
Evolutionary Multi-Objective Task Scheduling for Heterogeneous
Distributed Simulation Platform
Xutian He
1 a
, Yanlong Zhai
2(Q) b
, Ousman Manjang
2 c
and Yan Zheng
2 d
1
School of Computer Science and Technology, Beijing Institute of Technology, Beijing, China
2
School of Cyberspace Science and Technology, Beijing Institute of Technology, Beijing, China
Keywords:
Distributed Simulation, Script Engine, Simulation Task Scheduling, Multi-Objective Optimization, Genetic
Algorithm.
Abstract:
Most existing distributed simulation platforms lack native support for Python scripts, thereby hindering the
seamless integration of AI models developed in Python. Some simulation platforms support script languages
like Lua or javascript, but scheduling tasks in heterogeneous simulation platforms that are composed of sim-
ulation engine and script engine is a challenging problem. Moreover, conventional task scheduling methods
often overlook the simulation time constraints, which are essential for simulation synchronization. In this pa-
per, we propose a Heterogeneous Distributed Simulation Platform (HDSP) that could integrate different script
languages, especially Python, to empower the simulation by leveraging intelligent AI models. A Dynamic
Multi-Objective Optimization (D-MO) Scheduler is also designed to efficiently schedule simulation tasks that
run across heterogeneous simulation engines and satisfy simulation synchronization constraints. HDSP in-
tegrates various script engines, enhancing its adaptability to model dynamic simulation logic using different
script languages. D-MO Scheduler optimizes Simulation Acceleration Ratio (SAR), Average Weighted Wait-
ing Time (AWWT), and Resource Utilization (RU). The D-MO scheduling problem is characterized as an
NP-hard problem, tackled using the NSGA-III algorithm. The simulation time synchronization constraints
are implemented through Lower Bound on Time Stamp (LBTS) and lookahead approach. The comparative
results and statistical analysis demonstrate the superior efficacy and distribution performance of proposed
D-MO Scheduler. The proposed HDSP and D-MO Scheduler significantly boost the capability to support
Python-based AI algorithms, and navigate complex scheduling demands efficiently.
1 INTRODUCTION
In the realm of computational simulation, the inte-
gration of artificial intelligence (AI) algorithms rep-
resents a paradigm shift towards more intelligent and
adaptable systems(Jawaddi and Ismail, 2024). How-
ever, simulation platforms have primarily been devel-
oped using traditional programming languages such
a C++(Adday et al., 2024; Ierusalimschy et al.,
2011) and script languages such as Lua(Chang et al.,
2019). Consequently, they often lack direct support
for Python, despite its widespread adoption in the AI
research community. Therefore, the integration of
Python script engine with simulation platforms en-
ables the application of cutting-edge AI algorithms,
a
https://orcid.org/0009-0005-7334-0799
b
https://orcid.org/0000-0002-0168-8308
c
https://orcid.org/0009-0005-9337-2405
d
https://orcid.org/0009-0008-3083-3931
improving advanced simulation capabilities.
Research efforts to integrate the Python engine
into complex simulation platforms have revealed con-
siderable challenges. For instance, Liu et al. man-
aged to extend Python support to Java-based systems,
but at the expense of excluding traditional script lan-
guages like Lua, known for their established ecosys-
tems(Liu et al., 2021). Wornow et al. redesign an
existing medical simulation engine utilizing Python.
However, this approach introduced additional work-
load and restricted its application scope solely to the
medical field(Wornow et al., 2023). These limita-
tions highlights the necessity for a more robust ap-
proach that embraces Python alongside other script
languages. Additionally, the integration of script en-
gines introduces heterogeneity to the simulation plat-
form, requiring consideration of synchronization time
constraints. These factors are overlooked by many
prevailing task scheduling methods, resulting in in-
150
He, X., Zhai, Y., Manjang, O. and Zheng, Y.
Evolutionary Multi-Objective Task Scheduling for Heterogeneous Distributed Simulation Platform.
DOI: 10.5220/0012814300003758
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2024), pages 150-157
ISBN: 978-989-758-708-5; ISSN: 2184-2841
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

accuracies and inconsistencies in the simulation out-
comes. Therefore, there is a pressing demand for
task scheduling methods that accommodate simula-
tion time synchronization constraints, and optimize
conflicting goals such as makespan and resource con-
sumption(Lu et al., 2020), which is a NP-hard multi-
objective optimization (MO) problem.
In this paper, we propose Heterogeneous Dis-
tributed Simulation Platform (HDSP) and the Dy-
namic Multi-Objective Optimization (D-MO) Sched-
uler, designed to support Python-based AI algo-
rithms while ensuring simulation time synchroniza-
tion. HDSP addresses the absence of native Python
support by integrating multiple script engines, en-
hancing its adaptability to diverse script languages.
The D-MO Scheduler is designed to solve the NP-
hard task scheduling problem in HDSP. It opti-
mizes multiple objectives, including Simulation Ac-
celeration Ratio (SAR), Average Weighted Waiting
Time (AWWT), and Resource Utilization (RU), all
the while accounting for synchronization constraints.
The D-MO Scheduler employs NSGA-III(Deb and
Jain, 2014) for the scheduling algorithm, and man-
ages the synchronization constraint through Lower
Bound on Time Stamp (LBTS) and lookahead ap-
proach. This innovation enables the integration of
Python-based AI algorithms into simulation agents,
and promotes the simulation field towards a more
adaptable and intelligent future.
