
On the Privacy Afforded by Opaque Identifiers in Traffic Monitoring
Marcus Gelderie
a
Aalen University of Applied Sciences, Beethovenstr. 1,73430 Aalen, Germany
fi
Keywords:
Privacy, License Plate Recognition, Differential Privacy, Smart City, Traffic Monitoring.
Abstract:
We consider traffic monitoring via license plate recognition. Anonymizing license plates by substituting ran-
domized identifiers is a common privacy enhancing strategy in this situation. However, the systematic effect of
this anonymization strategy has not been fully explored. We study the information gain of an adversary upon
observing such anonymized output. We find the effectiveness of randomized IDs to deteriorate with decreas-
ing popularity of a given route. Moreover, we study the effect differential privacy has on the situation, given
that an adversary must be assumed to have prior knowledge about the likelihood of various traffic patterns. We
find that travel participants with a very strong preference for a given route are put most at risk.
1 INTRODUCTION
In the recent past, smart traffic monitoring systems
(TMS) have received considerable attention from both
the academic community as well as from commercial
vendors (e.g. (Jain et al., 2019; Biswas et al., 2016;
Bisio et al., 2022; Rana et al., 2021; Djahel et al.,
2015; Gade, 2019; Bhardwaj et al., 2022)). The aim
of smart traffic monitoring systems is to automatically
collect data that are then used to facilitate other use-
cases, such as traffic management or city planning.
There are many different ways in which a TMS can
be built. The kind of data that it records depends, in
part, on that architecture (Rana et al., 2021). Exam-
ples include systems based on digital image process-
ing (DIP) (Krishnamoorthy and Manickam, 2018),
vehicle-to-X networks (Du et al., 2015), or probe ve-
hicles (Feng et al., 2014). DIP-based approaches do
not require any cooperation from the vehicles and
are thus compatible with existing vehicle technology.
Combined with license-plate recognition (LPR) (Jain
et al., 2019; Du et al., 2013), they offer the possibil-
ity to track vehicles through a city and build statistics
from these data.
Privacy is a particular concern when LPR is used.
First, the license plate clearly is a piece of personally
identifiable information (PII) — unlike, for example,
a birds-view snapshot of a busy intersection. Second,
indiscriminate scanning of license plates is difficult to
base on explicit consent (which is relatively straight-
forward to do when using vehicle-to-X networks, for
a
https://orcid.org/0009-0003-0291-3911
instance). As a result, solutions relying on LPR usu-
ally employ some form of pseudo-anonymization (see
e.g. (Gao et al., 2019)). An obivous idea is to replace
the license plate by an opaque, pseudo-random ID for
each vehicle, and use it to correlate individual loca-
tions at a central (e.g. cloud) service. Using pseudo-
random IDs in this way is a relatively straightforward
technique that is simple to implement. Augmenting
with differential privacy (Dwork et al., 2006) is possi-
ble (Gelderie. et al., 2024). Yet its security properties
are not fully understood (more details below).
We study the question: “What information can be
inferred from the anonymized data collected in this
way, if the attacker has prior knowledge on the traffic
patterns?” More specifically, we study this question
in two settings: In its most basic nature, the data is
simply anonymized and transmitted to a server. We
call this the anonymization scenario. This scenario
corresponds to what we have observed in commer-
cial products and literature (see below for details).
By contrast, the differential privacy scenario consid-
ers the case where the obfuscated data that reaches
the server satisfies the requirements of differential pri-
vacy. Our main contribution is a precise information
theoretic treatment of these scenarios.
In the anonymization scenario, we ask: Can the
server de-anonymize the data given prior knowledge
about a victim’s route preferences? This is the well-
known de-anonymization attack. Given an opaque ID
and the route which it travels (both are part of the
data-set such a server consumes as part of its opera-
tion), we show that an adversarial server learns infor-
798
Gelderie, M.
On the Privacy Afforded by Opaque Identifiers in Traffic Monitoring.
DOI: 10.5220/0012833200003767
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 21st International Conference on Security and Cryptography (SECRYPT 2024), pages 798-803
ISBN: 978-989-758-709-2; ISSN: 2184-7711
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

mation inversely proportional to the routes popularity
(the expected number of cars on it).
