
Integrating SysML and Timed Reo for Modeling Interactions in
Cyber-Physical Systems Components
Perla Tannoury and Ahmed Hammad
FEMTO-ST Institute, CNRS, University of Bourgogne Franche-Comt
´
e, Besanc¸on, France
Keywords:
CPS, Specifications, Structural Modeling, SysML, Timed Reo, Timed SysReo.
Abstract:
Modeling Cyber-Physical Systems (CPS) with timing constraints remains a challenge due to the complex be-
haviors of their interconnected components that operate in a physical environment. In this paper, we introduce
“Timed SysReo”, a novel incremental design methodology that integrates SysML and Timed Reo for modeling
CPS architectures and timed interaction protocols during the design phase. We first define the meta-models to
formalize CPS model architecture and to detail timed connections between its components. Then, we propose
to precise the meta-model with Object Constraint Language (OCL), that imposes rules to be respected in order
to ensure consistency between timed models in our incremental design approach. Finally, we demonstrate our
approach through an example of the Smart Medical Bed (SMB) system.
1 INTRODUCTION
Cyber-Physical Systems (CPSs) consist of both soft-
ware and physical elements that interact continuously
with each other (Kim and Kumar, 2012). They are
used in diverse domains such as healthcare, smart
cities, and autonomous vehicles (Tartarisco et al.,
2024; Barroso et al., 2023).
Efficient CPS modeling is crucial for verifying
functionality before implementation, especially in
critical domains. However, incorporating timing con-
straints adds complexity and risks. Errors in these
models can be particularly risky in sectors like emer-
gency response and medical applications.
Various languages are used in CPS modeling
(Mallet, 2015; Bouskela et al., 2022; Genius and
Apvrille, 2023). We chose SysML (Hause et al.,
2006) for its ability to model heterogeneous sys-
tems, which is widely employed in industrial applica-
tions. However, CPS components interact with tim-
ing constraints, leading to complex behaviors. While
SysML enhances stakeholder understanding through
its graphical representation, it may not fully capture
and verify these intricate timed interactions.
Timed Reo (Arbab et al., 2007), an extension of
Reo (Arbab, 2004), is crucial for managing complex
system protocols, especially in CPS where timing is
critical. It enables precise determination of data flow
timing between component ports, ensuring compli-
ance with essential timing constraints. This simpli-
fies system design, aids validation, and ensures inter-
operability within specified time frames, addressing
SysML’s limitations. Timed Reo also offers a formal
representation of timed coordination among compo-
nents, facilitating system property analysis, and its
graphical representation enhances usability. How-
ever, its complexity and limited adoption compared
to SysML may pose challenges for stakeholders in un-
derstanding its implementation.
To date, there is no comprehensive study integrat-
ing SysML and Timed Reo in CPS modeling. Previ-
ous research has mainly focused on SysML (Huang
et al., 2018; Xie et al., 2021) or Timed Reo (Arbab
et al., 2007; Kokash et al., 2013) separately. Re-
cently in (Tannoury, 2022; Tannoury et al., 2022;
Tannoury et al., 2023), “SysReo”, a domain-specific
language (DSL) combining SysML with Reo, was
introduced to enhance CPS validation and verifica-
tion. While “SysReo” effectively models CPS re-
quirements, structure, and behavior, it struggles with
handling timing constraints.
In this paper, we introduce “Timed SysReo”, a
novel incremental design methodology that integrates
SysML and Timed Reo for modeling CPS architec-
tures and timed interaction protocols during the de-
sign phase. Our methodology involves decompos-
ing complex CPSs into manageable levels, initially
establishing an abstract model that is iteratively re-
fined while ensuring consistency. Initially, an abstract
model is defined and progressively refined while en-
Tannoury, P. and Hammad, A.
Integrating SysML and Timed Reo for Modeling Interactions in Cyber-Physical Systems Components.
DOI: 10.5220/0012854100003753
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Conference on Software Technologies (ICSOFT 2024), pages 477-484
ISBN: 978-989-758-706-1; ISSN: 2184-2833
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
477

suring consistency throughout. The Timed SysReo
framework adopts the hierarchical structure diagram
from SysReo’s Extended SysML Block Definition
Diagram (ExtBDD) to represent the CPS structure.
Unlike SysReo, Timed SysReo focuses on model-
ing the internal structure and interaction protocols of
CPS components, accommodating timing constraints
which SysReo cannot handle. Our contribution intro-
duces the Timed Reo Internal Block Diagram (Timed
Reo IBD) to represent the internal structure and timed
interaction protocols of CPS components, enhancing
clarity, particularly in critical CPS scenarios requir-
ing precise timing. Timed SysReo comprises three
primary diagrams for CPS modeling: (1) the require-
ment diagram for capturing CPS needs, including
functional and non-functional requirements, (2) the
ExtBDD diagram for representing CPS hierarchical
structure, and (3) the Timed Reo IBD diagram for
modeling CPS inner architecture and timed interac-
tion protocols. In this work, we define the Timed Sys-
Reo language and present its meta-models. Addition-
ally, we establish OCL constraints on the Timed Reo
IBD model to enhance precision. Our methodology
aims to address challenges in designing medical CPSs
by systematically expressing timed interaction proto-
cols at each design level. Finally, we demonstrate our
approach through a Smart Medical Bed (SMB) exam-
ple.
The paper is organized as follows. Section 2 pro-
vides a brief overview of SysML, Timed Reo, and Ob-
ject Constraint Language (OCL). Section 3 describes
the proposed modeling approach using Timed Sys-
Reo models. Section 4 presents our example of the
SMB (Smart Medical Bed) system using Timed Sys-
Reo models. Finally, Section 5 concludes the paper
while briefly discussing future work.
2 BACKGROUND
This section offers a succinct overview of SysML,
Timed Reo, and Object Constraint Language (OCL).
