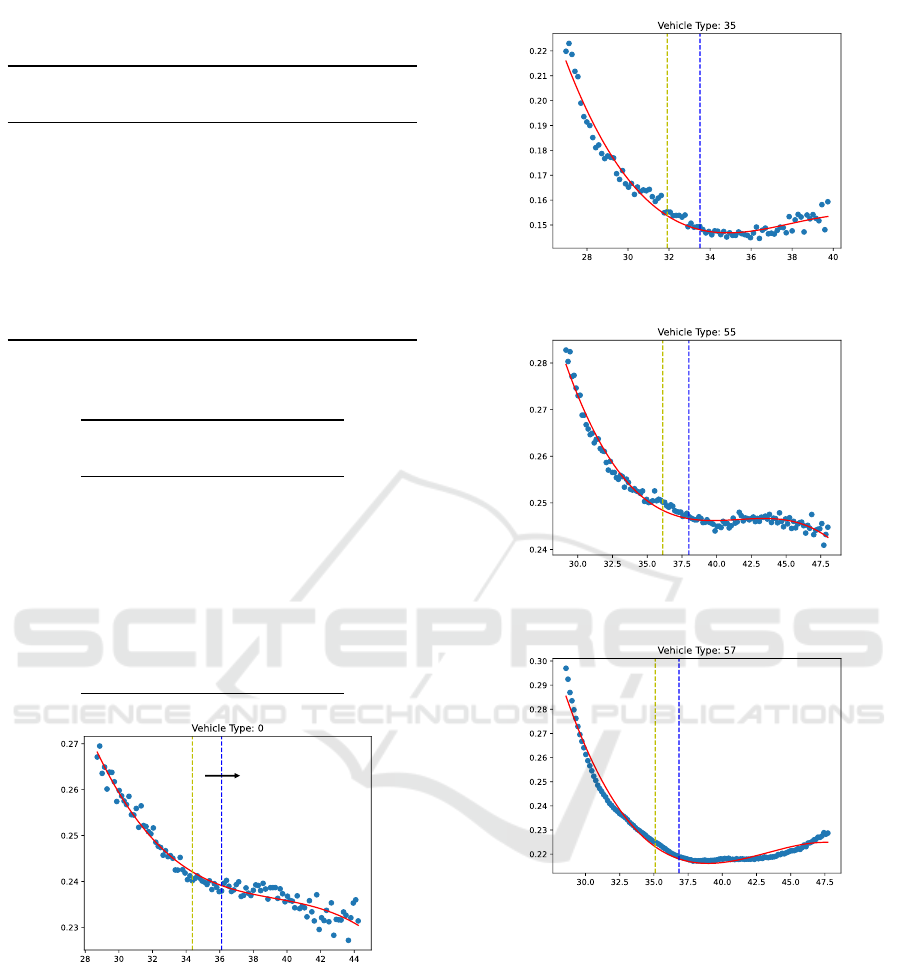
Table 2: Standard deviation of the trials shown in Table 1.
Smaller data sets are still accurate.
Road Type (3M Samples) (10k Samples)
Motorway 0.02 2.37
MW Junction 0.01 0.29
MW Link 0.01 0.48
Trunk 0.01 0.37
Trunk Link 0.01 0.09
Primary 0.01 0.64
Secondary 0.01 0.51
Tertiary 0.01 0.49
Others 0.02 1.1
Table 3: Difference between the results using different sam-
ple sizes.
Road Type % Difference
Motorway -0.01
MW Junction 0.02
MW Link -0.03
Trunk 0.05
Trunk Link 0.08
Primary -0.01
Secondary 0.02
Tertiary -0.02
Others 0.01
% Gas Tank
PSI
Normal Region
Saving
Opportunity
Ignored Region
Figure 5: Example of fuel consumption as a function of tire
pressure for an arbitrary vehicle type.
to prevent cost runaway. Therefore, sampling the data
is desired. For each of the vehicle types identified un-
der “Vehicle Characteristics” in Figure 2, 5% of the
data is sampled. The maximum reported ”Fuel Level”
for each vehicle type is considered to be a full tank at
100%, and then all fuel level measurements are nor-
malized by that maximum for each vehicle type. For
each trip with “Ignition Id” present, the first and last
tire pressure measurements from all 4 tires are taken
and averaged (average of 8 measurements). The av-
% Gas Tank
(a) Heavy Vehicle.
% Gas Tank
(b) Medium Vehicle.