In the differential privacy scenario, the server sees
data that is anonymized and subjected to randomized
noise. In accordance with the typical definition of dif-
ferential privacy, the server receives a given data set
with roughly equal probability regardless of whether
some specific individual drove along some route or
not. We ask: What can the server ascertain about
the probability of a specific individual driving along
a given route under these circumstances, given that
the server has prior knowledge about the overall traf-
fic patterns (i.e. the underlying probability distribu-
tion). We show that an attacker can infer information
about a target vehicle, if said vehicle shows a strong
preference for a specific route. Since this is a fairly
common situation, the privacy of individuals is at in-
creased risk, even if differential privacy is guaranteed.
The importance of prior knowledge in studying
privacy is well known. Indeed, the definition of dif-
ferential privacy is intended to quantify privacy by ex-
cluding prior knowledge from the equation (see again
(Dwork et al., 2014)). While a sensible approach, in
practice prior knowledge needs to be taken into ac-
count when the de-facto privacy of a system is to be
quantified. We think that our results show that sim-
ply anonymizing data and adding differential privacy
does not sufficiently protect users under all circum-
stances. Care must be taken to restrict monitoring to
sufficiently popular routes. We hope this paper can
serve as a first step in studying the actual privacy guar-
antees that can be offered to a travel participant by
modern license plate monitoring systems in practice.
In related work, the area of traffic monitoring is a
wide field and only a subset of the existing research is
pertinent to this paper. Generally, traffic monitoring
systems fall into three categories (Jain et al., 2019):
i) in situ (e.g. sensors embedded into the road sur-
face) ii) vehicular (e.g. probe vehicles or vehicular
networks) iii) digital image processing (DIP). Of par-
ticular relevance to this paper is the third category.
Again there are many works on DIP based systems,
e.g. (Du et al., 2013; Baran et al., 2014; Krishnamoor-
thy and Manickam, 2018; Bisio et al., 2022). Alto-
gether, these prior works highlight the relevance of
analyzing and addressing gaps in privacy guarantees
offered by proposed anonymization techniques.
Differential Privacy (DP) was introduced by
Dwork, Nissim, McSherry, and Smith in (Dwork
et al., 2006; Dwork, 2006). DP has since seen sus-
tained and intensive research activity, resulting in a
slew of research studying various application domains
(more below). Of general interest are observations on
the limits of DP, particularly if the adversary is as-
sumed to have prior knowledge (Dwork et al., 2014).
Some works on DP investigate continual release
of statistics that are built from streams of events
(Dwork et al., 2010; Shi et al., 2011; Kellaris et al.,
2014; Chan et al., 2011; Jain et al., 2023). Those
works lay algorithmic foundations and provide lower
bounds on the noise that is required to achieve DP.
In particular, some works study the aggregation of
statistics from multiply locations or agents, e.g. (Cheu
et al., 2019; Corrigan-Gibbs and Boneh, 2017; Chan
et al., 2012). One important aspect of these works is
that they classify DP algorithms as either working in a
central model or a local model. In the central model,
DP is implemented by a trusted party (the curator)
that sees all data-points in the clear. This curator then
outputs a perturbed version of this statistic that meets
the definition of DP. In the local model, on the other
hand, one ensures that even subsets of agents involved
in the collection of data (so-called coalitions) see only
DP data. In particular, they usually ensure that the cu-
rator sees only a perturbed version of the raw data.
While the decentralized nature and focus on time-
series data considered in these works is relevant to
traffic monitoring, their focus is on algorithmic foun-
dations and security guarantees in the context of DP.
Prior knowledge of an adversary is not taken into ac-
count and, in some cases (e.g. smart metering) would
be different from the use-case of traffic monitoring.
Many papers have tackled the problem of privacy
in traffic monitoring from a solutions perspective (e.g.
(Li et al., 2018; Qu et al., 2019; Sun et al., 2021;
Gelderie. et al., 2024)). Those papers typically pro-
pose a specific privacy measure and analyze its se-
curity in the underlying model. For example, works
with a focus on differential privacy (Gelderie. et al.,
2024; Sun et al., 2021) prove that the definition of DP
is satisfied. But by itself, DP says very little about
the situation when an attacker has prior knowledge.
Unfortunately, in traffic monitoring it is particularly
easy for the attacker to acquire at least partial knowl-
edge about the probabilities of certain traffic patterns
(e.g. via products like Google Maps or because many
cities publish such data). We must assume that the ad-
versary has intimate knowledge of the overall traffic
movement patterns and their probability distribution.
