
Membership Inference Attacks Against Indoor Location Models
Vahideh Moghtadaiee
1
, Amir Fathalizadeh
1
and Mina Alishahi
2
1
Cyberspace Research Institute, Shahid Beheshti University, Tehran, Iran
2
Department of Computer Science, Open Universiteit, Amsterdam, The Netherlands
Keywords:
Membership Inference Attack, Indoor Localization, Differential Privacy, Location Privacy.
Abstract:
With the widespread adoption of location-based services and the increasing demand for indoor positioning
systems, the need to protect indoor location privacy has become crucial. One metric used to assess a dataset’s
resistance against leaking individuals’ information is the Membership Inference Attack (MIA). In this paper,
we provide a comprehensive examination of MIA on indoor location privacy, evaluating their effectiveness in
extracting sensitive information about individuals’ locations. We investigate the vulnerability of indoor location
datasets under white-box and black-box attack settings. Additionally, we analyze MIA results after employing
Differential Privacy (DP) to privatize the original indoor location training data. Our findings demonstrate
that DP can act as a defense mechanism, especially against black-box MIA, reducing the efficiency of MIA
on indoor location models. We conduct extensive experimental tests on three real-world indoor localization
datasets to assess MIA in terms of the model architecture, the nature of the data, and the specific characteristics
of the training datasets.
1 INTRODUCTION
Privacy in indoor localization is a major concern as
it involves tracking people within indoor spaces, po-
tentially revealing their social habits, interests, work-
places, and health status (Alhalafi and Veeraraghavan,
2019; Fathalizadeh et al., 2023). Unlike GPS-based
outdoor localization, indoor positioning systems using
Wi-Fi, Bluetooth, etc. lack robust privacy safeguards,
raising concerns about unauthorized access, tracking
without consent, targeted advertising, and malicious
activities (Sartayeva and Chan, 2023; Fathalizadeh
et al., 2024). Accumulating location data reveals be-
havior patterns, emphasizing the need for privacy mea-
sures in ethical deployment (Navidan et al., 2022).
One prominent privacy attack is the membership
inference attack (MIA), where adversaries try to de-
termine if a specific record was part of the training
data for a machine learning (ML) model trained on
sensitive information, such as indoor location data.
MIA exploits information leakage to identify whether
a data point was included in the training set, raising pri-
vacy concerns for sensitive applications (Shokri et al.,
2017). In cases involving sensitive data like medical
records, financial data, or location information, the
consequences of an MIA breach can be severe (Diony-
siou and Athanasopoulos, 2023). Privacy-preserving
techniques like differential privacy (DP), anonymiza-
tion, and generative models aim to protect data privacy
from attackers. However, studies show that these tech-
niques can still be vulnerable to MIA, posing risks to
the confidentiality of the training data (Hyeong et al.,
2022). Among these methods, DP is widely used, offer-
ing probabilistic protection during ML model training.
Models trained with DP do not retain specific records,
potentially shielding against MIA. This underscores
the importance of DP in mitigating privacy risks.
In localization context, MIA can reveal if specific
locations or individuals were part of a model’s train-
ing data, risking unauthorized tracking and privacy
breaches (Zhang et al., 2020). Indoor datasets, un-
like outdoor ones, have higher spatial granularity and
distinct patterns due to confined spaces and a higher
density of Access Points (APs) (number of features),
necessitating careful MIA assessment. These differ-
ences drive our investigation into MIA vulnerabilities
in indoor localization models. This paper presents the
first evaluation of MIA on indoor localization systems,
including assessments after privatizing the training
dataset with DP. We also examine two possible MIA
attack models before and after privatizing indoor loca-
tion data: i) white-box, where the adversary knows the
target model and parameters, and ii) black-box, where
the adversary lacks such knowledge. The study evalu-
584
Moghtadaiee, V., Fathalizadeh, A. and Alishahi, M.
Membership Inference Attacks Against Indoor Location Models.
DOI: 10.5220/0012863100003767
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 21st International Conference on Security and Cryptography (SECRYPT 2024), pages 584-591
ISBN: 978-989-758-709-2; ISSN: 2184-7711
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

ates MIA performance and potential privacy leakage
using three real-world indoor location datasets.
The paper is structured as follows: Section 2 re-
views related work, Section 3 covers preliminary con-
cepts, and Section 4 introduces the MIA architecture
in indoor localization and adversary methodology. The
experimental setup and evaluation are in Section 5, and
Section 6 concludes the paper.
2 RELATED WORK
The first MIA against classification models under ML-
as-a-service (MLaaS) is introduced by (Shokri et al.,
2017). They measure leaked membership information
and propose a shadow training technique to perform
membership inference based solely on the model’s
outputs. However, their approach is limited by the
assumption that the target and shadow models have
consistent structures and training data. Subsequent
studies (Salem et al., 2018) and (Carlini et al., 2022),
extend MIA techniques. Authors in (Salem et al.,
2018) relax adversarial assumptions and evaluate mem-
bership privacy, proposing defenses like dropout and
model stacking. A recent survey provides an overview
of MIA literature on both attacks and defenses (Hu
et al., 2022). DP counters MIA by adding noise to
the objective function or gradients during training.
