
Intelligent Transportation Systems: A Survey on Data Engineering
Safa Batita
a
, Achraf Makni
b
and Ikram Amous
c
National School of Electronics and Telecommunications (ENET’Com), University of Sfax, MIRACL Laboratory,
Airport Road, km 4, B.P. 1088, 3018 Sfax, Tunisia
Keywords:
Intelligent Transportation Systems, Databases, Artificial Intelligence, Advanced Driver Assistance Systems.
Abstract:
This paper presents an examination of data engineering within Intelligent Transportation Systems (ITS), focus-
ing on integrating advanced technologies such as Real-Time Databases (RT-DBs), Graph Databases (GDBs),
and Artificial Intelligence (AI) to improve ITS capabilities. The decision to focus on database systems and AI
in this paper is based on their crucial roles in shaping modern transportation systems and offers a comprehen-
sive view of the technological framework influencing ITS. Through an extensive review of existing literature,
the paper explores how these solutions synergistically contribute to data collection, organization, processing,
and extraction of value from various ITS data. The paper analyzes the transformative impact of real-time data
management in connected vehicle systems and the efficacy of GDBs in capturing complex relationships within
intelligent transportation networks. Additionally, it assesses the adaptability of AI in various ITS applications,
including traffic prediction, driver assistance, and accident analysis. Despite their benefits, the paper discusses
persistent challenges related to system complexity, interoperability, data management, and model accuracy,
which impact the widespread deployment of ITS. Furthermore, the paper presents recommendations for ad-
dressing these challenges and emphasizes research directions that require further exploration, underscoring
the importance of intelligent and efficient transportation worldwide.
1 INTRODUCTION
In the structure of modern civilization, transportation
systems are deeply integrated into daily human activ-
ities. With an estimated 40% of the world’s popula-
tion spending at least one hour on the road every day,
it’s clear that transportation is central to our collective
existence. This widespread dependence has increased
significantly in recent years, a trend that reflects the
rapid urbanization and globalization seen around the
world. As a result, transportation infrastructure is at
an intersection, facing multiple opportunities for in-
novation and development while handling numerous
challenges.
ITS are advanced applications that offer innova-
tive services for different modes of transport and traf-
fic management. ITS use information and communi-
cation technologies to improve transportation system
efficiency, safety, and environmental performance.
These systems, supported by sophisticated computa-
tional models and databases, are central to the transi-
a
https://orcid.org/0009-0005-2988-6516
b
https://orcid.org/0000-0002-6992-5824
c
https://orcid.org/0000-0002-5893-9833
tion towards autonomous vehicles and interconnected
urban traffic networks. This paper comprehensively
analyzes emerging research on data engineering for
ITS applications relating to the integration of ad-
vanced technologies like RT-DBs, GDBs, and IA.
The survey examines the role of RT-DBs in
enhancing Advanced Driver Assistance Systems
(ADAS), a key ITS application for vehicle safety and
autonomy. It explores the use of GDBs in effectively
managing the complex relationships inherent in ITS
networks, including connected vehicles, smart infras-
tructure, and transportation systems. Additionally, the
transformational impact of AI and Machine Learning
(ML) techniques is analyzed across various ITS im-
plementations encompassing traffic prediction, con-
gestion avoidance, driver behavior modeling, and ac-
cident analysis. These results underscore the signifi-
cance of integrating advanced database systems and
AI technologies in shaping the future of intelligent
transportation.
The rest of this paper is organized as follows: Sec-
tion 2 presents ITS integrating databases. Section
3 delves into the ITS using AI. Section 4 offers a
comprehensive discussion on the current state of ITS
technology, accompanied by recommendations and
Batita, S., Makni, A. and Amous, I.
Intelligent Transportation Systems: A Sur vey on Data Engineering.
DOI: 10.5220/0012857300003756
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 13th International Conference on Data Science, Technology and Applications (DATA 2024), pages 169-179
ISBN: 978-989-758-707-8; ISSN: 2184-285X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
169

research challenges for future initiatives. The paper
concludes with Section 5.
2 ITS INTEGRATING
DATABASES
ITS rely on advanced technologies to handle the vast
volume and velocity of data produced by connected
vehicles, transit networks, and smart infrastructure.
Effective data storage and processing capabilities are
crucial for extracting value and enabling enhanced
transportation analytics and services. This section
analyzes two key data management technologies ap-
plied across various ITS implementations: RT-DBs
and GDBs.
This section explores research that integrates real-
time relational databases and enhances ITS represen-
tation with GDBs.
2.1 ITS Enhanced with Real-Time
Relational Databases
The modern ITS face the significant challenge of
managing increasingly voluminous data, much of
which is generated in real-time. This presents a criti-
cal challenge for ensuring data consistency and valid-
ity. To address this challenge, integrating databases
into ADAS has been proposed in several studies. RT-
DBs are especially instrumental in ADAS, empow-
ering reliable analysis of dynamic vehicle data from
various onboard sensors. By consistently integrating
with ADAS, RT-DBs ensure efficient management of
constantly evolving driving variables such as vehicle
position, speed, and direction. This integration im-
proves the overall effectiveness and responsiveness of
ADAS.
In their pursuit of advancing autonomous ADAS,
(Marouane et al., 2016) focused on leveraging pat-
tern reuse methods. They introduced the integration
of a real-time database system and formulated three
distinct design patterns. These patterns were crafted
to articulate real-time constraints and manage real-
time data, considering both structural and dynamic as-
pects of the system. Continuing this line of research,
(Marouane et al., 2018) proposed a specialized UML
(Unified Modeling Language) profile, named UML-
RTDB2 (UML-RealTimeDataBase), to express pat-
tern variability and real-time constraints and convey
non-functional properties. This further refined the
framework for developing sophisticated autonomous
ADAS.
However, the objective of (Elleuch et al., 2023)
aimed to enhance the performance of Cooperative Ad-
vanced Driver Assistance Systems (C-ADAS) with a
focus on improving road safety. This enhancement
addressed various scenarios such as collision avoid-
ance at intersections, obstacle and dangerous area de-
tection (Elleuch et al., 2021), and management of
overtaking maneuvers (Elleuch et al., 2019). The key
aspect of their approach involved effectively manag-
ing the significant amount of sensor data transmitted
through Vehicle-To-Vehicle (V2V) and Vehicle-To-
Infrastructure (V2I) communications. To address this
challenge, the authors proposed integrating real-time
database into C-ADAS within the framework of Ve-
hicular Ad-hoc NETworks (VANETs), which would
be managed by a suitable Real-Time Database Man-
agement System (RT-DBMS). The incorporation of
RT-DB has proven to enhance communication effi-
ciency by reducing the number of messages sent, ex-
changed, and lost. Additionally, it improves response
times by establishing new formulas, conditions, and
rules based on the information stored in the real-time
database.