In this vein, there are efforts quantifying privacy
loss (Gao et al., 2019). Gao et. al. study the privacy
of LPR in a somewhat similar setting to ours. Their
study is of an empirical nature and is based on a large
LPR dataset. We seek to augment these results by
performing a systematic mathematical analysis in the
framework of information theory.
A related line of research is concerned with the
privacy of vehicle data, such as trajectory information
On the Privacy Afforded by Opaque Identifiers in Traffic Monitoring
799
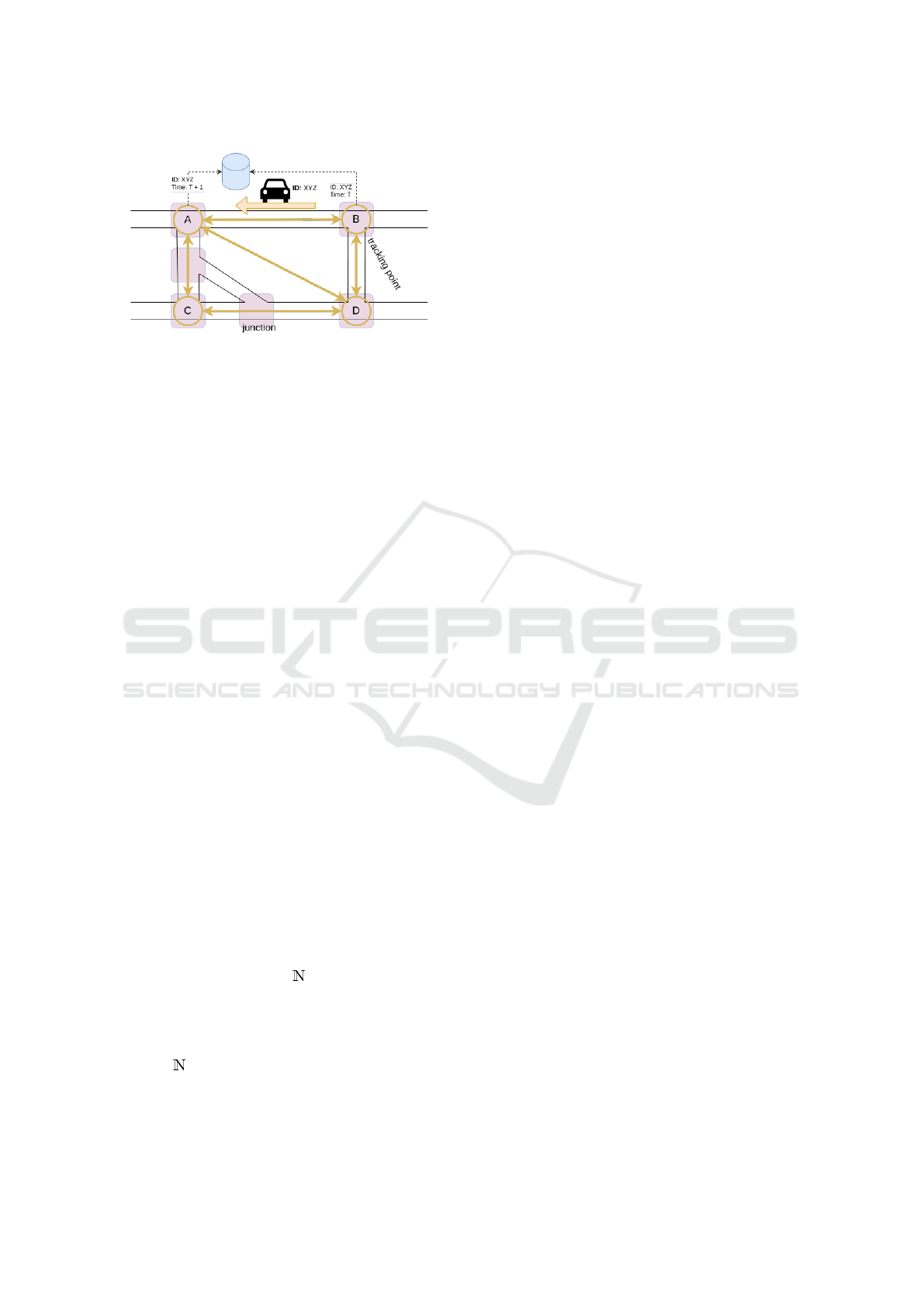
Figure 1: Architecture Overview.