Authors in (Hyeong et al., 2022) assess tabular data
synthesis models’ vulnerability to MIA and the effec-
tiveness of DP-SGD and DP-GAN in mitigating it.
However, current defenses often affect outputs rather
than preserving the privacy of source data (Yang et al.,
2023).
Regarding MIA on location data models, authors
in (Shokri et al., 2017; Salem et al., 2018; Rahimian
et al., 2020; Hui et al., 2021; Choquette-Choo et al.,
2021; Liu et al., 2022) employ MIA methodologies
to evaluate location data models Specifically, (Zhang
et al., 2020) advances this problem by exploring more
realistic attack scenarios. However, these studies fo-
cus on outdoor location ML models. While progress
has been made in membership inference for location-
based data, a notable gap exists in addressing MIA
for indoor location data. Previous studies have not
explored MIA against ML models trained on indoor
location datasets, despite the unique challenges posed
by indoor datasets, including higher spatial granularity,
distinct signal patterns, and increased AP density. Ad-
ditionally, while (Fathalizadeh et al., 2023) discusses
the impact of DP on indoor localization accuracy, the
application of DP to the original location dataset be-
fore model training and subsequent evaluation of MIA
efficiency on this model remain unexplored.
3 PRELIMINARIES
3.1 Indoor Localization
Location fingerprinting draws inspiration from the
unique fingerprints of individuals, with each loca-
tion exhibiting distinct signal characteristics, often
manifested as Received Signal Strength (RSS) values
from Wi-Fi signals, commonly used in indoor localiza-
tion (Hayward et al., 2022). The process involves two
main stages: tra9ning and localization, both relying on
Wi-Fi APs as signal references. During training, data
collected through surveying the indoor area is used
to create a radiomap containing RSS measurements
or other features from known Reference Points (RPs),
with their associated
(x, y)
coordinates or zone number
z
stored in a dataset called a radiomap on the server.
Additionally, data collection can also be conducted
through extensive data collection from individuals in
the targeted area via crowdsourcing (Alikhani et al.,
2018). In the localization stage, systems analyze sig-
nals from APs to predict user location, employing
techniques such as traditional ML algorithms, Deep
Learning (DL), and deep reinforcement learning (Roy
and Chowdhury, 2021).
3.2 Differential Privacy
Differential privacy (DP) is designed for scenarios
with a trusted data curator who collects data from
individuals, processes it to satisfy DP constraints, and
releases results (Dwork et al., 2006). DP limits the
impact of a single data point on the overall output.
Definition 1 (
(ε, δ)
-Differential Privacy (Dwork et al.,
2006)). An algorithm
M
satisfies
(ε, δ)
-differential
privacy (
(ε, δ)
-DP), where
ε > 0
,
δ ≥ 0
, if and only if
for any two neighboring datasets D and D
′
:
∀T ⊆ Range(M ) : Pr[M (D) ∈ T ] ≤ e
ε
Pr[M (D
′
) ∈ T ] + δ,
where
Range(M )
denotes the set of all possible out-
puts of the algorithm
M
. Two datasets
D
and
D
′
are
considered neighbors (
D ∼ D
′
), if either
D = D
′
+ r
or
D
′
= D + r
, where
D + r
represents the dataset ob-
tained by adding the record r to dataset D.
PrivSyn (Zhang et al., 2021) is a DP algorithm for
synthesizing tabular microdata for data analysis. It gen-
erates a synthetic dataset
D
2
from an original dataset
D
1
, ensuring statistical similarity between them. For-
mally,
D
consists of
n
records with
k
attributes.