In summary, the innovative approaches cited
above in these studies signify considerable progress
in the development of ADAS and C-ADAS technolo-
gies. By emphasizing the reuse of patterns, integrat-
ing real-time databases, and formulating specialized
UML profiles, these approaches announce a trans-
formative move towards autonomous driving systems
that are not only more intricate and capable but also
safer and more efficient.
Note that these approaches are based on the real-
time Relational Database (RDB) model proposed by
(Idoudi et al., 2008). According to this model, real-
time data is defined as a quadruple: d = (d
value
, d
stamp
, d
avi
, mde).
Here, d
value
represents the current value of the
data, d
stamp
denotes the timestamp of the value up-
date, d
avi
signifies the absolute validity interval, and
mde refers to the maximum permissible error between
the actual and stored values. This model is imple-
mented to ensure precise data management and pro-
cessing in autonomous driving systems.
Despite the benefits of the real-time aspect, incor-
porating RDB presents challenges like implementa-
tion intricacies, data processing complexities, and
scalability and adaptability issues. As this domain
progresses, imminent research is expected to ad-
dress these challenges, aiming for autonomous driv-
ing systems that are more adaptable and flexible while
achieving a balance between technological sophisti-
cation and practical usability.
DATA 2024 - 13th International Conference on Data Science, Technology and Applications
170

2.2 ITS Empowered by Graph
Databases
Graph databases are increasingly significant in ITS
due to their exceptional ability to handle complex and
interconnected data, which is essential for modern
transportation networks. This technology is pivotal
for managing and analyzing vast amounts of data gen-
erated by various components of ITS, including traffic
flow, transportation networks, and vehicle communi-
cations.
Several studies have delved deeply into this area
to illustrate the significance of GDBs in ITS further.
For instance, the research by (Oberoi et al., 2018) pro-
poses a structured time-varying graph (TVG) model
for understanding dynamic road traffic environments,
which integrates both spatial and temporal dimen-
sions. The purpose of this model is to record and an-
alyze the interactions and changes within urban traf-
fic systems while considering static and dynamic el-
ements such as vehicles and road infrastructures. By
integrating time-varying node and edge presence and
labeling functions, the model improves the precision
of traffic flow analysis in urban environments. The
paper details the theoretical foundation for the TVG
and establishes it with existing work on spatial graph
modeling. The goal of this study is to establish the
groundwork for future application development, with
a focus on using these models to develop graph algo-
rithms that can analyze and interpret traffic patterns.
The incorporation of real-world traffic data, gathered
by CEREMA in Rouen, France, will simplify the im-
plementation and evaluation of the proposed models
and algorithms.
(Wirawan et al., 2019) proposes a unique database
design for multimodal transportation, focusing on Se-
marang. They developed this model using an Ori-
ented Entity-Relationship Diagram (O-ERD), later
converting it into a graph database schema executed
on the Neo4j graph database. The model includes
three main nodes: Shelter, Angkot Stopper, and
Closer Place, representing Bus Rapid Transit (BRT)
shelters, city transportation, and nearby locations. A
unique feature is the ”Angkot Stopper” node, sym-
bolizing angkots with flexible stopping points. The
model’s efficiency was tested through Cypher query
language search queries, particularly using the ”col-
lect” function to enhance path formation. This ap-
proach differs from previous studies, in that it inte-
grates routing algorithms within the graph database
system, simplifying route construction and improving
route discovery based on passenger destination prox-
imity.
(Bhogaram et al., 2020) highlights the utility of
the graph database Neo4j for analyzing transportation
networks. They used centrality algorithms to identify
important nodes and critical paths within the trans-
portation network, improving resilience against chal-
lenges like heavy traffic and natural disasters. This
study demonstrates the efficiency of GDBs in analyz-
ing and optimizing transportation systems.
(Chandra et al., 2020) introduced GraphRQI, an
advanced algorithm for classifying driving behaviors
by analyzing movement paths. This method employs
a supervised learning algorithm and spectral analysis
of traffic graphs to enhance computational efficiency.
In the GraphRQI model, drivers are depicted as nodes
in a sparse, undirected, and unweighted, with their in-
teractions indicated by edges. It classifies behaviors
such as aggressive or conservative driving based on
interactions within traffic graphs. GraphRQI effec-
tively classifies driving behaviors by capturing traffic
graph interactions. Its characteristic value algorithm
computes the traffic graph with double the speed of
previous methods. Tests using traffic videos and au-
tonomous driving datasets, particularly in urban ar-
eas, showed a 25% improvement in accuracy over ex-
isting driver behavior classification methods. How-
ever, its accuracy depends on the reliability of the
tracking technology used to monitor road agent po-
sitions.
(Zhang et al., 2021) presented a novel method to
analyze the structure and behavior of Autonomous
Transportation Systems (ATS). ATS represents an ad-
vanced form of intelligent transportation, known for
its self-organizing and autonomous features. The
team’s approach involved creating a knowledge graph
network to represent the ATS, categorizing it into
five distinct nodes: Technology, Demand, Service,
Function, and Component. Each of these nodes cap-
tures different aspects of the ATS. The research used
Neo4j to store structured data, forming a compre-
hensive knowledge graph of the transportation sys-
tem network. This graph is composed of two layers:
the model layer and the data layer. The model layer
outlines the relationships between various entities in
the ATS, according to the five elements and their at-
tributes. This creates a structural framework for the
system. The data layer, meanwhile, uses Neo4j’s ca-
pabilities to store and visually present data related to
the ATS.
(Bollen et al., 2021) explored Neo4j for manag-
ing data in sensor-equipped transportation networks,
centering on spatial and temporal data querying using
Cypher with custom functions and procedures. Their
study aims to bridge the gap between spatiotemporal
data and queries, laying advanced analytical improve-
ments in ITS.
Intelligent Transportation Systems: A Survey on Data Engineering
171

(Garc
´
ıa et al., 2022) introduced the interopera-
ble graph-based Local Dynamic Map (iLDM) for
autonomous and connected vehicles. This local
database effectively integrates both static and dy-
namic data from multiple sources employing Neo4j
and OpenLABEL, ensuring adaptability in the rapidly
changing vehicle technology sector. A thorough per-
formance testing process, involving a vehicle discov-
ery service function, showcased iLDM’s superiority
over other LDM implementations, making it highly
practical for the real-time development of advanced
driver assistance systems.
(Maduako et al., 2022) introduced a novel ap-
proach for distinguishing high-risk traffic accident lo-
cations, incorporating Neo4j to illustrate the dynamic
relationship between accidents and the road network
as a space-time-varying graph. By analyzing net-
work connectivity through graph analytics metrics
such as degree centrality and PageRank, the research
identifies high-risk areas for urban planners, enabling
proactive accident prevention.
