
Integrated Data-Driven Framework for Automatic Controller Tuning with
Setpoint Stabilization Through Reinforcement Learning
Babak Mohajer, Neelaksh Singh and Joram Liebeskind
BELIMO Automation AG, Brunnenbachstrasse 1, 8340 Hinwil, Switzerland
Keywords:
Simulation-Based Optimization, Automatic Controller Tuning, Bayesian Optimization, Time Series Clustering,
Online Learning, Reinforcement Learning, Setpoint Stabilization.
Abstract:
We introduce a three-stage framework for designing an optimal controller. First, we apply offline black-box
optimization algorithms to find optimal controller parameters based on a heuristically chosen setpoint profile
and a novel cost function for penalizing control signal oscillations and direction changes. Then, we leverage
cloud data to generate device-specific setpoint profiles and tune the controller parameters to perform well
on the device with respect to the same cost function. Finally, we train a control policy on top of the offline
tuned controller after deployment on device through an online learning algorithm to handle unseen setpoint
variations. A novel reward function encouraging setpoint stabilization is added for preventing destabilization
from coupling effects. Bayesian Optimization and Nelder-Mead methods are used for offline optimization, and
a state-of-the-art model free Reinforcement Learning algorithm namely Soft Actor-Critic is used for online
optimization. We validate our framework using a realistic HVAC hydraulic circuit simulation.
1 INTRODUCTION
Proportional integral derivative (PID) controllers are
at the core of a majority of control systems deployed
to this date owing to their simple design and robust
performance. However, they need adequate tuning to
perform effectively thus encouraging the development
of manual and automatic tuning strategies (Ziegler and
Nichols, 1993; Cohen and Coon, 2022; Garcia and
Morari, 1982;
˚
Astr
¨
om and H
¨
agglund, 2004). With the
formulation of PID tuning as an optimization prob-
lem, modern optimization, data-driven, and machine-
learning (ML) based techniques saw widespread suc-
cess due to their proficiency in handling general non-
convex objective functions (Gaing, 2004; Ahmad et al.,
2021; Mok and Ahmad, 2022).
These data-driven techniques rely on repeated sim-
ulations and offline data collection. This leads to lim-
ited generalizability since the offline-data may not
capture all probable model operating points. For ex-
ample, in Heating, Ventilation, and Cooling (HVAC)
systems typical temperature setpoints vary with sea-
sons and geographical regions. Furthermore, in hier-
archical PID control systems, extremely non-linear in-
teractions between the subsystems cannot be captured
easily by offline tuning algorithms again necessitating
large-datasets which are expensive to collect. These
concerns led to development of data-driven control
algorithms which can adapt to changing conditions
online. The most notable methods are data-driven pre-
dictive control (Zhuang et al., 2023) and reinforcement
learning (RL) (Sutton and Barto, 2020).
RL is able to optimize general objectives without
any assumptions on convexity, differentiability, and
sparsity of the objective function. However, it relies
on learning by randomly exploring the feasible con-
trol input space which can destabilize the system if
deployed directly. Therefore, it is preferable to deploy
RL on top of a known suboptimal but stabilizing base
controller like PID as explored in (Solinas et al., 2024).
But if the underlying PID controller is poorly tuned,
the overall system will continue to behave poorly until
RL learns to take optimal actions, which takes quite
some time in practice due to model free RL’s low sam-
ple efficiency (Recht, 2018). Therefore, one should
tune the base PID gains to the best possible values
based on the model information and empirical data
available at hand using the mentioned offline tuning
strategies. To the best of our knowledge, no existing
work explores this fusion of offline tuned controllers
and online learning control policies.
In this paper, we introduce an optimization frame-
work for data driven automatic controller tuning em-
ploying three sequential stages of optimization. First,
Mohajer, B., Singh, N. and Liebeskind, J.
Integrated Data-Driven Framework for Automatic Controller Tuning with Setpoint Stabilization Through Reinforcement Learning.
DOI: 10.5220/0012861100003758
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2024), pages 431-442
ISBN: 978-989-758-708-5; ISSN: 2184-2841
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
431
we utilize black-box optimization methods to tune a
controller within a simulation to optimally follow a
heuristically chosen setpoint profile. Then, we lever-
age cloud collected data to tune controllers to device
specific setpoint profiles while ensuring that we do not
overfit the controller parameters to the training data