D
2
is considered similar to
D
1
if
f (D
2
)
closely approx-
imates
f (D
1
)
for any function
f
. PrivSyn focuses
on three statistical measures: marginal queries, range
queries, and classification models. Marginal queries
Membership Inference Attacks Against Indoor Location Models
585
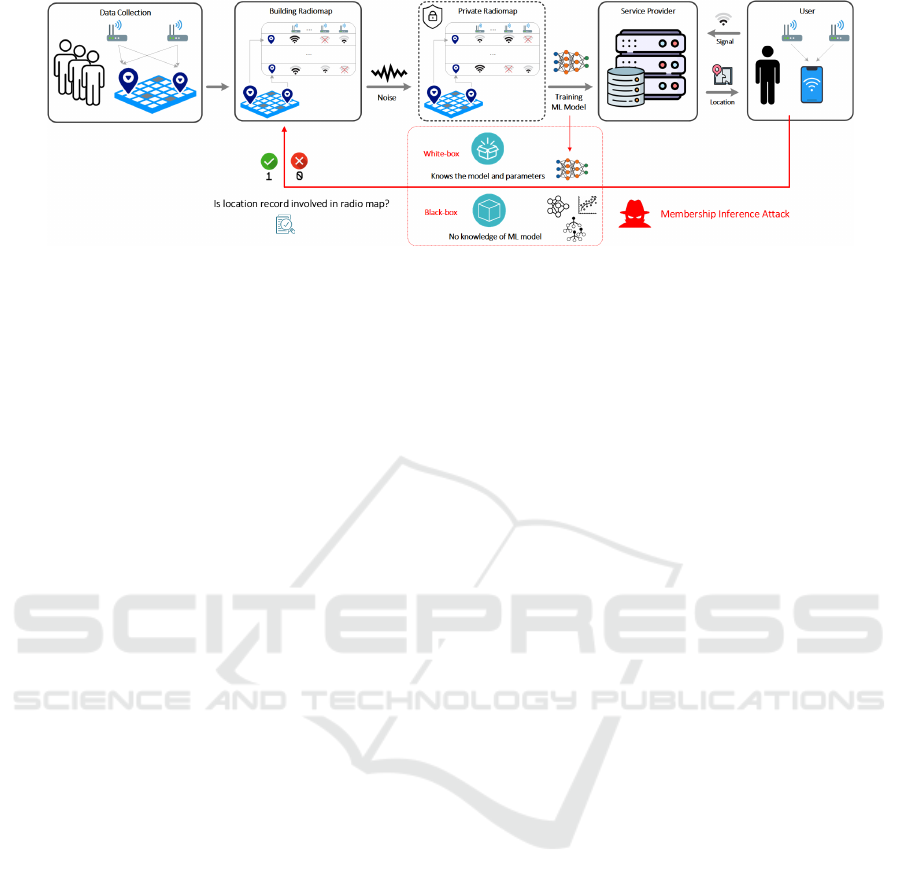
Figure 1: MIA architecture against differentially private indoor location models.
capture joint attribute distributions, range queries
count records falling within specified ranges, and clas-
sification models are trained and evaluated using the
synthetic dataset.
3.3
Membership Inference Attack (MIA)
MIA aims to detect if a data point is part of a target
model’s training dataset, risking privacy by potentially
exposing raw data and model details (Hyeong et al.,
2022). It uses methods like analyzing model confi-
dence scores, probing decision boundaries, and ex-
ploiting vulnerabilities. Attackers balance efficiency
and detectability when choosing techniques. MIA’s
significance lies in its potential to breach privacy as
ML models increasingly handle sensitive data, with its
easy deployment amplifying its importance. Given a
target data point
x
T
, a target ML model
M
trained on
the original dataset
D
, and adversary prior knowledge
denoted as
I
, MIA relies on training a binary classifier
to understand an individual’s membership status as a
member or non-member.
4 MIA AGAINST INDOOR
LOCATION MODEL
4.1 Problem Formulation
This paper focuses on indoor localization as an ML
classification problem, aiming to determine the spe-
cific zone within a building where a user is located.
Each zone (
z
) represents a distinct label in the classifi-
cation task, typically corresponding to different rooms,
corridors, or hallways. For instance, zones could be
labeled as ’Room A’, ’Room B’, ’Corridor 1’, ’Corri-
dor 2’, etc. The task involves training a classification
model to predict the zone accurately based on RSS
values or other features collected from APs deployed
indoors. In indoor positioning, a classifier, denoted
as model
M
, takes an input
X
, e.g., a vector of RSS
values (as features), and estimates an output vector as
M (X) = Y
. The length of
Y
corresponds to the num-
ber of class labels (zones), and each element represents
the probability of each zone. The attack model
A
is
constructed based on the top posterior probabilities,
Pr(Y |X)
, sorted in descending order. If the highest
probability surpasses a predefined threshold, the loca-
tion is categorized as a member of the training process;
otherwise, it is classified as a non-member (Rahimian
et al., 2020) as below:
A =
1 max Pr(Y|X) ≥ threshold
0 otherwise
(1)
4.2 Attack Methodology
The architecture of MIA targeting the model trained
on indoor location datasets is illustrated in Fig.1. As
observed, the location data collected from individuals
is used to construct a radiomap for indoor location in-
ference. To enhance privacy, noise is injected into this
radiomap, ensuring DP while maintaining accuracy.
Next, the differentially private radiomap serves as the
training dataset for the indoor location model, stored
by the service provider. Users query the provider for
their locations, with the trained model using the ra-
diomap to predict based on their RSS values. How-
ever, attackers may also attempt MIA by querying the
service provider. Attack model
A
aims to determine if
a user or location was part of the training process. In
white-box settings, attackers with model knowledge
use sophisticated strategies, while black-box settings
require alternative inference methods due to limited
information.
To implement the attack, the adversary trains a
shadow model to mimic the target model’s behavior,
using it to gather ground truth location data for training
model
A
. This requires a dataset,
D
s
, from the same
distribution as the target model’s training data, which
can be obtained by querying the server with sample
RSS inputs. The shadow model construction varies by
attack type: in a white-box setting, the adversary has
SECRYPT 2024 - 21st International Conference on Security and Cryptography
586

access to the model’s parameters and internal struc-
ture, while in a black-box setting, only the model’s
outputs are accessible. Both settings are common in
practice (Song et al., 2023) and are detailed in the
following subsections.