(Zhang et al., 2022) presented a comprehen-
sive analysis of traffic accident data and constructed
a knowledge graph to enhance traffic safety man-
agement. By integrating multidimensional factors
such as people, vehicles, roads, and the environ-
ment, the knowledge graph facilitates the acquisition
and reuse of valuable insights within structured case
data. Through visualization analysis, including ac-
cident portraits, classifications, statistics, and corre-
lation paths, the knowledge graph provides complex
relationships among accident elements. This helps
both researchers and traffic management departments
better understand accident characteristics and imple-
ment effective measures to avoid accidents and im-
prove overall safety.
(Yuan et al., 2023) focused on developing a
knowledge graph for traffic safety management us-
ing Neo4j. The study addresses the complexity and
scattered nature of traffic safety data by integrating
various data types into a structured knowledge graph.
It includes creating node and relationship entities to
represent different aspects of traffic safety, like ille-
gal acts, vehicle failures, and emergency responses.
This study moreover discusses the implementation of
query functions using Cypher and rule matching for
effective data analysis and decision-making in traffic
safety management. It highlights the potential of us-
ing Neo4j for organizing and analyzing complex data
in the context of traffic safety.
Note that the previous studies collectively under-
score the importance of GDBs, through Neo4j, as in-
dispensable tools for transportation network analysis
and administration, driving advancements in safety,
efficiency, and resilience across various transportation
domains. So, each study presented aimed to high-
light the unique capabilities and applications of graph
databases through Neo4j. For instance, (Oberoi et al.,
2018) demonstrated that using a graph representation
in Neo4j facilitated effective modeling and analysis
of the dynamic spatial and temporal aspects of the ur-
ban intersection scenario. While (Oberoi et al., 2018)
concentrated on developing theoretical graph mod-
els, the experimental findings showcased the practi-
cal utility of using Neo4j’s graph queries for real-time
collision detection. Similar to (Wirawan et al., 2019)
and (Bhogaram et al., 2020), the experiments utilized
Neo4j’s capabilities for route optimization and iden-
tifying critical paths, further validating the benefits of
GDBs for transportation network analysis. In addi-
tion, the integration of AI techniques, like neural net-
works, aligns with (Chandra et al., 2020) and (Mad-
uako et al., 2022), which utilized Neo4j to analyze
driving behaviors and mitigate risks within the trans-
portation systems, emphasizing its role in improving
accuracy and facilitating proactive risk identification.
Other studies, including (Zhang et al., 2021), (Garc
´
ıa
et al., 2022), (Zhang et al., 2022), and (Yuan et al.,
2023) further investigate the development of compre-
hensive knowledge graphs for ITS, with a focus on
real-time data management, spatial queries, and vehi-
cle trajectory prediction. Combining these functions
within a unified knowledge graph could pave the way
for future advancements, using Neo4j’s capabilities
to improve safety, efficiency, and robustness across
transportation networks. Each cited research high-
lights the importance of GDBs in ITS, demonstrating
their value in improving network operations, analyz-
ing accidents, managing risks proactively, and opti-
mizing traffic flow in various transportation settings.
Table 1 offers a comprehensive comparison of var-
ious ITS that have integrated GDBs. Each approach
is evaluated based on its objective, use of real-world
and real-time data, decision-making, reliance on data
quality, and complexity. The table shows variations
among approaches, with some excelling in leveraging
real-world and real-time data, whereas others distin-
guish themselves in decision-making. In any case, it’s
essential to recognize that each approach has its own
set of strengths and weaknesses.
For instance, methodologies heavily dependent on
real-world and real-time data may yield more precise
and timely experiences, essentially improving ITS.
However, managing and processing such extensive
data volumes can pose challenges.
In conclusion, while Table 1 gives an extensive
overview of these various approaches and their contri-
butions to ITS using GDBs, it‘s significant to consider
DATA 2024 - 13th International Conference on Data Science, Technology and Applications
172

the strengths and weaknesses of these approaches.
3 ITS USING AI
Advancements have significantly influenced the evo-
lution of intelligent transportation systems in artifi-
cial intelligence. These innovations are revolutioniz-
ing our strategies concerning urban mobility, traffic
management, and vehicle safety. Within this dynamic
environment, numerous studies have emerged, each
investigating various applications and approaches of
artificial intelligence to enhance the efficiency and ef-
ficacy of transportation systems. This comprehen-
sive review delves into various significant research
endeavors that highlight the integration of these tech-
nologies in managing and improving traffic flow, pre-
dicting driver actions, and optimizing safety protocols
at intersections and urban roads. The incorporation of
these technologies is not just improving current sys-
tems but also laying the way for future advancements
in transportation safety and efficiency.
(Meena et al., 2020) introduced a novel tool to
accurately and timely predict traffic flow consider-
ing diverse environmental factors that can affect traf-
fic like traffic signals, accidents, and road mainte-
nance. Given the recent exponential increase in traf-
fic data and the move toward big data concepts for
transportation, today’s traffic prediction methods that
rely on traffic models are still insufficient for real-
world applications. To analyze the vast amounts of
data transportation system data with less complex-
ity, the authors intend to use machine learning, ge-
netic algorithms, soft computing, deep learning al-
gorithms, and image processing techniques for traffic
sign recognition. The proposed algorithm showcased
improved complexity concerns and showed greater
accuracy than previous algorithms.
(Hu et al., 2020) simulated driver behavior at sig-
nalized intersections under diverse traffic scenarios
involving many vehicle types like cars, buses, and
motorized three-wheelers. This research collects real
world GPS data and video data from vehicles ap-
proaching intersections with red signals in Delhi and
Mumbai, India. It examines the acceleration and de-
celeration patterns of these vehicles to determine the
impact zone of the intersection - the distance from
the intersection where drivers commence decelerat-
ing after observing the red signal. The research aims
to categorize drivers into categories such as aggres-
sive, normal, and timid based on their acceleration
and deceleration behavior. Nevertheless, it finds that
drivers cannot be easily classified, and their behavior
is better represented by a continuous normal distribu-
tion rather than discrete classes. The analysis, which
does not employ machine learning or deep learning
techniques, emphasizes the complexity of modeling
driver behavior in diverse traffic conditions and the
dependency on high-quality GPS and video data.
