
Graph-Based Modelling of Maximum Period Property
for Nonlinear Feedback Shift Registers
Eric Filiol
1,3
and Pierre Filiol
2
1
Thales Digital Factory, Thales Group, Paris, France
2
Lab-STICC, ENSTA Bretagne, Brest, France
3
ENSIBS, Vannes, France
Keywords:
NLFSR, Stream Cipher, Binary Sequence, Maximum Period, Graph Representation, Incidence Matrix.
Abstract:
NonLinear Feedback Shift Registers (NLFSRs) are key primitives to design pseudorandom generators in mod-
ern stream ciphers, especially when the feedback function is of low degree. Contrary to their linear counter-
parts (LFSRs) for which a general and comprehensive theory has been established, many fundamental prob-
lems related to NLFSRs remain open. In particular finding a systematic procedure of acceptable complexity
for constructing NLFSRs with a guaranteed long period is still a general open problem and only a few results
have been obtained so far. In this paper, we present the results of a exhaustive exploratory search and anal-
ysis of NLFSRs of low degree. We first model NLFSRs as graphs using their incidence matrix and express
the maximum period property as graph properties. This enables to reduce the number of possible candidates
greatly that can be tested finally for the maximum period property by HPC on GPGPUs and Massively Parallel
Processor Array (MPPA).
1 INTRODUCTION
Binary sequences produced by feedback shift regis-
ters (FSRs) are widely used in stream ciphers and ran-
dom generators. These registers are the key primitive
used in these cryptographic systems.
A binary n-stage feedback shift register is defined
as a mapping from F
n
2
to F
2
(x
n−1
,...,x
0
) 7→ ( f (x
n−1
,...,x
0
),x
n−1
,...,x
1
) (1)
where f is a Boolean function, called feedback func-
tion, F
2
denotes the binary field and F
n
2
the n-
dimensional vector space over F
2
consisting of the n-
tuples of elements of F
2
. Whenever f is a linear trans-
formation, we deal with a Linear Feedback Shift Reg-
ister (LFSR) otherwise ( f is nonlinear) with a Nonlin-
ear Feedback Shift Register (NLFSR). In this paper,
we focus on NLFSRs defined by a bijective mapping
(nonsingular mapping).
Consider a binary sequence σ = (σ
i
)
∞
i=0
. From the
n first fixed terms σ
0
,σ
1
,..., σ
n−1
(called the initial
state vector), we derived the register output sequence
uniquely defined by the recurrence relation for all i >
0:
σ
n+i
= f (σ
i
,σ
i+1
,...,σ
i+n−1
) (2)
If there exists an integer p > 0 such that σ
i+p
= σ
i
for all i ∈ F
n
2
\ {(0, 0, . . . , 0)} , the sequence is called
periodic of period p. The most desirable property for
NLFSRs (as well as for LFSRs) is to have a maximal
possible period length of 2
n
− 1. If we iterate f over
F
n
2
, we then have two cycles (see Figure 1): one of
length 1 (the loop over the single point (0, 0, . . . , 0)
and a cycle of length 2
n
− 1. In this case, NLFSRs
generate maximal length sequences or m-sequences
(Golomb, 1981).
From the cryptographic or random number gener-
ation perspective, it is strongly desirable that NLF-
SRs’ feedback function fulfils the following condi-
tions (Augustynowicz, 2018):
• The number of feedback function’s linear and
nonlinear terms should remain as small as possi-
ble. It is especially a desirable property for hard-
ware implementation (number of logic gates).
• The algebraic degree of the feedback function
should be the lowest possible (at least 2 however).
The goal is somehow that NLFSRs are as close as pos-
sible to all the main advantages of LFSRs such as low
power consumption, easy implementation and high
efficiency while providing a better resistance against
known attacks (Kuznetsov et al., 2022, page 5).
832
Filiol, E. and Filiol, P.
Graph-Based Modelling of Maximum Period Property for Nonlinear Feedback Shift Registers.