2.1 SysML in a Nutshell
The System Modeling Language (SysML) (Hause
et al., 2006) facilitates modeling heterogeneous com-
plex systems across diverse industries. It aligns the
input from different stakeholders to maintain consis-
tency and uphold superior design standards. Main-
tained by the Object Management Group (OMG)
(Delligatti, 2013), SysML comprises nine diagram
types used to model the requirement, structure, and
behavior of CPS. In the context of Smart Medical Bed
(SMB) system modeling, our focus lies on require-
ment, block definition, and internal-block diagrams.
Below, we outline the SysML concepts relevant to
these diagrams, essential for modeling the SMB sys-
tem effectively.
The Requirement Diagram (RD): delineates the
system requirements anticipated by users. It illus-
trates the relationship between requirements and other
model elements that either “satisfy” or “verify” them.
This diagram provides a modeling framework for
text-based requirements.
The Block Definition Diagram (BDD): is a struc-
tural diagram that visually represents system compo-
nents using blocks. It depicts relationships between
these blocks and their hierarchical structure. Two
types of blocks are distinguished: Atomic and com-
posite blocks. Each block comprises a name, val-
ues, properties, referenced blocks, components, op-
erations, and constraints. Ports located on the sides
facilitate communication with the system. Blocks
can represent tangible or conceptual entities like hard-
ware, software, physical objects, and abstract entities.
The Internal Block Diagram (IBD): is a structural
diagram that represents the static state of the system.
It comprises sub-blocks detailing the internal arrange-
ment of the system. These sub-blocks interact via
properties, parts, connectors, ports, and interfaces, fa-
cilitating various interactions such as state transitions,
software operations, input/output flows, and continu-
ous interactions.
2.2 Timed Reo
Before Timed Reo, Reo (Arbab, 2004) served as a
channel-based coordination language for concurrent
and distributed systems. Reo constructs complex con-
nectors using basic channels to regulate communica-
tion in CPS, with these connectors being exogenous
and combinable. Constraint Automata (CA) (Baier
et al., 2006) formally represent and analyze Reo, cap-
turing behavior and data flow.
Timed Reo expands upon Reo by introducing
channels with timing constraints, which include timed
channels for timeouts and delays (Arbab et al., 2004;
Arbab et al., 2007). Its primary aim is to spec-
ify exogenous protocols governing timed interactions
among components in concurrent applications. Ad-
ditionally, Timed Reo’s formal semantics are cap-
tured by Timed Constraint Automata (TCA), extend-
ing Constraint Automata (CA) to describe behavior
incorporating timing constraints. TCA feature two
types of transitions: internal changes of locations
driven by time constraints and transitions represent-
ing synchronized input/output operations at ports.
ICSOFT 2024 - 19th International Conference on Software Technologies
478
Definition of TCA: A TCA A = (L, L
0
, N, →, C, ic)
is composed of:
• L: set of locations (or states).
• L
0
: initial location where L
0
∈ L.
• N: set of port names.
• →: transition relation →⊆ L × 2
N
× DC ×CC ×
2
C
× L, where DC is the set of Data Constraints
(DC) over a finite data domain. DC is a condition
that must be met for data to be exchanged between
two components. For example, DC can be used
to implement a filter pattern that only allows cer-
tain types of data to be exchanged, or they can be
used to implement a synchronization pattern that
ensures that two components exchange data in a
specific order. CC is a clock constraint.
• C: set of clocks.
• ic : L → CC is a function that assigns to any loca-
tion L an invariance condition ic(L).
2.3 OCL
The Object Constraint Language (OCL) (Cabot and
Gogolla, 2012) serves as a general-purpose formal
language enhancing UML and SysML models. Its
main purpose is to precisely specify constraints, fill-
ing a gap where graphical notations may lack clarity
and conciseness.
3 MODELING APPROACH USING
TIMED SYSREO
In this section, we outline our model-based design
methodology. First, we detail the incremental CPS
design process using Timed SysReo. Then, we define
and refine the meta-models employed in this process
using OCL.
3.1 Approach Steps
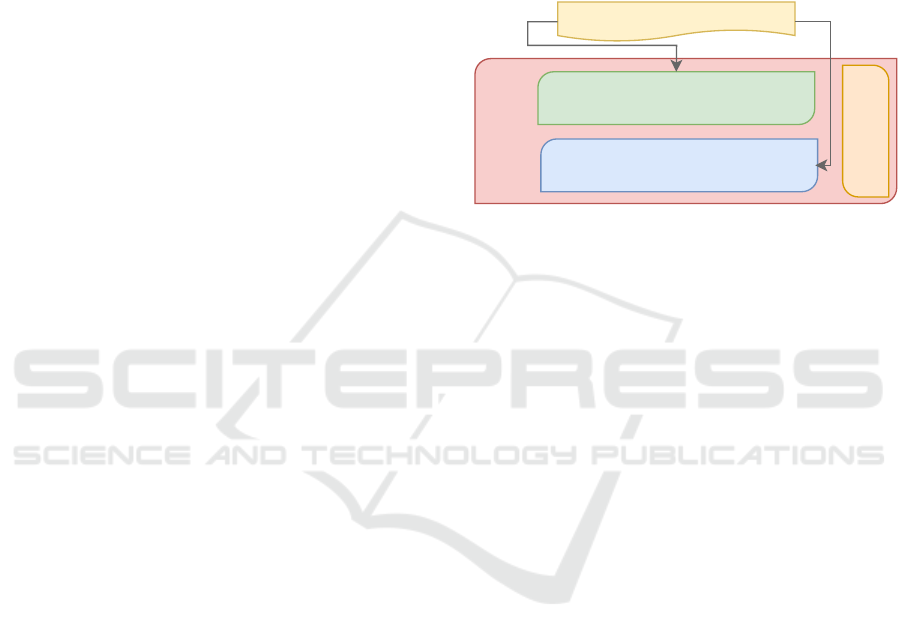
We outline our modeling approach in Figure 1. Ini-
tially, the modeler specifies a Requirement Diagram
(RD) to analyze and organize CPS requirements. The
subsequent phase focuses on defining CPS architec-
ture, wherein system components are delineated as
blocks using ExtBDD. In the third phase, an incre-
mental approach is employed, starting with an ab-
stract specification of the global internal system using
Timed Reo IBD. This specification evolves gradually
by selecting components that adhere to constraints de-
fined in the abstract specification. Notably, Timed
Reo IBD can incorporate timing constraints critical
for modeling CPS. Failure to model timing accurately
in CPS can result in life-threatening situations such
as medication errors, vehicle accidents, aviation inci-
dents, and industrial disasters. The fourth phase in-
volves linking the requirement diagram to ExtBDD
and Timed Reo IBD. Finally, our OCL rules are ap-
plied to ExtBDD and Timed Reo IBD to refine and
specify the abstract diagrams, ensuring consistency in
Timed SysReo models.