(Lv et al., 2020) used Deep Learning (DL) to ad-
dress safety issues in ITS. The research examines var-
ious aspects such as data transmission performance,
prediction accuracy, and route change strategies. In
the analysis of the system’s data transmission perfor-
mance, it is found that when the probability of suc-
cessful transmission is 100% and the λ value between
0.01 and 0.05, it is closest to the actual result, and
the data delay is the smallest. In the analysis of pre-
diction accuracy, and using the Gated Recurrent Unit
(GRU) and Long Short-Term Memory (LSTM) algo-
rithms, the authors found that in different types of
cases, the improved system has the best prediction
performance with increasing iterations. After further
analysis of the system’s route guidance strategy, it is
found that the route guidance strategy in this study
can effectively inhibit congestion propagation in the
face of congested road sections, and achieve the ef-
fect of timely evacuation for traffic congestion. As a
result of this study, the improved ITS can significantly
reduce system data transmission delay, improve pre-
diction accuracy, and effectively change the path in
the face of congestion to suppress congestion propa-
gation, providing an experimental reference for fur-
ther transportation.
(Olayode et al., 2021) compared the Markov
Chain Model (MCM) and the Artificial Neural Net-
work (ANN) model for predicting vehicle traffic flow
at signalized intersections. Traffic datasets were ob-
tained from South African highways, roads, and inter-
sections, courtesy of the South African Department
of Transport. This traffic information was obtained
using sophisticated traffic monitoring equipment and
techniques, such as inductive loop detectors, video
cameras, and GPS- controlled equipment stationed
throughout the road. In the ANN model, 100 sets of
traffic data were considered, 70% for learning, 15%
for testing, and 15% for validation. According to the
results obtained in this study, the best traffic dataset
training performance was obtained when the number
of hidden neurons was 9, giving a good coefficient of
determination of 0.96304.
(Karri et al., 2021) aimed to enhance safety at sig-
nalized intersections by employing machine learning
to address the challenges drivers face in the dilemma
zone, the critical moment when a traffic light turns
yellow. The research used Support Vector Machine
(SVM) and K-Nearest Neighbors (KNN) to classify
driver decisions as safe or unsafe. It analyzed behav-
Intelligent Transportation Systems: A Survey on Data Engineering
173
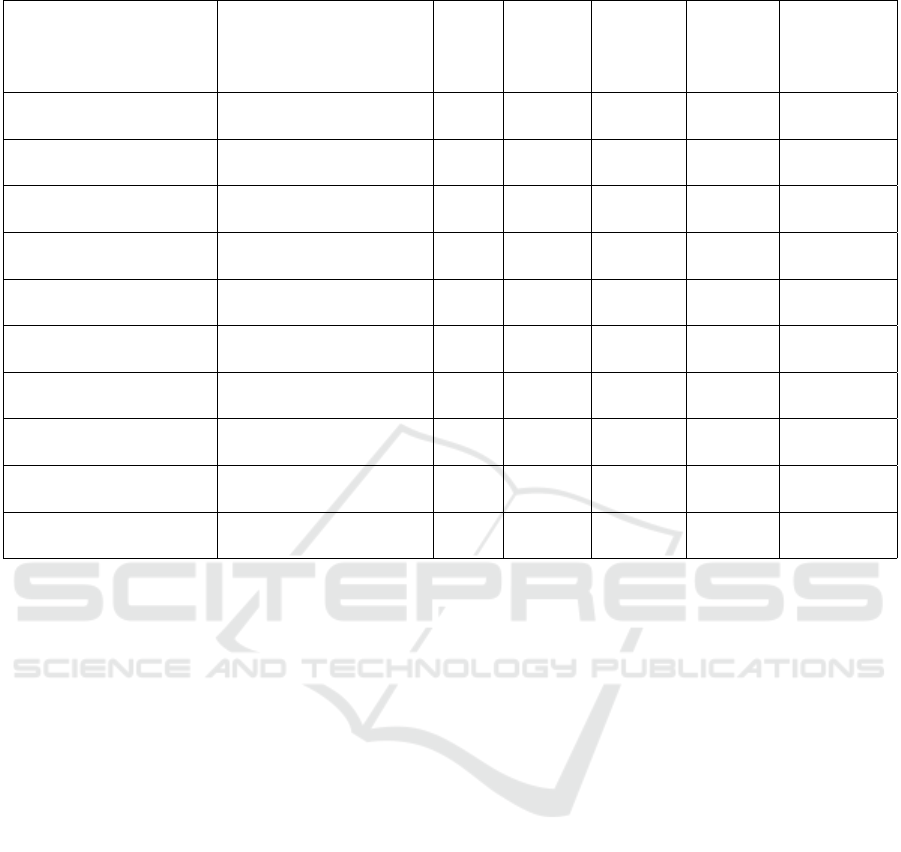
Table 1: Comparative table of ITS that have integrated GDB.
Real Real Decision Reliance
Approach Objectif world time making on data Complexity
data data quality
analysis
(Oberoi et al., 2018) Develop dynamic yes yes no yes yes
traffic graph algorithms
(Wirawan et al., 2019) Design multimodal no no no yes yes
transportation database
(Bhogaram et al., 2020) Analyze Critical yes yes no yes no
Transport Paths
(Chandra et al., 2020) Classify driving yes no no yes no
behaviors
(Zhang et al., 2021) Create and analyze yes yes no no yes
ATS networks
(Bollen et al., 2021) Optimize sensor yes no yes no yes
network queries
(Garc
´
ıa et al., 2022) Create an interoperable no no no no yes
LDM withOpenLABEL
(Maduako et al., 2022) Identify high-risk yes yes no no yes
traffic locations
(Zhang et al., 2022) Analyze traffic no no yes no yes
accident data
(Yuan et al., 2023) Develop traffic no no yes no no
safety graphs
iors from 49 drivers in varied environments. It found
that except for the cubic SVM kernel, all SVM ap-
proaches predicted behavior with over 85% accuracy,
with the linear SVM being the most precise. Although
the coarse Gaussian SVM ranked second in accuracy,
it demanded more computation time. Compared with
KNN and Linear Discriminant Analysis, these also
demonstrated high accuracy rates, with 90.1% and
89.4% respectively. The findings offer crucial insights
into the efficacy of different ML techniques in predict-
ing driver behavior and potentially reducing accidents
at intersections.
(Bagheri et al., 2022) proposed an Artificial Neu-
ral Network-based simulation model for gap accep-
tance behavior. This model was developed through
ANN simulations, leveraging real-world data from a
comprehensive database collected at a stop-controlled
intersection in New Jersey. The practicality of inte-
grating this model into a microscopic simulation tool
was evaluated using the Simulation of Urban MObil-
ity (SUMO) package’s Application Programming In-
terface (API). The ANN model was trained to mimic
drivers’ gap acceptance decisions and subsequently
implemented in SUMO through its API, enabling the
simulation of driver behavior at intersections. This
model was benchmarked against the standard SUMO
settings and a calibrated version of SUMO based on
waiting times and acceptable deviations of vehicles
on the minor road approach. The comparative analy-
sis revealed that the ANN-based model outperformed
the default and calibrated SUMO models in terms of
the selected output metrics. Furthermore, the study
highlighted that the ANN model yielded a more accu-
rate representation of vehicle driving behavior on the
major road approach to the intersection, indicating its
potential for enhancing the realism and accuracy of
traffic simulations.
