Combine Intent Recognition with Behavior Modeling in Teaching
Competition Military Simulation Platform
Yi Zhang, Shuilin Li, Chuan Ai, Yong Peng
and Kai Xu
College of Systems Engineering, National University of Defense Technology, Changsha 410073, China
Keywords: Simulation and Application, Evolution Behavior Tree, Symbolic Plan Recognition, Decision-Reasoning.
Abstract: Intent recognition refers to obtaining the observations of an agent and then using the observations to reason
its current state and to predict its future actions. Behavior modeling, describing the behavior or performance
of an agent, is an important research area in intent recognition. However, few studies have combined behavior
modeling with intent recognition to investigate its real-world applications. In this paper, we study behavior
modeling for intent recognition for cognitive intelligence, aiming to enhance the situational awareness
capability of AI and expand its applications in multiple fields. Taking the combat environment and tanks as
the research object, based on the behavior tree and SBR recognition algorithm, this paper designs the
framework and experiments for behavior modeling and intent recognition. Firstly, uses the evolution behavior
tree algorithm to autonomously generate the behavior model adapted to the environment. Secondly uses the
SBR algorithm to effectively recognize actions and plan paths of enemy tank to guide self-tank actions in the
TankSimV1.20 simulation platform. The results show that the tank survival rate increases by 80% under the
guidance of the intent recognition results, and the method in this paper can provide effective guidance for the
intent recognition behavior modeling, which has a broad application prospect.
1 INTRODUCTION
Intent recognition, the ability to recognize the
activities, plans and goals of other agents, enables the
observer to reason about the current state of the
recognized agent and predict its future action(Mirsky
et al., n.d.). In practical research, intent recognition
contains three types: goal recognition, plan
recognition, and activity recognition. Among these,
activity recognition is the least abstract level of
inference, goal recognition is the most abstract, and
plan recognition lies somewhere between them.
Behavior modeling, describing the behavior or
performance of an identified person, is an important
research area in intent recognition. Behavior
modeling is mainly divided into cognitive behavior
modeling and physical behavior modeling. Physical
behavior modeling refers to the direct physical
modeling of the external environment. Cognitive
behavior modeling refers to simulating the various
thinking processes of the recognized agent.
In military simulation, behavior trees are often
utilized to guide the Computer-Generated Forces
(CGFs) for simulating combat processes(Fu
Yanchang, 2019). While Behavior Trees can
effectively manage and organize a series of
predefined behavior patterns, the CGFs lack the
ability to flexibly respond and make independent
decisions based on actual situations(Jie Yang, 2021).
If the integration of intent recognition and behavior
trees can be achieved and applied in military
simulation, it would enable CGFs to possess more
O
O
D
A
Observation
Orientation
Decision
Action
SBR Algorithm EBT Models
Tank AgentTankSimV1.20
Red Tank SBR Algorithm Blue Tank EBT Models
Observation
Plan Library
Current State Qurey(CSQ)
Propagate Up
Reason Plan & Goal
?
ConMove
Move
ConAttack Attack
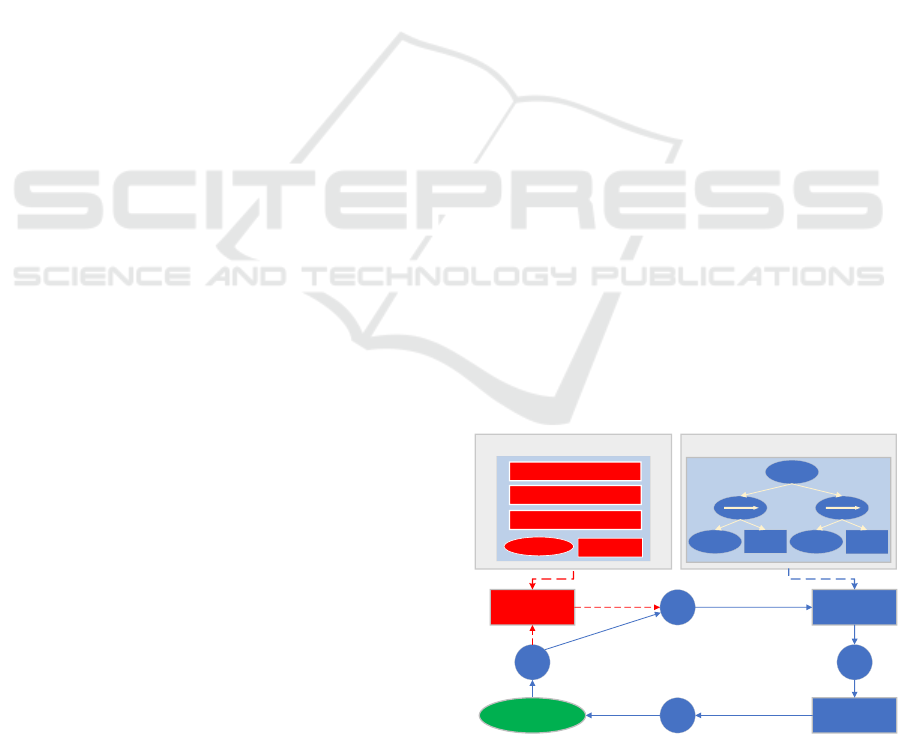
Figure 1: The framework of combine intent recognition
with behavior modeling in teaching competition military
simulation platform (TCMSP).