2 RELATED WORK
Considering integration of Python engine for simu-
lation platforms, two types of methods are adapted
in existing research. The first type involves the con-
struction of simulation platforms entirely in Python,
thereby inherently supporting Python scripts. Souza
et al. proposed a simulation framework developed in
Python to simulate resource management policies in
Edge Computing environments(Souza et al., 2023).
Chambon et al. developed a Python simulator to
model user consumption behavior for water distribu-
tion networks(Chambon et al., 2024). However, this
approach constrains its application to limited scenar-
ios. The second type extends Python support to exist-
ing platforms. D’Aquin et al. developed Python in-
terface to PartMC, a simulation model implemented
in Fortran(D’Aquino et al., 2024). Wong et al. pro-
posed a dedicated Python library built to support sim-
ulation(Wong et al., 2023). These methods lack versa-
tility because they exclude traditional script languages
like Lua, which possess established ecosystems.
The embedding of multiple script engines into
simulation platforms introduces heterogeneity, mak-
ing simulation time synchronization of task schedul-
ing become a great challenge. Heterogeneous Ear-
liest Finish Time (HEFT) is an effective metric for
scheduling in heterogeneous systems. Vasilios and
Karim introduced promoted HEFT method improved
by an iteration and parallel processing, which op-
timized simulation makespan(Kelefouras and Dje-
mame, 2022). GA methods have been widely applied
to task scheduling in heterogeneous systems. Hoseiny
et al.’s priority-aware GA(Hoseiny et al., 2021) and
Duan et al.’s improved GA with adaptable crossover
and mutation rates(Duan et al., 2018) exemplify the
single-objective optimization strategies deployed.
Moreover, the realm of multi-objective optimiza-
tion (MO) in scheduling, particularly prevalent in het-
erogeneous simulation landscapes, calls for more in-
tricate solutions. To address Dynamic Flexible Job
Shop Scheduling (DFJSS), which is designed on het-
erogeneous system, GA is also widely used. Sang
et al. proposed an improved optimization algorithm
named NSGA-III-APEV based on NSGA-III(Sang
et al., 2020), while Zhu et al. accelerated GA train-
ing with an efficient sample selection algorithm(Zhu
et al., 2023). Additionally, Whitley et al. sched-
uled heterogeneous satellite systems through adapted
task ordering strategies and improved genetic algo-
rithm(Whitley et al., 2023). Further, The novel appli-
cation of Q-learning by Zhang et al. to guide Particle
Swarm Optimization (PSO) underscores the growing
integration of reinforcement learning in MO schedul-
ing challenges(Zhang et al., 2024). Despite these ad-
vancements, the critical consideration of simulation
time synchronization in heterogeneous systems re-
mains unaddressed, suggesting an significant gap for
further exploration and innovation.
3 HDSP DEVELOPMENT
3.1 Architecture
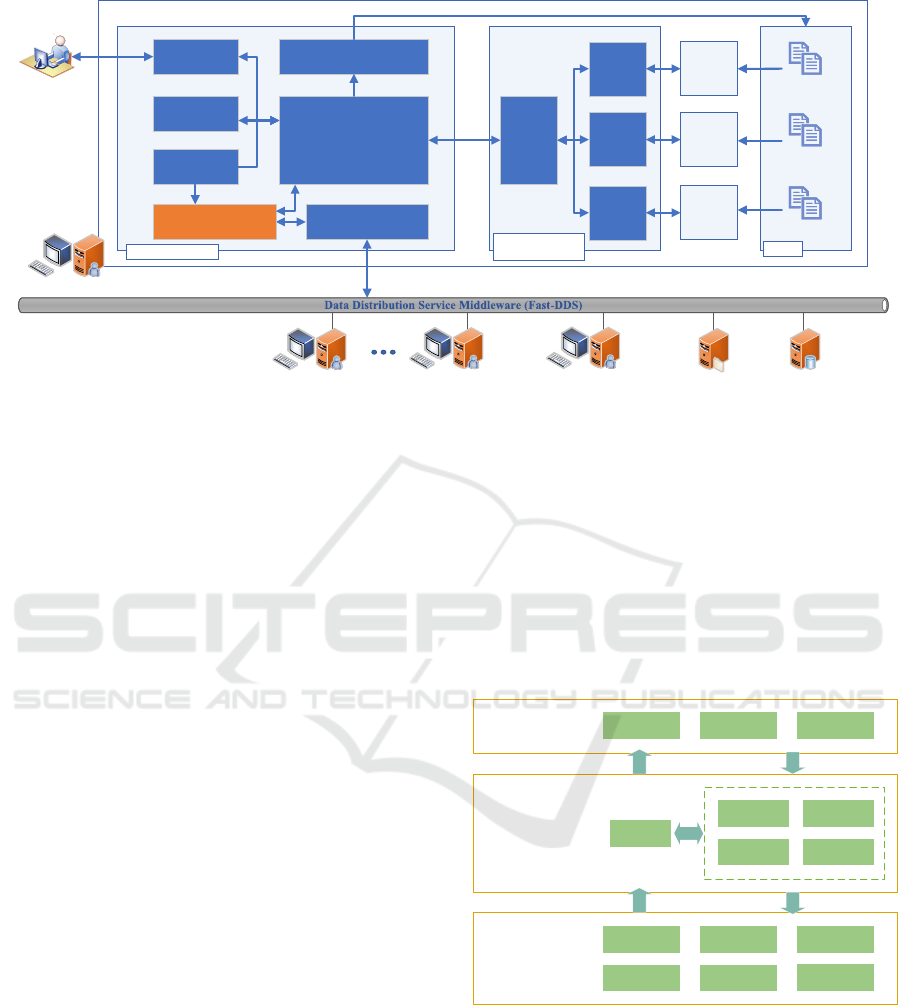
Figure 1 illustrates HDSP’s architecture, featuring a
control center (root node) and multiple simulation
nodes (sub-nodes), which engage in distributed com-
munication via DDS middleware(eProsima, 2024).