DOI: 10.5220/0012839300003767
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 21st International Conference on Security and Cryptography (SECRYPT 2024), pages 832-837
ISBN: 978-989-758-709-2; ISSN: 2184-7711
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

The paper hence focus on nonlinear feedback
functions whose Algebraic Normal Form (ANF) is
given by:
f (x
n−1
,...,x
0
) =
n−1
∑
i=0
c
i
.x
i
+ x
n
+ x
j
.x
k
(3)
for all possible pair j, k such that 0 < j, k < n and
where c
i
are binary coefficients describing whether
the register cell is considered (c
i
= 1) or not (c
i
= 0).
We have conducted an exhaustive exploratory anal-
ysis to find all feedback functions up to the degree
n = 28. To reduce the computing time it has been nec-
essary to find a new way of NLFSR modelling. For
that purpose, we represent NLFSR as directed graphs
whose incidence matrix exhibits specific properties to
express the maximal period property. It is worth men-
tioning that the present study can be easily applied to
any other forms of feedback polynomials (for instance
more quadratic terms).
It is the first exhaustive search to date whereas pre-
vious works only published a very few number of re-
sults due to the search complexity. From the results
obtained, we have identified a number of news re-
sults that can be of high interest to explore further for
n > 28.
In the rest of this article we will consider all oper-
ations in the finite field (F
2
,+,.).
The paper is organized as follows. Section 2 anal-
yses the overall complexity of searching of NLF-
SRs producing m-sequence and presents the related
works. Section 3 introduces our combinatorial model
for NLFSRs and formalizes the maximal period prop-
erty in terms of algebraic equations. Then Section 4
details the particular implementation aspects that have
been used to perform an effective computation. Fi-
nally Section 5 presents the detailed results of our
exhaustive search and identify a few new interesting
properties before concluding in Section 6.
2 PRELIMINARIES
2.1 Complexity Analysis of NLFSR
Search
To date, there are no theoretical results that allow to
easily find maximum period NLFSRs as is the case
for LFSRs (Golomb, 1981). In this section we look at
the approach currently being favoured in recent years.
Let us rewrite (3) in a more simple way:
f (x
n−1
,...,x
0
) = l(x
n−1
,...,x
0
) + x
j
.x
k
(4)
where l(x) = l(x
n−1
,...,x
0
) =
∑
n−1
i=0
c
i
.x
i
+ x
n
is the
linear part of f .
The search for such NLFSRs of length n can be
formalized according the two following steps:
1. Among the 2
n
possible candidates corresponding
l(x), for a given pair i, j fixing the degree-2 mono-
mial, we retain those which validate a certain
number of algebraic or combinatorial properties
I
1
,I
2
,...,I
k
. If these properties are independent,
with respective probabilities of being realized by
a good candidate P(I
i
) = p
i
, then at the end of this
stage we retain N = 2
n
.
∏
k
i=1
p
i
. This step has an
incompressible complexity of 2
n−1
(a symmetry
property presented in Section 2.3 enables to cut
search work in half).
2. For each valid candidate for l(x), we check
whether it is in the maximum period by calcu-
lating the cycle. Complexity is in 2
n
in the
worst case. The average complexity is 2
n−1
from
(Golomb, 1981, Corollary 11, p. 183). No result
is known for this step that would allow us to re-
duce this complexity (except in certain very spe-
cific cases, see (Golomb, 1981, Chapter VII)).
The overall worst-case complexity is therefore 2
2n−1
and the average-case complexity is 2
2n−2
. To reduce
this complexity, the focus must be on the first stage
to reduce the number of candidates to be tested in the
second stage. Some of these properties are already
known (see Section 2.3). In this paper we are going
to add many others thanks to results from graph the-
ory and matrix calculus on the associated incidence
matrix. This significantly reduces the overall com-
plexity of the exhaustive search. This has enabled us
to perform an exploratory analysis up to n = 28.
2.2 Related and Previous Work
Since the Jansen’s seminal thesis in 1989 (Jansen,
1989), the main approach for searching for NLFSRs
of the simplest form considers more or less sophisti-
cated exhaustive search. In (Dabrowski et al., 2014),
this approach has been initiated with parallel comput-
ing.
Later on in (Poluyanenko, 2017), the author stud-
ies NLFSRs implementation on FPGAs and discusses
issues of their optimization. Search method of NLF-
SRs generating M-sequence was given. It was based
on a practical synthesis and explores the possibility of
NLFSR implementation of FPGA.