456
Zhang, Y., Li, S., Ai, C., Peng, Y. and Xu, K.
Combine Intent Recognition with Behavior Modeling in Teaching Competition Military Simulation Platform.
DOI: 10.5220/0012869400003758
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2024), pages 456-463
ISBN: 978-989-758-708-5; ISSN: 2184-2841
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

advanced decision-making capabilities, thereby
improving the realism and practicality of military
simulations. This work seeks to combine intent
recognition with behavior modeling in military
simulation platform, and thus allow a decision-
making agent.
Figure 1 shows the framework of this paper. The
circle consisting of four modules formulates a
cognition loop(Xu et al., 2019). Specifically, the
TankSim V1.20 firstly feed the observation into EBT
Models, which is a behavior model that we generate
using the Evolutionary Algorithm. The EBT models
guides blue tank actions, making them more closely
resemble real-world military forces(Jie Yang, 2021).
Then the blue tank makes real-time decisions. Finally,
the red tank makes decisions based on actions of blue
tank using the SBR algorithm(Avrahami-Zilberbrand
& Kaminka, 2005).
The rest of this paper is arranged as follows:
Section 2 introduces related work. Section 3
introduces the algorithms we used. Section 4
introduces the experiments and results of this work.
Section 5 introduces conclusions and future work.
2 RELATED WORK
2.1 Intent Recognition Algorithms
Since the formal definition of planning recognition
process was proposed in 1978(Schmidt et al., 1978),
scholars have started to study methods for plan
recognition. A method of generalized planning
recognition was proposed in 1986(Kautz & Allen,
1986), which describes task plan recognition with a
planning graph, represents the decomposition of the
task with the vertices of the graph, and proposes to
use the graph overlay for the solution of the problem,
which to some extent laid the foundation for
subsequent research. This method, although efficient,
assumes that the top-level goal of plan is unique and
does not consider the different priori probabilities of
different goals.
The Symbolic Plan Recognition (SBR) method
was proposed in 2005 (Avrahami-Zilberbrand &
Kaminka, 2005), which efficiently implements plan
recognition using tagging and back propagating, and
can quickly give partial solutions thus applying to
multiple aspects, but the efficiency decreases when
multiple plans are run concurrently. Further, the
authors proposed Utility-based Plan Recognition
(UPR)(Avrahami-Zilberbrand & Kaminka, 2007),
which can recognize multiple plans in overlapping
and interleaved contexts. The SBR family of
algorithms runs efficiently and can produce results in
each time and is usually used as a frequent choice of
recognition method by researchers.
A probabilistic planning recognition algorithm
based on planning tree grammar was proposed in
2009(Geib, 2009), which regarded plan recognition
as the parsing of the grammar tree, which effectively
solved the plan recognition in the case of multiple
concurrent plans, but it needs to construct a complete
parsing set. In the same period, a Planning
Recognition as Planning (PRaP) approach was
proposed in 2009(Ramírez & Geffner, 2009), which
used planning techniques to solve the goal
recognition problem by comparing the marginal cost,
which is the difference between the consistency of a
given observation and the best plan, between different
plans for the same goal through multiple invocations
of the AI planning system. This method is limited by
the fact that it can only reason about one plan at a time
and is computationally expensive.
Since then, attention has been paid to improving
the performance of the recognizer. A cost-based goal
recognition method that improves the speed of the
recognizer compared to PRaP, but is limited to the
path planning domain(Masters & Sardina, 2017). A
method of sampling the parse space using Monte-
Carlo tree search can significantly improves the speed
of solution compared to full parse (Kantharaju et al.,
2019).
2.2 Behavior Modelling Algorithms
Currently, commonly used behavior modeling
methods include, but are not limited to, the behavior
tree (BT), the finite state machines (FSM), and the
dynamic script (DS).
A rule-based behavior decision-making algorithm
for unidirectional two-channels by combining fuzzy
inference with a finite state machine was proposed in
2023(WANG Liang et al., 2023). A vehicle-level
expected functional safety hazard recognition method
based on a model of finite state machine was
proposed in 2023(XIONG Lu et al., 2023). Due to the
special structural characteristics, finite state machines
can only save a finite number of steps of state transfer,
so it is difficult for the FSM system to monitor the
historical execution flow of the transfer from the
initial state to the final state, and vice versa.
Dynamic Scripts (DS) is a reinforcement learning
technique based on rule scripts proposed in
2006(Spronck et al., 2006). In 2015, an Evolution
Dynamic Script (EDS), which embeds an evolution
approach to discovering new rules during DS learning
Combine Intent Recognition with Behavior Modeling in Teaching Competition Military Simulation Platform
457
was proposed in 2015(Kop et al., 2015). The
representation of rule scripts improves the
comprehensibility of the model, but the quality of the
rule base greatly affects the quality of the generated
model.
As a mathematical model, behavior tree describes
the transfer between finite tasks in a modular way,
which allows the creation of complex tasks with
simple tasks without considering the execution
process of the underlying simple tasks(XIAO Zichao,
2020), and is commonly used for the execution of
tasks in fields such as computer science, control
systems, robotics, and video games.