The distinction between control center and simula-
tion nodes lies in D-MO Scheduler. Control center’s
D-MO Scheduler allocates simulation tasks to simu-
lation nodes with genetic algorithms, while simula-
tion nodes’ schedulers only manage local tasks. Sim-
ulation nodes consist of the Simulation Module and
Simulation-Script Interact Module. The functions of
main components are described below:
Evolutionary Multi-Objective Task Scheduling for Heterogeneous Distributed Simulation Platform
151
DDS Messager
Timer
Log
UI
Operator
Simulation Unit
Simulation Module
Simulation-Script
Interaction Module
Front-end
Python
Backend
Lua
Backend
JS
Backend
Python
Engine
Lua
Engine
JS
Engine
Python Scripts
Lua Scripts
Scripts
D-MO Scheduler
JS Scripts
Simulation Node
Database
Server
Simulation Node
(Sub-node)
Log
Server
Control Center
(Root Node)
Simulation Node
(Sub-node)
Simulation Files
Figure 1: HDSP architecture.
1. Simulation Unit: Perform simulation calculations
utilizing computational resources.
2. DDS Messenger: Communicates data and control
information via Fast-DDS middle ware, an imple-
mentation of data-centric communication proto-
col.
3. D-MO Scheduler: Optimize and perform simula-
tion task scheduling with GA. The scheduling al-
gorithm satisfies simulation time synchronization
constraints, and optimizes multiple objectives.
4. Simulation-Script Interact Module: Provides sim-
ulation APIs for different script languages and in-
tegrates multiple script engines. It also offers a
uniform interface for calling scripts to the Simu-
lation Module.
3.2 Simulation-Script Interaction
Module
The Simulation-Script Interaction Module comprises
of a front end for interface methods, and multiple
back ends that manage script engines. This mod-
ule integrates Python, Lua, and JavaScript engines
through a unified interface, and connects simulation
APIs to various script engines, allowing script-based
simulation control. It supports AI script integration in
Python and dynamic engine switching.
3.2.1 Script Operation Interface
The interaction layer is divided into two sub-layers:
the front end, providing a unified script operation in-
terface, and the back end, which operates the multiple
script engines. The interface methods are defined in
the front end, and implemented in the back end.
3.2.2 Data Type Conversion
The data type conversion in Simulation-Script Inter-
action Module is illustrated in Figure 2. This module
facilitates compatibility between C++ and script lan-
guages including Python, Lua and JavaScript through
intermediate data types.
char int float
C++ Data Type
in
Simulation Module
Value
String Number
Immediate Data Type
in
Simlation-Script
Interaction Layer
Boolean ...
Script Data Type
in
Script Engine
PyObject* JSValueRef
JSValueRef
...
lua_Integer
JSObjectRef
lua_Integer
JSStringRef
Figure 2: Data type conversion between C++ and script lan-
guages, including Python, Lua and JavaScript.
3.2.3 Simulation API Binding
The Simulation-Script Interaction Module binds sim-
ulation APIs to script engines, enabling scripts to
monitor and control simulation process. Table 1
presents some supported simulation APIs.
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
152
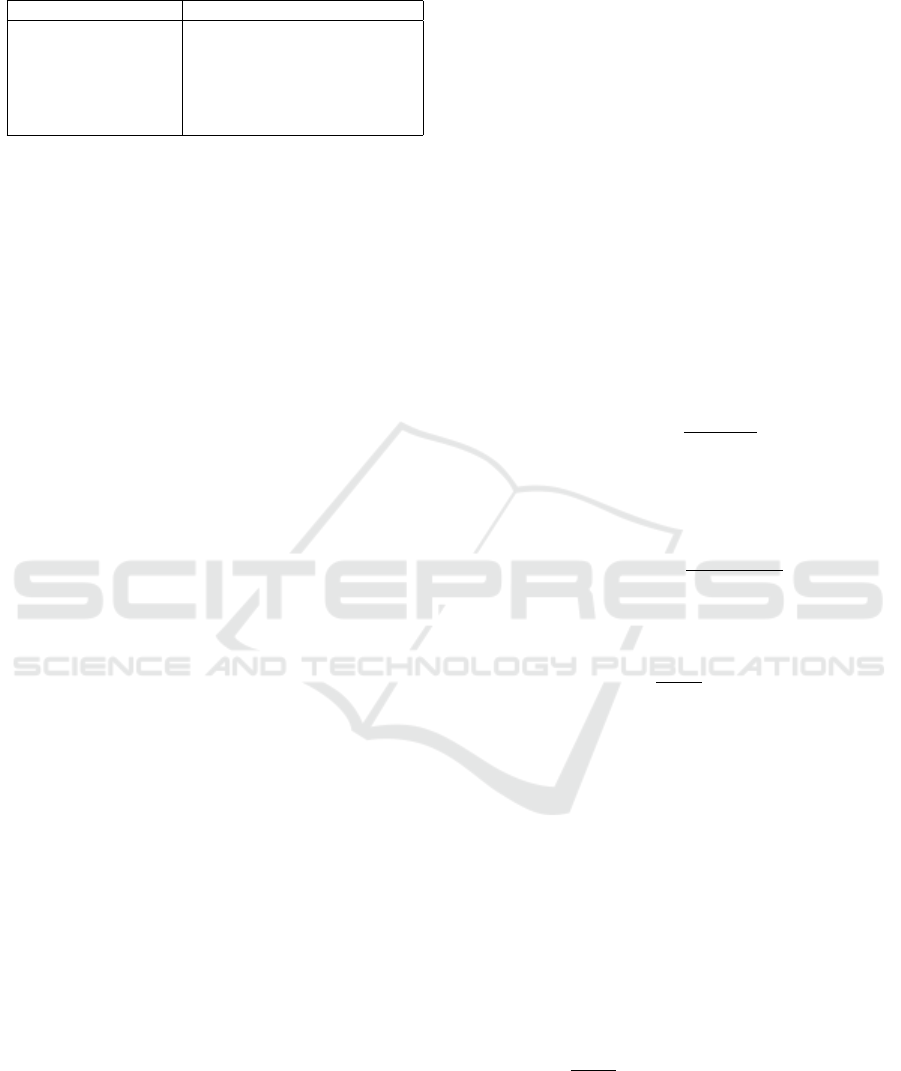
Table 1: Part of simulation APIs for script engines.