(Singh et al., 2022) distinguished between the In-
tersection Zone Of Influence (IZOI) and the middle
of a block by analyzing the driver’s acceleration and
deceleration maneuvers. This behavioral data is cap-
tured using a Global Positioning System (GPS) in ve-
hicles, particularly after drivers encounter a red signal
at an intersection. Additionally, the study attempts to
determine the optimal approach length for intersec-
tion simulations that affect driver behaviors, catego-
rizing them as aggressive, normal, or shy based on
their acceleration/deceleration patterns. This compre-
hensive approach provides for a nuanced understand-
ing of how different zones at intersections influence
driver behavior.
(Bharadiya, 2023) focused on exploring the piv-
otal role of ML and AI in the development of smart
cities. Its primary goal is to understand how these
technologies contribute to managing growing urban
areas, enhancing economic growth, reducing energy
DATA 2024 - 13th International Conference on Data Science, Technology and Applications
174

consumption, and improving residents’ living stan-
dards. Additionally, the study examines the infor-
mation flow related to Information and Communica-
tion Technology (ICT) in smart cities. Methodologi-
cally, this research encompasses conducting surveys
to identify typical technologies supporting commu-
nication in smart cities and systematically evaluating
current trends in publications concerning ICT in these
urban areas. ML and AI techniques are employed to
analyze and interpret the data gathered. The findings
reveal that ML and AI are instrumental in various as-
pects of smart city development, especially in ITS.
These technologies are used for tasks like modeling
and simulation, dynamic routing, congestion manage-
ment, and intelligent traffic control, extending their
use across different modes of transportation such as
rail, and road travel.
(Sayed et al., 2023) provided a comprehensive re-
view of ML and DL techniques utilized in traffic pre-
diction, along with addressing the challenges inherent
in applying ML and DL in this domain. The rapid
expansion of the Internet of Things (IoT) has facili-
tated the emergence of smart cities, with ITS at their
core, aiming to enhance transportation efficiency and
mobility, particularly in addressing traffic congestion.
With the increasing adoption of artificial intelligence
approaches, the accuracy of traffic flow prediction
models has improved significantly.
(Shaffiee Haghshenas et al., 2023) focused on pre-
dicting the Level of Road Crash Severity (LRCS) us-
ing ML methods applied to real-existing data from
1627 accidents on roads in Calabria, Italy. The main
objectives include building accurate prediction mod-
els, comparing the performance of ANN and Convo-
lutional Neural Networks (CNN), and identifying the
most influential parameters through sensitivity anal-
ysis. Results indicate that while there is no signif-
icant difference in model accuracy, the CNN model
outperforms the ANN model, achieving 68.4% accu-
racy compared to 61.7%. Sensitivity analysis reveals
the number of vehicles and road elements as the most
and least important factors affecting LRCS, respec-
tively. The study concludes that these models offer
valuable tools for predicting LRCS, with variations
depending on specific case studies.
The advancements in AI have significantly influ-
enced the evolution of ITS, evident in the various ar-
ray of studies examining its applications. The chal-
lenges are various going from enhancing safety and
traffic flow prediction to facilitating smart city de-
velopment and crash severity prediction. Thus, (Lv
et al., 2020) focused on improving safety within ITS
through DL, highlighting enhancements in data trans-
mission performance and congestion management. In
contrast, (Olayode et al., 2021) conducted a compar-
ative analysis between the MCM and ANN for traf-
fic flow prediction at signalized intersections, with
the ANN demonstrating superior performance. (Karri
et al., 2021) aimed to enhance safety at signalized in-
tersections by employing ML techniques to classify
driver decisions during critical moments. Conversely,
(Bagheri et al., 2022) proposed an Artificial Neu-
ral Network-based simulation model for gap accep-
tance behavior, surpassing standard simulation mod-
els in accuracy. Additionally, (Singh et al., 2022) dif-
ferentiated between intersection zones’ influences on
driver behavior, providing nuanced insights into traf-
fic safety measures. (Bharadiya, 2023) explored the
role of ML and AI in smart city development, em-
phasizing their contributions to urban growth man-
agement and transportation efficiency. (Sayed et al.,
2023) provided a comprehensive review of ML and
DL techniques in traffic prediction, highlighting their
increasing accuracy in addressing congestion chal-
lenges. Lastly, (Shaffiee Haghshenas et al., 2023)
employed ML methods to predict road crash sever-
ity, with CNN outperforming ANN. These compara-
tive analyses highlight the various applications of AI
in addressing various challenges within ITS, from en-
hancing safety and traffic flow prediction to facilitat-
ing smart city development and crash severity predic-
tion.
Table 2 presents a comprehensive overview of
studies within ITS using AI, detailing their objectives
as well as the strengths and weaknesses related to
each approach. Each study leverages real-world data
to address complex challenges in transportation safety
and efficiency. Whereas these approaches harness the
power of ML or DL algorithms to extract valuable in-
sights from vast datasets, they also encounter chal-
lenges related to the complexity of modeling and the
dependency on data quality. The use of AI in these
studies offers promising advancements in understand-
ing and managing traffic flow, driver behavior, and
road safety. However, ensuring the reliability and rep-
resentativeness of the data to maximize the efficiency
of AI-powered solutions.
In conclusion, Table 2 provides a comprehen-
sive look at the various studies in ITS that utilize
AI, highlighting the importance of considering the
strengths and weaknesses related to each approach
to understand their contributions and potential chal-
lenges completely.