A behavior tree-based CGF behavior modelling
was conducted in 2019(Fu Yanchang, 2019), which
decomposed complex mission objectives into a
hierarchical structure represented by behavior
subtrees, and optimized the behavior tree by
introducing machine learning methods to assist the
modeling. In 2018, an integrated framework
including a case-based reasoning evolution behavior
tree, and reinforcement learning to facilitate CGF
autonomous behavior modelling was
proposed(Zhang et al., 2018).
Based on the behavior tree, a paper designs an
autonomous generation framework of CGF decision
model, which used an evolution behavior tree
algorithm based on static constraints to efficiently
generate behavior tree decision model according to
expert domain knowledge(Jie Yang, 2021). Since this
paper is very inspiring, it will be used as an important
paper for our reference.
Most of these scholars are limited to one type of
research direction. In fact, it is the merging of
behavior modeling and intent recognition research
that can advance the development of cognitive
intelligence in AI. In this paper, behavior modeling
and intent recognition are merged and simulated and
experimented in the TSMCP, which can provide more
comprehensive and accurate solutions for practical
applications and promote the development of related
fields.
3 BACKGROUND APPROACHES
This section provides some background on simulation
environment, behavior tree and SBR. It includes
behavior tree basics and SBR-related representations.
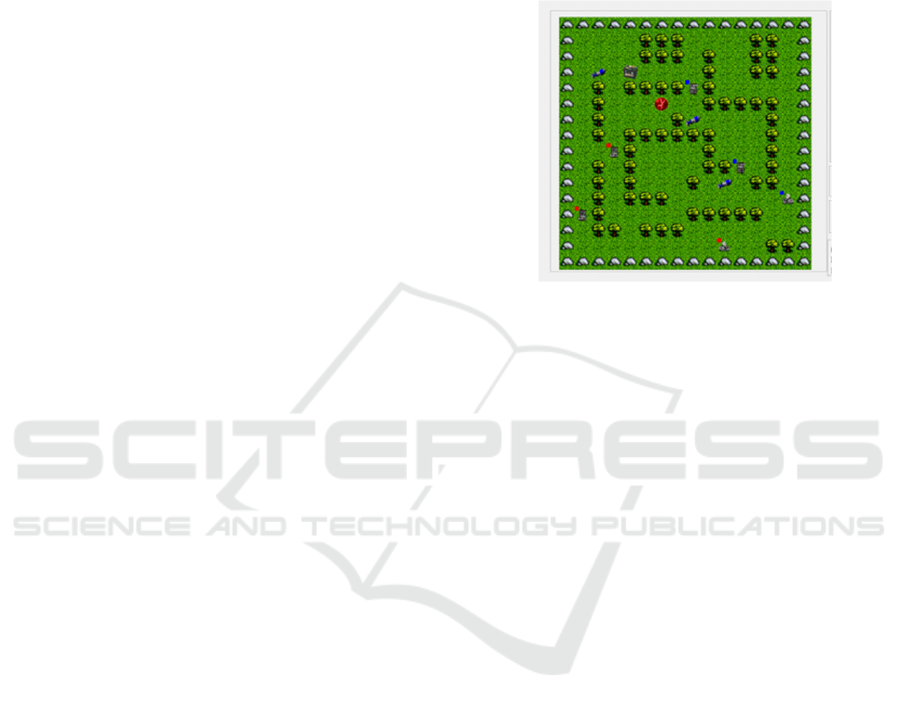
3.1 Simulation Environment
TankSimV1.20 simulation environment is a TCMSP
developed by the College of Systems Engineering,
National University of Defense Technology in 2020.
In this environment, the user can generate tank
platoons and assign behavior tree rules to each tank.
Under the guidance of the behavior tree rules, the
tanks can roam around the map and complete the
annihilation mission. Figure 2 shows the simulation
environment.
Figure 2: Simulation Environment TankSim V1.20.
The environment is set as follows: based on the
TankSimV1.20 simulation environment, the tank
platoons of both sides, red and blue, meet each other
on a certain plain terrain, which consists of 14*14
squares. Both sides need to carry out annihilation
tasks within a certain period. In this scenario, both
sides carry a certain number of missiles to attack each
other and can open the shield to defend against
missiles. Both tanks are equipped with a series of
sensors to detect each element on the map. The tank
that defeats the opponent or has the most resources
remaining in a limited time wins.
3.2 Evolution Behavior Tree
Behavior tree is used to control the actions of tanks,
writing different behavior tree rules for tanks can
make tanks realize different actions. Tanks with
different behavior trees achieve different results in the
competition, for example, tanks that only attack will
not avoid the missile attack of enemy tank and will
suffer heavy losses in the ambush; tanks that only
escape will not attack the enemy tanks and will not
win the war. Therefore, the tank behavior tree rule
determines the victory or defeat of tanks in combat
simulation.