and generalize well to new and unseen setpoint pro-
files. Finally, an additional parameterized control law
is added to the offline optimized control law. This new
parameter set is learned online to adapt to unknown
setpoint profiles and unknown couplings between the
cascaded feedback loops. We add setpoint stabilization
as a key objective for learning an improved controller
online since in the online setting one can explicitly
compensate for the effects of coupling by learning the
influence of control actions on the setpoint. We val-
idate the framework using a realistic HVAC system
simulation and show that adding the online learning
policy significantly improves tracking performance
compared to just using the offline tuned controllers.
The paper is organized as follows: Section 2 sum-
marizes the related work. Section 3 presents the overall
idea of the proposed optimization framework followed
by details on the offline optimal, and online learning-
based control. In Section 4, we use experimental
results to showcase the advantages of the proposed
methodology. Finally, Section 5 discusses conclusions
and directions for future investigations.
2 RELATED WORK
Applying BO for controller tuning was recently
explored in (Neumann-Brosig et al., 2020) and
(Fiducioso et al., 2019). In (Neumann-Brosig et al.,
2020) the evaluations are done based on real-time lab-
oratory experiments, which require a corresponding
infrastructure that makes the tests time- and resource-
consuming. Furthermore, the paper (Fiducioso et al.,
2019) estimates different optimal control parameters
depending on the outside air temperatures, which are
then used for gain scheduling. However, the study
does not consider the influence of setpoints profile
variations on controller performance. This oversight
highlights the need for research considering various
setpoint profiles which could be crucial for optimizing
the controller’s performance in practical scenarios.
On the other hand, several recent works on HVAC
control systems have focused on online learning based
control. These solutions often rely on RL algorithms
to learn policies that optimize for energy use, cost,
comfort, etc. To highlight a few, (Yu et al., 2020) learn
a radial basis function neural network policy using
DQN (Mnih et al., 2013). They rely on a well tuned PI
Heuristic
Setpoint
Profiles
Historical Data
and Setpoint
Profile
Generation
Offline Black-Box
Optimizationon
Setpoint Profiles
On-Device Tuning via
Setpoint Stabilization
Offline Optimization
Online Optimization
Optimal Offline Parameters
1a
2b1b
2a
3
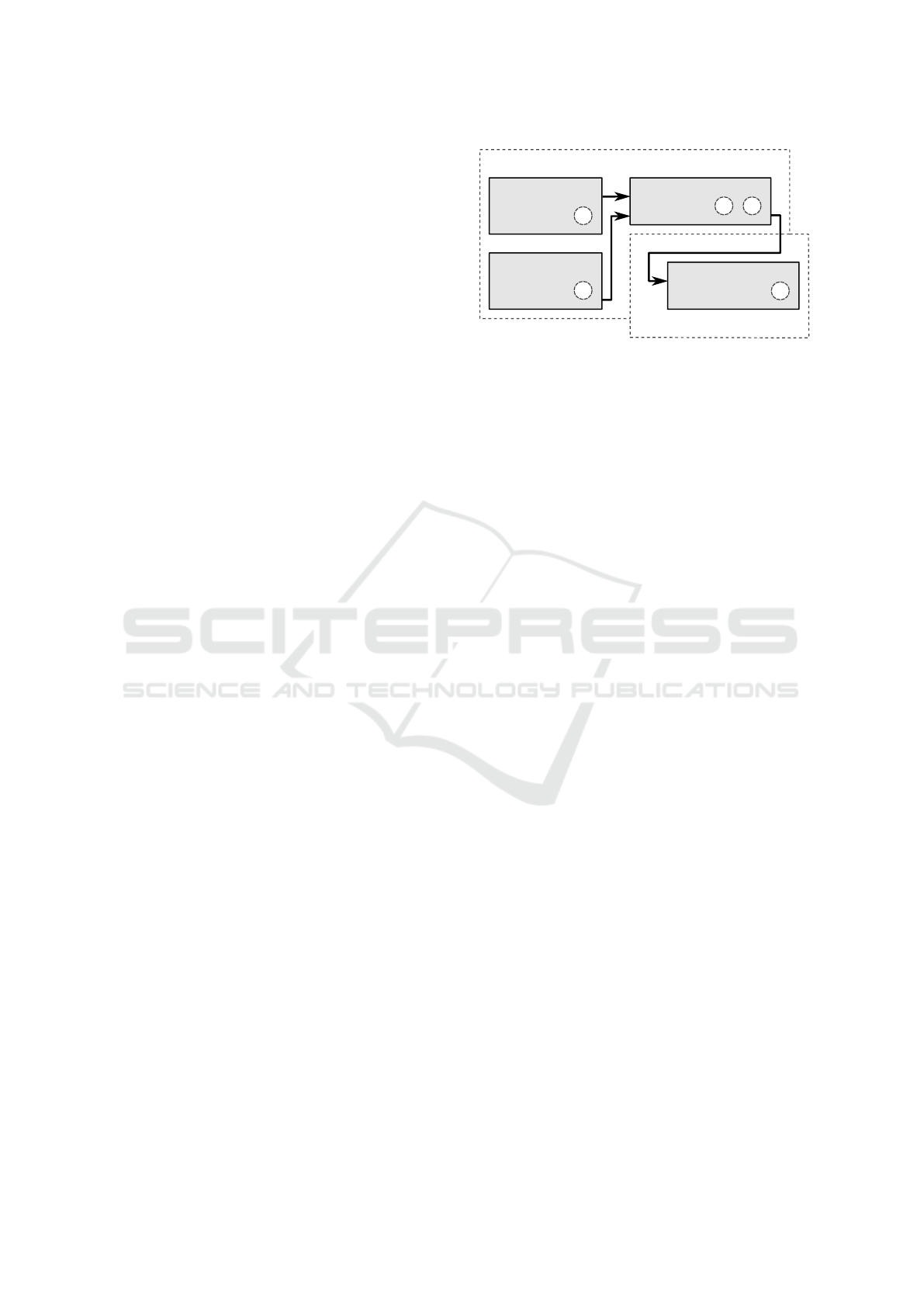
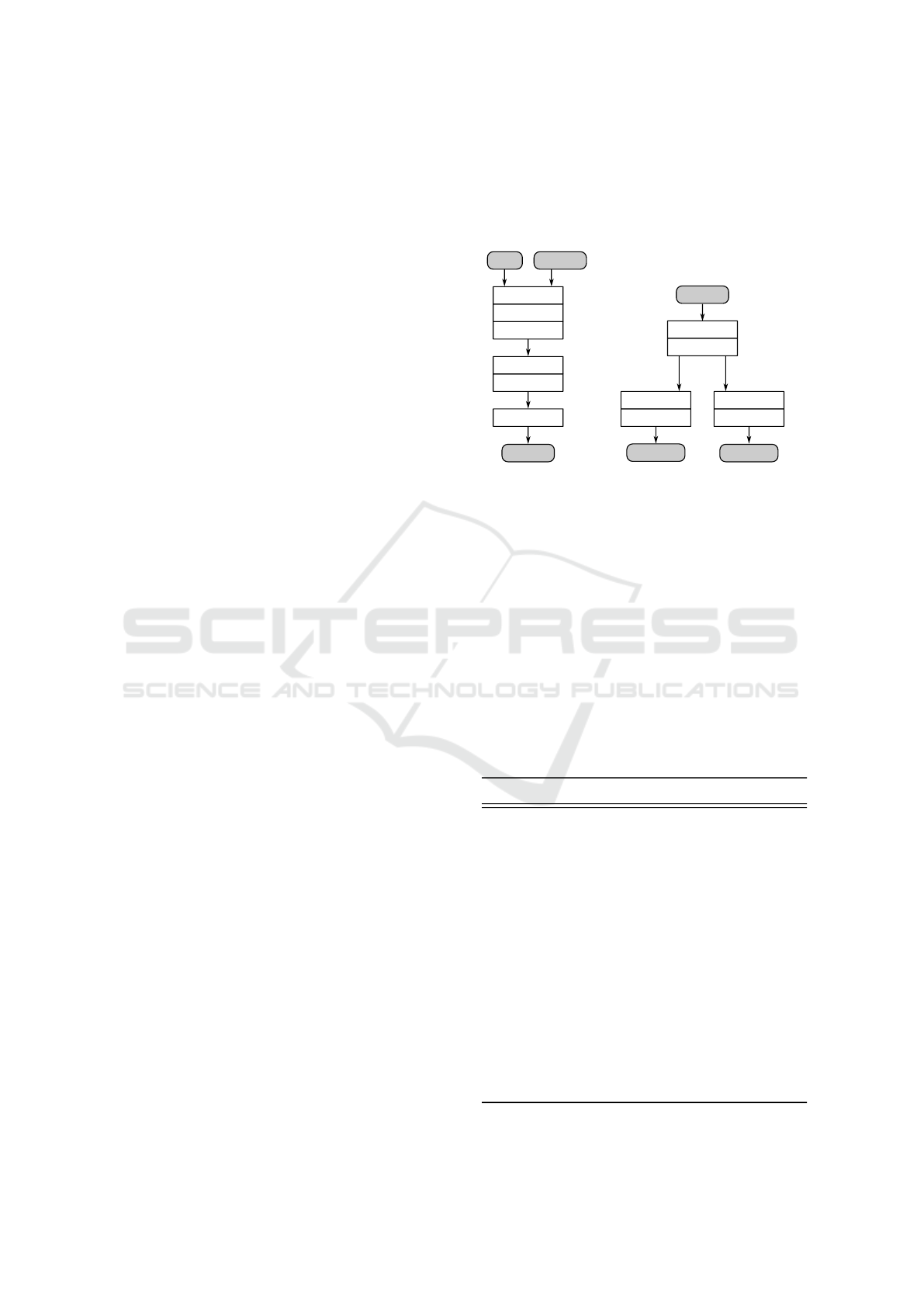
Figure 1: Data driven framework for controller parameter
optimization.
controller for the policy to collect experience samples.
Other methods such as (Solinas et al., 2024; Esrafilian-
Najafabadi and Haghighat, 2023) use transfer learning
to find a good initial control policy for online RL. On-
line system identification, as is done in (Hazan et al.,
2018) to learn a feedforward controller online would
also be applicable to our framework. These works
support our idea that a systematic and data-driven ap-
proach to finding an optimal controller requires the
controller to be adaptive to its specific environment.
Furthermore, these works illustrate the success of on-
line learning controllers in HVAC systems.
3 A FRAMEWORK FOR
OPTIMAL AND LEARNING
BASED CONTROL
In this section, we introduce a model-free framework
for automated data-enabled controller tuning (Fig-
ure 1). In particular, we do not make any assump-
tions on the dynamics of the system. The framework
is defined as three-stage process consisting of offline
controller optimization on heuristic setpoint profiles
(1a, 1b), offline controller optimization on data driven
generated setpoint profiles (2a, 2b), and learning an
adaptive controller online with setpoint stabilization
(3). Heuristic setpoint profiles (1a) are manually cho-
sen generic setpoint profiles representing the common
variation of setpoints expected for a given control de-
vice across different applications. While of the other
hand, one can collect time series information over long
periods of time from a particular device in the field.
Taking the example of an HVAC device like a control
valve for ventilation circuits, this data will contain set-
points profiles that vary with slowly evolving external
variables like seasons, pipe insulation changes, etc.
Thus, for device specific tuning we use a clustering
algorithm to group similar setpoint profiles. We can
then use these clusters to sample device specific, field
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
432
Setpoint
Profile
Internal
Controller
Unknown
Plant
Black-Box
Optimizer
Optimal
Parameters
Objective
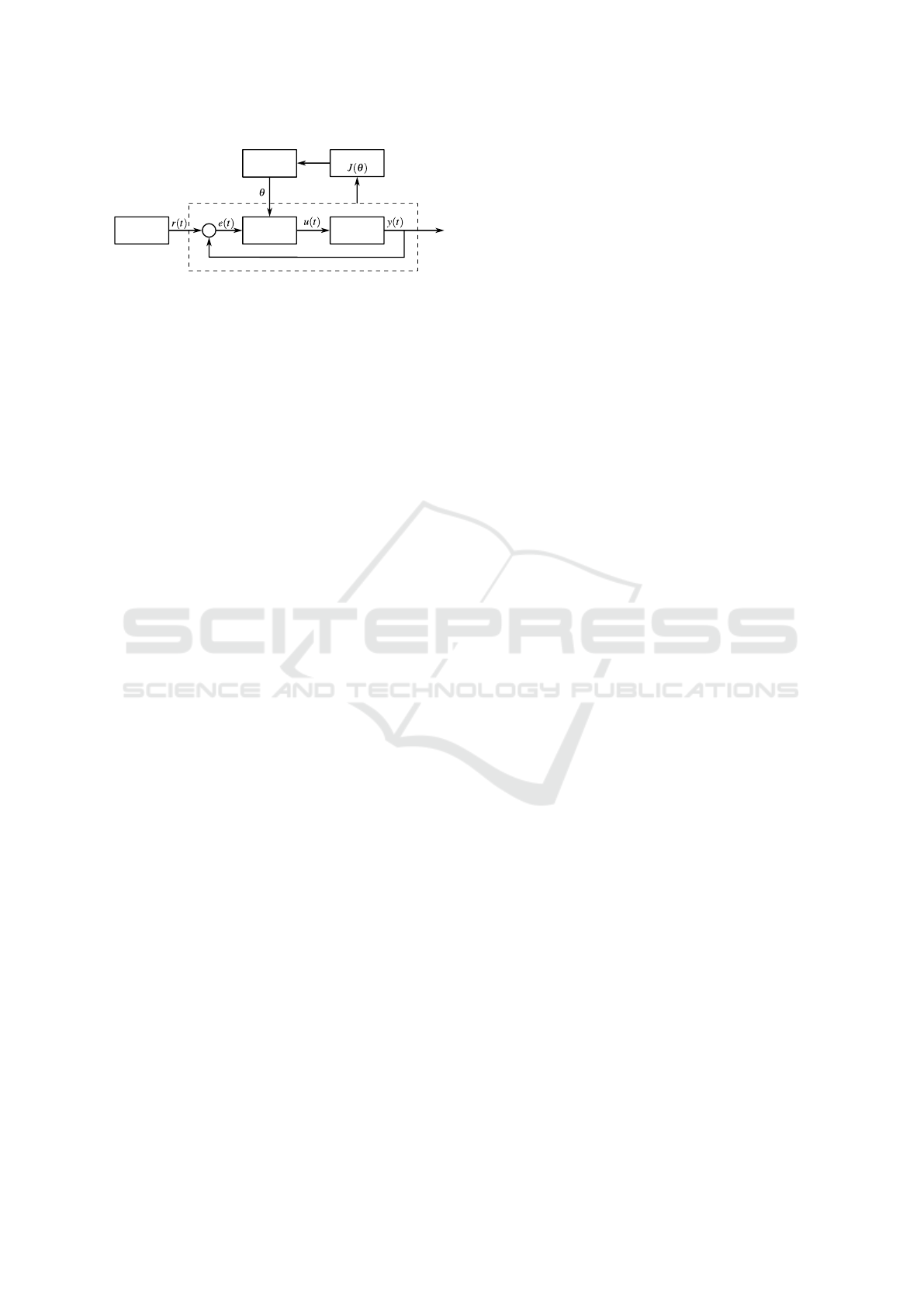
Figure 2: Schematic of closed-loop black-box optimization.