Requirements Diagram
Timed SysReo
Extended Block Definition
Diagrams (ExtBDD)
Timed Reo Internal Block
Diagram (Timed Reo IBD)
OCL
Link
(requirement/model)
Link
(requirement/model)
Figure 1: Modeling approach based on Timed SysReo.
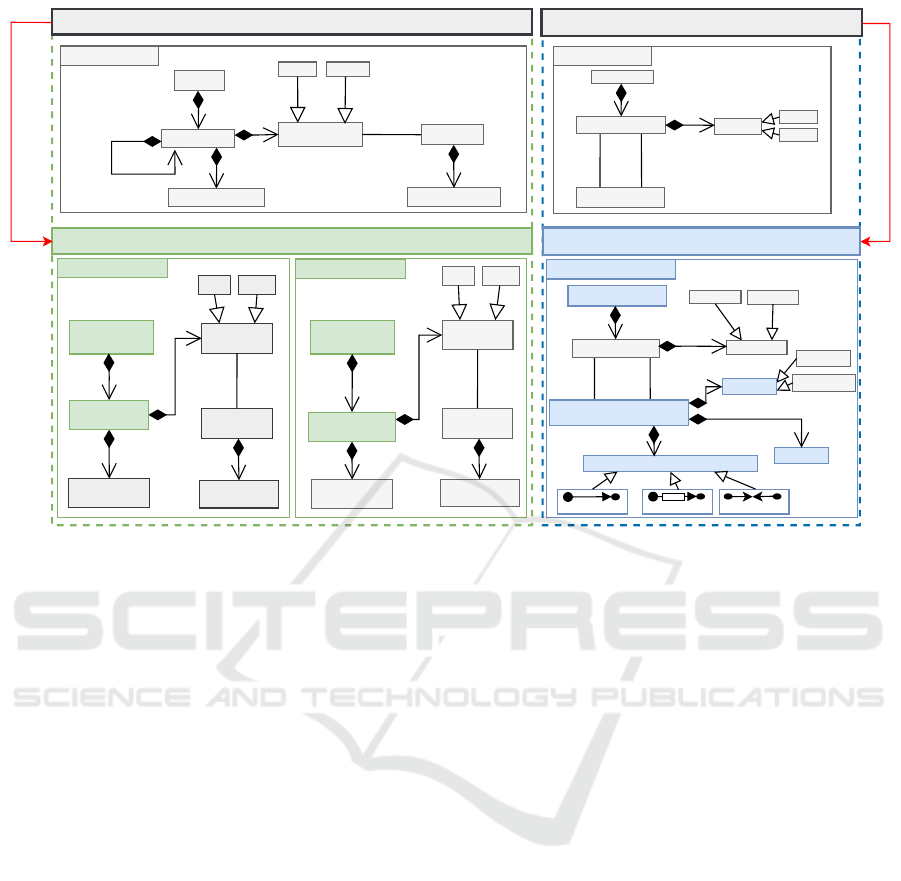
3.2 Timed SysReo Meta-Models
In Figure 2, we represent the process of transform-
ing the SysML Block Definition Diagram (BDD)
and Internal Block Diagram (IBD) into Timed Sys-
Reo Extended Block Definition Diagram (ExtBDD)
and Timed Reo Internal Block Diagram (Timed Reo
IBD), respectively. The transformation consists of
two parts:
1. The transformation of SysML Block Definition
Diagram (BDD) into Timed SysReo Extended
Block Definition Diagram (ExtBDD) involves us-
ing SysML BDD meta-models and splitting the
CPS hierarchy into two levels. The first level
represents the abstract model of CPS, with pri-
mary components as main blocks, and the sec-
ond level depicts concrete components as sub-
blocks. ExtBDD provides a more detailed view
of the system structure compared to traditional
SysML BDD, aiding in managing system com-
plexity and ensuring design alignment with re-
quirements. Additionally, ExtBDD meta-model
comprises blocks containing proxy ports and in-
ternal operations, facilitating the translation of op-
erations into functions representing system behav-
ior.
2. The conversion of SysML Internal Block Diagram
(IBD) into Timed Reo Internal Block Diagram
(Timed Reo IBD) entails employing SysML IBD
meta-models and replacing IBD connectors with
“Timed connectors”. These Timed connectors en-
able explicit representation of component inter-
Integrating SysML and Timed Reo for Modeling Interactions in Cyber-Physical Systems Components
479
IBD
Connectors
source
target
1
1
Parts
1..*
1..*
P in
P out
1..*
2..*
Ports
operations
ProxyPort interface
P in P out
BDD
1..*
0..*
Block
operations
0..*
1 1
2
1..*
subblock
pp
pp
op
int
op
SysML BDD SysML IBD
operations
ProxyPort
interface
P in P out
ExtBDD
1..*
0..*
0..*
1
1
2 .. *
pp
pp
op
int
op
operations
Main
Block(s)
1) Abstract Level
operations
ProxyPort
interface
P in P out
ExtBDD
0..*
0..* 0..*
1
1
2 .. *
pp
pp
op
int
op
operations
SubBlock(s)
2) Concrete Level
SysML BDD
ExtBDD
A-1)
A-2)
SysML IBD
Timed Reo IBD
B-1)
B-2)
1) Transformation of SysML BDD into
ExtBDD
2) Transformation of SysML IBD into
Timed Reo IBD
Timed Reo IBD
Timed Reo Connectors
source
target
1 1
Parts
1..*
1..*
P in P out
1..* 2..*
Ports
Timed Reo IBD
Node In
Node Out
Nodes
2
Channels
FIFO
Clock
0..1
1..*
syncDrain
sync
Figure 2: From SysML diagrams to Timed SysReo diagrams.