Evolution algorithms, inspired by the evolution
mechanisms of biological populations in nature, can
search for optimal solutions to optimization problems
and are known as intelligent methods, highly robust
and adaptive, as well as being implicitly parallel and
self-learning. Inspired by this paper(Jie Yang, 2021),
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
458
we used the proposed evolution behavior tree
algorithm to generate an agent behavior model,
shown in Algorithm 1.
Data: Parameters
Output: Best behavior tree model
for i ∈ epoch
Selection
Generate New
Crossove
r
Mutation
end
return Behavior Tree Model
Algorithm 1: Evolution Behavior Algorithm.
3.3 SBR Algorithm
Symbolic Plan Recognition (SBR) was proposed in
2005 inspired by automated planning methods, which
are more efficient at runtime at the expense of
solution completeness and can produce partial results
in each time. Therefore, this method is chosen for this
paper for intelligent body intent recognition
(Avrahami-Zilberbrand & Kaminka, 2005).
The SBR algorithm, shown in Algorithm 2,
consists of the following three steps: describing the
behavior of the intelligent body using the Plan
Library (PL); efficiently matching the observations
with the plans in the PL(CurrentStateQuery); and
inferring the plan path (PropagateUp).
Data: Observations, PL
Output: Plan Path
for o ∈ Observations
CurrentStateQuer
y
()
Propa
g
ateUp()
end
return Plan Path
Algorithm 2: Symbolic Plan Recognition.
4 EXPERIMENTAL STUDY
In the experimental study, train against manually set
behavior tree scripts to generate superior behavioral
tree rules by EBT algorithm. The generated behavior
tree was used to guide the blue decision and the
simple behavioral tree was used to guide the red
decision. The two are played against each other under
the above rules, and the survival rate and the energy
remaining are used as the recognition evaluation
metrics.
4.1 Behavior Tree
Firstly, based on the specific requirements of
TankSimV1.20, we design the specific conditions and
action nodes. Then the script was manually written as
an adversarial script model. Finally, the results were
analysed by evolution behavior tree algorithm.
Set the Base Node of the Behavior Tree
We set the basic nodes of the behavior tree like Figure
3. The meaning of each node in the figure is its
English meaning, where the ellipse represents the
condition, and the square represents the action.
?
RetreatMove
RetreatMove
Attack
Attack
Turn
Turn
RetreatTurn
RetreatTurm
TurnToFire
TurnToFire
MoveToGoal
MoveToGoal
Figure 3: The behavior tree base nodes.
Set Parameters of EBT Algorithm
The population size is set to 100; the rest of the
parameters are set as listed in the Table 1.
Table 1: The parameters for the evolution behavior tree.
Paramete
r
Value
Population Size 100
Evolution Epoch 100
Initial minimum len
g
th 14
Initial maximum len
g
th 18
Crossover probabilit
y
0.8
Mutation probabilit
y
0.05
Selection probabilit
y
0.1
N
ew unit probabilit
y
0.05
Set Confront Script Model
The confront model we used to train the tank shows
in Figure 4.
EBT Generates Model
With a crossover probability of 0.6, the EBT
performance is optimal, and the population has the
highest average fitness value. Under the crossover
probability of 0.5 and 0.6, the EBT population
converges more slowly, and it starts to converge only
in
40 and 50 generations, respectively. The fitness
Combine Intent Recognition with Behavior Modeling in Teaching Competition Military Simulation Platform
459
?
MoveToGoal
MoveToGoal
Attack
Attack
RetreatTurn
Attack
TurnToFire
TurnToFire
Figure 4: The confront behavior tree nodes.
to more than 0, which indicates that the behavior tree
generated by the EBT under this probability is
sufficiently strong to cope with the environmental
changes. Figure 5 illustrated the fitness curve at
different probabilities.
Figure 5: Fitness curve at different probabilities.