realistic setpoint profiles, and this is what we refer to
as clustered setpoint profiles throughout this paper.
In stage 1, we optimize the controller performance
(1b) over the heuristically chosen setpoint profile (1a),
while in stage 2 (2a-2b) we use a generated clustered
setpoint profile for the same. One can directly start
by optimizing on the clustered profiles, but since the
output of stage 1 is a general tuning which can serve as
a foundation to warm-start the optimizer, we refer to
device specific tuning as stage 2. Doing so, we ensure
optimal performance in their specific application. In
stage 3 we add an online learning component to the
offline tuned controller for adaptive control. We can
also use the optimization results after each step with-
out going through all optimization steps successively;
however, having the initial offline optimal controller
provides a stable base controller which can be lever-
aged by the learning-based controller for safe explo-
ration. Removing the learning-based controller does
not allow adaption to uncertain environments. There-
fore, all the three stages are complimentary to each
other.
3.1 Offline Optimization
We illustrate the black-box offline optimization in Fig-
ure 2. It uses a closed-loop simulation consisting of
a complex plant and an internal controller. The dy-
namics of the plant are assumed to be unknown to
the controller. Let
r(t)
denote the setpoint to the in-
ternal controller,
y(t)
denote the observations from
the system. Then we denote the parameterized con-
troller as
u(t) = f (r(t), y(t), θ)
with parameters
θ
. The
goal of the black box optimizer is to find the optimal
controller parameters
θ
∗
that minimize a performance
based objective function
J(θ)
calculated in the closed-
loop simulation. This objective function is calculated
over the duration of a setpoint profile and appears as
an oracle model to the black-box optimization routine.
In this work, the controller performance metric is
formulated as a multi-objective optimization problem
as shown in Equation (1). Where
ω
1
, ω
2
, ω
3
, ω
4
are the
weights for each term,
e
control
(t)
is the control error,
and
e
oscillation
(t) = e
control
(t)
during the oscillations
and 0 otherwise.
u(t)
is the parameterized controller as
defined before, and
D(t)
is the number of sign changes
of the first derivative of the control signal
u(t)
. The
first term is the Integral Time-weighted Absolute Error
(ITAE) (Stenger and Abel, 2022) and is chosen to
penalize overshoots. The second term is calculating
the total variation of controller output and is selected
to minimize oscillations in the control signal. The
third term is the ITAE measured during oscillations,
and final term ensures that we minimize the direction
changes due to sharp tuning of controller:
J(θ) = ω
1
Z
|te
control
(t)|dt
+ ω
2
Z
|u(t + 1) − u(t)|dt
+ ω
3
Z
|te
oscillation
(t)|dt
+ ω
4
Z
D(t)dt
(1)
By minimizing Equation (1) over controller parame-
ters
θ
we achieve the best balance between optimal
setpoint tracking, minimal controller movements and
oscillations.
For finding optimal controller parameters using a
sophisticated simulation, only black-box optimization
methods apply, since differentiating the objective in
Equation (1) with respect to the controller parameters
is intractable. Furthermore, the performance evalua-
tion of each parameter configuration requires a simu-
lation run, which may be computationally expensive.
Therefore, we choose BO in our framework, as it is
particularly suitable to cases where evaluation of the
objective is expensive. While BO excels at finding
minima across a broad non-convex search space, it
might not get as close as desirable to the identified
minimum. Hence, we use BO to identify a promising
region in the search space and refine the result using
the Nelder-Mead simplex algorithm afterward.
We use a Radial Basis Function kernel added to
a white kernel for Gaussian Process regression with
the Upper Confidence Bound acquisition function. A
detailed treatment of BO can be found in (Rasmussen
and Williams, 2005). To further improve the controller
performance, we employ the Nelder-Mead simplex op-
timization method (Gao and Han, 2012) and initialize
with the best parameters found by BO.
3.2
Data Driven Controller Optimization
Thus far, we assume that the controllers’ performance
is evaluated on a simulation using a heuristically cho-
sen setpoint profile. This may lead to overfitting since
the final controller parameters may be optimal for the
heuristically chosen setpoint profile, but suboptimal
when the device is used in the real world.
Integrated Data-Driven Framework for Automatic Controller Tuning with Setpoint Stabilization Through Reinforcement Learning
433

Since more and more devices are connected to the
cloud and make their setpoint data available to system
integrators and device manufacturers, we additionally
analyse historical data of controller setpoint signals to
further enhance the suitability of the optimal param-
eters to real-world applications. We aim to optimize
the controller parameters of each device for its specific
environment. To this end, we need to identify typi-
cal device specific setpoint profiles and then tune the
controller parameters while avoiding overfitting. We
employ the following steps to overcome this issue:
1.
Data preprocessing followed by dimensionality re-
duction of the setpoint profiles using an autoen-
coder.
2.
Clustering the samples in the latent space of the
autoencoder. The cluster centers represent the most
typical example of each setpoint profile cluster.
3.
Choosing the two setpoint profiles closest to the
cluster center for each cluster, one to be used for
training and one for testing.
4.
Applying the optimization method of the previ-
ous section to the training set to obtain controller
parameters. Check if the final controller also per-
forms well on the test set and keep them if that is
the case.
We will now elaborate on the details of steps 1-3.
3.2.1 Data Preprocessing & Dimensionality
Reduction
The cloud data may be just one long setpoint time
series that spans over multiple years. The best prepro-
cessing method depends on the device and application.
We suggest splitting up the data by day and ensuring
that all samples are of equal length, such that the pre-
vious assumption holds. One way to achieve this is
by splitting the cloud data up by day and cropping or
padding the samples such that we obtain a dataset with
samples of equal length.
We expect that there is a set of unknown factors that
lead to several classes of setpoint profiles that share
some similarities within each class. Hence, we want
to reduce the dimensionality such that only informa-
tive dimensions are kept. Downstream, the clustering
algorithms will primarily operate on informative data,
which leads to more informed clustering. We use stan-
dard autoencoders in our approach (Goodfellow et al.,
2016).
Autoencoders: are artificial neural network architec-
tures that learn a mapping from high dimensional data
to a low dimensional representation as well as an in-
verse mapping. We define two mappings
f
θ
: R
n
→ R
c
and
g
φ
: R
k
→ R
n
where the encoder with parameters
θ
by is denoted by
f
θ
and the decoder with parameters
φ
is denoted by
g
φ
. The data dimension is
n
and the
latent dimension of the encodings is
c
and we assume
that
n ≪ c
. In general terms, we can take a sample
x
∈ R
n
and use the encoder to get a low dimensional
representation z
= f
θ
(
x
)
. We can approximately re-
cover the input sample x
≈
˜
x = g
φ
(
z
)
. The autoencoder
is trained by minimizing the reconstruction error
L
(AE)
(X, φ, θ) =
1
n
n
∑
i=1
x
(i)
− f
θ
g
φ
(x
(i)
)
2
2
. (2)
The mathematical program is given by
θ
∗
, φ
∗
= argmin
θ,φ
n
L
(AE)
(X, θ, φ)
o
. (3)
We train an autoencoder on the real world setpoint
profiles to get encodings z
(i)
= f
θ
x
(i)
. We minimize
the mathematical program in Equation (3) using the
Adam optimizer. Once the encodings are obtained, we
can proceed with clustering.
3.2.2 Centroid Clustering
Next we find representative setpoint profiles by clus-
tering the latent encodings z
(i)
. Let
k ∈ N
+
denote the
number of setpoint profile types. Clustering techniques
in general group the input samples into
k
subsets such
that the distances within clusters are minimized accord-
ing to some measure. Centroid based methods proceed
by finding
k
cluster centers such that the distances to
the centroids are minimized for each corresponding
subset. We use the classic
k
-means algorithm (Mac-
Queen, 1965) for setpoint profile clustering.