nal composition and timed interaction protocols,
thereby enhancing system reliability, safety, and
performance. Moreover, Timed Reo connectors
possess formal semantics, ensuring precision and
verifiability through formal methods, which ulti-
mately improves reliability and reduces develop-
ment time and costs. The Timed Reo IBD meta-
model, extending from ExtBDD, aims to repre-
sent the internal structure of CPS components and
their timed connections across various parts of the
system. It encompasses components such as Parts,
Ports, and Timed Reo connectors. These con-
nectors offer a range of functionalities to control
data flow effectively. For instance, the Sync chan-
nel promptly transfers data from input to output,
while FIFO temporarily stores data before trans-
mitting it. SyncDrain, on the other hand, receives
data from two sources simultaneously, discarding
it thereafter. The Filter channel selectively for-
wards data only when specific conditions are met.
Additionally, Timed Reo connectors feature nodes
facilitating data exchange between system com-
ponents. They also incorporate clocks to moni-
tor time intervals, enabling the system to manage
timeouts or delays efficiently.
In summary, “Timed SysReo” offers a more com-
prehensive and adaptable approach to system design,
which results in more effective and reliable CPS. The
use of ExtBDD provides a more precise and detailed
hierarchical view of the system, while Timed Reo
IBD allows for explicit modeling of the internal com-
position of the system and the timed interaction pro-
tocols among its components.
3.3 OCL on Timed SysReo
Meta-Models
To formalize constraints on Timed SysReo meta-
models, we used predefined OCL rules to precise the
latter. These rules should be respected by CPS de-
signers in order to insure consistency in Timed Sys-
Reo models.
The OCL constraints for ExtBDD meta-model
(see Figure 2A-2) in Table 1 ensure the integrity of its
structure. The first constraint mandates that every op-
eration within a Block must also exist in its subblocks,
maintaining consistency across levels of detail. The
second constraint requires each Block to have at least
two Proxy Ports, ensuring input and output function-
ality. These constraints guarantee the reliability and
completeness of the model.
The OCL constraints for Timed Reo IBD meta-
model (see Figure 2B-2) in Table 2 ensure the com-
pleteness and consistency of the model. The first con-
straint is used to differentiate parts by names. The
second one mandates that each Part must have at least
one input and one output Port, essential for data ex-
change. Lastly, the third constraint specifies that a
ICSOFT 2024 - 19th International Conference on Software Technologies
480
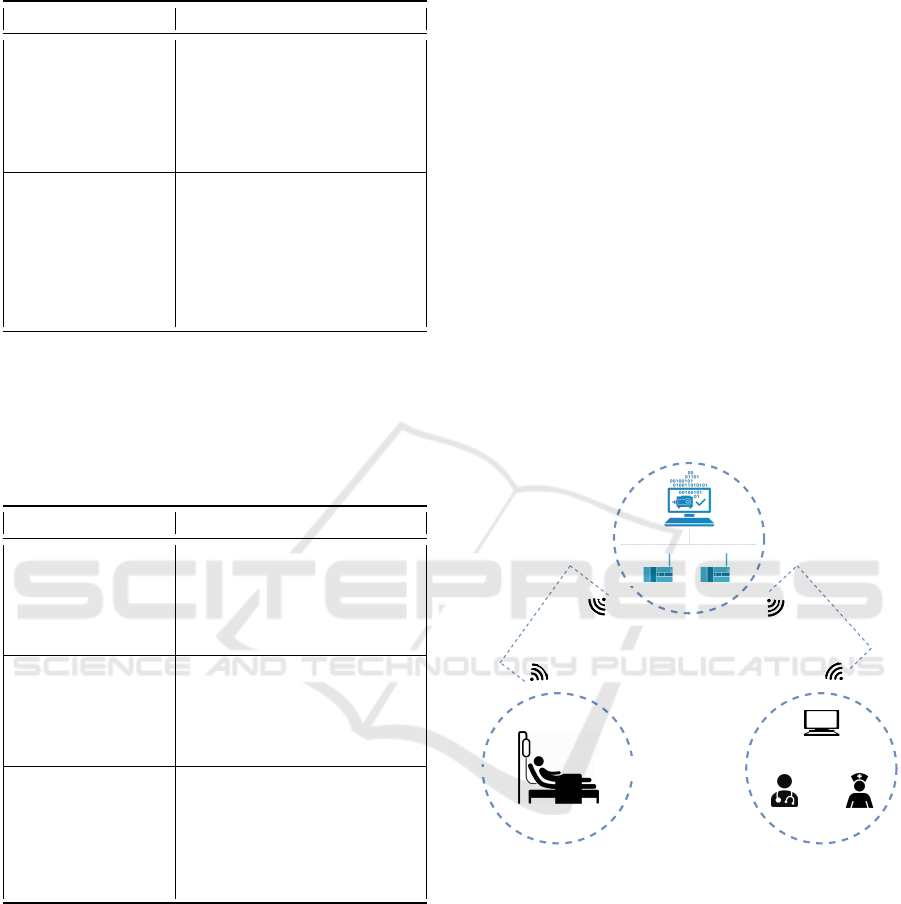
Table 1: OCL Well-formedness constraints of ExtBDD.
Description OCL Constraints
1) Operation
within a Block
must be present
in the set of op-
erations of its
subblocks.
context Block inv:
self.pp.int.op->
forAll (p:op implies p
in self.subblock.pp.
int.op)
2) Block should
contain a mini-
mum of two Proxy
Ports, encompass-
ing both input and
output functionali-
ties.
context Block inv :
Block.proxyport.pin->
size()≥ 1 and
Block.proxyport.pout->
size()≥ 1
Timed Reo connector can have either one clock or
none, ensuring consistent timing behavior. These con-
straints collectively maintain the accuracy and relia-
bility of the Timed Reo IBD model.