Function Name Description
initialize() Initialize simulation environment
configure(paras) Configure simulation parameters
createEntity(args) Create an entity
removeEntity(id) Remove an entity
getEntityState(id) Get the state of an entity
setEntityState(id, state) Set the state of an entity
4 D-MO SCHEDULER
4.1 System Model
Figure 3 presents the D-MO Scheduler structure, with
Global Scheduler (GS) at the root node and Local
Scheduler (LS) at sub-nodes. GS optimizes task
scheduling policies via GA, while LS schedules tasks
based on resources, timestamps, and simulation time
synchronization constraints. The simulation time syn-
chronization constraints in D-MO Scheduler are re-
alized through the Lower Bound on Time Stamp
(LBTS) and lookahead(Zhiwu and Yanfeng, 2009).
The workflow of D-MO Scheduler involves four
phases: task allocation, task scheduling, simulation
advancement, and synchronization.
During the task allocation phase, GS computes the
global LBTS using equation 1, and notifies all LSs.
Afterwards, based on the optimal allocation policies
GS allocates simulation tasks to the corresponding
simulation nodes. Assuming that there are M tasks
to be scheduled, the LBT S
Global
is determined as:
LBT S
Global
= min
i
(T S
i
+ lookahead
i
), i ∈ [1, M] (1)
During task scheduling phase, each LS receives
LBT S
Global
and the tasks list from the GS, then sched-
ules the assigned tasks in parallel. The LS sched-
ules a task immediately if its resource consumption
falls within the remaining resources of the simulation
node; otherwise, it waits for currently running tasks
to complete and release resources before proceeding
to schedule the next one.
During simulation advancement phase, each sim-
ulation node conducts computation.
Finally, during the synchronization phase, LS
waits until the local simulation time T
local
reaches
LBT S
Global
, while recording the consumed wall-clock
time of this round as ∆T
wall clock
. Subsequently, LS up-
dates GS with the new tasks and ∆T
wall clock
, then GS
initiates the next cycle, starting with task allocation.
4.2 Problem Formulation
We consider required data for scheduling as shown in
Figure 3, which consists of M simulation tasks, in-
dexed by m = {1, 2, ..., M}, and N simulation nodes,
denoted by n = {1, 2, ..., N}. Each simulation task
runs on a single simulation node, which can process
multiple tasks concurrently.
Definition 1 (Task): Task
m
is defined by Eq.2, de-
tailing its timestamp T S
m
, execution time on the root
node T
exe_std_m
, priority weight λ
i
, and required com-
puting resources R
m
= {R
m_cpu
, R
m_gpu
, R
m_ram
}.
Task
m
= {T S
m
, lookahead
m
, T
exe_std_m
, λ
m
, R
m
} (2)
Definition 2 (Node): A Node
n
is characterized by
its computing resources R
n
= {R
n_cpu
, R
n_gpu
, R
n_ram
}
and relative simulation rate Rate
n
, as defined in Eq. 3.
Node
n
= {R
n
, Rate
n
} (3)
Definition 3 (Relative Simulation Rate): Rate
n
measures a node’s processing speed, which is relative
to the root node’s rate (Rate
std
).
Rate
n
=
Rate
abs_n
Rate
std
(4)
Rate
abs_n
represents the Node
n
’s absolute simu-
lation rate based on simulation step size Step, and
elapsed wall clock time during one step ∆T
wall clock_n
.
Rate
abs_n
=
Step
∆T
wall clock_n
(5)
Definition 4 (Task Execution Time): The execution
time for Task
m
on Node
n
is given by:
T
exe_m
=
1
Rate
n
· T
exe_std_m
(6)
Definition 5 (Task Wait Time): The wait time
for Task
m
on Node
n
depends on the execution time
of preceding task groups (PEG) and computed by
Eq.7. PEG
i
constitutes a set of tasks that can be
executed concurrently on a node, given as PEG
i
=
{Task
1
, Task
2
, ..., Task
L
i
}.