In (Augustynowicz, 2018), the authors consider
a multi-stages hybrid algorithm which uses Graph-
ics Processor Units (GPU) and developed for process-
ing data-parallel throughput computation. They focus
and give results for feedback polynomials of the form
l(x) + x
i
.x
k
+ x
j
.x
l
(two quadratic monomials). Later
Graph-Based Modelling of Maximum Period Property for Nonlinear Feedback Shift Registers
833

the same authors (Augustynowicz and Kanciak, 2020)
optimize their search methods by applying particular
vector processor instructions. Their aim was to max-
imize the advantage of Single Instruction Multiple
Data (SIMD) and Single Instruction Multiple Threads
(SIMT) execution patterns. Their results are only par-
tial and contains errors (especially regarding the num-
ber of sparse feedback polynomials, see Section 5).
Finally in 2022, the authors of (Poluyanenko,
2017) have extended their results given in (Kuznetsov
et al., 2022), giving a bit more feedback polynomials.
Unfortunately only a very few number of results are
obtained due to the high computing complexity.
As a result, no exhaustive enumeration of max-
imum period NLFSR polynomials is yet available.
Such a result would perhaps allow to identify unsus-
pected properties which could help to find a general
theory of construction of these NLFSRs as is the case
for their linear counterparts (LFSRs). This is the aim
of the present article.
Studies considering exhaustive search all try to re-
duce the first step of search described in Section 2 by
using a very few number of algebraic properties sat-
isfied by the feedback coefficients a
i
. We recall them
in Section 2.3.
2.3 Known Algebraic Properties
Golomb (Golomb, 1981) in 1982 identifies a very im-
portant property that defines the condition for a shift
register cycle to be branchless. In other words, the
feedback function is bijective: each x has a unique
successor f (x) and any f (x) has a unique predecessor
(see Fig. 2).
Theorem 1. (Golomb, 1981) The cycles generated by
a feedback shift register have no branch points if and
only if its feedback function can be decomposed as
f (x
0
,...,x
n−l
) = x
0
+ g(x
l
,...,x
n−1
) (5)
It implies that any integer encoding the linear part
l(x) must be an odd value (monomial x
0
is always
present). Later on Chan, Game and Rushanan (Chan
et al., 1993) identified three more generic algebraic
properties.
• The Hamming weight of the integer encoding l(x)
is even (we add the bit corresponding to monomial
x
0
so c
0
= 1).
• The Hamming weight of the integer encoding l(x)
must be at least equal to 2.
• If x
0
+ g(x
l
,...,x
n−1
) generates a quadratic m-
sequence, then x
0
+ g(x
n−1
,...,x
1
) generates a
quadratic m-sequence as well. Then we can di-
vide the search over half the pairs {i, j} defining
the degree 2 monomial in Equation 4. Each time
we have a solution, we generate the conjugate so-
lution for replacing all indices i by n − i in Equa-
tion 4.
In the next section, we present how to have more sta-
tistically independent such equations for a larger re-
duction.
3 NLFSR AND GRAPH
INCIDENCE MATRIX
Modelling NLFSRs using graph incidence matrices
was first mentioned by Gonzalo, Ferrero and Sori-
ano (Gonzalo et al., 2002) in a rather imprecise and
succinct manner. No results were given. No analysis
of the independence of potential equations was pre-
sented. The computational and algorithmic aspects
were not discussed, even though they are fundamental
as soon as n > 10. Indeed, the size of the matrix grows
exponentially with n, which limits their approach to
small values of n. Our work is based on their ap-
proach, which we have effectively implemented and
optimised.
3.1 Combinatorial Model for NLFSR
Let us consider a NLFSR of size n whose feed-
back polynomial has the general form f (x) = x
n
+
∑
n−1
i=0
c
i
.x
i
+ x
j
.x
k
for 0 < j, k < n. For each possible
pair { j, k} we search for all n-uples (c
0
,...,c
n−1
) for
which the NLFSR fulfils the maximum period prop-
erty. We can model any NLFSR by a directed graph
of 2
n
points. Any maximal period NLFSR more pre-
cisely is a (2
n
,2
n
)-graph with two cycles: one cycle
of length 1 (loop on the null point) and one cycle of
length 2
n−1
.