(Ma et al., 2019; Zhou et al., 2018). In these works,
the vehicles themselves actively participate in the data
gathering. This means that those architectures have a
wealth of privacy enhancing options at their disposal
that cannot be easily ported to LPR settings.
In the larger context of smart cities, even more
related works on privacy exist (e.g. (Husnoo et al.,
2021; Hassan et al., 2019; Yao et al., 2023; Qu et al.,
2019; Gracias et al., 2023)). The field is very diverse,
but we are not aware of any works that investigate the
effect of prior knowledge on the privacy afforded by
license plate obfuscation or similar use-cases.
2 BACKGROUND
In the following, it is assumed that each vehicle is
equipped with a unique and readable license plate
l from some finite set L that is recorded at certain
points in the city. We call such locations tracking
points (TPs). At each TP, a camera, or group of cam-
eras, will record the license plate of every vehicle that
passes by. This is depicted in fig. 1. TPs (depicted
as circles) reside alongside roads, usually junctions
(depicted as gray boxes). They report data to a statis-
tics server (depicted in blue), which builds a central
statistic about the number of vehicles per route.
The set V of all tracking points forms a directed
graph G = (V,E), defined by the rule that (v,v
′
) ∈ E
whenever v
′
can be reached from v without visit-
ing a tracking point in between. We call G the city
graph. Let G = (V,E) be the city graph as described
above. We define the set of routes as R = {v
1
···v
l
|
(v
i
,v
i+1
) ∈ E, 1 ≤ i < l,l ∈ }. As shown in fig. 1,
two TPs can be neighbors in G, even if they are not
directly connected by some road. This suggests an
accuracy trade-off, which we leave for future work.
The statistic server computes the target statistic
S : R →
0
, which simply counts cars on a given
route. The statistic S is implicitly a function of time:
S(r) can vary over time for each r ∈ R . In this paper
we study snapshots of S at some unspecified, yet fixed
point in time t. Notably, all probability distributions
that are studied depend on t. The fact that we consider
snapshots is no limitation: The attacker’s advantage is
then simply the maximum over her per-time-step ad-
vantages.
The information about the traffic statistic at pre-
vious times is relevant to an attacker: The victim
might be known to normally drive route r
1
during
rush hours, but divert to r
2
if a certain intersection is
congested. In that situation, knowing whether or not
said intersection was congested 20 minutes ago has
an impact on the adversaries knowledge on the situ-
ation right now. However, the analysis conducted in
this paper extends to situations where an attacker has
knowledge about the last T time-steps for some fixed
T . It merely affects the probability of vehicles collid-
ing on IDs (see below).
The reports to the central server can expose li-
cense plate data to a central location. As a result, one
usually anonymizes this data in some way. A typical
strategy is to replace the license plate with some ran-
dom identifier. Here, TPs transmits an opaque ID to
the server instead of the license plate. As long as the
same vehicle is always assigned the same opaque ID,
the server can compute the same statistic. We do not
consider how to implement such an assignment. In-
stead, we assume that there exists a binding of IDs,
drawn from a set U to license plates.
We assume this mapping of license plates to IDs is
temporary: Each time an ID is assigned, this binding
has a time to live (TTL) T . The TTL determines for
how many hops a license plate is tracked. In particu-
lar, the routes r ∈ R that will be recorded have length
at most T . Because of this, we will (abusing notation)
assume that R consists only of sequences of length at
most T and is, in particular, finite.
The anonymization provided by the use of opaque
IDs hinges on the assumption that the binding
B: L → U is not known to an adversary. We say B is
secure, if B(l) is a uniform random variable for each
l ∈ L and B(l) is independent of B(l
′
) for all l ̸= l
′
.
Note that our security notion does not take the im-
plementation of such a binding into account. We fo-
cus purely on the stochastic properties of the binding
itself and leave an investigation of the various techni-
cal options and cryptographic security notions of se-
cure bindings to future work.
3 OBFUSCATION ONLY
We now state formal privacy guarantees that are af-
forded by TMS using randomized bindings as out-
SECRYPT 2024 - 21st International Conference on Security and Cryptography
800

lined in section 2. Our main statement in theorem 2 is
reminiscent of the well-known notions from cryptog-
raphy. Of note is the role the expected value of cars
per roads plays in the privacy that the system affords.