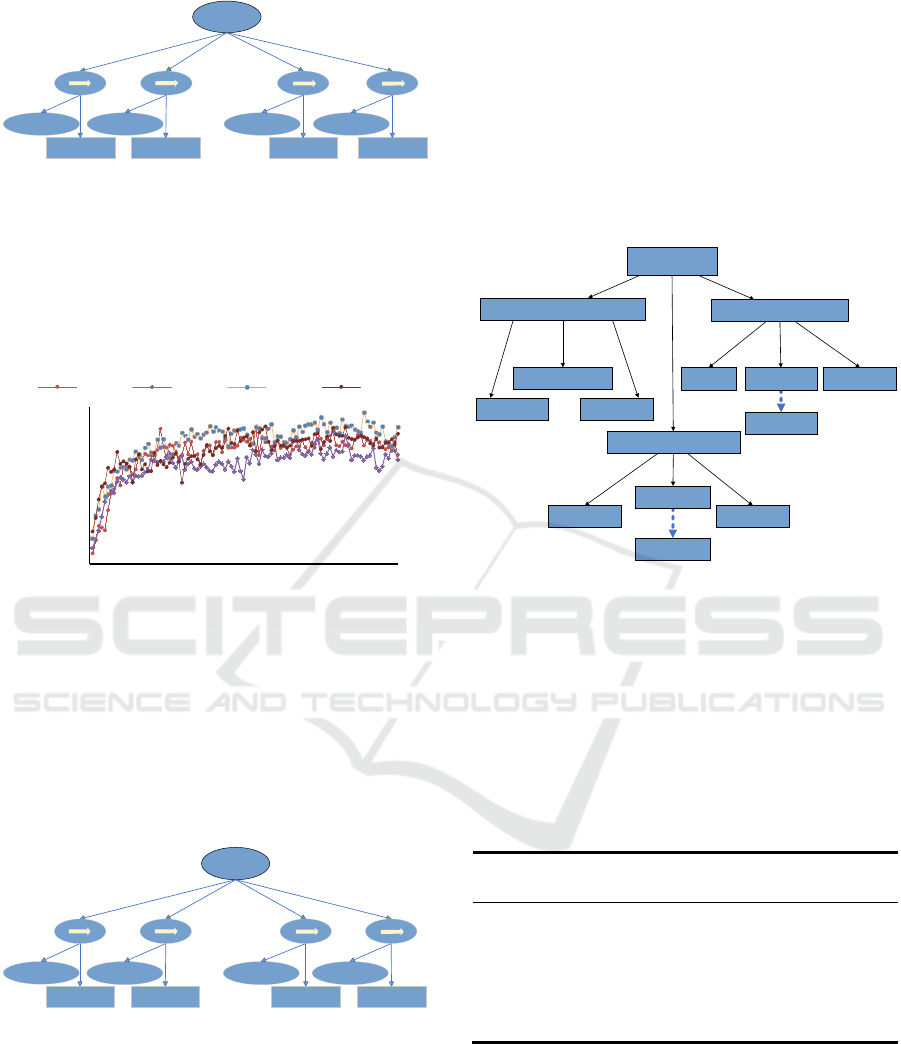
The evolution behavior tree corresponding to the
highest average fitness value is selected as the final
more excellent behavior tree, and the evolution with
the highest average fitness value is the 50th
generation of evolution, with a fitness value of 32.
Figure 6 shows the best behavior tree model of the
tank.
?
Attack
Attack
TurnToFire
TurnToFire
MoveToGoal
MoveToGoal
Turn
Turm
Figure 6: The best behavior tree model of the tank.
4.2 SBR Recognition Effect
This section analyses the recognition effects of two
types of behavior trees given to red tank, one is a
simple behavior tree with only roaming on the map,
and the other is a complex behavior tree with both
roaming and attacking functions. The opposing tank
has complex behavior tree rules generated by EBT.
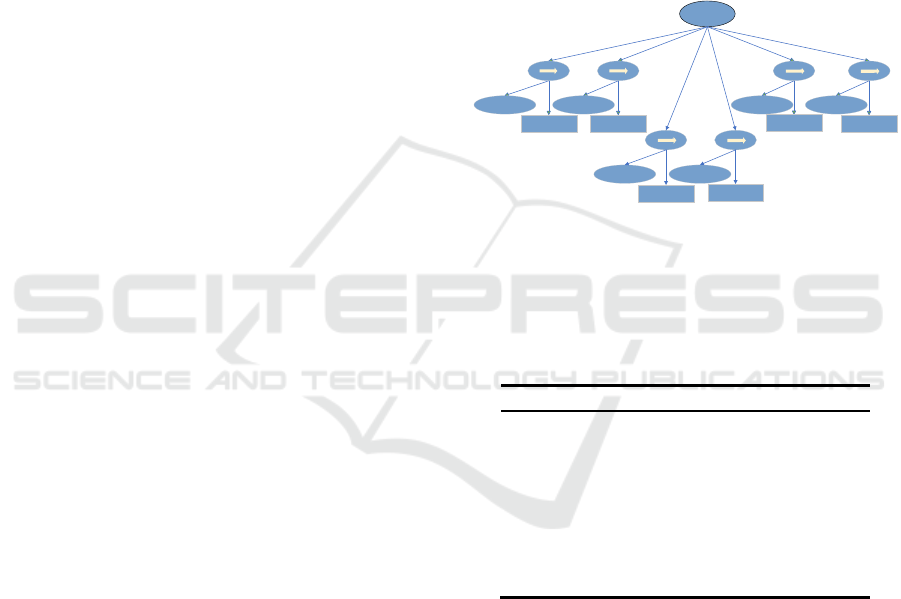
4.2.1 Simple BT
The roaming simple behavior tree plan library is
shown in Figure 7(Mirsky et al., 2022). From this
plan library, the tank can perform include simple
actions such as steering to turn on the radar, turning
backward, etc. Solid lines represent how each node is
decomposed into other nodes and finally to actions.
Dashed lines show the order by which the nodes
should appear.
Wander
Turn&OpenRadar
Turn
Radar on
Shields on
Power Set
Forward&ControlRadar
Control Radar
Forward Shields Off
CheckRadarWave
Move Radar on Shields on
Power Set
Figure 7: The simple BT example.
Firstly, to facilitate the analysis, only add the red
and blue sides a tank respectively. Both sides of the
tanks randomly appeared in the map when the
simulation beginning. Because the red side has no
attack ability, the end of the run shows that the blue
tank wins. The recognition effect is as shown Table 2,
which shows SBR has a perfect 100% recognition
rate for simple behavior trees.
Table 2: The simple BT recognition results.