To illustrate our approach, let us consider the feed-
back function x
4
+ x
2
+ x
1
+ x
0
+ x
1
.x
2
denoted for
short as 0, 1, 2, (1, 2). Fig. 1 describes the two cor-
responding cycles.
Figure 1: Graph for 0, 1, 2,(1,2).
To simplify notations for i = (i
n−1
,...,i
1
,i
0
) ∈
SECRYPT 2024 - 21st International Conference on Security and Cryptography
834

F
n
2
let us note
~
i
0
= (0,i
n−1
, . . . , i
1
) and
~
i
1
=
(1,i
n−1
,...,i
1
) the right-shifted versions i whose
most significant bit is updated respectively with 0 and
1. This notation describes the state of an NLFSR,
which changes from state i to state
~
i
0
or
~
i
1
depending
on the feedback value f (i) of the NLFSR calculated
on state i.
Let us consider its incidence matrix whose entries
are expressed as linear polynomials in the unknown c
i
as follows: ∀i = (i
n−1
,i
n−2
,...,i
1
,i
0
) ∈ F
n
2
then f (i)
equals 0 or 1 and hence produce either
~
i
0
or
~
i
1
de-
pending on the values of coefficients c
i
. We can then
define the formal incidence matrix A = [a
i, j
] where i
and j are in F
n
2
∀i ∈ F
n
2
\ {(0,0,...,0)}
a
i,
~
i
0
= 1 + f (i)
a
i,
~
i
1
= f (i)
(6)
For instance let us consider the formal feedback poly-
nomials f (x) = x
4
+c3.x
3
+c
2
.x
2
+c
1
.x
1
+c
0
+x
1
.x
2
and i = (0,1,1,1). We have a
i,
~
i
1
= c
2
+ c
1
and a
i,
~
i
0
=
1 + c
2
+ c
1
. If we consider the formal feedback poly-
nomial f
0
(x) = x
3
+c
2
.x
2
+c
1
.x
1
+x
0
+x
1
.x
2
, the cor-
responding formal incidence matrix of order 2
n
−1 =
7 is given in (7).
It is important to note that for i = (0,0,1) and
i
0
= (1, 1, 1) have only one possible successor if we
want the cycle to have maximal period (respectively
~
i
1
and
~
i
0
1
. Recall also from Theorem 1 that c
0
= 1. We
can observe that the sum of matrix entries linewise
is always equal to 1 as well as columnwise (in fact
c
0
= 1).
3.2 Formalisation of Max-Period
Property
The Max-Period property can be expressed in differ-
ent ways (see Figure 1).
It is a well known result that each entry a
k
i, j
of
a power matrix A
k
describes the number of paths of
length k between i and j (Brouwer and Haemers,
2012). If we want a NLFSR be in maximal period
then there must be no loop (a
k
i,i
= 0) and there must
exist a unique path between between i and j (refer to
Fig. 2) for any value of k ≥ 1.
Exploiting this formalisation efficiently requires
to manage two issues:
• A complexity issue. If almost all matrix computa-
tion have polynomial complexity, the actual com-
plexity is exponential since the size of the matrix
is in O(2
n
). We then need to find ways of manag-
ing this explosion in complexity.
• The different equations have to be statistically
independent in order to minimize their number.
Optimally n statistically independent equations
should drastically reduce the number of suitable
candidates at the end of the first step of the ex-
haustive search.
To obtain several independent algebraic equations
while limiting the computing effort, we calculated
the successive powers A
2
,A
4
,A
8
...,A
2
k
of the inci-
dence matrix A. The results confirm that this approach
does indeed yield statistically independent equations.
