
Research on the Control of the end Effector of the Large-Scale
Curved Surface Compliant Polishing Robot
Runyang Zhan
Ningbo Institute of Technology, Zhejiang University, Ningbo, 315000, China
Keywords: Path Planning, Particle Swarm Optimization, Tuna Swarm Optimization.
Abstract: Curved surface parts find extensive use in various applications, and their surface quality plays a crucial role
in their performance. Industrial robot technology has advanced to the point where manual polishing can be
replaced. However, most robots currently employ position control, which has low accuracy in force control
and is unsuitable for the task. This paper aims to address the limitations of current research by focusing on an
improved control strategy that uses a parameter optimization algorithm to enhance the system's dynamic
performance. The main areas of research include the control of the end effector's contact force. Firstly, a
mathematical model of the pneumatic control loop is established and the system transfer function is obtained
through system identification. An improved optimization algorithm based on Particle Swarm Optimization
and Tuna Swarm Optimization is proposed to enhance the mechanism's control performance when dealing
with complex nonlinear systems. This algorithm has a faster convergence speed, higher convergence accuracy,
and stronger searchability.
1 INTRODUCTION
There has been some progress in the research of flat
automatic polishing due to the advancements in
industrial robot application technology. However,
there are still some problems to be solved in the
application of robots in the field of large curved
surface compliance polishing.
Managing compliance force for large curved
surfaces presents a challenging task due to strong
coupling, nonlinearities, and frequent changes. The
traditional control method's utilization is insufficient
to allow for the real-time adaptive adjustment of the
control proportional coefficient. This leads to
inadequate system performance and the incapability
to maintain a stable and consistent force processing
target. To enhance the control effect, it is imperative
to implement a control strategy that is combined with
a parameter optimization algorithm.
In the 21st century, robot technology has emerged
as a major high-tech industry that is playing a crucial
role in the lives and work of people across the globe.
With rapid developments in other industries like
automobiles and computers, robots are now widely
used in electrical and electronics, automobile, metal
and machinery manufacturing, plastics and chemistry,
food and beverage, and other industries. Industrial
robots are highly regarded in academia and industry
because of their flexibility, excellent motion stability,
and high-precision repetitive trajectory motion in a
large workspace (Yu 2020). Despite COVID-19's
impact on the industry in the first two years, the total
number of industrial robots installed worldwide has
continued to increase, with a ten-year growth rate of
211%. It is predicted that the number of industrial
robots installed globally will exceed 690,000 by 2025.
In today's technological era, using robots for
grinding and polishing is more popular than
traditional manual methods. This is especially useful
for large, curved parts that have complex and uneven
surface profiles, requiring precision in both profile
and surface finish. Nonetheless, it is worth noting that
industrial robots have lower position accuracy and
repeatability accuracy when compared to Computer
Numerical Control (CNC) machine tools (Zhang
2021). When it is located in different spatial poses, its
stiffness difference (Wen & Pagilla 2021) and
dynamic characteristic change (Amersdorfer et al.
2020) are relatively large, which will lead to
unpredictable processing vibration and structural
deformation (Zhu et al. 2022) during the polishing
process, and cannot achieve the expected processing
target. Therefore, it is necessary to It is considered to
Zhan, R.
Research on the Control of the end Effector of the Large-Scale Curved Surface Compliant Polishing Robot.
DOI: 10.5220/0012869900004547
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Data Science and Engineering (ICDSE 2024), pages 599-607
ISBN: 978-989-758-690-3
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
599

adjust and optimize the sensor technology to monitor
the grinding and polishing process by designing and
improving the control algorithm.
In recent years, there has been substantial research
conducted on the technology of curved surface
polishing utilizing robots, both domestically and
internationally. Many scholars have analyzed the
limitations inherent in the existing tool contact state
research and have proposed new and improved
methods. For instance, Xie Liujie of South China
University of Technology has enhanced the surface
material removal depth model, proposing a multi-
directional three-dimensional curved surface grinding
and polishing optimization cycloidal machining
trajectory based on the Angle Based Flattening++
(ABF++) algorithm. This method was verified
through experimentation to improve process control
(Xie 2018). Furthermore, Zhang Sui of Soochow
University has focused on refining the polishing path
and process plan and processing Off-axis aspheric
mirror elements with good form error (Zhang 2021).
Yalun Wen et al. presented a new 3D path
tracking control framework based on the Hermite-
Simpson collocation method, which determines the
dynamically feasible Cartesian space processing path
and the maximum constant translation speed. They
built a robot for the 3D path tracking control grinding
and polishing experimental platform, which
improved the overall performance of the robot
grinding and polishing system and met the surface
finishing requirements of curved surface parts (Wen
& Pagilla 2021). Finally, Manuel Amersdorfer et al.
have proposed a method utilizing distance sensor data
to create an approximate model of surface
topography, replacing the traditional prior model.