4.3 White-Box Setting
In the white-box attack model, the adversary is aware
of the target model and its associated hyperparameters,
relying on this transparency for informed inference.
The attacker’s objective in the white-box setting is
expressed as follows:
Given M (·), D, I determine if M (x
T
) reveals x
T
∈ D
(2)
To conduct the white-box attack, we follow the proce-
dure described in (Salem et al., 2018). The adversary is
assumed to have a shadow dataset
D
s
, which is divided
into a shadow training dataset
D
t
s
and an output shadow
dataset
D
o
s
. The attacker uses
D
t
s
to train the shadow
model
S
and then employs
S
to make predictions on
D
s
(comprising
D
t
s
and
D
o
s
), obtaining posterior prob-
abilities for each data point. For each data point, the
highest posterior probabilities form its feature vector.
A feature vector is labeled as
1
(member) if its cor-
responding data point is in
D
t
s
, and
0
(non-member)
otherwise. These feature vectors and labels are then
used to train the attack model
A
. To determine if a tar-
get
x
T
is in the training dataset, the adversary queries
M
with
x
T
to obtain its posterior probabilities, selects
the maximum probabilities (sorted highest to lowest)
and inputs them into A for membership prediction.
4.4 Black-Box Setting
The black-box attack model is more challenging, as
attackers lack explicit knowledge of the target model.
The attacker’s objective in the black-box setting is:
Given M (x
T
), determine if x
T
∈ D. (3)
To implement the black-box attack, we use a col-
lection of classifiers as shadow models to attack the
target model, enhancing the attack by combining mul-
tiple ML models, each using a different classification
algorithm, as described in (Salem et al., 2018). These
models form a comprehensive shadow model, with
each sub-shadow model trained on the same data. The
features from all sub-shadow models are combined to
create a larger dataset for training the attack model
A
. This approach helps the shadow model understand
various classifiers’ behaviors, facilitating an attack on
an unknown target model, assuming one sub-shadow
model matches the target model’s classifier.
5 EXPERIMENTS AND RESULTS
5.1 Datasets Description
CRI: The experimental dataset is a
51m ×18m
testbed
on the second floor of the Cyberspace Research Insti-
tute at Shahid Beheshti University, containing
9
APs
and
384
RPs. RSS values from all APs are measured
at RPs in four directions, with
100
samples per direc-
tion, and stored in the radiomap. Further details are
available in (Moghtadaiee et al., 2019).
JUIndoorLoc: The database covers a building with
five floors situated at Jadavpur University (Roy et al.,
2019). Each floor spans an area of
882m
2
, and the
entire space is subdivided into grids measuring
1m
2
.
Our focus is the fourth floor, and we consider
24
APs
and 645 RPs within this floor.
UJIndoorLoc: This is an indoor location dataset in-
cluding multiple buildings and stories of Universitat
Jaume I, utilizing Wi-Fi fingerprints. Details regarding
this dataset can be found in (Torres-Sospedra et al.,
2014). We select a diverse area on the first floor of
building No.
1
, comprising a total of
198
RPs out of
5249
RPs across the entire building complex. Within
the chosen area,
41
APs are detected in various loca-
tions, with 18 APs consistently sensed at all RPs.
5.2 Evaluation Metrics
We evaluate membership inference using precision,
recall, and attack accuracy, adhering to the metrics
outlined in (Zhang et al., 2020). In these metrics, True
Positive (
T P
) represents correctly predicted ‘mem-
ber’ instances, while True Negative (
T N
) denotes cor-
rectly predicted ‘non-member’ instances. False Posi-
tive (
FP
) indicates ‘non-member’ instances incorrectly
classified as ‘member’, and False Negative (
FN
) rep-
resents ‘member’ instances incorrectly classified as
‘non-member’.
Precision: Precision is the fraction of the specific data
points predicted as members of the datasets used for
training the ML model. It is calculated as follows:
Precision =
T P
T P + FP
(4)
Recall: Recall represents the fraction of the specific
data points that can be correctly inferred as members,
which measures the coverage of our attack. It is calcu-
lated as follows:
Recall =
T P
T P + FN
(5)
Attack Accuracy: It can be used as the privacy metric
to evaluate the privacy-preserving performance. The
Membership Inference Attacks Against Indoor Location Models
587

Figure 2: Comparision of White-box MIA’s performance for
each dataset.
higher the attack accuracy, the more serious the privacy
leak and the more successful the attack is. The attack
accuracy is calculated as follows:
AttackAccuracy =
T P + T N
T P + T N + FP + FN
(6)
5.3 Experimental Results
We evaluate MIA’s privacy impact on indoor location
datasets from various angles. Effectiveness varies with
model architecture, data traits, and training dataset
attributes, including pre-training DP application. Our
simulation follows the original code configuration in
(Salem et al., 2018)
1
and (Shokri et al., 2017)
2
.