The probability for a candidate to satisfy all of diag-
onal equations is indeed
1
2
k
. By restricting ourselves
to k ≤
n
4
, the computational effort remains moderate
while guaranteeing a very significant reduction in the
first stage of the exhaustive search described in Sec-
tion 2. It is worth noting that the statistical indepen-
dence of the diagonal equations obtained is compliant
with the fact that the cycle-length distribution is flat
(Golomb, 1981, Section 2.2). We have evaluated the
statistical independence of these additional equations
and we have observed that they are always satisfied
if the diagonal equation is. So they do not bring any
new bit of information. It means that each squaring
iteration provides only one significant equation.
4 COMPUTATIONAL APPROACH
Modelling the maximum-period NLFSR search prob-
lem using graphs means that their incidence matrices
are square matrices of size N = 2
n
−1. As far as naive
matrix multiplication is concerned, the computation
of the diagonal equations is of cubic complexity but
the size of the data is of exponential complexity in
2
n−1
. It is therefore not possible to compute the ma-
trix products directly (naive product of matrices) as
soon as n > 18.
However these matrices are extremely sparse. The
initial matrix defined in Equation 7 has 2
n+1
− 4 en-
tries out of 2
2n
− 2
n+1
+ 1 possible entries. The ma-
trix sparsity is asymptotically defined by S (A) =
1
2
n−1
when n → ∞.
We used a specific compact matrix representation.
There are several possible forms of representation and
we have opted for the form described in Table 1. The
matrix entries are not integer or real values, but for-
mal polynomials whose maximum number of mono-
mials is 2
2
n
. This maximum number is never reached
in practice (for small values of k), which means that
effective calculations can be carried out with limited
memory requirements. This form consists of storing
the (i, j) coordinates of the only non-zero inputs, to-
gether with their polynomials. We give this represen-
tation for the matrix (7) and in its general expression
in Table 1.
Graph-Based Modelling of Maximum Period Property for Nonlinear Feedback Shift Registers
835

A =
0 0 0 c
0
0 0 0
1 + c
1
0 0 0 c
1
0 0
1 + c
0
+ c
1
0 0 0 c
0
+ c
1
0 0
0 1 + c
2
0 0 0 c
2
0
0 c
0
+ c
2
+ 1 0 0 0 c
0
+ c
2
0
0 0 c
1
+ c
2
0 0 0 1 + c
1
+ c
2
0 0 c
0
+ c
1
+ c
2
0 0 0 0
(7)
Table 1: Compact Representation of (7) (left) - General
Case (right).
1 4 c
0
2 1 1 + c
1
2 5 c
1
3 1 1 + c
0
+ c
1
3 5 c
0
+ c
1
4 2 1 + c
2
4 6 c
2
5 2 c
0
+ c
2
+ 1
5 6 c
0
+ c
2
6 3 c
1
+ c
2
6 7 1 + c
1
+ c
2
7 3 c
0
+ c
1
+ c
2
. . . . . . . . .
i
~
i
0
. . .
i
~
i
1
. . .
i + 1
~
(i + 1)
0
. . .
i + 1
~
(i + 1)
1
. . .
. . . . . . . . .
This form of matrix product computation is fast,
efficient and optimizes memory resources. The algo-
rithm is described in Table 1. Note that for clarity of
presentation, the form described in Table 1 has been
implemented a bit differently so as to allow direct ac-
cess to the various items without having to use local
search in the table (thus eliminating tests).
Data: Matrix A of size N
Result: Compute A
2
Allocate result table MatRes of size 2.N;
for x from 1 to N do
/* For nonzero entries of A */;
/* Coord. (i, j) & polynomial */;
i = A[x][1]
j = A[x][2]
p
x
= A[i][3]
for all y such that A[y][1] == j do
/* Nonzero entries ( j, k) */
p
y
= A[ j][y];
MatRes[i][A[y][2]]+ = p
x
∗ p
y
;
end
end
Return MatRes;
Algorithm 1: Fast Large Sparse Matrix Square Algo-
rithm.
It is worth noting a few important points:
• Since the number of entries for the second For
loop is constant, the overall complexity is that of
main loop. Hence the overall complexity is in
O(N). However, for the initial matrix we have
N = 2
n
− 1. The number of non zero matrix en-
tries roughly doubles with each squaring. So after
k squaring, the number of non zero entries is 2
k
.N.
• At the end of the squaring procedure, the result
matrix MatRes is already ordered according to
matrix line indices i. There is consequently no
need of an additional sorting step.