They have built a free-form surface force-controlled
robot automatic polishing system for real-time path
tracking, which accurately controls the normal
contact force of grinding and polishing (Amersdorfer
et al. 2020).
To solve the problems in the above analysis, this
paper conducts the following innovative research.
Introducing a new parameter optimization algorithm
called Improved Tuna Swarm Optimization - Particle
Swarm Optimization (ITSO-PSO) combines tuna
with particle swarm optimization. This algorithm
boasts fast convergence speeds, high precision, and
excellent search capabilities. It excels at dynamic
tuning of control parameters and performs well on
complex nonlinear multivariable systems with
minimal overall error.
2 PARAMETER OPTIMIZATION
2.1 Particle Swarm Optimization
Algorithm
The Particle Swarm Optimization (PSO) algorithm is
a type of swarm intelligence evolutionary algorithm
utilized to optimize nonlinear functions. Its creation
is credited to James Kennedy, an American
psychologist, and Russell Eberhart, an electrical
engineer, in 1995 (Kennedy & Eberhart 1995).
Taking inspiration from the foraging behavior of
birds, the algorithm treats a flock of birds as massless
particles. The positions the particles pass through
during flight are considered potential solutions to the
optimization problem at hand. As particles fly, they
search for viable solutions, their velocity and position
being the key factors influencing their progress.
Further, extend the particle to n-dimensional space,
then the position vector 𝑋
=
𝑥
,𝑥
,⋯,𝑥
of
particle i in n-dimensional space, and the flight
velocity vector 𝑉
=
𝑣
,𝑣
,⋯,𝑣
. Choose the
suitable fitness calculation function as the test
function, assign the initial position and speed to the
particle swarm randomly, identify the optimal
position of an individual particle and the group of
particles at present, evaluate the fitness of the particle,
and progressively revise the position and velocity of
the swarm until the ultimate position of the particle
swarm is attained.
The speed iteration of the classic PSO algorithm
is shown in equation (1), and the position iteration is
shown in equation (2),
(𝑉_𝑖^(𝑘 + 1)=𝑤𝑉_𝑖^𝑘+ 𝑐_1 𝑟_1 (𝑃_𝑏𝑒𝑠𝑡 − 𝑋_𝑖^𝑘 ) +
𝑐_2 𝑟_2 (𝐺_𝑏𝑒𝑠𝑡− 𝑋_𝑖^𝑘 ),)
(1)
𝑋
=𝑋
+𝑉
. (2)
The equation includes several variables: k
denotes the current iteration number of the particle,
while w represents the inertia factor, which balances
global and local optimization. Additionally, 𝑐
and 𝑐
represent learning factors, which reflect individual
and group cognitive abilities respectively, and 𝑟
and
𝑟
represent random numbers within the range [0,1].
Finally, uppercase 𝑃
represents the optimal
position of a single particle, while uppercase 𝐺
represents the optimal position of the entire particle
group.
To initiate the PSO algorithm process, the first
step entails initializing the particle swarm. This
includes randomly generating the starting position
and velocity, as well as selecting appropriate values
for the number of iterations, population size, particle
dimension, inertia factor, and learning factor. In the
subsequent step, a fitness function is adopted and
ICDSE 2024 - International Conference on Data Science and Engineering
600

employed to compute the fitness value of each
particle. The third step involves updating each
particle by comparing its fitness with its historical
optimal value. The fourth step involves updating the
particle swarm by comparing each particle's fitness
with its historical optimal value. In the fifth step, the
velocity and position of the particles are updated
according to equations (1) and (2). Finally, the loop
end condition is evaluated to determine if it has been
met. If not, the process returns to step 2 and continues
to execute.