5.3.1 Overall MIA Performance in White-Box
In the white-box scenario, where the adversary knows
the model used to train the dataset, we employ a mul-
tilayer perceptron (MLP) as the foundational training
model, assuming the adversary is aware of this choice.
The MLP used as the target model has a single hidden
layer with 128 units. Each shadow model replicates
the architecture of its corresponding target model. Ad-
ditionally, we construct the attack model using another
MLP model with a hidden layer containing
64
units
and a softmax output layer. The outcomes of this ex-
periment are illustrated in Fig. 2. Results indicate that
MIA has a 74% success across all datasets.
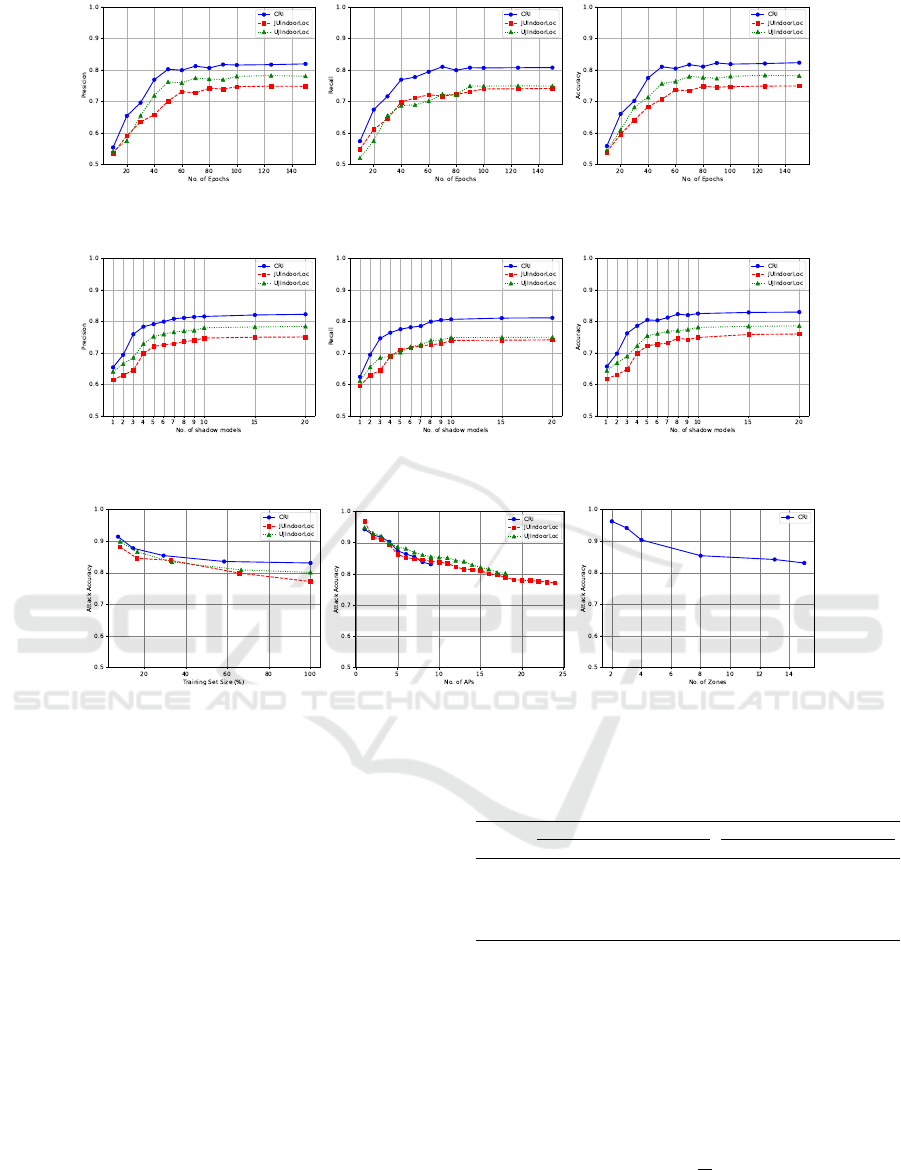
5.3.2 Impact of Epochs and Shadow Models
Number in White-Box Setting
To examine the effects of epoch number and shadow
model size, we varied number of epochs from
10
to
150
and shadow models from
1
to
20
. Fig. 3 and 4
present precision, recall, and attack accuracy metrics
across three datasets. To isolate individual variables’
effects, we fix shadow models at
10
in Fig. 3 and
1
https://github.com/AhmedSalem2/ML-Leaks
2
https://github.com/csong27/membership-inference
epochs at
100
in Fig. 4. Both variables show similar
trends, with increasing epochs and shadow models
enhancing MIA success up to a threshold (identified
as
80
epochs and
10
shadow models), beyond which
further increments yield marginal improvements.
5.3.3 The Impact of Dataset Properties on MIA
Performance in White-Box Setting
Our objective here is to assess how adjustments to
input dataset parameters, such as dataset size, number
of zones (class labels), and number of APs (features),
affect MIA accuracy.