T
wait_m
accumulates the execution time of all
PEGs before Task
m
, with each PEG
i
’s execution time
being the longest standard execution time T
exe_std_ j
among its tasks, adjusted by Node
n
’s simulation rate.
T
wait_m
=
W
∑
i=1
T
exe_PEG
i
=
1
Rate
n
·
W
∑
i=1
max
j
(T
exe_std_ j
), j ∈ [1, L
i
]
(7)
Definition 6 (Simulation Acceleration Ratio,
SAR): The Simulation Acceleration Ratio (SAR)
evaluates scheduling efficiency, defined by the ratio
of serial to distributed simulation wall-clock time:
Evolutionary Multi-Objective Task Scheduling for Heterogeneous Distributed Simulation Platform
153

Global
Scheduler
Local
Scheduler 2
Local
Scheduler 1
Local
Scheduler 3
Tasks:
Nodes:
LBTS
Global
= min
i
(TS
i
+ lookahead
i
), i ∈ [1, M ]
1 2 3 4 5 6
3 2 1 3 1 1
Tasks:
LBTS = LBTS
Global
2
Tasks:
LBTS = LBTS
Global
Tasks:
LBTS = LBTS
Global
1 43 5 6
Scheduling Plan
Sub-node 1 Sub-node 2 Sub-node 3
Root Node
Figure 3: D-MO Scheduler.
SAR =
T
serial_makespan
T
distributed_makespan
(8)
Serial simulation time, T
serial_makespan
, sums the
standard execution time:
T
serial_makespan
=
M
∑
m=1
T
exe_std_m
(9)
For a Node
n
at step x, where k simulation tasks are
completed, the distributed simulation time accounts
for the maximum waiting and execution time:
T
wall clock_x_n
= max
i
(T
wait_i
+ T
exe_i
), i ∈ [1, k] (10)
Each parallel cycle is signified by the interval be-
tween LBT S updates. During the i-th parallel cycle,
with simulation time x ∈ [LBT S
i−1
, LBT S
i
), the total
running time (wall-clock time) of Node
n
is:
T
makespan_n_i
=
LBT S
i
∑
x=LBT S
i−1
T
wall clock_x_n
(11)
The total time for distributed simulation accumu-
lates over S parallel cycles:
T
parallel_s
= max
n
(T
makespan_n_s
), n ∈ [1, N] (12)
Therefore, the total time consumption (wall-clock
time) for distributed parallel simulation is:
T
distributed_makespan
=
S
∑
s=1
T
parallel_s
(13)
Consequently, the SAR is calculated as:
SAR =
T
serial_makespan
T
distributed_makespan
=
∑
n
i=1
T
exe_std_i
∑
S
s=1
max
n
(T
makespan_n_s
)
(14)
4.3 Optimized Objectives
The D-MO Scheduler focuses on optimizing three
objectives: SAR (Simulation Acceleration Ratio),
AWW T (Average Weighted Waiting Time), and RU
(Resource Utilization), aiming to enhance efficiency,
fairness, and load balancing.
1. SAR measures the efficiency by comparing serial
and distributed simulation time. Our proposed D-
MO Scheduler aims to maximize the SAR:
SAR =
∑
n
i=1
T
exe_std_i
∑
S
s=1
max
n
(T
makespan_n_s
)
(15)
2. The D-MO scheduler aims to minimize task wait-
ing time by optimizing AWW T by the following
minimization function:
AWW T =
1
M
M
∑
m
(λ
m
· T
wait_m
) (16)
3. The D-MO Scheduler aims to maximize RU
which is measure of the efficiency of resource:
RU =
∑
M
m
(
1
Rate
m
· R
m
· T
exe_m
)
∑
N
n
R
n
· T
wall clock_makespan
(17)
5 EXPERIMENTS AND RESULTS
5.1 Experimental Design
To assess the performance of MO genetic algorithm
NSGA-III against the baseline algorithms (Random,
Greedy, and Polling) in task scheduling, we con-
ducted comparative experiments over 16 problem in-
stances, focusing on three optimization goals: SAR,
AWWT, and RU. We carried out 30 independent tri-
als for both NSGA-III and Random algorithms. Each
problem instance ranged from 50 to 600 tasks across
10 to 15 nodes. To introduce randomness of tasks and
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
154
Figure 4: Curves of optimization objectives (SAR, AWWT, RU) of NSGA-III, Random, Greedy and Polling algorithms.
the heterogeneity of nodes, we randomly generate pa-
rameters such as priority and resources. Task time
stamps were randomly assigned within 10 simulation
steps. This setup aimed to form different node loads
across different instances.
We employ NSGA-III as the multi-objective opti-
mization genetic algorithm. Its parameters include a
population size of 50, 500 evolution, a mutation prob-
ability of 0.001, a crossover probability of 0.8, and
the use of binary coding with random initialization.
NSGA-III’s optimal solutions form the Pareto fron-
tier, from which we compute SAR, AWWT, and RU
for each solution. Subsequently, we average these val-
ues to derive experimental results.
To demonstrate the effectiveness of NSGA-III, we
conducted comparative analysis with the Random,
Greedy, and Polling algorithms, as shown in Figure.4.
The Random algorithm distributes tasks uniformly
across nodes, the Greedy algorithm prioritizes nodes
with the most available resources, and the Polling al-
gorithm allocates tasks to nodes in a sequential man-
ner.