Choosing Setpoint Profiles for Parameter Optimiza-
tion. The goal of our framework is to find controller
parameters systematically and avoid overfitting to spe-
cific setpoint profiles. To this end we follow a standard
approach in machine learning. We construct a train-
ing set and a test set. The training set is used by the
optimization procedure to find the optimal controller
parameters. The test set is used only in the end to
check that the controllers still perform well on new,
unseen setpoint profiles.
For each cluster we select the two samples that are
nearest to their respective cluster center, and add one
sample to the train set and the other sample to the test
set. We chose the BO hyperparameters manually as
outlined in Section 3.1 and found them to be satisfac-
tory; therefore, we did not perform hyperparameter
optimization.
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
434
3.3 Learning Based Online Adaptive
Control & Setpoint Stabilization
At this point, we have a controller which is optimally
tuned based on whatever existing knowledge and data
we had collected from the system. But in practical
scenarios the controller device may be subjected to
unprecedented scenarios for which the existing tuning
may be suboptimal. In this section, we’ll consider
the example of a real HVAC system and motivate the
requirement for an online learning component as the
final stage of the framework presented.
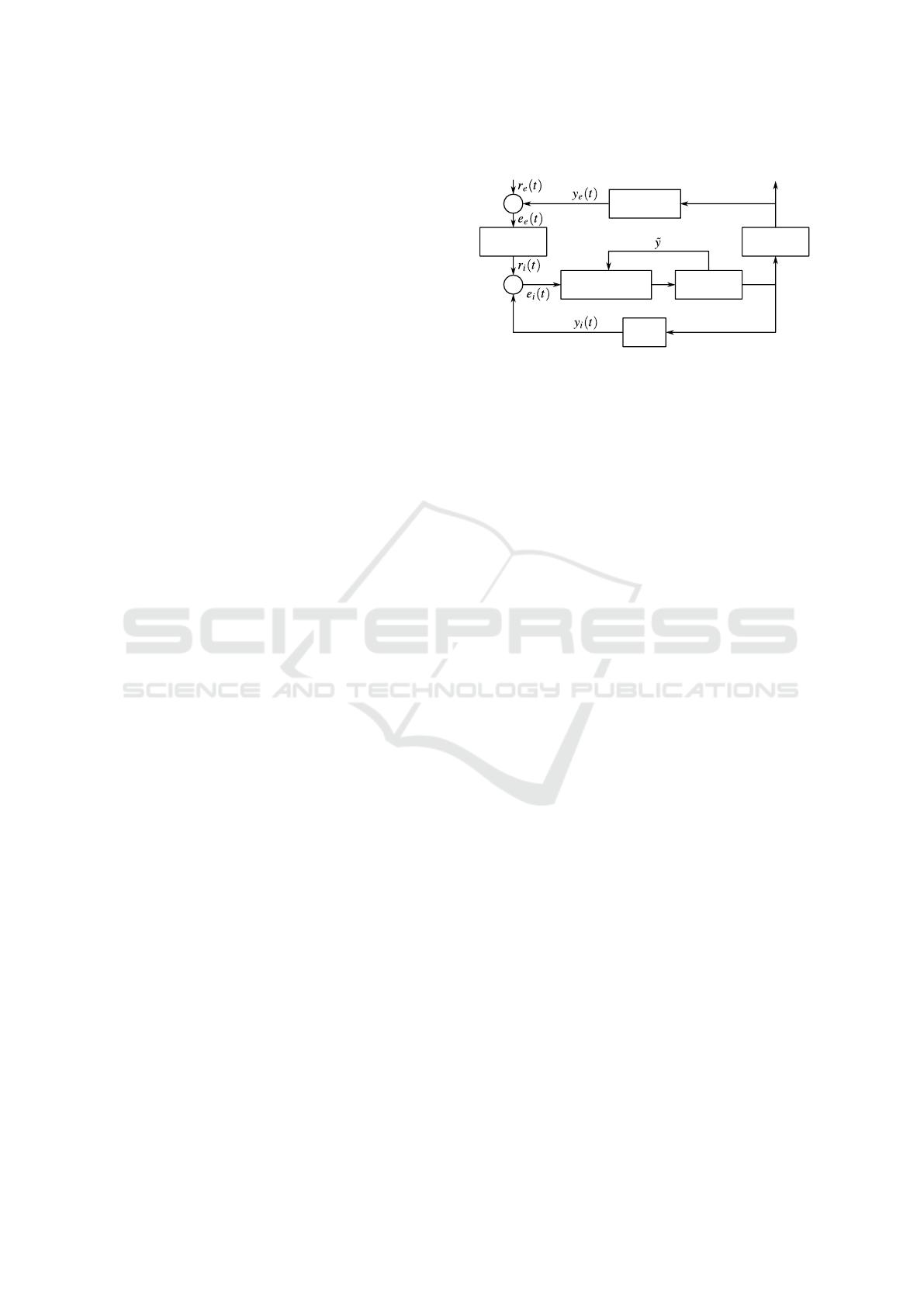
Figure 3 depicts the block diagram of a hydraulic
circuit based air supply temperature control system
for indoor heating and cooling systems. The external
controller, which can be a room temperature control
unit, receives a temperature setpoint
r
e
(t)
from the
user and translates it to desired flow rate
r
i
(t)
for a
heating/cooling fluid flowing through the hydraulic
circuit. This flow setpoint is sent to a control valve,
referred to as the internal controller, with an actuator
attached to the hydraulic circuit. Controlling the flow
rate controls the amount of heat transferred through the
heat exchanger, thus controlling the outlet temperature
as a result. The heat exchanger’s dynamics is very
hard to model and is often unknown.
Observe that the error in temperature tracking
(
e
e
(t)
) is directly affected by the valve, which means
that the control signal of the valve actually has an
unknown coupling relationship with the external con-
troller and; therefore, with its own setpoint. There-
fore, it is possible for the controller to destabilize the
setpoint itself. Furthermore, time varying field condi-
tions, diverse hydraulic circuit setups across different
environments and other external factors can introduce
uncertainties which render the offline optimized pa-
rameters suboptimal. These limitations highlight the
inadequacy of offline controller optimization alone
and underscores the need for an adaptation strategy
to effectively tackle the challenges of dynamic envi-
ronments. This adaptation is achieved in data-driven
manner through online learning.
We achieve this by augmenting the offline learned
control law
f (r
e
(t), y
e
(t), θ
∗
)
with an online learned
control policy
g(r
i
(t), ˜y(t), φ)
, henceforth referred to
as the auxiliary controller. The terms
f (·), θ
∗
were
defined in Section 3.1, and
φ, ˜y(t)
represent the param-
eters and input observations of the auxiliary controller
for this and the following sections. Note that
˜y(t)
is multidimensional and contains informative signals
like the flow meter feedback
y
i
(t)
, the flow tracking
error
e
i
(t)
, and much more depending on the auxil-
iary controller design. Since in this paper it represents
information obtained from the hydraulic circuit, it is
External
Controller
Internal
Controller (RL)
Hydraulic
Circuit
Heat
Exchanger
Flow
Meter
Temperature
Sensor
Temperature
Setpoint
Outlet
Temperature
Figure 3: Block diagram of a cascaded control loop for
temperature control.
illustrated as data flowing from the hydraulic circuit to
the RL agent in Figure 3. The final control signal from
the internal controller can be expressed as:
u(t) = f (r
e
(t), y
e
(t), θ
∗
) + g(r(t), ˜y(t), φ). (4)
3.3.1 Optimization Objective & Setpoint
Stabilization
To learn the control policy
g
online, we need to define
an objective to minimize for the online learning algo-
rithm. RL works in a discrete-time control setting and
requires a stage cost definition much similar to that of
model predictive control. To retain the performance
objectives discussed in Section 3.3.1, the following
stage cost is considered
J
k
(φ) = λ
1
∥e
k
∥
2
+ λ
2
F
osc,k
+ λ
3
F
dir,k
+ λ
4
J
set,k
(φ)
(5)
where
e
k
is the tracking error at time step
k
, and
λ
i
for
i = 1, ·· · , 4
are the weights of each cost component.
The functions F
osc,k
and F
dir,k
are defined as follows
F
osc,k
=
(
1 if actual flow is oscillating at time k,
0 otherwise
(6)
F
dir,k
=
(
1 if ˙u(t) changed sign at time k,
0 otherwise
(7)
where
˙u(t)
denotes the first order time derivative of the
control signal. These functions penalize the control
policy if it tries to make too many direction changes,
or makes the flow through the control valve oscillate.
J
set,k
(φ) is a term added to enforce setpoint stability.
Setpoint stability in this case is viewed in the sense
of how quickly the setpoint varies with time. There-
fore, we quantify the variation in setpoint signal and
use it as the penalty term. Let r
ref,t
denote the desired
setpoint signal at time
t
, a straightforward choice for
quantifying variation is to use the magnitude of the
Integrated Data-Driven Framework for Automatic Controller Tuning with Setpoint Stabilization Through Reinforcement Learning
435

first and second-order derivatives of the reference sig-
nal:
d
dt
r
ref,t
p
, and
d
2
dt
2
r
ref,t
p
, where
∥ · ∥
p
denotes
the p-norm of some vector.