Intelligent Transportation Systems: A Survey on Data Engineering
175
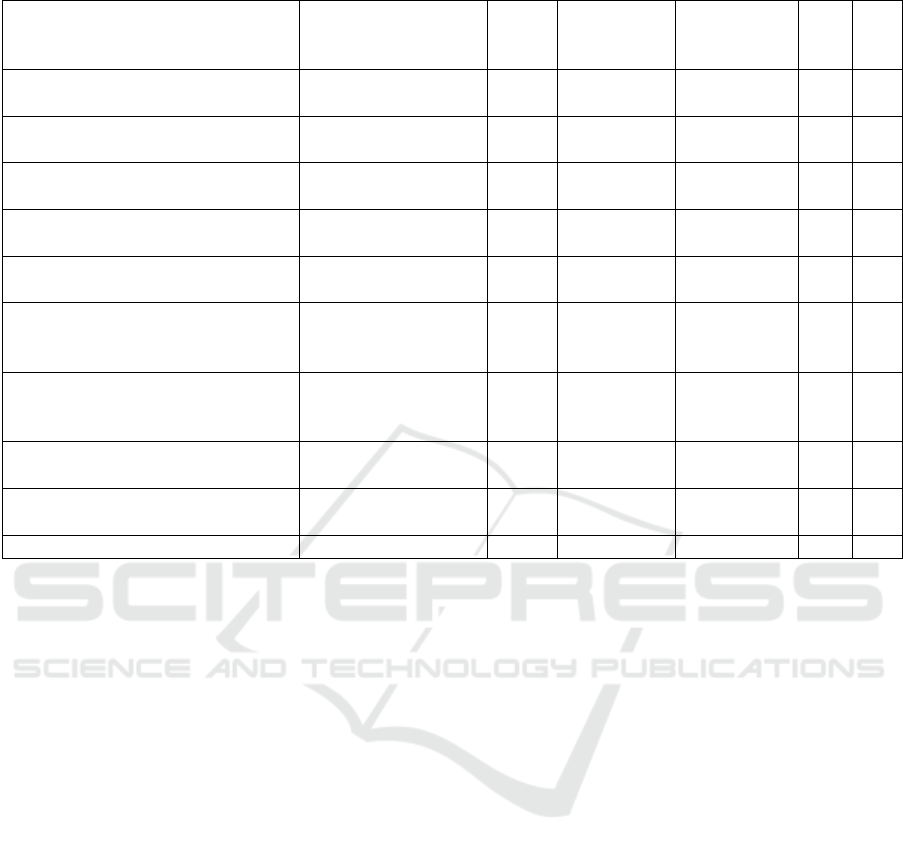
Table 2: Comparative table of ITS using AI.
Real Dependency
Approach Objectif world Complexity on data ML DL
data Quality
(Meena et al., 2020) Enhance traffic yes yes no yes no
flow prediction
(Hu et al., 2020) Analyze intersection yes yes no no yes
driver behavior
(Lv et al., 2020) Improve safety in yes yes no no yes
ITS
(Olayode et al., 2021) Predict vehicle yes no no no yes
trajectory
(Karri et al., 2021) Classify driving no no yes yes no
behaviors
Determine the
(Bagheri et al., 2022) acceptable gap no no yes yes no
in intersections
Modeling driver
(Singh et al., 2022) behaviors at yes no no no no
intersections
(Bharadiya, 2023) Optimize urban no no yes yes no
management
(Sayed et al., 2023) Improve traffic no no yes yes yes
prediction accuracy
(Shaffiee Haghshenas et al., 2023) Predict road crash yes yes yes no yes
4 DISCUSSION AND FUTURE
DIRECTIONS
This section starts by exploring the strengths and chal-
lenges associated with the integration of RT-DBs and
GDBs in ITS. By combining the capabilities of timely
data processing and efficient data structures, these
databases can offer promising avenues to improve ef-
ficiency and decision-making processes within trans-
portation networks. Then, it discusses the integration
of AI in ITS and shows the gained benefits. This para-
graph also shows the strong and relevant relationship
between databases and AI.
Real-time databases offer significant advantages
that make them highly suitable for applications in
ITS. These databases handle, analyze, and store data
with minimal delay, ensuring that the system always
has access to the latest information. This is vital
for making time-sensitive decisions that are related
to optimizing routes, managing traffic, and respond-
ing to incidents. In real-time environments, where
quick handling and action on data are crucial, RT-DBs
can effectively manage the high-velocity data streams
generated by sources such as traffic sensors, cameras,
and GPS devices. So, we recommend implementing
RT-DBs in ITS and leveraging their benefits by incor-
porating advanced analytics techniques for real-time
data processing, and regularly updating and optimiz-
ing database infrastructure to manage increasing data
volumes and changing system requirements. Addi-
tionally, encouraging collaboration among database
engineers, transportation specialists, and AI experts
can aid in the improvement of innovative solutions
that harness the full capabilities of RT-DBs in enhanc-
ing transportation efficiency and safety.
It should be noted that relational databases are
mainly used in the research work proposing RT-DBs.
Within the relational model based on tabular for-
mat, modeling the intricate interconnections among
entities such as vehicles, roads, and obstacles poses
a significant challenge, resulting in computationally
costly queries. This mismatch between the network-
like structure of ITS data and the tabular format of
relational databases can lead to challenges in han-
dling complex relationships and querying intercon-
nected data, which are common in ITS scenarios. So,
this can negatively impact performance and efficient
data retrieval. So, we think that the use of relational
databases may not be the best choice for ITS applica-
tions.
In addition, relational databases struggle to keep
up with the rapidly evolving data sources and require-
DATA 2024 - 13th International Conference on Data Science, Technology and Applications
176
ments of ITS due to their rigid and static schema de-
sign. This often results in costly and disruptive re-
structuring efforts.
In contrast, NoSQL databases such as GDBs excel
in managing interconnected data while using flexible
data models to effectively represent complex relation-
ships. They are characterized by great efficiency and
scalability and are often considered a natural form of
representation of ITS data. Thus, as the volume and
complexity of ITS data continue to grow, relational
databases are becoming increasingly impractical for
advanced ITS applications, while NoSQL alternatives
have architectural advantages that are better aligned
with ITS requirements.
To check the performance of the graph database
versus the relational database, we have conducted
comparative studies by simulating many road situa-
tions with obstacles and executing useful queries to
pass these situations without danger. The first kind of
simulation used an RDB system whereas the second
was based on a graph database. Figure 1 shows an
example of four vehicles used in the simulation.
The target objective: “Vehicle1” must avoid the
obstacle while taking into account vehicles coming in
the opposite direction.
The useful queries to execute by “Vehicle1” are:
• Q1: First vehicle in the opposite direction
• Q2: Distance between two vehicles
• Q3: List of vehicles preceding “Vehicle1”
• Q4: List of vehicles in the opposite direction to
“Vehicle1”
Figure 1: Example of four vehicles on the road.