Dataset Size: Fig. 5a depicts dataset size impact
on MIA accuracy as the percentile fraction changes.
The numbers of APs and zones are kept at their maxi-
mum values in the original dataset. Remarkably, larger
datasets diminish MIA effectiveness across all datasets.
This is due to the increased difficulty in identifying
specific records from a larger pool.
Number of APs: Fig. 5b shows how varying the
number of APs (features) impacts attack accuracy
across datasets. An increased number of features leads
to reduced accuracy. This is because fewer features cre-
ate a more concentrated set of characteristics that the
model relies on, potentially aiding attackers in identify-
ing specific data points indicating higher vulnerability
to MIA.
Number of Zones: Fig. 5c illustrates how the
number of zones affects MIA accuracy for the CRI
dataset. Increasing zone count leads to MIA accuracy
decline, as the model captures more nuanced indoor
environment patterns. Higher zone numbers introduce
complexity and diversity, making it harder for attackers
to infer membership status accurately.
These findings underscore the critical impact of
variables such as the number of users, features, and
zones on the success of MIA attacks. While increas-
ing these variables may diminish MIA effectiveness, it
concurrently enhances precise localization, thereby im-
proving location-based services. Essentially, involving
more users and increasing the number of APs benefits
both localization accuracy and privacy protection. The
comparison across three datasets indicates that higher
numbers of users and APs lead to less successful MIA,
consistent with the trends observed in Fig. 5.
5.3.4
The Impact of Classifiers in White-Box and
Black-Box Settings
In this section, we explore the impact of classifier
models on MIA outcomes in both white and black-box
settings. Six common classification algorithms, MLP,
Linear Regression (LR), Decision Tree (DT), Random
Forest (RF), Support Vector Machine (SVM), and K-
SECRYPT 2024 - 21st International Conference on Security and Cryptography
588
(a) Precision. (b) Recall. (c) Attack accuracy.
Figure 3: MIA performance for several numbers of epochs during training in white-box setting (10 shadow models).
(a) Precision. (b) Recall. (c) Attack accuracy.
Figure 4: MIA performance for various numbers of shadow training when in white-box setting (100 epochs).
(a) Different training sizes. (b) Different no. of APs. (c) Different no. of zones.
Figure 5: MIA accuracy when dataset size, number of features, and number of zones vary in white-box setting.
Nearest Neighbors (KNN), are used. Fig. 6 presents
heatmaps illustrating MIA performance in terms of
precision, recall, and accuracy for the CRI dataset.
Each cell
(i, j)
represents MIA performance when the
i
th classifier serves as the target model (trained model)
and the
j
th classifier serves as the attack model (em-
ployed by the attacker). Only diagonal cells repre-
sent MIA performance in white-box settings, where
the attacker knows the model. Darker colors indi-
cate higher MIA success. Across all classifiers, the
attacker demonstrates a notable ability to identify train-
ing dataset records, with increased likelihood when
utilizing MLP as either the target or attack model.
To delve deeper into classifier resilience against
MIA in different settings, we conducted further exper-
iments. In the black-box scenario, a combination of
MLP, RF, and LR was used as sub-shadow models,
with MLP as the target model. Conversely, the same
classifier was employed in the white-box scenario. Re-
sults in Table 1 show that even in the black-box setting,
the attacker achieves a success rate comparable to the
Table 1: Comparing the MIA performance in white and black
box settings for CRI dataset.
Classifier
White Box Black Box
Precision Recall Attack Accuracy Precision Recall Attack Accuracy
MLP 0.81 0.80 0.83 0.83 0.79 0.84
LR 0.74 0.73 0.76 0.71 0.72 0.72
DT 0.72 0.71 0.75 0.76 0.74 0.79
RF 0.78 0.78 0.80 0.81 0.82 0.85
SVM 0.77 0.76 0.78 0.81 0.80 0.80
KNN 0.69 0.69 0.71 0.66 0.64 0.65
white-box scenario. This highlights the vital need for
robust privacy-enhancing technologies to protect indi-
vidual information.