In this section, we assume opaque identifiers are
chosen from the set U =
λ
, where λ ∈ is a se-
curity parameter. We assume secure bindings, as de-
fined above. However, we first study an idealized set-
ting, where we assume that collisions on IDs do not
occur: U
l
̸= U
l
′
for all l ̸= l
′
. Such a binding is nei-
ther practical, not secure in our sense (the variables U
l
are clearly not independent). We subsequently lift the
result to the general case in theorem 2.
For notational convenience, we write [·] for events
defined by some function on the output of one or
more random variables. For example, if X
1
,...,X
n
are
random variables with identical range, we may write
[∃i ̸= j : X
i
̸= X
j
] for the event that not all X
i
are equal.
We first study an idealized setting and assume that
IDs are assigned via an injective function f : L → U
that is chosen uniformly at random. Write F =
{ f : U → L | f injective}. We choose f
∗
← F uni-
formly and assign to each l ∈ L the ID f
∗
(l). We use
a random variable U
l
= f
∗
(l) for l ∈ L.
We use some additional random variables for no-
tational convenience. Let l ∈ L and write R
l
for the
random variable that assigns a route to l. If l does not
currently drive at all, then R
l
and U
l
take the special
value ⊥ /∈ U ∪L. Finally, we write D = {l ∈ L | U
l
̸=
⊥} for the set of cars that drive.
Note that U
l
= f
∗
(l) is defined only if l drives,
although f
∗
(l) is always defined. This is because in
our model (see section 2), IDs are only assigned to
cars that drive. In that situation, U
l
and R
l
cannot
be independent. They are only conditionally indepen-
dent on the events “l drives”= [l ∈ D] or “l does not
drive”= [l /∈ D].
For u ∈ U, write R
u
= {w ∈ V
∗
|
w consistent with u} for the random variable that
denotes the set of all sequences that can be associated
with u. If u is not currently assigned to any license
plate, then R
u
=
/
0. If there is a collision on u, then
R
u
may contain more than one element (including
sequences of vertices that are not valid walks in
G). Since we assume, for the moment, that IDs are
assigned using an injective function f
∗
, R
u
is either
empty, or a singleton containing one valid route from
R ⊊ V
∗
. We therefore write R
u
= r whenever it is
ensured that R
u
is a singleton.
For r ∈ R , write N
r
= |{l ∈ L | R
l
= r}| for the
random variable denoting the number of vehicles on
route r. Note that we make no assumption about the
distribution of R
l
and U
l
. However, Pr[U
l
= u | l ∈
D] = Pr[ f
∗
(l) = u] = |U|
−1
= 2
−λ
.
Lemma 1. For every r ∈ R , u ∈ U and ev-
ery l ∈ L with Pr[R
u
= r] ̸= 0, it holds that
Pr[U
l
= u | R
u
= r] =
Pr[R
l
=r]
[N
r
]
, where the probabilities
are taken over the uniform choice of f
∗
← F and over
the randomness of R
l
.
This and all other proofs are omitted due to space
constraints, but can be found in the full version of this
paper (Gelderie, 2024).
The assumption that f
∗
is chosen uniformly from
the set F of all injective functions from L to U is,
of course, impractical. It is more natural to chose
on u ∈ U per l ∈ L uniformly at random (as is done
whenever we work with Variant 2, Version 4 UUIDs,
for example).
If we draw IDs from the set U =
λ
uniformly
at random, we may deal with collisions. This case
can be dealt with in the usual way using well-known
Birthday Paradox probability bounds. This is the con-
tent of the theorem below.
In the following, we recall that R
u
⊆ V
∗
is defined
to be the set of all sequences of vertices that are con-
sistent with u ∈ U. This set can now contain more
than one element.
Theorem 2. Let λ ∈ . For every r ∈ R , u ∈ U and
every l ∈ L with Pr[r ∈ R
u
] ̸= 0 it holds that
Pr[U
l
= u | r ∈ R
u
] −
Pr[R
l
= r]
[N
r
]
≤
|L|
2
2
λ
where the probabilities are taken over U
l
and R
l
.