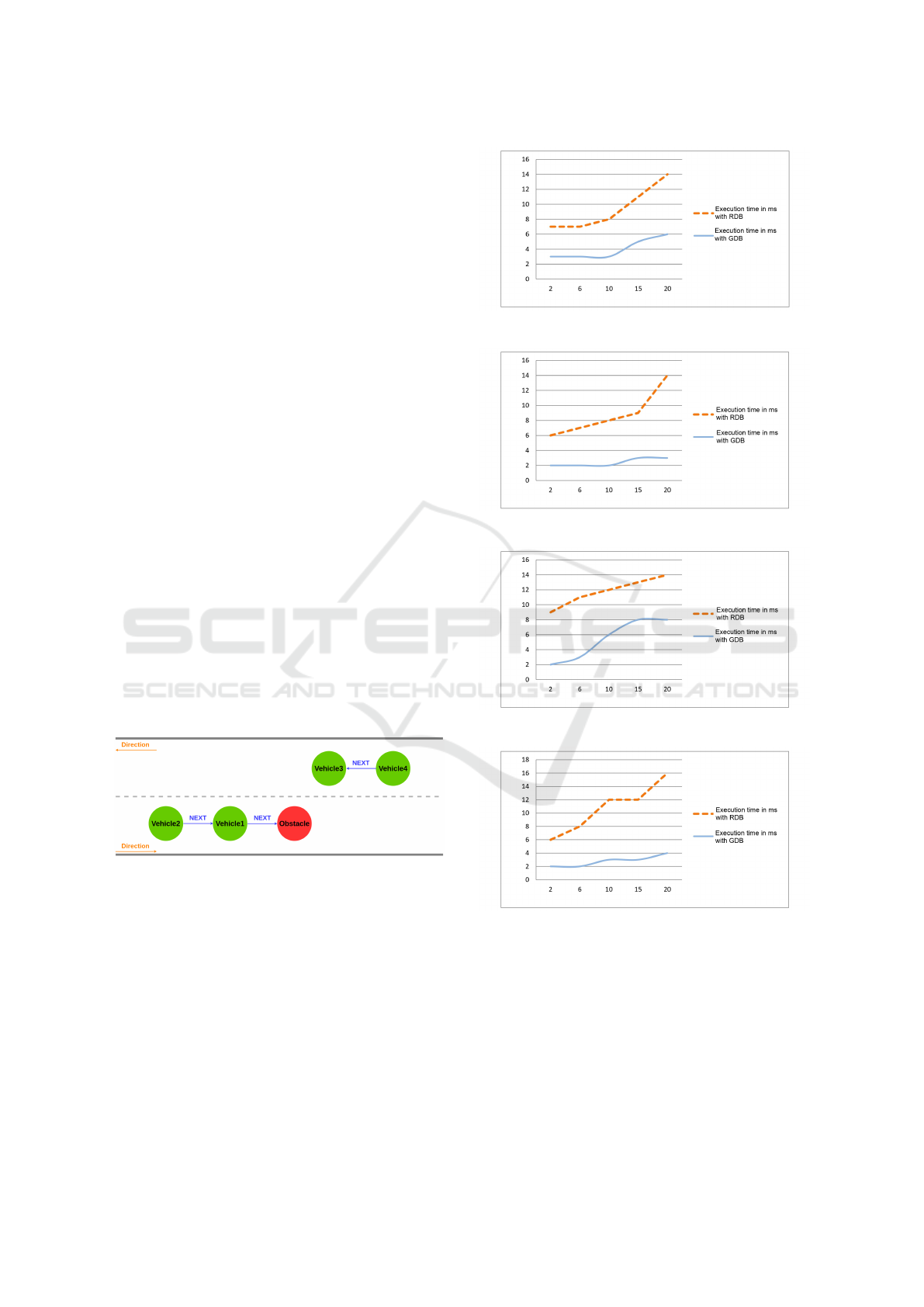
The results presented in figure 2, figure 3, figure 4,
and figure 5 indicate that the use of a graph database
is more advantageous compared to RDB. Particularly,
in certain cases, the execution time is reduced by a
factor of four. Additionally, the quantity of data ma-
nipulated by a graph database does not impact the ex-
ecution time for certain queries.
Therefore, we recommend exploring the integra-
tion of NoSQL databases, especially GDBs, in ITS
applications to address the limitations of relational
databases and improve system performance and scal-
ability.
Figure 2: Query execution time of query 1.
Figure 3: Query execution time of query 2.
Figure 4: Query execution time of query 3.
Figure 5: Query execution time of query 4.
Moreover, we believe that integrating real-time
capabilities into GDBs could present a promising
path forward, combining the benefits of real-time
data processing with the flexibility and efficiency of
GDBs structures. By using real-time data processing
and analysis features, GDBs empower ITS to react
promptly to changing traffic conditions and make in-
formed decisions in real-time. Moreover, this integra-
tion facilitates accurate traffic pattern prediction and
route planning optimization, improving traffic man-
Intelligent Transportation Systems: A Survey on Data Engineering
177

agement and decreasing congestion.
On the other hand, the integration of AI within
ITS brings various benefits to transportation systems.
AI algorithms use extensive datasets from various
sources like sensors and cameras to predict traffic
flows with precision, optimize route planning, and
improve real-time decision-making. Through the uti-
lization of AI, ITS can improve traffic management,
boost safety, and optimize transportation networks,
ultimately leading to more efficient and sustainable
urban mobility solutions.
The integration of AI within ITS underscores the
importance of factors like data quality which can have
a substantial impact on the performance and accu-
racy of AI algorithms. Thus, we can distinguish the
relevant relationship between AI and databases and
consider databases as the basic element of AI. In-
deed, databases can deliver the timely and relevant
data needed for training data sets. Furthermore, Per-
formance and speed directly impact the ability to pro-
cess data on time. The ability of the database to grow
with data, known as scalability, is another important
advantage. In addition, the use of databases allows
building a pipeline that performs data-science-driven
model hosting.
For more performance, NoSQL databases are re-
quired. Indeed, in addition to their high scalabil-
ity, NoSQL databases support various data structures,
which is beneficial for AI applications requiring flexi-
bility in data modeling. Moreover, with NoSQL graph
databases, a knowledge graph describes the meaning
of relationships between two elements. This kind of
graph provides a semantic view of data and can be an
efficient way to model semantics which is important
to getting pertinent results from AI.
Consequently, we recommend yet another time in-
tegration of NoSQL databases, especially GDBs, in
ITS applications to build efficient support for AI.
Conversely, AI can have an impact on databases
by providing innovative solutions to effectively man-
age the growing complexity and volume of data gen-
erated by applications. Thus, the incorporation of
AI techniques into databases improves their perfor-
mance, facilitating enhanced data processing, storage,
and retrieval capabilities. This can increase the poten-
tial to significantly augment ITS capabilities, present-
ing promising avenues for future research and devel-
opment in both ITS and database management. This
enhanced performance plays a critical role in advanc-
ing ITS by guaranteeing that can manage the increas-
ing needs for real-time data analysis and decision-
making in transportation systems.
5 CONCLUSION
In conclusion, the research highlights the importance
of combining ITS with advanced database manage-
ment systems and AI technologies to revolutionize
transportation systems. ADAS with RT-DBs excels
in quick decision-making for safety, while ITS with
GDBs effectively handles complex network relation-
ships. The versatility of AI in various ITS applica-
tions, such as traffic prediction, driver assistance, and
accident analysis, has been explored. However, chal-
lenges like system complexity, interoperability issues,
and data handling constraints persist. These chal-
lenges need to be resolved to enable widespread im-
plementation of ITS solutions.