Observation Recognition path Rate
Turn
Turn & Open
Rada
r
-Turn
100
Forward
Forward & Control Radar-
Forwar
d
100
Shields off
Forward & Control Radar-
Shields off
100
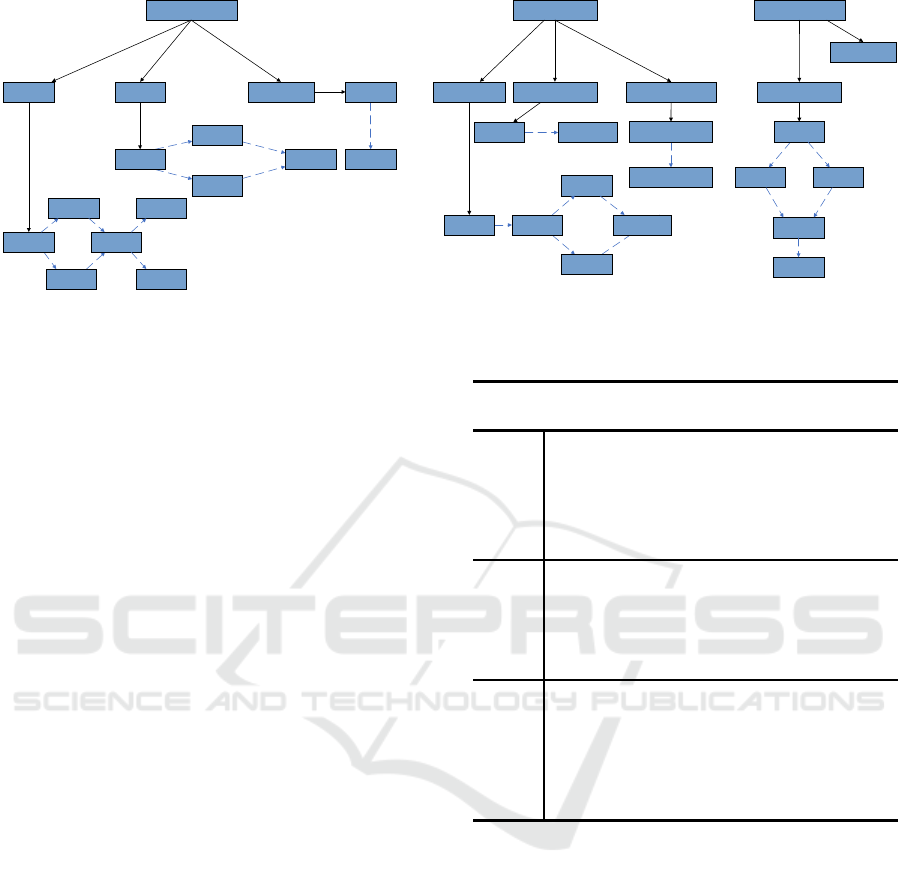
4.2.2 Complete BT
To verify the correctness of the SBR algorithm in
recognizing complex behavior tree, 10 groups of
experiments are carried out. The initial tank location
was randomized for each set of experiments and 10
steps of the actions of tank were analyzed for each
experiment.
-230
-180
-130
-80
-30
20
70
0 20406080100
Fitness
Epoch
Confront Results
CP=0.8 CP=0.7 CP=0.6 CP=0.5
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
460
Right
Retreat
Slide&ShiledsOn
Slide
Turn Left
Shields On
Turn Right
Moveforward
Forward&ShiledsOn
Shields On Moveforward
Backward&ShiledsOn
Shields On
Movebackward
Chase
Turn&OpenRadar
Turn
Radar On
Power Set
Forward
Left
Attack
Fire&ShiledsOn Fire
Shileds On
Slide
Turn
Right
Forward
Left
Turn&Fire
Turn
Right
Fire
Left
Left
Right
Figure 8: The complete BT example.
Since each step of the tank executes three or two
actions of the top-level plan, and there is overlap in
actions between the top-level plans, the tank plan
library can be set to be fully distinguishable or
partially distinguishable. The fully distinguishable
case is like a simple behavior tree, with a recognition
rate of 100%. Therefore, our experiments focus on
analyzing partially distinguishable cases.
Plan library partially distinguishable means the
same action isn’t described with additional distinction
of different top-level plans, e.g., turn right belongs to
the same Wander and Chase top-level plans, but no
additional information is made for each. In this case,
the results of conducting 10 sets of experiments are
shown in Table 3.The experimental results show that
in the partially distinguishable case, the algorithm
recognizes all possible outcomes, and cannot infer the
exact action without additional information.
When the recognized action is Fire, since only the
Attack top-level plan contains it, the recognition rate
is 100%. However, when the recognized action is
Shields on, the recognition algorithm is unable to
determine exactly which plan it is since all three top-
level plans, Attack, Wander and Retreat, contain this
node. Nonetheless, if in practical applications, even if
there are multiple possible recognition results, these
results do not affect the correctness of the final
decision, we can still consider that the algorithm
performs well at the decision level.
4.3 Combination SBR with BT
In this section, the blue tank has the behavior rules
generated by the behavior tree, and the red side has
the simple rules. Use SBR to recognize actions of
blue and guide decision of red making based on the
recognition results. Analyze resource surplus of red
and its survival time.