This result formalizes the intuitive notion that
driving anonymously along a very popular route does
not leak much information about the vehicle l. Con-
versely, if the route is unpopular, then the system
leaks information consistent with the probability of
vehicle l driving that route. In particular, we capture
intuitively obvious observations, such as: If vehicle
l is parked at a remote location every night, then the
expected number of cars on all routes leading to that
location is close to 1. In this event the driver can be
de-anonymized: Pr[R
l
′
= r] ≈ 0 for all l
′
̸= l.
4 OBFUSCATION & DP
It is well-known (see e.g. (Dwork et al., 2014)) that
the security guarantees afforded by DP make no state-
ment about the knowledge an adversary might draw
from prior knowledge. If a traffic monitoring system
provides (ε,δ)-DP, this just says that any two possi-
ble adjacent inputs produce the same output with al-
most equal probability. But of course, those two adja-
cent inputs could reasonably have very different prior
On the Privacy Afforded by Opaque Identifiers in Traffic Monitoring
801

probabilities, meaning that an attacker can infer sig-
nificantly more information about the nature of the
input from observing the output than one might rea-
sonably expect from the notion of DP.
We recall the definition of differential privacy
(Dwork et al., 2006; Dwork, 2006). Note that ad-
jacency has not yet been defined; we give a use-case
specific definition below.
Definition 1. Let ε, δ > 0. Let M be a randomized
algorithm. Then M is said to have (ε,δ)-differential
privacy, if for all adjacent inputs x,x
′
∈ dom(M ) and
all subsets S ⊆ range(M ) it holds that Pr[M (x) ∈ S] ≤
exp(ε) · Pr[M (x
′
) ∈ S] + δ. The algorithms A is re-
ferred to as the curator.
In this section, we investigate the effect that an
(ε,δ)-DP curator M has on the conclusions an adver-
sary can rationally draw from the observed outputs.
Recall that we assign routes to vehicles via the ran-
dom variable R
l
∈ R ⊎ {⊥} for each l ∈ L, where
R
l
= ⊥ means that the vehicle with license plate l is
not driving at all.
First, we introduce some notation. In what fol-
lows, it is convenient to interpret ⊥ as just another
route. We define
ˆ
R = R ⊎ {⊥}. We denote by
X = (R
l
)
l∈L
the random vector that assigns a route
(or ⊥) to every vehicle. Clearly X is a complete rep-
resentation of the input to a curator in the central DP
model. We recognize values of x of X as functions
x : L →
ˆ
R . Write X =
ˆ
R
L
for the set of all possible
values X might take on. Note that since L and R are
finite (the latter because of the length-bound enforced
by the TTL), the set X is also finite. Let p : X → [0, 1]
the distribution of X.
To reason about DP, we need to clarify adjacency
in our context: Let l ∈ L and let x,x
′
∈ X. We call x
and x
′
a-adjacent (or simply adjacent), if x(s) = x
′
(s)
for all s ̸= l, and x
′
(l) ̸= x(l). We write x ▷◁
l
x
′
.
Recall that the information content of x is defined
as I(x)
def
= −log(p(x)). We can now define:
Definition 2 (Preference Gap). Let l ∈ L and r ∈
ˆ
R .
The quantity σ(l, r) = sup
x∈A
r
sup
x
′
▷◁
l
x
I(x
′
) − I(x) is
called the preference gap of l and r. The quantity
σ(l) = sup
r∈
ˆ
R
σ(l, r) is called the preference gap of l.
With the convention that exp(∞) = ∞, we have:
Theorem 3. Let M be an (ε,δ)-DP curator on X.
For every l ∈ L, r ∈
ˆ
R and y ∈ range(M ) with
Pr[Y = y] > 0 it holds that: Pr[R
l
= r | Y = y] ≤
(exp(ε)Pr[R
l
̸= r | Y = y] +
δ
Pr[Y =y]
) · exp(σ(l))
If Pr[R
l
= r] ̸= 0, then: Pr[R
l
̸= r | Y = y] ≤ |R | ·
(exp(ε)Pr[R
l
= r | Y = y] +
δ
Pr[Y =y]
) · exp(σ(l)).
5 CONCLUSION
We have considered traffic monitoring using
anonymized license plates. In this context, we have
studied the question, how prior knowledge about
the overall probability distributions of the general
driving behavior or individual participants affects
the privacy guarantees of such traffic monitoring
systems. We extended this study to systems that
provide differential privacy.