Table 2: OCL Well-formedness constraints of Timed Reo
IBD.
Description OCL Constraints
1) Part needs to
be distinguishable
from other blocks
by name
context Parts inv :
Parts.AllInstances()
->forAll (p1, p2 | p1
<> p2 implies p1.name
<> p2.name)
2) Parts must have
at least two ex-
ternal Ports (input,
output)
context Parts inv:
Parts.Ports.pin->size()
≥ 1 and
Parts.Ports.pout->
size() ≥ 1
3) Timed Reo con-
nector can have
only one clock or
none
context
TimedReoConnector inv:
TimedReoConnector
.clock->size() = 0
or TimedReoConnector
.clock->size() = 1
4 SMART MEDICAL BED (SMB)
EXAMPLE
In this section, we present our example of the Smart
Medical Bed (SMB) system. First, we begin by
briefly introducing the SMB system. Subsequently,
we collect information about the SMB system and an-
alyze it using our Timed SysReo models. This pro-
cess involves specifying the system’s requirements,
designing its structure, internal composition and inter-
action protocol while considering timing constraints.
4.1 SMB Overview
The Smart Medical Bed (SMB) integrates various
sensors to monitor patient vital signs, with a focus on
temperature sensing. Data from the temperature sen-
sor is transmitted to a Remote Terminal Unit (RTU)
within a latency period of 1 Time Unit (TU). The RTU
facilitates seamless data communication between the
Smart Bed (SB) and the Nursing Station (NS), ana-
lyzing data and promptly alerting healthcare staff if
abnormalities are detected, all within a latency period
not exceeding 3 TUs. The SMB system consists of
three main components: SB, RTU, and NS, each play-
ing a vital role in patient monitoring and communica-
tion.
Our study focuses on modeling and validating
the requirements, structure, and timed interaction
protocol of the SB and RTU within the SMB sys-
tem. Leveraging the Timed SysReo model-driven ap-
proach, we analyze system requirements and architect
the system while considering timing constraints.
Remote Terminal Unit
(RTU)
SMART BED
(SB)
Heart rate
Blood pressure
Temperature
Cough
Nursing Station
(NS)
Healthcare Team
Monitoring System
t1<=1
t2<=3
Figure 3: Smart medical bed architecture.
4.2 Modeling SMB with Timed SysReo
4.2.1 Requirements
During the modeling process, ensuring system func-
tionality and usability is paramount. The initial step
involves identifying specific system needs outlined in
the requirement diagram in Figure 4, which models
the SMB system’s functional requirements to ensure
smooth operation and user satisfaction.
For instance, requirement R1 underscores the
need for the SMB system to collect temperature data
Integrating SysML and Timed Reo for Modeling Interactions in Cyber-Physical Systems Components
481
from sensors within the Smart Bed and monitor pa-
tient vital signs to promptly respond to abnormalities.
This requirement is refined by R2 and R3. R2 man-
dates that the Smart Bed (SB) must transmit temper-
ature data to the Remote Terminal Unit (RTU) within
a maximum latency of 1 Time Unit (TU), satisfied by
the SB block. R3 highlights the RTU’s role in ana-
lyzing temperature data and taking prompt action, re-
quiring data processing within 3 TUs, either updating
patient info or alerting the healthcare team, satisfied
by the RTU block.
<<requirement>>
Data Collection and
Monitoring
ID ="R1."
Text = "The SMB
system shall collect
temperature data from
Smart Bed sensors and
monitor patient vitals for
timely intervention."
<<requirement>>
Data Transmission
ID ="R2"
Text = "The SB
shall transmit
temperature data to
the RTU within 1
TU latency."
<<refine>>
<<Block>>
SB
<<satisfy>>
<<refine>>
<<requirement>>
TS
data Transmission
ID ="R2.1"
Text = "The
temperature
sensor shall
transmit collected
data to the
gateway."
<<requirement>>
Gateway Transmission
ID ="R2.2"
Text = "The gateway
shall send
temperature data to
the MDB within 1 TU
latency."
<<Block>>
TS
<<satisfy>>
<<Block>>
Gateway
<<satisfy>>
<<requirement>>
Decision Making
ID ="R3"
Text = "The RTU
shall analyze
temperature data
then update patient
info or alert the
healthcare team
within 3 TU."
<<requirement>>
MDB Analysis
ID ="R3.1"
Text = "The MDB
shall analyze data
then update patient
info or alert
healthcare teams
within 3 TU."
<<Block>>
MDB
<<satisfy>>
<<requirement>>
Emergency
Alerts
ID ="R3.1.1"
Text = "The PA
shall receive the
emergency alert
message from
the MDB."
<<Block>>
PA
<<satisfy>>
<<requirement>>
Update Patient
Info
ID ="R3.1.2"
Text = "The PU
shall receive the
update patient
info message
from the MDB."
<<Block>>
PU
<<satisfy>>
<<refine>>
<<Block>>
RTU
<<satisfy>>
<<TimedReoIBD>>
sendTempData()
<<validate>>
<<TimedReoIBD>>
analyzedData()
<<validate>>
<<TimedReoIBD>>
updatePatientInfo()
<<validate>>
<<TimedReoIBD>>
emergencyAlerts()
<<validate>>
<<refine>>
Figure 4: The requirement diagram of the SMB system.