% Gas Tank
(c) Light Vehicle.
Figure 6: Graphs showing the performance of 3 classes of
vehicles. The area on the left of the dashed line is common.
The area on the right side of the lines is ignored.
erage tire pressure is assumed to be the tire pressure
for the trip, converted to PSI. The x-axis in Figure 5
represents the average tire pressure for each trip. The
x-axis is quantized by steps of 0.2 PSI, so that each
two consecutive integer PSI measurements on the x-
axis constitute 5 bins.
For all trips with fuel level at the beginning of the
trip larger than fuel level at the end of the trip (ignores
trips where refueling occurs), the difference between
the initial and final fuel levels is taken and normalized
by the maximum measurement. This value represents
DATA 2024 - 13th International Conference on Data Science, Technology and Applications
156

how much fuel percentage the trip consumed. All trip
percentages in the same x-axis bin are averaged. We
then arrive to the graph shown in Figure 5. The two
dashed vertical lines in the middle of the graph indi-
cate the region considered “normal”. The region to
the left of the lines represent fuel saving opportuni-
ties.
The dots on the graph show how much percentage
of the fuel tank on average a trip consumes at a given
tire pressure. As expected, lower tire pressures result
in reduced fuel economy. The data gives insight into
how much, in practice, this is occurring. This data
can be used to compare the fuel consumption of cus-
tomers who use a mobile application which notifies
them about low tire pressure, and those who don’t.
We exclude that result for confidentiality reasons.
The region to the right of the dashed lines is ig-
nored for the following reasons. Although better fuel
economy can be achieved, tire wear can become an is-
sue. Also, the reported tire pressure can be influenced
by the weight of the vehicle (which is more obvious in
trucks). The study is concerned with how much fuel
saving can be achieved if customers avoid the left re-
gion.
The red line is a fitting of a cubic polynomial,
which we found to best fit the data for almost all vehi-
cle types. This makes it possible to make predictions
on how much fuel is wasted when tire pressure is low.
Note that although this study is simple in princi-
ple, having tens or hundreds of such models updating
on regular basis can be expensive unless sampling is
used. Furthermore, it is tedious to track changes at the
vehicle level without using automated methods such
as an LLM, which is another justification to use an
intelligent sampling system.
6 CONCLUSION
In research paper, we explored some of the challenges
associated with the management and analysis of big
data, emphasizing the crucial role of data sampling
strategies. Given the vast amount of data generated
daily, data scientists often encounter difficulties due to
cost constraints and insufficient knowledge about the
underlying implementation. This complexity is made
even more challenging due to the diverse architectures
of data sources, such as vehicles with unique signal
names or constraints.
To address these challenges, we propose a sys-
tem designed to aid data scientists in the data col-
lection and sampling process. This system is engi-
neered to handle the intricacies of big data, offering
a straightforward and statistically robust approach for
data sampling. One of the key innovations highlighted
in our discussion is the utilization of recent advance-
ments in large language models. These models play
a pivotal role in simplifying the complexity associ-
ated with managing different data sources. Moreover,
we discussed a tagging technique to improve the ef-
ficiency of data sampling for the data stored in the
cloud. By implementing such tagging mechanism,
our system facilitates more precise and efficient data
sampling processes.
We also provided concrete examples to illustrate
how effective sampling methodologies can lead to the
extraction of accurate and meaningful insights from
large datasets. Through the provided case studies,
we demonstrate the significant performance improve-
ments achieved by adopting our proposed system.
As a result, this paper demonstrates the necessity
of an advanced data sampling system for any large-
scale organization experiencing rapid data growth.
Such a system is vital for ensuring that data scientists
can derive valuable insights in a timely and efficient
manner.
CONFLICT OF INTEREST
The authors of this paper declare that they have no
conflict of interest in relation to this work.
REFERENCES
Ai, M., Yu, J., Zhang, H., and Wang, H. (2021). Optimal
subsampling algorithms for big data regressions. Sta-
tistica Sinica, 31(2):361–390.
Albattah, W. (2016). The role of sampling in big data anal-
ysis. pages 1–5.
Beyel., H., Makke., O., Yuan., F., Gusikhin., O., and van der
Aalst., W. (2023). Analyzing cyber-physical systems
in cars: A case study. In Proceedings of the 12th In-
ternational Conference on Data Science, Technology
and Applications - DATA, pages 195–204. INSTICC,
SciTePress.