When no DP is involved, the knowledge an adver-
sary has about the probabilities of individual driving
behavior can greatly increase the confidence in un-
masking attacks, where an adversary tries to identify
the individual behind a certain opaque ID. Specifi-
cally, if the route in question is very unpopular, the
risk of unmasking is high.
We then studied how the guarantees of DP, stated
in terms of neighboring data-sets, generalize to guar-
antees about the likelihood of a particular individual
driving on a certain route. We found that the uneven-
ness of the underlying probability distribution of traf-
fic patterns can degrade the assurances made by the
DP mechanism significantly.
An interesting open question for future work is to
what extent the picture changes when the adversary
has only partial knowledge of the probability distri-
butions involved. For instance, an adversary may have
information about the probability of a given number
of vehicles per route at a given time, but not the prob-
abilities of individual vehicles being on that route.
ACKNOWLEDGEMENTS
This work was done as part of a project funded by
the German Federal Office for Information Security
under project funding reference number 01MO23006.
REFERENCES
Baran, R., Ru
´
s
´
c, T., and Rychlik, M. (2014). A smart cam-
era for traffic surveillance. In Multimedia Communi-
cations, Services and Security: 7th International Con-
ference, pages 1–15. Springer.
Bhardwaj, V., Rasamsetti, Y., and Valsan, V. (2022). Traffic
control system for smart city using image processing.
AI and IoT for Smart City applications, pages 83–99.
Bisio, I., Garibotto, C., Haleem, H., Lavagetto, F., and Scia-
rrone, A. (2022). A systematic review of drone based
road traffic monitoring system. IEEE Access, 10.
Biswas, S. P., Roy, P., Patra, N., Mukherjee, A., and Dey, N.
(2016). Intelligent traffic monitoring system. In Proc.
o. 2nd Intl. Conf. on Computer and Communication
Technologies, pages 535–545. Springer.
SECRYPT 2024 - 21st International Conference on Security and Cryptography
802

Chan, T.-H. H., Shi, E., and Song, D. (2011). Private and
continual release of statistics. ACM Transactions on
Information and System Security, 14(3):1–24.
Chan, T.-H. H., Shi, E., Song, D., and Song, D. (2012).
Optimal lower bound for differentially private multi-
party aggregation. Embedded Systems and Applica-
tions.
Cheu, A., Smith, A., Ullman, J., Zeber, D., and Zhilyaev,
M. (2019). Distributed differential privacy via shuf-
fling. In 38th Annual International Conference on
the Theory and Applications of Cryptographic Tech-
niques, pages 375–403. Springer.
Corrigan-Gibbs, H. and Boneh, D. (2017). Prio: Private, ro-
bust, and scalable computation of aggregate statistics.
In 14th USENIX symposium on networked systems de-
sign and implementation, pages 259–282.
Djahel, S., Doolan, R., Muntean, G.-M., and Murphy, J.
(2015). A communications-oriented perspective on
traffic management systems for smart cities: Chal-
lenges and innovative approaches. IEEE Communi-
cations Surveys & Tutorials, 17(1):125–151.
Du, R., Chen, C., Yang, B., Lu, N., Guan, X., and Shen, X.
(2015). Effective urban traffic monitoring by vehicu-
lar sensor networks. IEEE Transactions on Vehicular
Technology, 64(1):273–286.
Du, S., Ibrahim, M., Shehata, M., and Badawy, W. (2013).
Automatic license plate recognition (alpr): A state-
of-the-art review. IEEE Transactions on Circuits and
Systems for Video Technology, 23(2):311–325.
Dwork, C. (2006). Differential privacy. In International col-
loquium on automata, languages, and programming,
pages 1–12. Springer.
Dwork, C., McSherry, F., Nissim, K., and Smith, A. (2006).
Calibrating noise to sensitivity in private data analysis.
In Theory of Cryptography, pages 265–284. Springer.
Dwork, C., Naor, M., Pitassi, T., and Rothblum, G. N.
(2010). Differential privacy under continual observa-
tion. In Proceedings of the 42nd ACM Symposium on
Theory of Computing, page 715–724.
Dwork, C., Roth, A., et al. (2014). The algorithmic founda-
tions of differential privacy. Foundations and Trends®
in Theoretical Computer Science, 9(3–4):211–407.
Feng, Y., Hourdos, J., and Davis, G. A. (2014). Probe
vehicle based real-time traffic monitoring on urban
roadways. Transportation Research Part C: Emerg-
ing Technologies, 40:160–178.