In our experiment we use the 2-norm of the first
order finite difference approximation for the derivative
and use Equation (8) as the penalty term.
J
set,t
(φ) =
∥
r
ref,t
− r
ref,t−1
∥
2
(8)
Among all available approaches for online learning
we choose RL for its capability to handle arbitrary
reward functions through policy search algorithms.
In this paper we use the Soft-Actor Critic (SAC) RL
algorithm (Haarnoja et al., 2018) which is currently
state-of-the-art. Due to its off-policy nature SAC is
sample efficient. Furthermore, SAC maximizes the
entropy of the action policy which ensures that the
policy does not place all probability mass on a single
action in some states leading to better exploration and
regularization in policy updates.
The central goal of RL is to find a control pol-
icy that minimizes the discounted infinite horizon ex-
pected cost at a given time step t
J(φ) =
∞
∑
k=t
γ
k−t
J
k
(φ). (9)
where
γ
denotes the discount factor and is a commonly
used notation in RL literature. Note that the time
weighing of the ITAE terms is captured through
F
osc,k
and
F
dir,k
but a constant penalty of 1 is used instead
of the errors to ensure that the policy gradients do not
take unbounded values to ensure numerical stability.
For ensuring stable policies we keep
gamma
close to
1 (Recht, 2018). The exact definition of the overall
cost optimized by SAC is stated in Appendix A of
(Haarnoja et al., 2019). For an in-depth treatment of
reinforcement learning, we refer the reader to (Sutton
and Barto, 2020).
4 EXPERIMENTAL RESULTS
The aim of our experimental evaluation is to demon-
strate the successful application of the presented
model-free offline tuning and online adaptation con-
troller framework to a realistic scenario. We consid-
ered the outlet temperature control system from Fig-
ure 3 and implemented it in the MATLAB
®
Simulink
©
simulation environment. We modeled a water hy-
draulic circuit which controls the temperature of air
supplied through the heat exchanger at the outlet using
an isothermal valve. For custom component modelling
of the hydraulic circuit and the heat-exchanger we used
the Simscape
©
modelling language (The MathWorks
Inc., 2024). The heat-exchanger we used in this work
is modelled according to (Fux et al., 2023). The heat
exchanger and other simulated models, including the
isothermal valve, the hydraulic circuit pipes, fluid in-
take reservoirs, etc. were verified to match with their
real-world counterparts. Refer to Section 3.3 for a
brief description of the control problem.
The actuator position is specified in the range of
[0, 1]
where
0
denotes completely closed and
1
denotes
fully open. The external controller is a PI controller
which takes the error in outlet temperature and gives
a relative water flow setpoint to the valve (internal
controller). For the physical definition of relative water
flow, the reader is referred to (Zhang et al., 2022).
The offline optimization with BO and Nelder-Mead
is implemented in python. We call Simulink
©
to ex-
ecute the simulation and obtain the objective values,
which are then passed back to the optimizer in python.
Setpoint profile dimensionality reduction and cluster-
ing is also implemented in Python and then exported
to Simulink for validation. Details on the RL imple-
mentation follow in Section 4.3.
4.1 Automated Tuning with Heuristic
Setpoint Profiles
This section introduces the results obtained during
offline optimization with empirically derived heuristic
profiles as shown in Figure 1 (part 1).
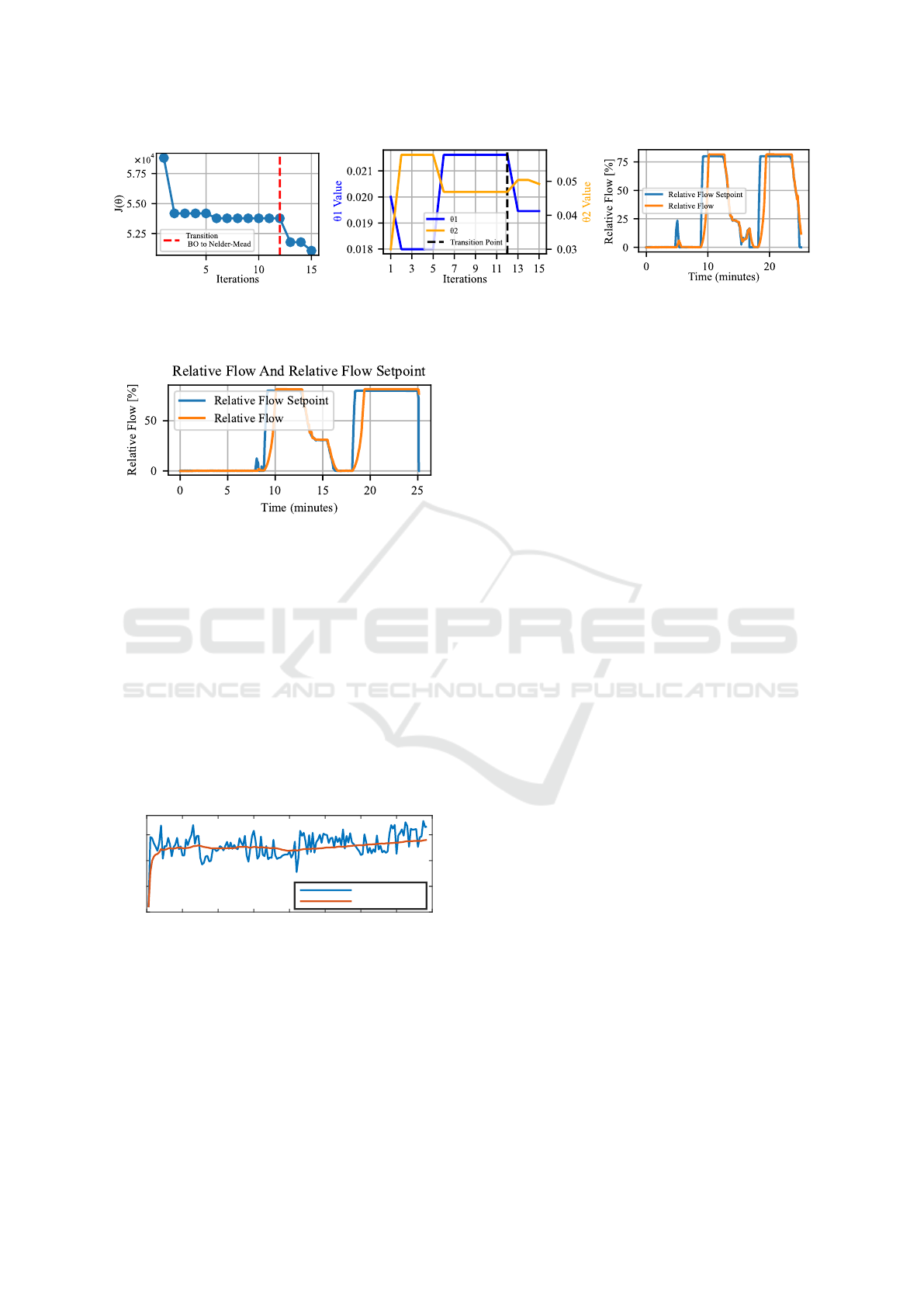
As an initial step in our optimization process we
had to identify the optimal weights for Equation (1).
To balance the contribution of each design objective in
this cost function, we defined an additional objective
function that scales each component by its correspond-
ing weight and aims to minimize the variance among
the scaled components. See the Appendix for detailed
results. We used these aligned weights to guide both
the initial and subsequent optimization phases. By
minimizing the variance of the scaled components, we
made sure that no design objective dominated and en-
sured that the optimization process can explore the
parameter space. This optimization progress is shown
in Figure 4a.
Figure 4b illustrates further modification of the
parameters due to Nelder-Mead. Although this devel-
opment does not have a strong impact on our objective
function, it shows that our algorithm is searching to-
wards potential better values to further minimize our
non-penalized terms of objective function.
The optimized controller’s performance on the
heuristic stepwise setpoint profile, as illustrated in Fig-
ure 4c demonstrates stable setpoint tracking with low
response times and no oscillations.