Table 3: Partially distinguishable experiments.
Group Trial Recognition Actually
1
1 Attack/Wander/Retrea
t
Attac
k
2
Attack-Fire Attack
3
Wander/Attack/Chase
Wander
4
Wander Wander
…
5
1 Wander/Chase/Retrea
t
Wande
r
2Wande
r
Wande
r
4 Attack/Wander/Retrea
t
Attac
k
5 Attac
k
-Fire Attac
k
…
10
1 Attack/Wander/Retrea
t
Attac
k
2 Attac
k
-Fire Attac
k
3Wande
r
Wande
r
4Wande
r
Wande
r
5 Wander/Attack/Chase Wande
r
…
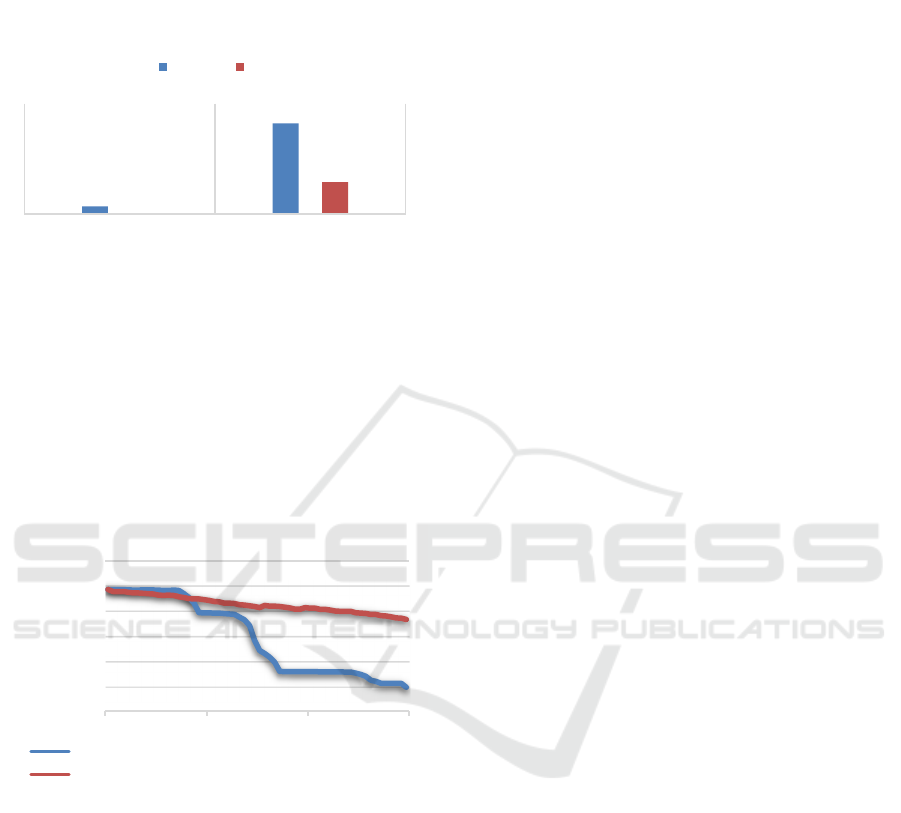
4.3.1 Compare Survival Time
To compare survival rates, we set up ten sets of
experiments, each comparing decision making
with/without SBR guidance. With SBR guidance, the
red tank could reason the action of blue, and change
self-state to protect self from the annihilate of blue,
while without SBR the red tank could only make
decisions based on the environment.
We set up the initial condition as a small range
annihilation battle, and the blue side will annihilate
the enemy in a limited step length and analyze the
decision-making and survival time of the red side, and
the results show in Figure 9.
The experimental results show that with SBR
guidance, the red tank easily escapes from the blue
tank encirclement, while the survival time is greatly
improved. This result suggests that in a combat
Combine Intent Recognition with Behavior Modeling in Teaching Competition Military Simulation Platform
461
environment where the self-party is at a disadvantage,
it can be assisted in escaping by making a recognition
decision through observation of the enemy.
Figure 9: The loss number and escape time results.
4.3.2 Compare Energy Changes
To compare energy changes, we set up 10 sets of
experiments, each with 60-time stamp data
comparing decisions with/without SBR guidance.
Without setting initial conditions for the tanks, we
analyze the resource changes (in this case energy
changes) of the red tanks as they roam through the
environment, and the results show in Figure 10.
Figure 10: The energy change results.
The experimental results show that with SBR
guidance, the red tank consumes less resources. Since
it can recognize enemy movements and make
decisions, it can reduce the consumption of
unnecessary energy to detect the enemy. This result
suggests that in a combat environment where the
mission of the party is to explore the environment and
avoid the enemy, having SBR guidance reduces
energy consumption and allows the self-party to
explore deeper and find resources.
5 CONCLUSIONS
In this paper, we have combined intent recognition
with behavior modeling in TCMSP. Two methods,
including behavior modeling of EBT, intent
recognition of SBR are used. The framework of
application above is simple but inspiring.