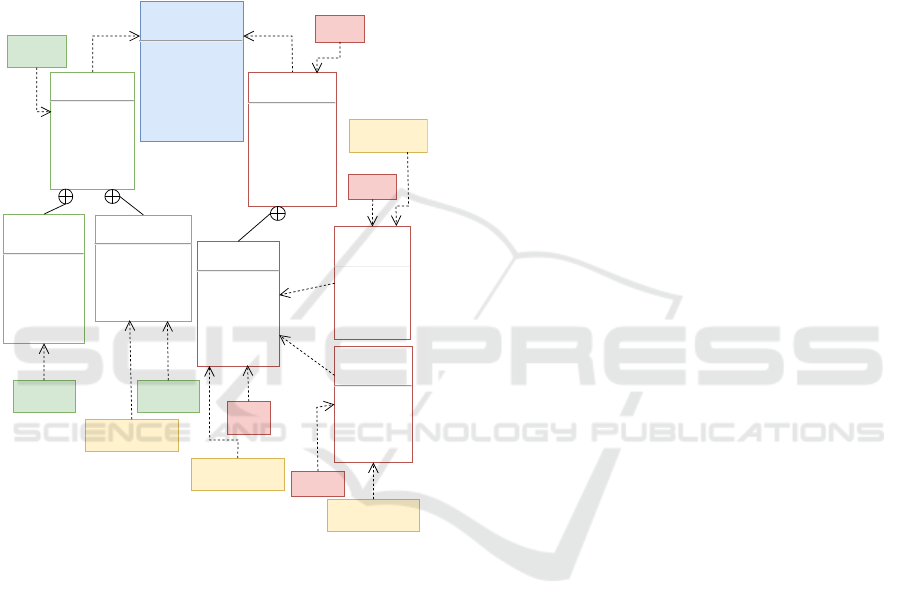
4.2.2 ExtBDD
The ExtBDD diagram illustrates the hierarchical
structure of the SMB system, with each component
from the requirement diagram (Figure 4) represented
as a block. These blocks detail a component’s inter-
nal operations as private operations and its required
and offered services. Each block includes two proxy
ports: an input port for available services and an out-
put port for required services.
In Figure 5 [A], the abstract overview of the sys-
tem is depicted, emphasizing main components such
as “SMB”, subdivided into Smart Bed (SB) and Re-
mote Terminal Unit (RTU), connected via composi-
tion.
Figure 5 [B] illustrates the concrete level of the
SMB system, showcasing sub-components within pri-
mary components. For example, the smart bed com-
ponent includes “Temperature Sensor” and “Gate-
way” blocks, with the former responsible for contin-
uous data measurement, recording, and transmission
to the Gateway.
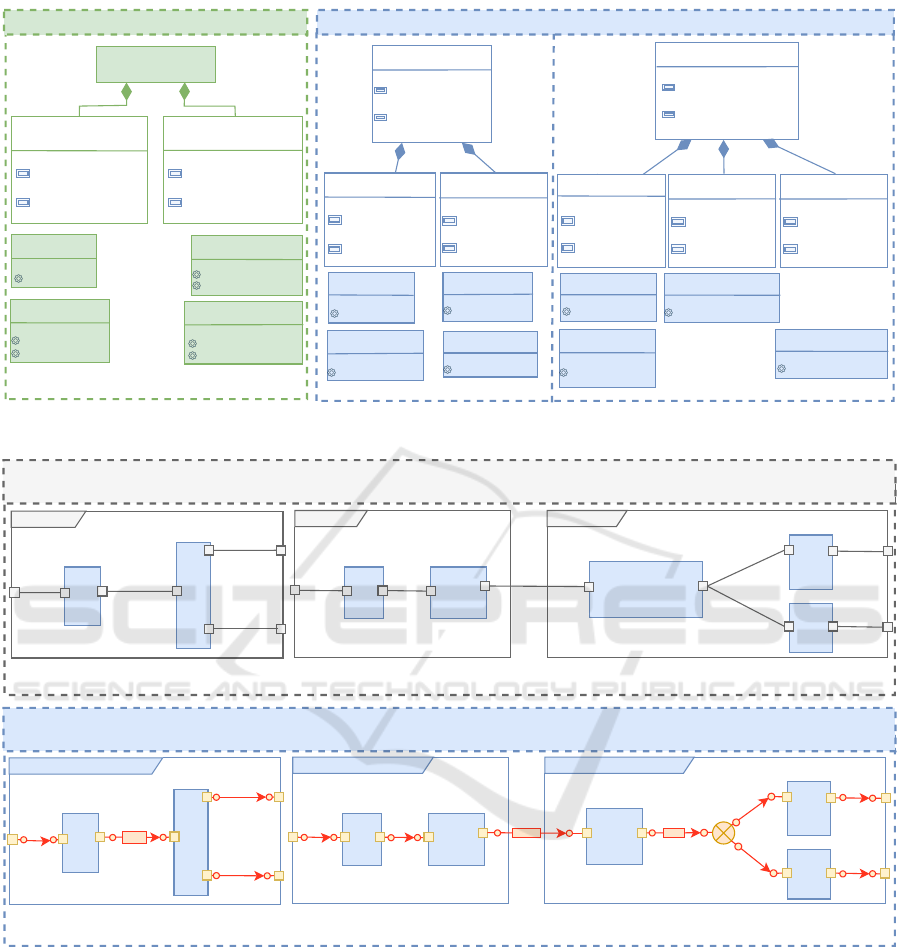
4.2.3 Timed Reo IBD
In Figure 6, we compare the traditional internal block
diagram of SysML with the Timed Reo IBD of Timed
SysReo. The conversion from SysML IBD (Fig-
ure 6 [B-1]) to Timed Reo IBD (Figure 6 [B-2]) in-
volves replacing SysML IBD connectors with “Timed
Reo connectors”, allowing for a more explicit repre-
sentation of component internal composition and in-
teraction protocols, including data and timing con-
straints.
SysML IBD connectors establish connections be-
tween compatible ends without managing connected
entities, leading to “endogenous” coordination that
complicates design, reduces reusability, and increases
complexity, constraints, and project costs in CPS
modeling. In contrast, Timed Reo IBD integrates co-
ordination logic into connectors, enhancing reusabil-
ity and simplifying component design, commonly
used for model coordination in complex systems.
Timed Reo IBD provides a stakeholder-friendly
diagram for visualizing CPS components and their
timed interactions. It enhances reusability by combin-
ing simpler circuits at boundary nodes, easing the cre-
ation of complex circuits. Additionally, Timed Reo
IBD offers an explicit means of expressing systems
via Timed Constraint Automata (TCA) (Arbab et al.,
2007), aiding accurate delineation and examination.