5.2 Scheduling Performance
Figure 4 illustrates the results of NSGA-III, Random,
Greedy, and Polling algorithms across three objec-
tives, with NSGA-III and Random curves averaged
from 30 trials. Compared to baseline algorithms,
NSGA-III significantly improves the efficiency of
simulation scheduling, evidenced by higher SAR,
lower AWWT, and increased RU. The experimental
findings outlined in Table 2 further substantiates the
advantages of NSGA-III over Random, Greedy, and
Polling algorithms across all objectives, with these
benefits particularly evident under heavier node loads.
This validates NSGA-III’s superior load tolerance and
adaptability across 16 diverse problem instances.
Additionally, it’s worth noting that Greedy
slightly outperforms Polling, especially under high
loads. This could attribute to Greedy’s dynamic
resource-based task allocation strategy. However,
Greedy approach is susceptible to local optima, which
is inferior to NSGA-III.
5.3 Distribution Analysis
Figure 5 shows SAR, AWWT, and RU distributions
from 30 NSGA-III and Random algorithm trials. Re-
garding the distribution of optimization results, we
observe that NSGA-III generates superior schedul-
ing policies and more concentrated optimization out-
comes, especially for AWWT. Table 3 provides stan-
dard deviation of SAR, AWWT, and RU from 30
NSGA-III and Random algorithm trials across 16 in-
stances. NSGA-III’s standard deviation is similar
to Random’s for SAR, but is consistently lower for
AWWT (100% improvement) and RU (87.5% im-
provement). The results reveals that NSGA-III algo-
rithm demonstrates superior distributional centraliza-
Evolutionary Multi-Objective Task Scheduling for Heterogeneous Distributed Simulation Platform
155
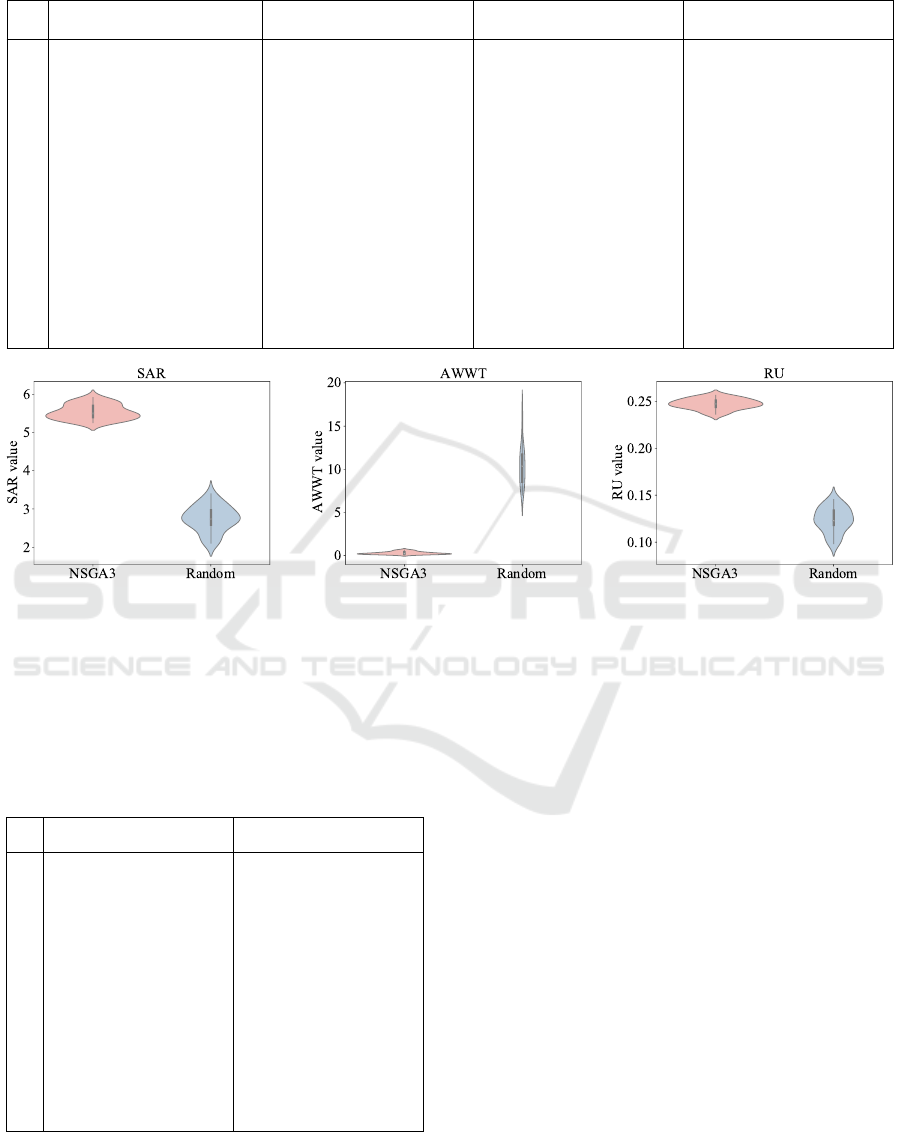
Table 2: The comparison results for algorithms NSGA-III, Random, Greedy and Polling.