5 RESULTS AND DISCUSSION
5.1 Results
We have applied our method to search exhaustively
all NLFSRs with feedback polynomials of the form
given by (3). Until now we have completed this
search up to n = 27 (for n = 28 search is in progress).
For small value of n (n ≤ 20), we also performed a
naive exhaustive search in order to validate our alge-
braic approach by comparing both results obtained.
Our approach has been fully confirmed.
This research work required four months of com-
puting on an AMD Ryzen 32/64-core Linux machine
with 256 Mb of RAM and equipped with a Kalray
256-core Massively Parallel Processor Array (MPPA)
and a Nvidia RTX 2080 Ti GPGPU. We did not par-
allelize Algorithm 1, preferring to run threads on the
different pairs (i, j) for the monomial x
i
.x
j
.
Table 2 presents the definitive results for 15 ≤
n ≤ 26. The (i, j) rate describes the proportion of
pairs {i, j} for which at least one solution has been
found. The minimal weight of l(x) is of high im-
portance since they provide the most simple form
for hardware implementation while maintaining ex-
cellent non-linearity for cryptographic designs.
5.2 Analysis of Results
This exhaustive research enabled us first to compare
our results with the few published ones. While the
solutions we found systematically included and con-
firmed the few solutions already published, we were
SECRYPT 2024 - 21st International Conference on Security and Cryptography
836
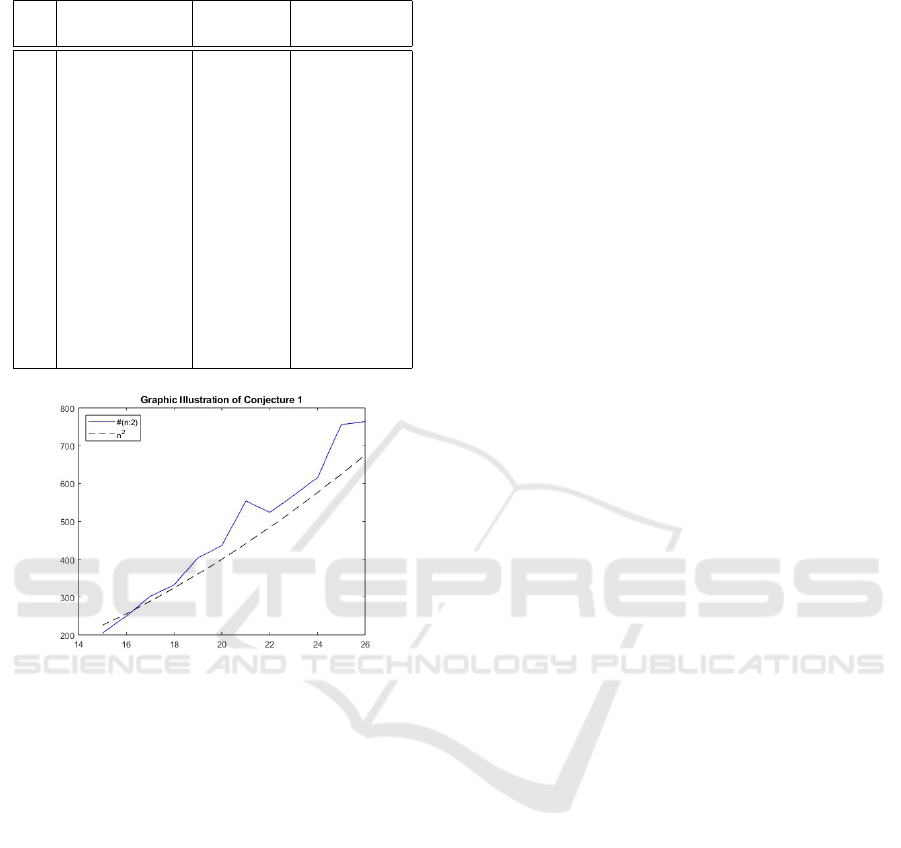
Table 2: Results of Exhaustive Search.