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
436
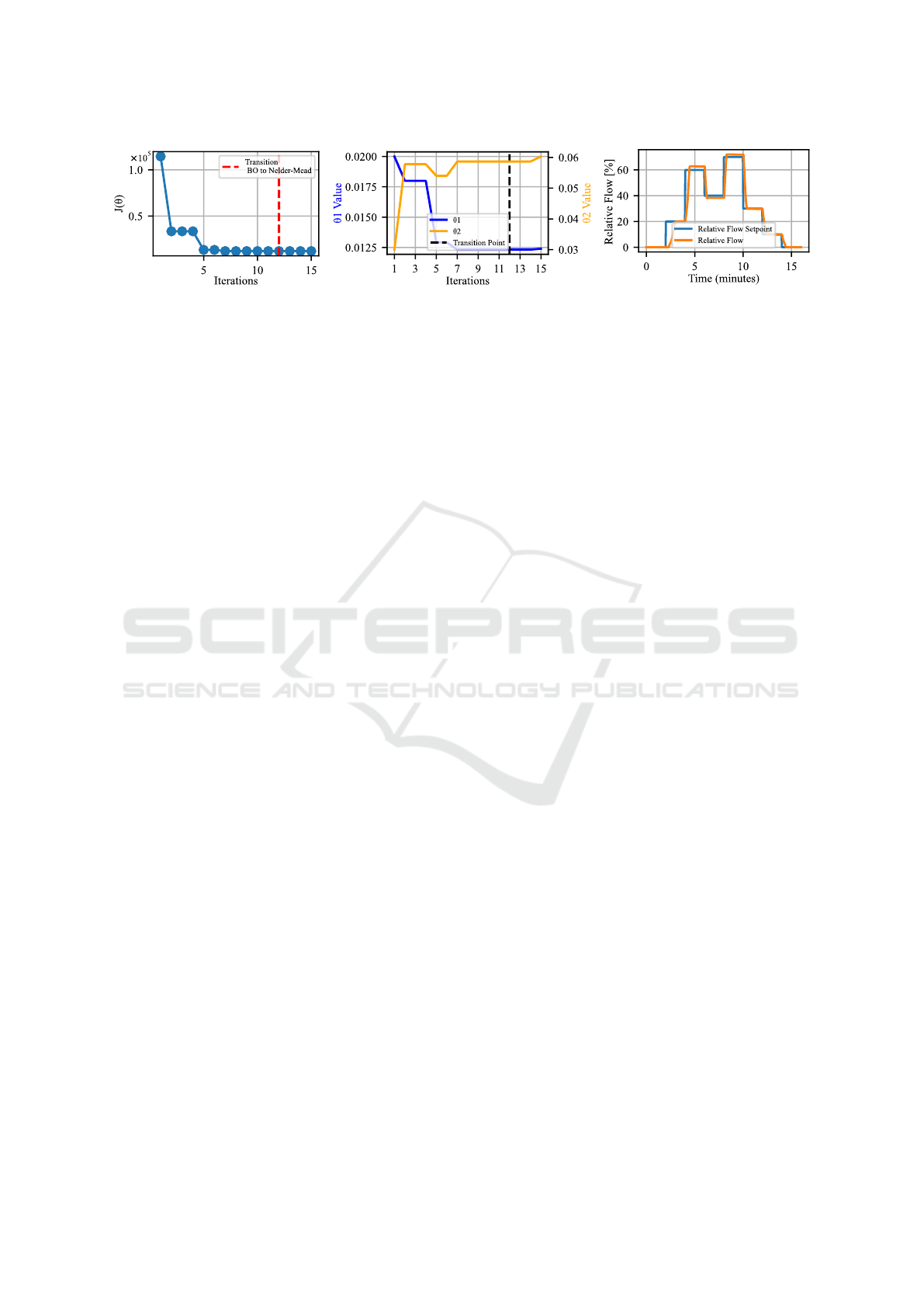
(a) (b) (c)
Figure 4: Experimental results, heuristic setpoint profile. (a) Progress of objective function during optimization. (b) Progress of
tuning parameters. (c) Controller performance after optimization on a heuristic setpoint profile.
4.2 Automated Tuning with Clustered
Setpoint Profiles
In this section we present our results from applying
black-box optimization on clustered setpoint profile
as discussed in Section 3.2. The first step involves
clustering of typical setpoint profiles collected over a
year. We use a single fully connected layer for both
the encoder and decoder neural networks. We refer
the reader to the appendix for a description of the au-
toencoder and its training setup. Here the combination
of 4000 epochs and a dimensionality of 4 yielded the
best results (see Figure 11a and Figure 11b). We cal-
culate the optimal number of clusters by applying grid
search using the silhouette score. Figure 5a shows the
improvement in the cost function with optimization
steps.
In Figure 5b the progress of the controller parame-
ters is illustrated. Especially noticeable is the further
optimization towards a minimum during the Nelder-
Mead phase. After the final optimization of the param-
eters, the performance of the controller on a clustered
setpoint profile is shown in Figure 5c.
Furthermore, to examine how well these parame-
ters generalize, we test them on our clustered setpoint
signal generated for the testing phase. The flow track-
ing results shown in Figure 6 demonstrate satisfactory
tracking performance.
4.3 Reinforcement Learning
This section presents the results attained by applying
SAC, by directly connecting it to the hydraulic circuit
simulation in closed-loop feedback. We do not assume
any form of pre-training on the actor model since our
objective is to demonstrate that a suitably exploring
RL policy such as SAC can learn to control the flow
setpoint in an online setting. Therefore, our configura-
tion corresponds to the scratch configuration of online
RL as described in (Zhang et al., 2023).
The objective function from Equation (5) was im-
plemented using standard blocks and functions in
Simulink. For implementing RL, we used the Rein-
forcement Learning Toolbox
©
from MATLAB
®
(The
MathWorks Inc., 2024). Due to the toolbox being
specifically suited for episodic RL instead of online
RL, we carried out the experiments in the episodic
setting. However, note that demonstrating success-
ful learning and control performance through episodic
learning is equivalent to proving it in the online setting.
This is because the algorithm employed is an off-policy
RL strategy that updates the policy network at every
step of the environment episode by uniformly sam-
pling a minibatch of data from a circular experience
buffer. In fact, if we just assume that the initial condi-
tion of every new episode is the exact same as where
the previous episode ended, then the chain of episodes
is indistinguishable from online learning. It is because
of this reason that time weighing is not considered for
the oscillation error term, otherwise, this equivalence
to online RL will no longer hold. One important dis-
tinction between episodic and online learning is that
when the episodes start with a random initial condition
the samples from episodic learning cover a large por-
tion of the distribution since random explorations in
online learning can only be in the neighborhood of the
current state. Thus episodic learning in this sense may
lead to faster convergence to the optima.
The RL agent is integrated with the system such
that its actions are added to the base PI flow con-
troller’s signal according to Equation (4). This addition
allows the base PI controller to act like a pre-stabilizer
to the system when the initially untrained SAC policy
behaves like white noise making sure that the system
doesn’t exhibit dangerous behavior. Note that the base
PI controller parameters are obtained from the offline
optimization step, and for this experiment, we used
heuristic setpoint profiles.
The set of observations to the RL agent comprised
of the current error, the current setpoint, and the cur-
rent control input calculated by the base PI controller.
To allow the agent to learn to predict the system dy-
namics, and to make sure it receives the full set of
Integrated Data-Driven Framework for Automatic Controller Tuning with Setpoint Stabilization Through Reinforcement Learning
437
(a) (b) (c)
Figure 5: Experimental results, clustered setpoint profile. (a) Progress of objective function during optimization. (b) Progress
of tuning parameters. (c) Controller performance after optimization on a clustered profile from the training set.
Figure 6: Controller performance after optimization on a
clustered profile from the test set.
information due to the non-markovianity induced by
non-linearities like deadzones and stiction, we also
feed the last 4 observations as input to the actor and
the critic networks. The base PI controller’s output
is given as an input in order to allow the RL agent
to learn its trends and make adjustments to yield an
overall optimal signal. Finally, note that the mean of
the actor distribution is allowed to be in the range of
[−1, 1]
to allow it to completely modify the PI flow
controller’s control signal which lies in the range of
[0, 1]
. A saturation function is applied to the final con-
trol signal from Equation (4) to restrict it in the valid
range of [0, 1].
0 20 40 60 80 100 120 140 160
Episode Number
-800
-600
-400
-200
Episode Reward
Episode Rewards
Average Rewards
Figure 7: Episode reward trend along with the average return.
Figure 7 shows the trend of the variation in total
cost throughout the episode. It can be observed that
the algorithm improves rapidly in the initial episodes
and then seems to plateau when it cannot learn further
based on the information provided. Being an entropy
maximizing algorithm one observes consistent gradual
improvement even after 160 episodes (approx. 2.8M
samples).