2.2 Tuna Swarm Optimization
Algorithm
The Tuna Optimization Algorithm (TSO) is a global
meta-heuristic optimization algorithm that simulates
the spiral and parabolic foraging behaviors of tuna in
a swarm-based approach (Xie et al. 2021). Tuna
employs distinct foraging methods, namely the spiral
and parabolic techniques. The spiral approach
involves swimming in an upward spiral to contain
their prey in a confined area for more efficient
feeding, while the parabolic technique entails chasing
the tuna in front of them to create a parabolic shape
for capturing prey. As for initializing particles for the
TSO algorithm, a precise calculation equation is
implemented,
𝑌
=𝑟𝑎𝑛𝑑⋅
(
𝑏
−𝑏
)
+𝑏
,
(
3
)
where 𝑌
represents the initial position of the tuna,
and 𝑏
and 𝑏
represent the maximum and
minimum values of the search range. Further, the
position of the tuna population during spiral foraging
can be deduced,
𝑌
=
⎩
⎪
⎪
⎨
⎪
⎪
⎧
𝛼
⋅(𝑌
+𝛽⋅𝑌
−𝑌
) + 𝛼
⋅𝑌
,𝑘=1;𝑟𝑎𝑛𝑑<
𝑘
𝑚
𝛼
⋅𝑌
+𝛽⋅𝑌
−𝑌
+ 𝛼
⋅𝑌
,𝑘𝜖
2,𝑚
;𝑟𝑎𝑛𝑑<
𝑘
𝑚
𝛼
⋅𝑌
+𝛽⋅𝑌
−𝑌
+ 𝛼
⋅𝑌
,𝑘=1;𝑟𝑎𝑛𝑑≥
𝑘
𝑚
𝛼
⋅𝑌
+𝛽⋅𝑌
−𝑌
+ 𝛼
⋅𝑌
,𝑘𝜖
2,𝑚
;𝑟𝑎𝑛𝑑≥
𝑘
𝑚
.
(
4
)
The calculation equation of each coefficient is
𝛼
=𝛼
+
(
1−𝛼
)
∙
𝑘
𝑚
,
(
5
)
𝛼
=
(
1−𝛼
)
−
(
1−𝛼
)
⋅
𝑘
𝑚
,
(
6
)
𝛽=𝑒
⋅
⋅ cos
(
2𝜋𝛽
),
(
7
)
𝑙=𝑒
,
(
8
)
where 𝑌
indicates the position of the jth particle
after the (𝑘+1)th iteration; 𝑌
indicates the
position of the current optimal particle; the subscripts
𝛼
and 𝛼
refer to weight coefficients that influence a
particle's movement towards the optimal particle and
its previous trend, respectively. These coefficients
effectively control the particle's ability to conduct
both global and local searches; 𝛼
indicates the
degree to which the particle follows the optimal
particle and the previous article in the initial state; k
indicates the current iteration number; m indicates the
maximum The number of iterations; 𝛽 represents the
coefficient of the particle and the optimal particle or
random particle, 𝛽
represents the random number in
the value range [0,1]; 𝑙 represents the coefficient
related to the maximum number of iterations m and
the current number of iterations k, there is no actual
physical meaning.
It is assumed that when feeding, tuna has a 50%
chance of choosing a parabolic path and a 50%
chance of feeding randomly. The mathematical model
is
𝑌
=
𝑌
+𝑟𝑎𝑛𝑑⋅(𝑌
−𝑌
)+𝑞⋅𝑝
⋅(𝑌
−𝑌
),𝑟𝑎𝑛𝑑<0.5
𝑞⋅𝑝
⋅𝑌
,𝑟𝑎𝑛𝑑≥0.5
,
(
9
)
𝑝=1−
𝑘
𝑚
,
(
10
)
where the value of q is {-1,1}, which determines the
direction of the particle swarm foraging; p reflects
the process of foraging.
Research on the Control of the end Effector of the Large-Scale Curved Surface Compliant Polishing Robot
601
2.3 Improved Optimization Algorithm
Based on Tuna and Particle Swarm
Optimization
When tackling intricate problems with numerous
dimensions, the conventional PSO algorithm may
present a few limitations. While it boasts a rapid
search space velocity, it lacks local search
capabilities, causing the optimization to potentially
settle into a local optimum. Furthermore, insufficient
information exchange between particles may lead to
sluggish convergence, hindering the attainment of the
optimal solution (Song et al. 2021). The ITSO-PSO
algorithm combines the advantages of both
algorithms to enhance global and local search
performance.
The speed and position iterative calculation
equations of the ITSO-PSO optimization algorithm
are
𝕍
=
⎩
⎨
⎧
𝑤𝕍
+𝑐
𝑟
𝑀
−𝑍
+𝑐
𝑟
𝑀
−𝑍
,𝑟𝑎𝑛𝑑<
𝑡
𝑚𝑎𝑥𝑔𝑒𝑛
𝑤𝕍
+𝑐
𝑟
𝑀
−𝑍
+𝑐
𝑟
𝐺
−𝑍
,𝑟𝑎𝑛𝑑≥
𝑡
𝑚𝑎𝑥𝑔𝑒𝑛
,
(
11
)
𝑍
=
⎩
⎨
⎧
𝑤⋅𝑍
+𝑤⋅𝕍
, 𝑟𝑎𝑛𝑑<
𝑡
𝑚𝑎𝑥𝑔𝑒𝑛
𝑤⋅𝑍
+
(
1−𝑤
)
⋅𝕍
,𝑟𝑎𝑛𝑑≥
𝑡
𝑚𝑎𝑥𝑔𝑒𝑛
,
(
12
)
𝑀
=
𝑃
+𝐺
2
,
(
13
)
where 𝕍
and 𝑍
represent the speed and
position of the gth particle after the (𝑡+1) iteration,
maxgen represents the maximum number of iterations,
and 𝑀
represents the particle's personal best best
position and group best position average.