n # polynomials (i, j) rate Min. weight
of l(x)
15 204 0.7821 3
16 250 0.9428 3
17 302 0.9083 5
18 332 0.8235 5
19 404 0.8627 3
20 436 0.8596 5
21 554 0.8947 5
22 524 0.8666 5
23 568 0.8268 5
24 616 0.8650 5
25 756 0.8731 7
26 764 0.8933 7
27 737 0.8615 7
28 > 120 > 0.3418 ≤ 7
Figure 2: Graphic Illustration of Conjecture 1.
able to disprove certain results. For instance Au-
gustynowicz and K. Kanciak (Augustynowicz and
Kanciak, 2020, p. 21, Table VII) claim that no feed-
back polynomials of weight 7 does exist for n = 26
and n = 27 while we have found several ones. For
instance n = 27 x
0
+ x
1
+ x
2
+ x
3
+ x
7
+ x
10
+ x
18
+
x
6
.x
14
. A number of other of their results are also in-
complete or wrong.
We have also initiated an in-depth analysis of the
results to identify some interesting properties. For ex-
ample, the number of solutions varies significantly ac-
cording to the respective parities of the indices i and
j of the monomial x
i
.x
j
.
Finally we can formulate the following conjecture
concerning the number of polynomials as a function
of n.
Conjecture 1. The number of feedback polynomials
of the form (3), denoted #(n : 2), is in O(n
2
).
This Conjecture is illustrated in Figure 2.
6 CONCLUSION
In this paper we have presented how combinatorial
modelling of an NLFSR via the incidence matrix of
the state graph can help to significantly reduce the
computational effort in the exhaustive search for feed-
back polynomials. This enabled us to carry out this
search up to n ≤ 28 for a minimal form that is very
important in the design of encryption algorithms.
This exhaustive search will be carried out for
n > 28. However, memory requirements quite
soon exceeds current capacities (n = 31 requires a
machine with 1Tb RAM). We are therefore con-
sidering emulating RAM with disk space and use
MapReduce-type functions on Distributed File Sys-
tems (DFS) (Leskovec et al., 2014, Chap. 2). The
computation time will be longer, but this is of relative
importance for an exhaustive one-time search (once
and for all search).
REFERENCES
Augustynowicz, P. (2018). Scalable method of searching
for full-period nonlinear feedback shift registers with
gpgpu. new list of maximum period nlfsrs. Inter-
national Journal of Electronics and Telecommunica-
tions, 64.
Augustynowicz, P. and Kanciak, K. (2020). The search
of square m-sequences with maximum period via gpu
and cpu. Infocommunications Journal, XI:17.
Brouwer, A. E. and Haemers, W. H. (2012). Spectra of
Graphs. New York, NY
Chan, A. H., Games, R. A., and Rushanan, J. J. (1993). On
quadratic m-sequences. In Fast Software Encryption,
Cambridge Security Workshop, page 166–173, Berlin,
Heidelberg. Springer-Verlag.
Dabrowski, P., Labuzek, G., Rachwalik, T., and Szmidt, J.
(2014). Searching for nonlinear feedback shift reg-
isters with parallel computing. Inf. Process. Lett.,
114(5):268–272.
Golomb, S. W. (1981). Shift Register Sequences. Aegean
Park Press, USA.
Gonzalo, R. P., Ferrero, D., and Soriano, M. (2002). Non-
linear feedback shift registers with maximum period.
Jansen, C. (1989). Investigations on Nonlinear Streamci-
pher Systems: Construction and Evaluation Methods.
PhD thesis, TU Delft.
Kuznetsov, A., Potii, O., Poluyanenko, N., Gorbenko, Y.,
and Kryvinska, N. (2022). Stream Ciphers in Modern
Real-time IT Systems: Analysis, Design and Compar-
ative Studies.
Leskovec, J., Rajaraman, A., and Ullman, J. D. (2014). Min-
ing of Massive Datasets. Cambridge University Press,
USA, 2nd edition.
Poluyanenko, N. (2017). Development of the search method
for nonlinear shift registers using hardware, imple-
mented on field programmable gate arrays. EUREKA:
Physics and Engineering, 1:53–60.
Graph-Based Modelling of Maximum Period Property for Nonlinear Feedback Shift Registers
837