5.3.5 Defense with Differential Privacy
In this section, we use DP to defend against MIA and
evaluate its effectiveness on an original indoor loca-
tion dataset. We employ PrivSyn algorithm to generate
(ε, δ)
-DP datasets, with
δ =
1
n
2
, where
n
is the number
of data points. We adopt
ε = 1, 5, 10
to examine the
privacy budget’s impact. We aim to assess the sus-
ceptibility of the original dataset and the differentially
Membership Inference Attacks Against Indoor Location Models
589
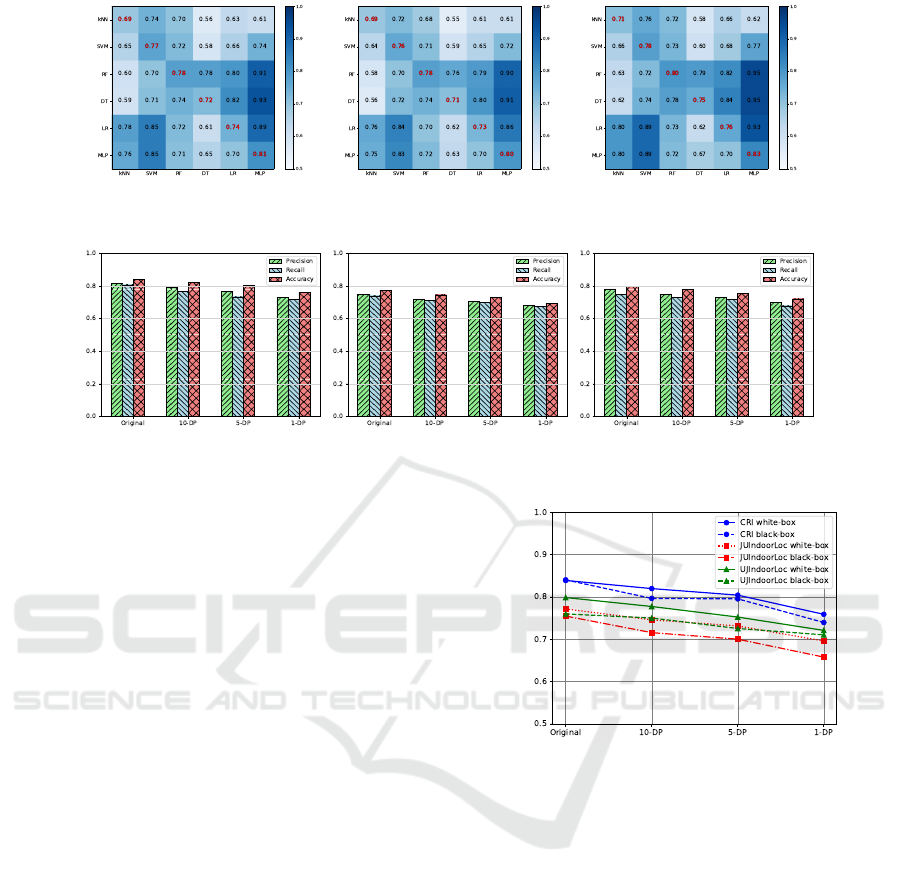
(a) Precision. (b) Recall. (c) Attack accuracy.
Figure 6: Heatmaps of MIA performance for the target model (rows) vs attack model (columns) for CRI dataset.
(a) CRI. (b) JUIndoorLoc. (c) UJIndoorLoc.
Figure 7: MIA performance in white-box setting before and after deploying DP.
private one to MIA and measure membership infor-
mation disclosure pre- and post-DP application. This
analysis shows DP’s effectiveness in mitigating MIA
risks and offers insights into its efficacy as a defense
against privacy breaches in indoor location datasets.
Fig. 7 summarizes the white-box attack evalua-
tion pre- and post-applying DP on original datasets.
Initially, the attack achieves the highest success us-
ing original datasets for training. However, with the
DP application, attack success diminishes, varying
with the privacy budget. Lower budgets or increased
noise lead to reduced success. Fig. 8 also compares
white-box and black-box attacks before and after DP
implementation on original datasets. Similar to white-
box findings, the highest MIA success occurs with
original data. However, applying DP notably reduces
attack effectiveness, aligning with the chosen DP pri-
vacy budget. Results highlight DP’s efficacy in miti-
gating black-box attack risks compared to white-box,
strengthening the trained model privacy. These find-
ings show that lower privacy budgets offer increased
protection, emphasizing DP’s importance in defending
against MIA in indoor location models.
6 CONCLUSION
This study delves into protecting indoor location pri-
vacy amid the increasing use of location-based ser-
vices. We assess how Membership Inference Attacks
(MIA) extract sensitive indoor movement data from
datasets and explore the effectiveness of Differential
Figure 8: Comparison of MIA accuracy in white-box and
black-box settings on original and DP datasets.
Privacy (DP) in mitigating these risks. Through real-
world experiments, we identify vulnerabilities to MIA
and analyze parameter impacts on accuracy.
REFERENCES
Alhalafi, N. and Veeraraghavan, P. (2019). Privacy and se-
curity challenges and solutions in IOT: A review. IOP
Conference Series: Earth and Environmental Science,
322:012013.
Alikhani, N., Moghtadaiee, V., Sazdar, A. M., and Ghorashi,
S. A. (2018). A privacy preserving method for crowd-
sourcing in indoor fingerprinting localization. In 8th
International Conference on Computer and Knowledge
Engineering (ICCKE), pages 58–62.
Carlini, N., Chien, S., Nasr, M., Song, S., Terzis, A., and
Tramer, F. (2022). Membership inference attacks from
first principles. In IEEE Symposium on Security and
Privacy, pages 1897–1914.
SECRYPT 2024 - 21st International Conference on Security and Cryptography
590

Choquette-Choo, C. A., Tramer, F., Carlini, N., and Papernot,
N. (2021). Label-only membership inference attacks.
In International conference on machine learning, pages
1964–1974.