Timed Reo IBD enable CPS designers to precisely
capture exogenous communication and synchroniza-
tion patterns among components, enhancing system
reliability, safety, and performance while potentially
detecting errors early during development, thus sav-
ing time and costs.
In Figure 6[B](b,c), we illustrate the internal
structure of the SB and RTU components, along with
their timed interaction protocols. For instance, the
gateway (gtw) component transmits the “sendTem-
pData()” message to the medical database (MDB)
component at @t1 <=1 TU. Subsequently, the MDB
component analyzes the data at @t2<= 3 TU and for-
wards the analyzed data to the xrouter component.
Depending on the temperature status, the xrouter
component decides whether to send an “emergen-
cyAlerts()” message to the Patient Alert (PA) compo-
nent or an “updatePatientInfo()” message to the Pa-
tient Update (PU) component. Thus, the Timed Reo
IBD serves as a robust tool for modeling and an-
alyzing systems, showcasing how Timed Reo con-
nectors elucidate communication and coordination
ICSOFT 2024 - 19th International Conference on Software Technologies
482
<<System>>
SMB system
1
attributes
+ <<ProxyPort>>
+ prtu_out:loutRTU
+ <<ProxyPort>>
+ prtu_in:linRTU
1..*
<<IntBlock>>
linSB
operations
+ tempDataIn()
<<Block>>
RTU
operations
<<IntBlock>>
linRTU
+ sendTempData()
+ analyzeData()
<<IntBlock>>
loutSB
operations
+ tempDataOut()
+ sendTempData()
<<Block>>
Smart Bed (SB)
attributes
+ <<ProxyPort>>
+ psb_out:loutSB
+ <<ProxyPort>>
+ psb_in:linSB
<<IntBlock>>
linG
operations
+ tempDataOut()
<<IntBlock>>
linG
operations
+sendTempData()
1 1
<<Block>>
Smart Bed (SB)
attributes
+<<ProxyPort>>
+psb_out:loutTS
+ <<ProxyPort>>
+ psb_in:linTS
1)
<<IntBlock>>
loutTS
operations
+ tempDataOut()
<<IntBlock>>
linTS
operations
+ tempDataIn()
<<IntBlock>>
linPA
operations
+ emergencyAlerts()
1
1
<<Block>>
RTU
attributes
+<<ProxyPort>>
+psb_out:loutRTU
+ <<ProxyPort>>
+ psb_in:linRTU
2)
<<IntBlock>>
loutMDB
operations
+analyzeData()
<<IntBlock>>
linMDB
operations
+sendTempData()
1
<<Block>>
Patient Update
attributes
+<<ProxyPort>>
+pg_out:loutPU
+<<ProxyPort>>
+pg_in:linPU
<<Block>>
MDB
attributes
+<<ProxyPort>>
+ps_out:loutMDB
+<<ProxyPort>>
+ps_in:linMDB
<<IntBlock>>
linPU
operations
+ updatePatientInfo()
Level 2 - Concrete SMB ExtBDD Model
[B]
<<IntBlock>>
loutRTU
operations
+ emergencyAlerts()
+ updatePatientInfo()
Level 1 - Abstract SMB ExtBDD Model
[A]
<<Block>>
Temp Sensor(TS)
attributes
+<<ProxyPort>>
+ps_out:loutTS
+<<ProxyPort>>
+ps_in:linTS
<<Block>>
Gateway
attributes
+<<ProxyPort>>
+pg_out:loutG
+<<ProxyPort>>
+pg_in:linG
<<Block>>
Patient Alerts
attributes
+<<ProxyPort>>
+pg_out:loutPA
+<<ProxyPort>>
+pg_in:linPA
Figure 5: The ExtBDD model of the SMB system.
Timed Reo IBD SMB
Timed Reo IBD RTU
+prtu_out
(b) Timed Reo IBD of SB
Timed Reo IBD SB
+ psb_in
+ ts:
TS
+ psb_out
+ gtw:
Gateway
temp
DataIn()
temp
DataOut()
sendTempData()
(a) Timed Reo IBD of SMB
+psb_in
+sb:
SB
+rtu:
RTU
sendTemp
Data()
(c) Timed Reo IBD of RTU
+ prtu_in
+ mdb:
MDB
analyzeData()
+ pa:
PA
+ pu:
PU
emergencyAlerts()
updatePatientInfo()
+prtu_out
+prtu_out
+prtu_out
temp
DataIn()
emergencyAlerts()
update
PatientInfo()
t2<=3
t1<=1
t1<=1
IBD SMB
IBD RTU
+prtu_out
(b) IBD of SB
IBD SB
+ psb_in
+ ts:
TS
+ psb_out
+ gtw:
Gateway
temp
DataIn()
temp
DataOut()
sendTempData()
(a) IBD of SMB
+psb_in
+sb:
SB
+rtu:
RTU
sendTemp
Data()
(c) IBD of RTU
+ prtu_in
+ mdb:MDB
analyzeData()
+ pa:
PA
+ pu:
PU
emergencyAlerts()
updatePatientInfo()
+prtu_out
+prtu_out
+prtu_out
temp
DataIn()
emergencyAlerts()
update
PatientInfo()
> >
> >
>
>
>
>
> > > >
> > >
>
>
> >
>>
[A] Traditional IBD of SysML
[B] Extending IBD with Timed Reo: Timed Reo IBD
Figure 6: Comparison between a traditional SysML IBD and a Timed Reo IBD for the SMB system.
among components, resulting in a comprehensive rep-
resentation of the system’s structure and behavior.