Specifically analyze recognition effects of two
kinds of behavior rules of the tanks: simple roaming
and complex attack. Experiments show that the SBR
algorithm can recognize correctly up to 100% in the
case of fully distinguishable plan library, while in the
partially distinguishable libraries, affected by the
representation of plan library and the number of the
same actions, the average recognition correctness is
70% (in this paper).
At the same time, in the process of simple rules
possessed by the red tank, the results of SBR
recognizing the blue are used to assist the decision-
making of the red side. Experiments show that under
annihilation war, the red side survives longer and
escapes easily; under resource war, the red side
consumes less energy. These results show that
effective recognition of complex behaviors of tank
can provide strong support for intelligent decision-
making.
Though this work is quite suggestive but still
simple, problems are more complex and adversarial
are still open in the future. The proposed approach
could be enhanced by the following future work:
(1) Obtain the PL of the observed Agent
automatically by learning algorithms and LLM.
Solving the PL Representation Problem by a priori
probability.
(2) Apply modeling and recognition methods to
more complex systems like multiagent.
REFERENCES
Avrahami-Zilberbrand, D., & Kaminka, G. (2005, July 30).
Fast and Complete Symbolic Plan Recognition.
International Joint Conference on Artificial
Intelligence.
Avrahami-Zilberbrand, D., & Kaminka, G. (2007, July 22).
Incorporating Observer Biases in Keyhole Plan
Recognition (Efficiently!). AAAI Conference on
Artificial Intelligence.
Fu Yanchang. (2019). Research on CGF Behavior Model
Based on Behavior Tree [M.E., National University of
Defense Technology].
Geib, C. (2009). Delaying Commitment in Plan Recognition
Using Combinatory Categorial Grammars.
Proceedings of the 21st International Joint Conference
on Artificial Intelligence.
7
82
1
29
LOSE ESCAPE TIME
Annihilate War
No SBR SBR
0
200
400
600
800
1000
1200
1 163146
Energy
Time Stamp
Energy Change
SBR
No SBR
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
462

Jie Yang. (2021). Research on Generation Method of
Behavior Tree Decision Model for Computer
Generated Forces(CGFs) [M.E., National University
of Defense Technology].
Kantharaju, P., Ontanon, S., & Geib, C. W. (2019). Scaling
up CCG-Based Plan Recognition via Monte-Carlo Tree
Search. 2019 IEEE Conference on Games (CoG), 1–8.
Kautz, H. A., & Allen, J. F. (1986). Generalized plan
recognition. Proceedings of the Fifth AAAI National
Conference on Artificial Intelligence, 32–37.
Kop, R., Toubman, A., Hoogendoorn, M., & Roessingh, J.
J. (2015). Evolutionary Dynamic Scripting: Adaptation
of Expert Rule Bases for Serious Games. Current
Approaches in Applied Artificial Intelligence, 53–62.
Masters, P., & Sardina, S. (2017). Cost-Based Goal
Recognition for Path-Planning. Proceedings of the 16th
Conference on Autonomous Agents and MultiAgent
Systems, 750–758.
Mirsky, R., Galun, R., Gal, K., & Kaminka, G. (2022).
Comparing Plan Recognition Algorithms Through
Standard Plan Libraries. Frontiers in Artificial
Intelligence, 4.
Mirsky, R., Sarah, K., & Christopher, G. (n.d.).
Introduction to Symbolic Plan and Goal Recognition.
Ramírez, M., & Geffner, H. (2009, July 11). Plan
Recognition as Planning. International Joint
Conference on Artificial Intelligence.
Schmidt, C. F., Sridharan, N. S., & Goodson, J. L. (1978).
The plan recognition problem: An intersection of
psychology and artificial intelligence. Artificial
Intelligence, 11(1), 45–83.
Spronck, P., Ponsen, M., Sprinkhuizen-Kuyper, I., &
Postma, E. (2006). Adaptive game AI with dynamic
scripting. Machine Learning, 63(3), 217–248.
WANG Liang, SU Dong-xu, YANG Xing-long, MA Wen-
feng, & WANG Zi-jun. (2023). Behavioral Decision
Based on Fuzzy Inference and Finite State Machine.
Value Engineering, 42(18), 133–135.
XIAO Zichao. (2020). Application Research of Behavior
Tree in Self-driving Behavior Planning Strategy [M.E.,
Lanzhou University].
XIONG Lu, JIA Tong, CHEN Junyi, XING Xingyu, & LI
Bo. (2023). Hazard Identification Method for Safety of
the Intended Functionality Based on Finite State
Machine. JOURNAL OF TONGJI
UNIVERSITY(NATURAL SCIENCE), 51(4), 616–
622.
Xu, K., Zeng, Y., Zhang, Q., Yin, Q., Sun, L., & Xiao, K.
(2019). Online probabilistic goal recognition and its
application in dynamic shortest-path local network
interdiction. Engineering Applications of Artificial
Intelligence, 85, 57–71.
Zhang, Q., Yao, J., Yin, Q., & Zha, Y. (2018). Learning
Behavior Trees for Autonomous Agents with Hybrid
Constraints Evolution. Applied Sciences, 8(7), 1077.
Combine Intent Recognition with Behavior Modeling in Teaching Competition Military Simulation Platform
463