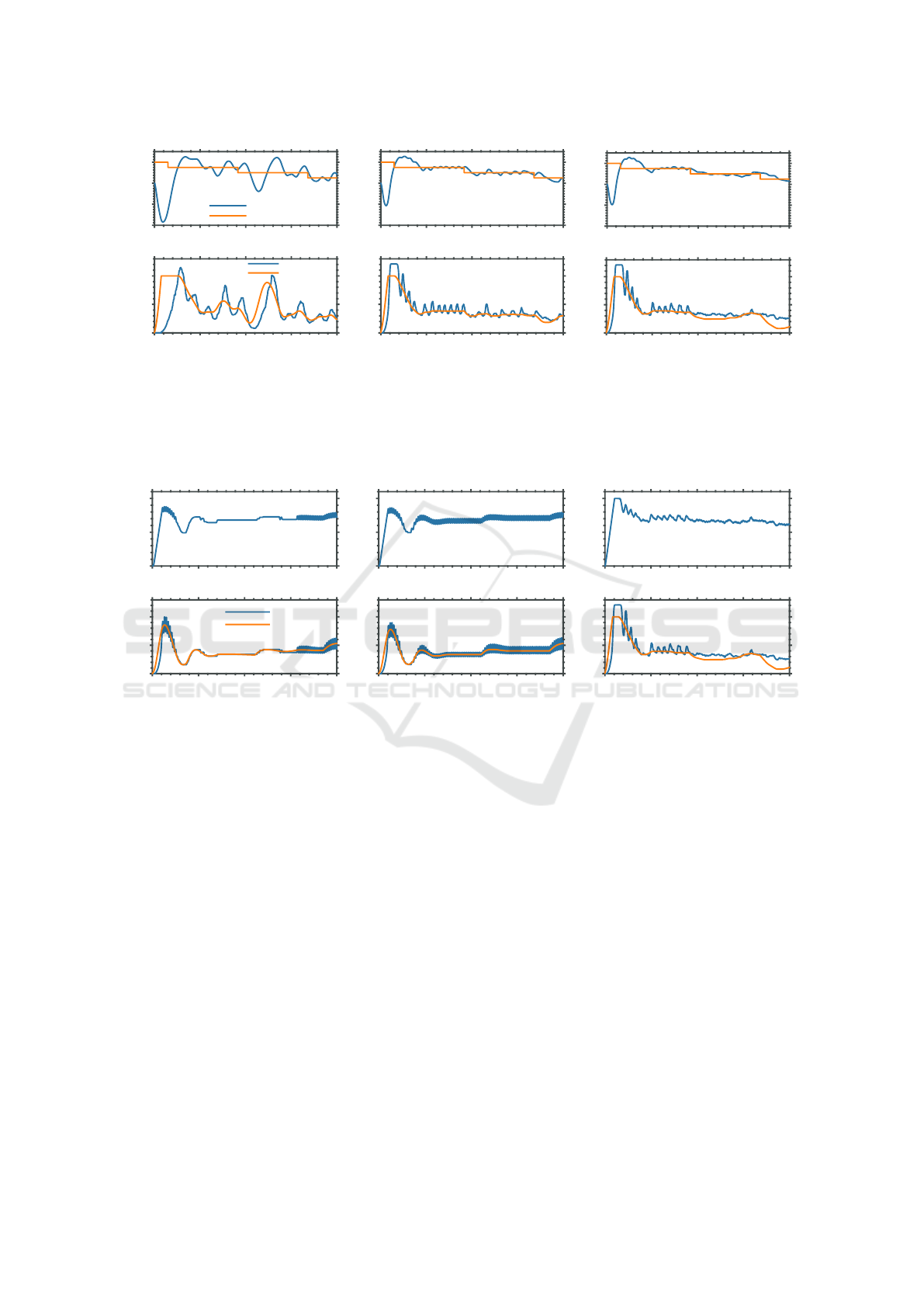
Figure 8 shows the comparison between the closed
loop control response of the trained and untrained SAC
agents, demonstrating the improvement in setpoint
tracking performance as training progresses. A com-
parison between the setpoint tracking performance of
the offline optimized PI flow controllers and the con-
troller with the online optimized RL agent added to
it is shown in Figure 9. The error signal fed to the
RL and the PI controller encounters a deadzone near
the zero-point. This non-linearity leads to the error
being zero near the setpoint which is why the RL agent
doesn’t get penalized for small oscillations. The di-
rection change and oscillation terms make up for this
shortcoming and lead to gradual improvement in re-
moving oscillatory behavior by the agent. See the
Appendix for the SAC hyperparameters configuration
and the actor-critic network architectures used in the
experiments.
5 CONCLUSION
In this paper, we presented a data-driven model-free
framework for automatic controller tuning and online
adaptation with setpoint stabilization in coupled sys-
tems. We experimentally demonstrated that our ap-
proach works on realistic scenarios in unknown sys-
tems with undetermined coupling relationships and
is, therefore, applicable to a broad range of practical
systems. We also showed that the last step of further
optimizing the controller online to its specific environ-
ment is crucial to obtain a better performing controller.
Our example of a cascaded control system is om-
nipresent in HVAC systems, and is applicable to a
large variety of systems encountered in control sys-
tems design. It is well known that such systems of
cascaded controller configurations quickly become un-
stable and traditional solutions which rely on adjusting
their time-constants to differ by an order of magnitude
are not optimal. We believe that the notion of learn-
ing to stabilize the control setpoint and minimize a
cost function with online learning is a key ingredient
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
438
0 450 900 1350 1800
12
16
20
24
Temperature (°C)
Temperature
Temperature Setpoint
0 450 900 1350 1800
Time (seconds)
0
0.5
1
Relative Flow
Water Flow
Flow Setpoint
(a) Agent after episode 2.
0 450 900 1350 1800
12
16
20
24
Temperature (°C)
0 450 900 1350 1800
Time (seconds)
0
0.5
1
Relative Flow
(b) Agent after episode 137.
0 450 900 1350 1800
12
16
20
24
Temperature (°C)
0 450 900 1350 1800
Time (seconds)
0
0.5
1
Relative Flow
(c) Agent after episode 157.
Figure 8: Setpoint tracking performance comparison of the RL agent at different phases in the training. The labels mention the
number of episodes the agent has been trained for. Observe how the agent first learns to minimize the error and eventually
reduces the number of actuator oscillations. Each plot shows the supply air temperature tracking the temperature setpoint (top)
and the flow setpoint with the actual water flow (bottom). In all cases the trained trained policy is still sampling actions from
the random distribution.
0 450 900 1350 1800
0
0.5
1
Controller Output
0 450 900 1350 1800
Time (seconds)
0
0.5
1
Relative Flow
Water Flow
Flow Setpoint
(a) Heuristic setpoint profiles trained PI.
0 450 900 1350 1800
0
0.5
1
Controller Output
0 450 900 1350 1800
Time (seconds)
0
0.5
1
Relative Flow
(b) Clustered setpoint profile trained PI.
0 450 900 1350 1800
0
0.5
1
Controller Output
0 450 900 1350 1800
Time (seconds)
0
0.5
1
Relative Flow
(c) RL agent on top of PI.
Figure 9: Setpoint tracking performance comparison of the controllers obtained after the 3 different stages. The RL agent
is operating on top of the clustered profile trained PI flow controller. Note that the currently used setpoint profile is quite
different from the ones considered for the PI base controller in stages 1 and 2. The training profiles were changing stepwise for
which the PI controllers learned to converge as fast as possible without oscillations due to Equation (1). Thus, they are too
sharply tuned for the smooth and continuous flow stepoint they receive from the temperature controller which leads to the
oscillations observed in (a) and (b). The RL agent adapts to this new unseen profile and, therefore, performs better than the
offline optimized parameters after being trained online as can be seen in (c) which validates the requirement for online learning.
towards optimal control and adaptation in an online
setting. We do not claim that our combination of al-
gorithms for each step of the framework is the best,
since there are several more combinations of offline
and online policies learned through other strategies
which may be better. However, this work is an impor-
tant step towards achieving optimal online adaptive
control and presents a new paradigm for data-driven
controller design.
5.1 Future Work
For this work, we applied our optimization on a sim-
ulated hydraulic circuit without any variations. To
achieve a more generalized final solution, we plan
to introduce variations into our plant and expand our
scope by exploring other application types, such as air
or refrigeration applications.
This work trained an RL agent from scratch by
applying it directly to the system in a closed loop set-
ting. It is worth exploring other strategies such as
actor-critic pre-training on base controller data before
gradually deploying the RL Policy as done in (Soli-
nas et al., 2024). Furthermore, several strategies like
imitation learning on offline data, policy expansion of
offline trained policies by bridging them with online
trained policies, etc. are worth exploring as discussed
in (Zhang et al., 2023).
Integrated Data-Driven Framework for Automatic Controller Tuning with Setpoint Stabilization Through Reinforcement Learning
439

The problem of instability in cascaded controllers
also extends to the setting of networked control sys-
tems. To take an example from the setting presented in
this paper, oftentimes several temperature control units
send flow setpoints to multiple flow control valves
which are connected to the same hydraulic circuit and
thus have unknown physical coupling effects between
each other thus rendering any single-agent control law
suboptimal and potentially destabilizing. It may thus
be interesting to learn the physical dependencies of the
cascaded controllers and leverage this information to
stabilize such controller networks. This directly leads
the research in the direction of multi-agent reinforce-
ment learning. We propose to continue research on
these ideas and extend the framework we present in
this work accordingly.
ACKNOWLEDGEMENTS
We are indebted to Volkher Scholz for his many in-
valuable ideas and insights which helped shape the
contents of this paper and for proofreading several
drafts of this paper. We further extend our gratitude
to Stefan Mischler for his support and helpful advice,
enabling us to achieve the presented results. Also we
would be remiss not to thank the team at MathWorks
who helped us out with many helpful clarifications and
support. Last but not least, we would like to thank
our colleagues for many stimulating and motivating
discussions.
REFERENCES
Ahmad, M. A., Ishak, H., Nasir, A. N. K., and Ghani, N. A.
(2021). Data-based pid control of flexible joint robot us-
ing adaptive safe experimentation dynamics algorithm.
Bulletin of Electrical Engineering and Informatics.
Cohen, G. H. and Coon, G. A. (2022). Theoretical Considera-
tion of Retarded Control. Transactions of the American
Society of Mechanical Engineers, 75(5):827–834.