Another notable aspect of Timed Reo IBD is its
capability to validate predefined requirements, as de-
picted in Figure 4. For instance, the “R2.2” require-
ment is validated using a timed FIFO channel, co-
ordinating the “sendTempData()” message from the
gateway (GTW) component to the MDB component
within a time constraint of t
1
≤ 1. Similarly, the
“R3.1” requirement is validated through a timed FIFO
channel, using the “analyzedData()” message that is
transmitted from the MDB component to the Exclu-
sive Router (EXR) within a time limit of t
2
≤ 3. Sub-
sequently, upon entering the EXR router, the system
dispatches either an “emergencyAlert()” message to
the PA component if the analyzed data deviates from
normal or an “updatePatientInfo()” message to the PU
component if the analyzed data is within normal pa-
rameters.
Integrating SysML and Timed Reo for Modeling Interactions in Cyber-Physical Systems Components
483

5 CONCLUSION AND FUTURE
WORK
In this paper, we proposed a novel incremental de-
sign approach exploiting Timed SysReo models that
combines SysML and Timed Reo notations in order
to enable a faithful modeling of CPS with timing con-
straints. Hence, we specified meta-models to define
Timed SysReo language to formalize CPS architec-
ture, and to detail timed connections between its com-
ponents. We proposed to precise the meta-model with
OCL, that imposes rules to be respected in order to
ensure consistency between Timed SysReo models
in our incremental design approach. Thanks to our
Timed SysReo models, CPS designers can model all
CPS facets and capture their timed complex coordina-
tion. Timed SysReo was illustrated by a Smart Med-
ical Bed (SMB) example that has demonstrated the
principal expressiveness and modeling conveniences.
As future work we plan to: (1) Verify and validate
temporal properties on Timed SysReo models. (2)
Check our Timed SysReo models against time re-
quirements and properties defined in the modeling
steps using the UPPAAL (Bengtsson et al., 1996) tool.
REFERENCES
Arbab, F. (2004). Reo: a channel-based coordination model
for component composition. Mathematical Structures
in Computer Science, 14(3):329–366.
Arbab, F., Baier, C., De Boer, F., and Rutten, J. (2004).
Models and temporal logics for timed component
connectors. In Proceedings of the Second Interna-
tional Conference on Software Engineering and For-
mal Methods, 2004. SEFM 2004., pages 198–207.
IEEE.
Arbab, F., Baier, C., de Boer, F., and Rutten, J. (2007).
Models and temporal logical specifications for timed
component connectors. Software & Systems Model-
ing, 6:59–82.
Baier, C., Sirjani, M., Arbab, F., and Rutten, J. (2006).
Modeling component connectors in reo by con-
straint automata. Science of computer programming,
61(2):75–113.
Barroso, S., Bustos, P., and Nunez, P. (2023). Towards a
cyber-physical system for sustainable and smart build-
ing: a use case for optimising water consumption on
a smartcampus. Journal of Ambient Intelligence and
Humanized Computing, 14(5):6379–6399.
Bengtsson, J., Larsen, K., Larsson, F., Pettersson, P., and
Yi, W. (1996). UPPAAL—a tool suite for automatic
verification of real-time systems. Springer.
Bouskela, D., Falcone, A., Garro, A., Jardin, A., Otter, M.,
Thuy, N., and Tundis, A. (2022). Formal requirements
modeling for cyber-physical systems engineering: An
integrated solution based on form-l and modelica. Re-
quirements Engineering, 27(1):1–30.
Cabot, J. and Gogolla, M. (2012). Object constraint lan-
guage (ocl): a definitive guide. In International school
on formal methods for the design of computer, commu-
nication and software systems, pages 58–90. Springer.
Delligatti, L. (2013). SysML distilled: A brief guide to the
systems modeling language. Addison-Wesley.
Genius, D. and Apvrille, L. (2023). Hierarchical design of
cyber-physical systems. In Modelsward.
Hause, M. et al. (2006). The sysml modelling language. In
Fifteenth European Systems Engineering Conference,
volume 9, pages 1–12.
Huang, P., Jiang, K., Guan, C., and Du, D. (2018). To-
wards modeling cyber-physical systems with sysml/-
marte/pccsl. In 2018 IEEE 42nd Annual Computer
Software and Applications Conference (COMPSAC),
volume 1, pages 264–269. IEEE.
Kim, K.-D. and Kumar, P. R. (2012). Cyber–physical sys-
tems: A perspective at the centennial. Proceedings of
the IEEE, 100(Special Centennial Issue):1287–1308.
Kokash, N., Jaghoori, M. M., and Arbab, F. (2013). From
timed reo networks to networks of timed automata.
Electronic Notes in Theoretical Computer Science,
295:11–29.
Mallet, F. (2015). Marte/ccsl for modeling cyber-physical
systems. Formal Modeling and Verification of Cyber-
Physical Systems: 1st International Summer School
on Methods and Tools for the Design of Digital Sys-
tems, Bremen, Germany, September 2015, pages 26–
49.
Tannoury, P. (2022). An Incremental Model-Based Design
Methodology to Develop CPS with SysML/OCL/Reo.
In Journ
´
ees du GDR GPL, Vannes, France.
Tannoury, P., Chouali, S., and Hammad, A. (2022). Model
driven approach to design an automotive cps with sys-
reo language. In Proceedings of the 20th ACM In-
ternational Symposium on Mobility Management and
Wireless Access, pages 97–104.
Tannoury, P., Chouali, S., and Hammad, A. (2023). Joint
use of sysml and reo to specify and verify the compati-
bility of cps components. In International Conference
on Formal Aspects of Component Software, pages 84–
102. Springer.
Tartarisco, G., Cicceri, G., Bruschetta, R., Tonacci, A.,
Campisi, S., Vitabile, S., Cerasa, A., Distefano, S.,
Pellegrino, A., Modesti, P. A., et al. (2024). An intel-
ligent medical cyber–physical system to support heart
valve disease screening and diagnosis. Expert Systems
with Applications, 238:121772.
Xie, J., Tan, W., Yang, Z., Li, S., Xing, L., and Huang, Z.
(2021). Sysml-based compositional verification and
safety analysis for safety-critical cyber-physical sys-
tems. Connection Science, pages 1–31.
ICSOFT 2024 - 19th International Conference on Software Technologies
484