Moving forward, future ITS research should con-
centrate on overcoming these obstacles to ensure the
consistent integration of database systems and AI for
more efficient, safe, and adaptable urban mobility
solutions. By aligning these technologies, the fu-
ture of intelligent transportation shows great poten-
tial for transforming transportation systems globally.
Moreover, the recommendations presented in this re-
search offer valuable insights into addressing these
challenges and making the field of ITS.
REFERENCES
Bagheri, M., Bartin, B., and Ozbay, K. (2022). Simulation
of vehicles’ gap acceptance decision at unsignalized
intersections using sumo. Procedia Computer Sci-
ence, 201:321–329.
Bharadiya, J. (2023). Artificial intelligence in transporta-
tion systems a critical review. American Journal of
Computing and Engineering, 6(1):34–45.
Bhogaram, P., Wu, X., He, M., and Okenwa, O. (2020). Op-
timal and critical path analysis of state transportation
network using neo4j. International Journal of Urban
and Civil Engineering, 14(10):312–317.
Bollen, E., Hendrix, R., Kuijpers, B., and Vaisman, A.
(2021). Time-series-based queries on stable trans-
portation networks equipped with sensors. ISPRS In-
ternational Journal of Geo-Information, 10(8):531.
Chandra, R., Bhattacharya, U., Mittal, T., Li, X., Bera, A.,
and Manocha, D. (2020). Graphrqi: Classifying driver
behaviors using graph spectrums. In 2020 IEEE In-
ternational Conference on Robotics and Automation
(ICRA), pages 4350–4357. IEEE.
Elleuch, I., Makni, A., and Bouaziz, R. (2019). Coop-
erative overtaking assistance system based on v2v
communications and rtdb. The Computer Journal,
62(10):1426–1449.
Elleuch, I., Makni, A., and Bouaziz, R. (2021). An intelli-
gent and efficient safe driving system. In International
Conference on Hybrid Intelligent Systems, pages 181–
193. Springer.
DATA 2024 - 13th International Conference on Data Science, Technology and Applications
178

Elleuch, I., Makni, A., and Bouaziz, R. (2023). Cicaps: a
cooperative intersection collision avoidance persistent
system for cooperative intersection adas. The Journal
of Supercomputing, 79(6):6087–6114.
Garc
´
ıa, M., Urbieta, I., Nieto, M., Gonz
´
alez de Mendibil, J.,
and Otaegui, O. (2022). ildm: An interoperable graph-
based local dynamic map. Vehicles, 4(1):42–59.
Hu, J., Huang, M.-C., and Yu, X. (2020). Efficient mapping
of crash risk at intersections with connected vehicle
data and deep learning models. Accident Analysis &
Prevention, 144:105665.
Idoudi, N., Duvallet, C., Sadeg, B., Bouaziz, R., and
Gargouri, F. (2008). Structural model of real-time
databases: An illustration. In 2008 11th IEEE In-
ternational Symposium on Object and Component-
Oriented Real-Time Distributed Computing (ISORC),
pages 58–65. IEEE.
Karri, S. L., De Silva, L. C., Lai, D. T. C., and Yong, S. Y.
(2021). Classification and prediction of driving be-
haviour at a traffic intersection using svm and knn. SN
computer science, 2:1–11.
Lv, Z., Zhang, S., and Xiu, W. (2020). Solving the security
problem of intelligent transportation system with deep
learning. IEEE Transactions on Intelligent Trans-
portation Systems, 22(7):4281–4290.
Maduako, I., Ebinne, E., Uzodinma, V., Okolie, C., and
Chiemelu, E. (2022). Computing traffic accident high-
risk locations using graph analytics. Spatial informa-
tion research, 30(4):497–511.
Marouane, H., Duvallet, C., Makni, A., Bouaziz, R., and
Sadeg, B. (2018). An uml profile for representing real-
time design patterns. Journal of King Saud University-
Computer and Information Sciences, 30(4):478–497.
Marouane, H., Makni, A., Bouaziz, R., Duvallet, C., and
Sadeg, B. (2016). Definition of design patterns for
advanced driver assistance systems. In Proceedings of
the 10th Travelling Conference on Pattern Languages
of Programs, pages 1–10.
Meena, G., Sharma, D., and Mahrishi, M. (2020). Traf-
fic prediction for intelligent transportation system us-
ing machine learning. In 2020 3rd International Con-
ference on Emerging Technologies in Computer En-
gineering: Machine Learning and Internet of Things
(ICETCE), pages 145–148. IEEE.
Oberoi, K. S., Del Mondo, G., Dupuis, Y., and Vasseur,
P. (2018). Modeling road traffic takes time (short
paper). In 10th International Conference on Ge-
ographic Information Science (GIScience 2018).
Schloss-Dagstuhl-Leibniz Zentrum f
¨
ur Informatik.
Olayode, I. O., Tartibu, L. K., and Okwu, M. O. (2021).
Traffic flow prediction at signalized road intersec-
tions: a case of markov chain and artificial neural net-
work model. In 2021 IEEE 12th International Con-
ference on Mechanical and Intelligent Manufacturing
Technologies (ICMIMT), pages 287–292. IEEE.
Sayed, S. A., Abdel-Hamid, Y., and Hefny, H. A. (2023).
Artificial intelligence-based traffic flow prediction: a
comprehensive review. Journal of Electrical Systems
and Information Technology, 10(1):13.
Shaffiee Haghshenas, S., Guido, G., Vitale, A., and Astarita,
V. (2023). Assessment of the level of road crash sever-
ity: Comparison of intelligence studies. Expert Sys-
tems with Applications, 234:121118.
Singh, M. K., Pathivada, B. K., Rao, K. R., and Perumal, V.
(2022). Driver behaviour modelling of vehicles at sig-
nalized intersection with heterogeneous traffic. IATSS
research, 46(2):236–246.
Wirawan, P. W., Riyanto, D. E., Nugraheni, D. M. K., and
Yasmin, Y. (2019). Graph database schema for mul-
timodal transportation in semarang. Journal of In-
formation Systems Engineering and Business Intelli-
gence, 5(2):163–170.
Yuan, D., Zhou, K., and Yang, C. (2023). Architecture and
application of traffic safety management knowledge
graph based on neo4j. Sustainability, 15(12):9786.
Zhang, L., Jiang, S., Huang, K., Xiao, Y., You, L., and Cai,
M. (2021). Knowledge graph-based network analy-
sis on the elements of autonomous transportation sys-
tem. In 2021 IEEE 21st International Conference on
Software Quality, Reliability and Security Companion
(QRS-C), pages 536–542. IEEE.
Zhang, L., Zhang, M., Tang, J., Ma, J., Duan, X., Sun, J.,
Hu, X., and Xu, S. (2022). Analysis of traffic acci-
dent based on knowledge graph. Journal of advanced
transportation, 2022.
Intelligent Transportation Systems: A Survey on Data Engineering
179