ins NSGA-III Random Greedy Polling
SAR AWWT RU SAR AWWT RU SAR AWWT RU SAR AWWT RU
1 5.45 0.17 2.05E-01 2.40 7.14 9.72E-02 4.03 0.33 1.56E-01 3.28 1.82 1.31E-01
2 4.34 0.82 2.11E-01 2.03 11.42 1.05E-01 2.52 4.28 1.24E-01 2.61 3.37 1.34E-01
3 5.53 0.30 2.47E-01 2.75 10.41 1.24E-01 3.98 1.74 1.73E-01 3.11 2.70 1.44E-01
4 7.40 0.76 3.22E-01 3.18 13.04 1.44E-01 5.28 3.89 2.26E-01 3.60 6.06 1.64E-01
5 8.91 1.75 3.28E-01 4.02 15.57 1.50E-01 6.28 6.76 2.27E-01 5.58 8.24 2.09E-01
6 8.34 3.18 3.47E-01 3.50 22.54 1.50E-01 6.19 11.77 2.47E-01 4.33 13.10 1.85E-01
7 9.06 6.11 3.58E-01 3.56 25.16 1.53E-01 7.00 13.14 2.63E-01 4.41 15.36 1.86E-01
8 9.16 8.48 3.57E-01 3.60 28.49 1.51E-01 7.13 16.75 2.73E-01 4.96 19.85 2.06E-01
9 5.27 0.48 1.54E-01 2.20 7.37 7.10E-02 1.94 1.39 7.11E-02 2.67 1.32 8.88E-02
10 7.60 0.14 2.04E-01 3.52 6.31 9.73E-02 4.66 0.75 1.26E-01 4.18 1.45 1.15E-01
11 7.28 0.17 2.53E-01 2.99 10.64 1.06E-01 4.89 2.55 1.61E-01 4.27 2.58 1.49E-01
12 10.04 0.78 2.72E-01 4.13 14.91 1.19E-01 7.02 4.59 1.89E-01 4.95 7.23 1.43E-01
13 9.92 2.50 2.88E-01 4.21 19.92 1.30E-01 7.83 7.26 2.22E-01 5.55 10.24 1.72E-01
14 9.16 5.85 3.23E-01 3.71 28.81 1.39E-01 6.99 14.81 2.30E-01 4.68 15.08 1.77E-01
15 11.47 6.12 3.19E-01 4.58 24.15 1.37E-01 8.65 13.33 2.33E-01 5.57 15.33 1.66E-01
16 11.41 10.20 3.26E-01 4.29 31.69 1.35E-01 8.19 18.51 2.30E-01 5.28 21.13 1.64E-01
Figure 5: Violin plots of the SAR, AWWT, and RU distributions of the optimization results with NSGA-III and the Random
algorithm.
tion and stability in optimization results, indicating
NSGA-III’s superior stability in optimization results.
Table 3: The standard deviation of the optimization objec-
tives of NSGA-III and Random over 30 independent runs in
16 instances.
ins NSGA-III RandomSolv
SAR AWWT RU SAR AWWT RU
1 0.31 0.13 4.21E-03 0.39 2.52 1.30E-02
2 0.25 0.29 6.79E-03 0.21 2.90 9.24E-03
3 0.19 0.16 5.58E-03 0.33 2.33 1.32E-02
4 0.36 0.31 1.22E-02 0.33 1.68 1.29E-02
5 0.35 0.33 1.16E-02 0.36 1.88 1.21E-02
6 0.36 0.51 1.32E-02 0.27 2.62 1.03E-02
7 0.26 0.42 9.02E-03 0.30 2.40 1.22E-02
8 0.32 0.62 1.11E-02 0.30 2.19 1.16E-02
9 0.35 0.42 4.03E-03 0.29 2.78 6.82E-03
10 0.32 0.10 6.21E-03 0.31 1.30 7.69E-03
11 0.21 0.09 5.38E-03 0.30 2.14 8.78E-03
12 0.33 0.24 6.77E-03 0.46 2.15 1.11E-02
13 0.31 0.55 8.17E-03 0.37 2.24 1.04E-02
14 0.29 0.59 8.99E-03 0.35 2.34 1.14E-02
15 0.44 0.53 1.04E-02 0.38 2.15 1.03E-02
16 0.33 0.47 7.75E-03 0.35 2.47 9.49E-03
In summary, the D-MO simulation task schedul-
ing problem is best solved by NSGA-III.
6 CONCLUSION
In this paper, we introduce the Heterogeneous Dis-
tributed Simulation Platform (HDSP) to facilitate
Python-based AI algorithms, and the Dynamic Multi-
Objective (D-MO) Scheduler supporting simulation
time synchronization. HDSP integrates multiple
script engines, improving its adaptability to diverse
script languages. The NSGA-III algorithm enables
the D-MO Scheduler to efficiently optimize key ob-
jectives: Simulation Acceleration Ratio (SAR), Av-
erage Weighted Waiting Time (AWWT), and Re-
source Utilization (RU). Our experiments demon-
strate NSGA-III’s superior efficacy, showing D-MO
Scheduler’s ability to outperform traditional schedul-
ing methods. The statistical analysis also validates
NSGA-III’s load tolerance and distributional central-
ization, indicating its adaptability and reliability to di-
verse heterogeneous simulation configurations.
In future research, we will focus on integrating
more advanced AI algorithms and expanding HDSP’s
support for emerging script languages, in order to
meet the dynamic needs of both research and indus-
trial applications.