Gade, D. (2019). Ict based smart traffic management sys-
tem “ismart” for smart cities. International Journal of
Recent Technology and Engineering, 8(3):1000–1006.
Gao, J., Sun, L., and Cai, M. (2019). Quantifying privacy
vulnerability of individual mobility traces: A case
study of license plate recognition data. Transportation
Research Part C: Emerging Technologies, 104:78–94.
Gelderie, M. (2024). On the privacy afforded by
opaque identifiers in traffic monitoring (extended ver-
sion). https://www.hs-aalen.de/uploads/publication/
file/11363/opaque ident ext.pdf.
Gelderie., M., Luff., M., and Brodschelm., L. (2024). Dif-
ferential privacy for distributed traffic monitoring in
smart cities. In Proceedings of the 10th International
Conference on Information Systems Security and Pri-
vacy, pages 758–765.
Gracias, J. S., Parnell, G. S., Specking, E., Pohl, E. A., and
Buchanan, R. (2023). Smart cities—a structured liter-
ature review. Smart Cities, 6(4):1719–1743.
Hassan, M. U., Rehmani, M. H., and Chen, J. (2019). Dif-
ferential privacy techniques for cyber physical sys-
tems: a survey. IEEE Communications Surveys & Tu-
torials, 22(1):746–789.
Husnoo, M. A., Anwar, A., Chakrabortty, R. K., Doss, R.,
and Ryan, M. J. (2021). Differential privacy for iot-
enabled critical infrastructure: A comprehensive sur-
vey. IEEE Access, 9:153276–153304.
Jain, N. K., Saini, R., and Mittal, P. (2019). A review
on traffic monitoring system techniques. Soft com-
puting: Theories and applications: Proceedings of
SoCTA 2017, pages 569–577.
Jain, P., Raskhodnikova, S., Sivakumar, S., and Smith, A.
(2023). The price of differential privacy under contin-
ual observation. In International Conference on Ma-
chine Learning, pages 14654–14678. PMLR.
Kellaris, G., Papadopoulos, S., Xiao, X., and Papadias, D.
(2014). Differentially private event sequences over in-
finite streams. Proceedings of the VLDB Endowment,
7(12):1155–1166.
Krishnamoorthy, R. and Manickam, S. (2018). Automated
traffic monitoring using image vision. In 2018 Sec-
ond International Conference on Inventive Commu-
nication and Computational Technologies (ICICCT),
pages 741–745.
Li, Y., Zhang, P., and Wang, Y. (2018). The location privacy
protection of electric vehicles with differential privacy
in v2g networks. Energies, 11(10):2625.
Ma, Z., Zhang, T., Liu, X., Li, X., and Ren, K. (2019). Real-
time privacy-preserving data release over vehicle tra-
jectory. IEEE transactions on vehicular technology,
68(8):8091–8102.
Qu, Y., Nosouhi, M. R., Cui, L., and Yu, S. (2019). Privacy
preservation in smart cities. In Smart cities cyberse-
curity and privacy, pages 75–88. Elsevier.
Rana, S., Rana, S., Garg, U., Garg, U., Gupta, N., and
Gupta, N. (2021). Intelligent traffic monitoring sys-
tem based on internet of things. 2021 International
Conference on Computational Performance Evalua-
tion (ComPE).
Shi, E., Chan, T.-H. H., Rieffel, E., Chow, R., and Song, D.
(2011). Privacy-preserving aggregation of time-series
data. In Proceedings of the 18th Annual Network &
Distributed System Security Symposium, volume 2.4.
Sun, Y.-E., Huang, H., Yang, W., Chen, S., and Du, Y.
(2021). Toward differential privacy for traffic mea-
surement in vehicular cyber-physical systems. IEEE
Transactions on Industrial Informatics, 18(6).
Yao, A., Li, G., Li, X., Jiang, F., Xu, J., and Liu, X. (2023).
Differential privacy in edge computing-based smart
city applications: Security issues, solutions and future
directions. Array, page 100293.
Zhou, Z., Qiao, Y., Zhu, L., Guan, J., Liu, Y., and Xu,
C. (2018). Differential privacy-guaranteed trajec-
tory community identification over vehicle ad-hoc net-
works. Internet Technology Letters, 1(3):e9.
On the Privacy Afforded by Opaque Identifiers in Traffic Monitoring
803