Dionysiou, A. and Athanasopoulos, E. (2023). Sok: Member-
ship inference is harder than previously thought. Pro-
ceedings on Privacy Enhancing Technologies, 3:286–
306.
Dwork, C., McSherry, F., Nissim, K., and Smith, A. (2006).
Calibrating noise to sensitivity in private data analysis.
In Proceedings of the Third Conference on Theory of
Cryptography, page 265–284.
Fathalizadeh, A., Moghtadaiee, V., and Alishahi, M. (2023).
Indoor geo-indistinguishability: Adopting differential
privacy for indoor location data protection. IEEE Trans-
actions on Emerging Topics in Computing, pages 1–13.
Fathalizadeh, A., Moghtadaiee, V., and Alishahi, M. (2024).
Indoor location fingerprinting privacy: A comprehen-
sive survey. arXiv:2404.07345.
Hayward, S., van Lopik, K., Hinde, C., and West, A.
(2022). A survey of indoor location technologies, tech-
niques and applications in industry. Internet of Things,
20:100608.
Hu, H., Salcic, Z., Sun, L., Dobbie, G., Yu, P. S., and Zhang,
X. (2022). Membership inference attacks on machine
learning: A survey. ACM Computing Surveys (CSUR),
54(11s):1–37.
Hui, B., Yang, Y., Yuan, H., Burlina, P., Gong, N. Z., and
Cao, Y. (2021). Practical blind membership inference
attack via differential comparisons. arXiv:2101.01341.
Hyeong, J., Kim, J., Park, N., and Jajodia, S. (2022). An
empirical study on the membership inference attack
against tabular data synthesis models. In Proceedings
of the 31st ACM International Conference on Informa-
tion & Knowledge Management, page 4064–4068.
Liu, Y., Zhao, Z., Backes, M., and Zhang, Y. (2022). Mem-
bership inference attacks by exploiting loss trajectory.
In Proceedings of the 2022 ACM SIGSAC Conference
on Computer and Communications Security, pages
2085–2098.
Moghtadaiee, V., Ghorashi, S. A., and Ghavami, M. (2019).
New reconstructed database for cost reduction in
indoor fingerprinting localization. IEEE Access,
7:104462–104477.
Navidan, H., Moghtadaiee, V., Nazaran, N., and Alishahi, M.
(2022). Hide me behind the noise: Local differential
privacy for indoor location privacy. In IEEE European
Symposium on Security and Privacy Workshops, pages
514–523.
Rahimian, S., Orekondy, T., and Fritz, M. (2020). Sam-
pling attacks: Amplification of membership infer-
ence attacks by repeated queries. arXiv preprint
arXiv:2009.00395.
Roy, P. and Chowdhury, C. (2021). A survey of machine
learning techniques for indoor localization and naviga-
tion systems. Journal of Intelligent
&
Robotic Systems,
101(3):1–34.
Roy, P., Chowdhury, C., Ghosh, D., and Bandyopadhyay,
S. (2019). Juindoorloc: A ubiquitous framework for
smartphone-based indoor localization subject to con-
text and device heterogeneity. Wirel. Pers. Commun.,
106(2):739–762.
Salem, A., Zhang, Y., Humbert, M., Fritz, M., and Backes,
M. (2018). Ml-leaks: Model and data independent
membership inference attacks and defenses on machine
learning models. ArXiv, abs/1806.01246.
Sartayeva, Y. and Chan, H. C. (2023). A survey on indoor po-
sitioning security and privacy. Computers & Security,
131:103293.
Shokri, R., Stronati, M., Song, C., and Shmatikov, V. (2017).
Membership inference attacks against machine learn-
ing models. In IEEE Symposium on Security and Pri-
vacy, pages 3–18.
Song, B., Deng, M., Pokhrel, S. R., Lan, Q., Doss, R. R. M.,
and Li, G. (2023). Digital privacy under attack: Chal-
lenges and enablers. ArXiv, abs/2302.09258.
Torres-Sospedra, J., Montoliu, R., Mart
´
ınez-Us
´
o, A., Avari-
ento, J. P., Arnau, T. J., Benedito-Bordonau, M., and
Huerta, J. (2014). Ujiindoorloc: A new multi-building
and multi-floor database for wlan fingerprint-based in-
door localization problems. In Conference on Indoor
Positioning and Indoor Navigation (IPIN), pages 261–
270.
Yang, R., Ma, J., Miao, Y., and Ma, X. (2023). Privacy-
preserving generative framework for images against
membership inference attacks. IET Communications,
17(1):45–62.
Zhang, G., Zhang, A., and Zhao, P. (2020). Locmia: Mem-
bership inference attacks against aggregated location
data. IEEE Internet of Things Journal, 7(12):11778–
11788.
Zhang, Z., Wang, T., Li, N., Honorio, J., Backes, M., He, S.,
Chen, J., and Zhang, Y. (2021). PrivSyn: Differentially
private data synthesis. In USENIX Security Symposium,
pages 929–946.
Membership Inference Attacks Against Indoor Location Models
591