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
156

ACKNOWLEDGEMENTS
In this work, artificial intelligence (AI) was used for
grammar checking and sentence optimization.
REFERENCES
Adday, G. H., Subramaniam, S. K., Zukarnain, Z. A., and
Samian, N. (2024). Investigating and analyzing sim-
ulation tools of wireless sensor networks: A compre-
hensive survey. IEEE Access, 12:22938–22977.
Chambon, C., Piller, O., and Mortazavi, I. (2024). A ro-
bust simulator of pressure-dependent consumption in
python. Journal of Hydroinformatics, pages 284–303.
Chang, Y (Chang, Y., Wei, DX (Wei, D., Jia, HH (Jia,
H., Curreli, C (Curreli, C., Wu, ZZ (Wu, Z., Sheng,
M (Sheng, M., Glaser, SJ (Glaser, S. J., and Yang,
XD (Yang, X. (2019). Spin-scenario: A flexible
scripting environment for realistic mr simulations.
Journal of Magnetic Resonance, pages 1–9.
D’Aquino, Z., Arabas, S., Curtis, J. H., Vaishnav, A.,
Riemer, N., and West, M. (2024). Pypartmc: A
pythonic interface to a particle-resolved, monte carlo
aerosol simulation framework. SoftwareX, 25:101613.
Deb, K. and Jain, H. (2014). An evolutionary many-
objective optimization algorithm using reference-
point-based nondominated sorting approach, part i:
Solving problems with box constraints. IEEE Trans-
actions on Evolutionary Computation, 18(4):577–
601.
Duan, K., Fong, S., Siu, S. W. I., Song, W., and Guan,
S. S. (2018). Adaptive incremental genetic algorithm
for task scheduling in cloud environments. Symmetry,
10(5):168.
eProsima (2024). Fast dds documentation. Accessed: 2024-
03-26.
Hoseiny, F., Azizi, S., Shojafar, M., Ahmadiazar, F., and
Tafazolli, R. (2021). Pga: A priority-aware genetic
algorithm for task scheduling in heterogeneous fog-
cloud computing. In IEEE INFOCOM 2021 - IEEE
Conference on Computer Communications Workshops
(INFOCOM WKSHPS), pages 1–6.
Ierusalimschy, R., De Figueiredo, L. H., and Celes, W.
(2011). Passing a language through the eye of a nee-
dle. Communications of the ACM, 54(7):38–43.
Jawaddi, S. N. A. and Ismail, A. (2024). Integrating openai
gym and cloudsim plus: A simulation environment for
drl agent training in energy-driven cloud scaling. Sim-
ulation Modelling Practice and Theory, page 102858.
Kelefouras, V. I. and Djemame, K. (2022). Workflow
simulation and multi-threading aware task scheduling
for heterogeneous computing. J. Parallel Distributed
Comput., 168:17–32.
Liu, Z., Chen, Z., and Song, K. (2021). Spinspj: a novel
nmr scripting system to implement artificial intelli-
gence and advanced applications. BMC bioinformat-
ics, page 581.
Lu, C., Gao, L., Yi, J., and Li, X. (2020). Energy-efficient
scheduling of distributed flow shop with heteroge-
neous factories: A real-world case from automobile
industry in china. IEEE Transactions on Industrial
Informatics, 17(10):6687–6696.
Sang, Y., Tan, J., and Liu, W. (2020). Research on
many-objective flexible job shop intelligent schedul-
ing problem based on improved nsga-iii. IEEE Access,
8:157676–157690.
Souza, P., Ferreto, T., and Calheiros, R. N. (2023). Ed-
gesimpy: Python-based modeling and simulation of
edge computing resource management policies. Fu-
ture Gener. Comput. Syst., 148:446–459.
Whitley, D., Quevedo De Carvalho, O., Roberts, M., Shetty,
V., and Jampathom, P. (2023). Scheduling multi-
resource satellites using genetic algorithms and per-
mutation based representations. In Proceedings of the
Genetic and Evolutionary Computation Conference,
pages 1473–1481.
Wong, T., Timoshkin, I. V., Macgregor, S. J., Wilson, M. P.,
and Given, M. J. (2023). The design of a python li-
brary for the automatic definition and simulation of
transient ionization fronts. IEEE Access, 11:26577–
26592.
Wornow, M., Gyang Ross, E., Callahan, A., and Shah,
N. H. (2023). Aplus: A python library for usefulness
simulations of machine learning models in healthcare.
Journal of Biomedical Informatics, 139:104319.
Zhang, W., Li, C., Gen, M., Yang, W., and Zhang, G.
(2024). A multiobjective memetic algorithm with par-
ticle swarm optimization and q-learning-based local
search for energy-efficient distributed heterogeneous
hybrid flow-shop scheduling problem. Expert Syst.
Appl., 237(Part C):121570.
Zhiwu, D. and Yanfeng, L. (2009). Dynamic time man-
agement algorithms research in simulation system hla-
based. In 2009 Second International Workshop on
Computer Science and Engineering, volume 1, pages
580–583.
Zhu, L., Zhang, F., Zhu, X., Chen, K., and Zhang, M.
(2023). Sample-aware surrogate-assisted genetic pro-
gramming for scheduling heuristics learning in dy-
namic flexible job shop scheduling. In Proceedings
of the Genetic and Evolutionary Computation Confer-
ence, pages 384–392.
Evolutionary Multi-Objective Task Scheduling for Heterogeneous Distributed Simulation Platform
157