Esrafilian-Najafabadi, M. and Haghighat, F. (2023). Trans-
fer learning for occupancy-based HVAC control: A
data-driven approach using unsupervised learning of
occupancy profiles and deep reinforcement learning.
Energy and Buildings, 300:113637.
Fiducioso, M., Curi, S., Schumacher, B., Gwerder, M., and
Krause, A. (2019). Safe contextual bayesian optimiza-
tion for sustainable room temperature pid control tun-
ing. In Proceedings of the Twenty-Eighth International
Joint Conference on Artificial Intelligence, IJCAI-19,
pages 5850–5856. International Joint Conferences on
Artificial Intelligence Organization.
Fux, S. F., Mohajer, B., and Mischler, S. (2023). A compari-
son of the dynamic temperature responses of two differ-
ent heat exchanger modelling approaches in simulink
simscape for HVAC applications. In Wagner, G.,
Werner, F., and Rango, F. D., editors, Proceedings
of the 13th International Conference on Simulation
and Modeling Methodologies, Technologies and Appli-
cations, SIMULTECH 2023, Rome, Italy, July 12-14,
2023, pages 417–424. SCITEPRESS.
Gaing, Z.-L. (2004). A particle swarm optimization approach
for optimum design of pid controller in avr system.
IEEE Transactions on Energy Conversion, 19(2):384–
391.
Gao, F. and Han, L. (2012). Implementing the Nelder-Mead
simplex algorithm with adaptive parameters. Computa-
tional Optimization and Applications, 51(1):259–277.
Garcia, C. E. and Morari, M. (1982). Internal model control.
a unifying review and some new results. Industrial &
Engineering Chemistry Process Design and Develop-
ment, 21(2):308–323.
Goodfellow, I., Bengio, Y., and Courville, A. (2016). Deep
Learning. MIT Press.
Haarnoja, T., Zhou, A., Abbeel, P., and Levine, S. (2018).
Soft Actor-Critic: Off-Policy Maximum Entropy Deep
Reinforcement Learning with a Stochastic Actor. Tech-
nical report. arXiv:1801.01290 [cs, stat] type: article.
Haarnoja, T., Zhou, A., Hartikainen, K., Tucker, G., Ha,
S., Tan, J., Kumar, V., Zhu, H., Gupta, A., Abbeel, P.,
and Levine, S. (2019). Soft actor-critic algorithms and
applications. (arXiv:1812.05905). arXiv:1812.05905
[cs, stat].
Hazan, E., Lee, H., Singh, K., Zhang, C., and Zhang, Y.
(2018). Spectral Filtering for General Linear Dynami-
cal Systems. In Proceedings of the 32nd International
Conference on Neural Information Processing Systems,
NIPS’18, pages 4639–4648, Red Hook, NY, USA. Cur-
ran Associates Inc.
Kingma, D. P. and Ba, J. (2017). Adam: A method for
stochastic optimization.
MacQueen, J. (1965). Some methods for classification and
analysis of multivariate observations. Proceedings of
the Fifth Berkeley Symposium on Mathematical Statis-
tics and Probability (June 21-July 18, 1965 and Decem-
ber 27, 1965-January 7, 1966), pages pages 281–297.
Referenced by: MathSciNet [MR0214227].
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A.,
Antonoglou, I., Wierstra, D., and Riedmiller, M. A.
(2013). Playing atari with deep reinforcement learning.
CoRR, abs/1312.5602.
Mok, R. and Ahmad, M. A. (2022). Fast and optimal tuning
of fractional order pid controller for avr system based
on memorizable-smoothed functional algorithm. En-
gineering Science and Technology, an International
Journal.
Neumann-Brosig, M., Marco, A., Schwarzmann, D., and
Trimpe, S. (2020). Data-efficient autotuning with
bayesian optimization: An industrial control study.
IEEE Transactions on Control Systems Technology,
28(3):730–740.
Rasmussen, C. E. and Williams, C. K. I. (2005). Gaussian
Processes for Machine Learning. The MIT Press.
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
440
Recht, B. (2018). A tour of reinforcement learning: The
view from continuous control. (arXiv:1806.09460).
arXiv:1806.09460 [cs, math, stat].
Solinas, F. M., Macii, A., Patti, E., and Bottaccioli, L.
(2024). An online reinforcement learning approach
for HVAC control. Expert Systems with Applications,
238:121749.
Stenger, D. and Abel, D. (2022). Benchmark of bayesian op-
timization and metaheuristics for control engineering
tuning problems with crash constraints.
Sutton, R. S. and Barto, A. G. (2020). Reinforcement Learn-
ing: An Introduction. Adaptive Computation and Ma-
chine Learning Series. The MIT Press, second edition
edition.
The MathWorks Inc. (2024). Matlab version: 23.2.0
(r2023b).
Yu, Z., Yang, X., Gao, F., Huang, J., Tu, R., and Cui, J.
(2020). A Knowledge-based reinforcement learning
control approach using deep Q network for cooling
tower in HVAC systems. In 2020 Chinese Automation
Congress (CAC), pages 1721–1726.
Zhang, H., Xu, W., and Yu, H. (2023). Policy expansion
for bridging offline-to-online reinforcement learning.
(arXiv:2302.00935). arXiv:2302.00935 [cs].
Zhang, X., Xie, Y., Han, J., and Wang, Y. (2022). Design of
control valve with low energy consumption based on
isight platform. Energy, 239:122328.
Zhuang, D., Gan, V. J. L., Duygu Tekler, Z., Chong, A., Tian,
S., and Shi, X. (2023). Data-driven predictive control
for smart HVAC system in IoT-integrated buildings
with time-series forecasting and reinforcement learn-
ing. 2023, 338:120936.
Ziegler, J. G. and Nichols, N. B. (1993). Optimum Settings
for Automatic Controllers. Journal of Dynamic Sys-
tems, Measurement, and Control, 115(2B):220–222.
˚
Astr
¨
om, K. and H
¨
agglund, T. (2004). Revisiting the
ziegler–nichols step response method for pid control.
Journal of Process Control, 14(6):635–650.
APPENDIX
SAC Hyperparameters
Table 1 lists the hyperparameter configuration used
for training the Soft-Actor critic agent mentioned in
Section 4.3.
Actor-Critic Networks
Figure 10 shows the neural-network architectures used
for the actor and the critic networks. The observation
input to the critic network (Figure 10a) is 15 dimen-
sional since the set of observations at a given time-step
consists of 3 scalars, and we feed the last 4 obser-
vations along with the current time-step to both the
networks. In the actor net (Figure 10b) tanh layer is
used to allow the mean action to be in
[−1, 1]
to allow
full range modification of the base PI flow controller’s
signal, while a softplus layer is used to ensure pos-
itive values for the standard deviation of the action
distribution.
Action Observation
QValue
Concat
Dense
ReLU
Dense
ReLU
Dense
1 15
16
8
1
(a) Critic Network.
Observation
stddev_action
mean_action
Dense
ReLU
Dense
Softplus
15
15 15
1
Dense
Tanh
1
(b) Actor Network.
Figure 10: SAC actor and critic neural network architectures.
Bayesian Optimization, Clustering and
Autoencoder Training
The optimized weights for different setpoint profiles
are shown in Table 2.
Autoencoder Networks
The autoencoder consists of an encoder network and
a decoder network. For both networks we choose
simple one layer neural networks. The encoder has the
Table 1: SAC hyperparameter configuration.
Parameter Value
Optimizer
Adam (Kingma and
Ba, 2017)
Learning rate 0.001
Discount factor (γ) 0.99
Minibatch size 256
Entropy target −1(−dim(A))
Target smoothing coeff. (
τ
)
0.001
Target update frequency 1
Policy update frequency 1
Gradient steps 1
Replay buffer size 10
5
Number of warm start steps
1810
Episode length 1800
Number of episodes 126
Simulation time step 0.1 sec
(λ
1
, λ
2
, λ
3
, λ
4
) 10
−2
·(6, 1.6, 1, 0.1)
Integrated Data-Driven Framework for Automatic Controller Tuning with Setpoint Stabilization Through Reinforcement Learning
441

Table 2: Optimized weights for different setpoint profiles.
Weight
Heuristic Set-
point Profile
Clustered
Setpoint
Profile
Weight 1 1.11777344 1.20485840
Weight 2 2.24179687 2.09331055
Weight 3 704.68750 1082.29980
Weight 4 3036.91406 2000.00000
Table 3: Autoencoder training hyperparameters.
Parameter Value
Optimizer Adam
Learning Rate 10
−4
β
1
0.9
β
2
0.999
Batch size 64
Epochs 3000
Loss Function Mean Squared Error
following structure
1. Fully Connected Layer (1000 → 4)
2. ReLU
And the decoder has a similar architecture
1. Fully Connected Layer (4 → 1000)
2. Sigmoid
The hyperparameters used for training are listed in
Table 3.
Clustering
See Figure 11a and Figure 11b.
(a) (b)
Figure 11: (a) Validation losses of last epoch for different
latent dimensions. (b) Training and validation losses over
epochs.
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
442