Beyel, H. H., Makke, O., Gusikhin, O., and van der
Aalst, W. M. P. (2024). Analyzing behavior in cyber-
physical systems in connected vehicles: A case study.
In De Weerdt, J. and Pufahl, L., editors, Business Pro-
cess Management Workshops, pages 92–104, Cham.
Springer Nature Switzerland.
Casamayor-Pujol, V., Morichetta, A., and Nastic, S. (2023).
Intelligent sampling: A novel approach to optimize
workload scheduling in large-scale heterogeneous
computing continuum. pages 140–149.
COVESA (2024). COVESA Vehicle Signal Specifi-
cation. https://github.com/COVESA/vehicle signal
specification. Accessed on 4/3/2024.
Intelligent Sampling System for Connected Vehicle Big Data
157

Djouzi, K., Beghdad-Bey, K., and Amamra, A. (2022). A
new adaptive sampling algorithm for big data classifi-
cation. Journal of Computational Science, 61:101653.
Djouzi, K., Beghdad Bey, K., and Amamra, A. (2023). Big
data sampling techniques: A state-of-the-art survey.
Elfil, M. and Negida, A. (2016). Sampling methods in clin-
ical research; an educational review. EMERGENCY,
4.
Google (2023). Gemini pro. url https://gemini.google.com/.
Hasanin, T., Khoshgoftaar, T. M., Leevy, J. L., and Bauder,
R. A. (2019). Severely imbalanced big data chal-
lenges: investigating data sampling approaches. Jour-
nal of Big Data, 6:107.
He, Q., Wang, H., Zhuang, F., Shang, T., and Shi, Z. (2015).
Parallel sampling from big data with uncertainty dis-
tribution. Fuzzy Sets and Systems, 258:117–133. Spe-
cial issue: Uncertainty in Learning from Big Data.
IEEE Standards Association (2015). IEEE Standard for
Ethernet Amendment 1: Physical Layer Specifica-
tions and Management Parameters for 100 Mb/s Op-
eration Over a Single Balanced Twisted Pair Cable
(100BASE-T1). Technical Report IEEE 802.3bw,
IEEE.
John, G. and Langley, P. (1996). Static versus dynamic sam-
pling for data mining. In Proc. of the 2nd International
Conference on Knowledge Discovery and Data Min-
ing, pages 367–370. Accessed on 4/3/2024.
Johnson, J. and Khoshgoftaar, T. (2020). The effects of data
sampling with deep learning and highly imbalanced
big data. Information Systems Frontiers, 22.
Louangrath, P. (2019). Sample size calculation for contin-
uous and discrete data. International Journal of Re-
search & Methodology in Social Science, 5(4):44–56.
Loyola R, D. G., Pedergnana, M., and Gimeno Garc
´
ıa,
S. (2016). Smart sampling and incremental function
learning for very large high dimensional data. Neural
Networks, 78:75–87. Special Issue on ”Neural Net-
work Learning in Big Data”.
Makke, O. and Gusikhin, O. (2018). Connected vehicle
prognostics framework for dynamic systems. Ad-
vances in Intelligent Systems and Computing.
Nanjundeswaraswamy, D. and Divakara, S. (2021). Deter-
mination of sample size and sampling methods in ap-
plied research. Proceedings on Engineering Sciences,
3:25–32.
Open Street Map (2024). Open Street Map Highways.
https://wiki.openstreetmap.org/wiki/Highways. Ac-
cessed on 4/3/2024.
OpenAI (2023). Chatgpt (mar 14 version). https://chat.
openai.com/chat.
Rocci, B. M., Krozal, C., and Rockwell, M. A. (2021). On-
board data request approval management. U.S. Patent
No. US 20210074083 A1.
Satyanarayana, A. (2014). Intelligent sampling for big data
using bootstrap sampling and chebyshev inequality. In
2014 IEEE 27th Canadian Conference on Electrical
and Computer Engineering (CCECE), pages 1–6.
Tran, T. B., Kolmanovsky, I., Biberstein, E., Makke, O.,
Tharayil, M., and Gusikhin, O. (2024). Effect of wind
on electric vehicle energy consumption: Sensitivity
analyses and implications for range estimation and op-
timal routing. ACM Journal on Autonomous Trans-
portation Systems, 1(2):1–31.
Zhang, H. and Wang, H. (2021). Distributed subdata selec-
tion for big data via sampling-based approach. Com-
putational Statistics & Data Analysis, 153:107072.
DATA 2024 - 13th International Conference on Data Science, Technology and Applications
158