The optimization capabilities of a particle swarm
are influenced by the inertia factor and the learning
factor. A larger inertia factor means weaker local
optimization capabilities, while a smaller one leads to
weaker global optimization. When the learning factor
𝑐
is small, particles may struggle with local search
and become stuck in suboptimal situations, unable to
reach the global optimal solution. Similarly, when 𝑐
is small, particles may not communicate enough,
slowing down convergence and preventing the
discovery of an optimal solution. Therefore, it is
necessary to properly improve and optimize the
inertia factor and learning factor (Zhao et al. 2014),
and the changes are
𝑤=0.5⋅
(
𝑤
+𝑤
)
+0.5⋅
(
𝑤
−𝑤
)
⋅𝑡𝑎𝑛ℎ−4+
8⋅
(
𝑚𝑎𝑥𝑔𝑒𝑛 − 𝑡
)
𝑚𝑎𝑥𝑔𝑒𝑛
,
(
14
)
𝑐
=𝑐+
(
𝑐
−𝑐
)
⋅
𝑡
𝑚𝑎𝑥𝑔𝑒𝑛
,
(
15
)
𝑐
=
(
𝑐−0.5
)
+
(
𝑐−𝑐
)
⋅
𝑡
𝑚𝑎𝑥𝑔𝑒𝑛
,
(
16
)
where 𝑤
and 𝑤
represent the initial value and final
value of the inertia factor respectively.
To begin the ITSO-PSO algorithm, several
parameters must be initialized, including the learning
factor, inertia weight, maximum evolution times,
population size, and fitness function dimension.
Additionally, the value range of speed and position
must be limited and a fitness function must be
selected. Following this, a population is randomly
generated and the speed and fitness of each particle
are calculated. The best fitness values of the
individual and the group are then calculated and
updated accordingly. The algorithm then iteratively
updates the inertia factor, learning factor, particle
swarm velocity, and position using a ala while
preventing them from exceeding their range. To avoid
getting stuck at a local optimum, mutation seeds are
added. The algorithm continues until the end
condition is met, at which point the descending
optimization curve is output.
2.4 ITSO-PSO Algorithm Performance
Test
To compare the effectiveness of the ITSO-PSO
algorithm with the PSO algorithm, we selected five
classic test functions and conducted comparative
testing to verify the performance change (Huang et al.
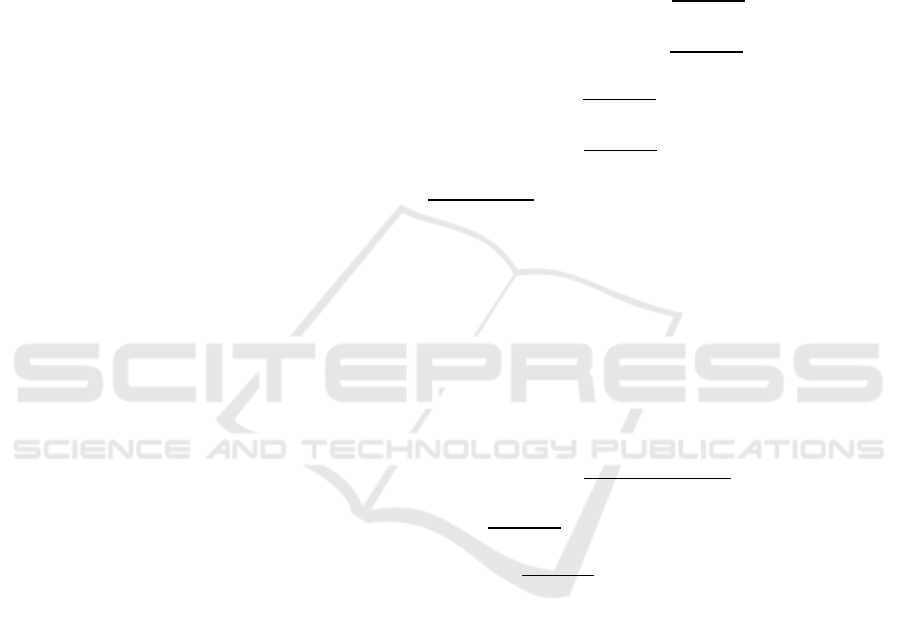
2018). In total, there are five test functions. Two of
them are unimodal test functions called Sphere and
Schwefel's Problem 2.22, which aid in determining
the algorithm's search accuracy and iteration rate. The
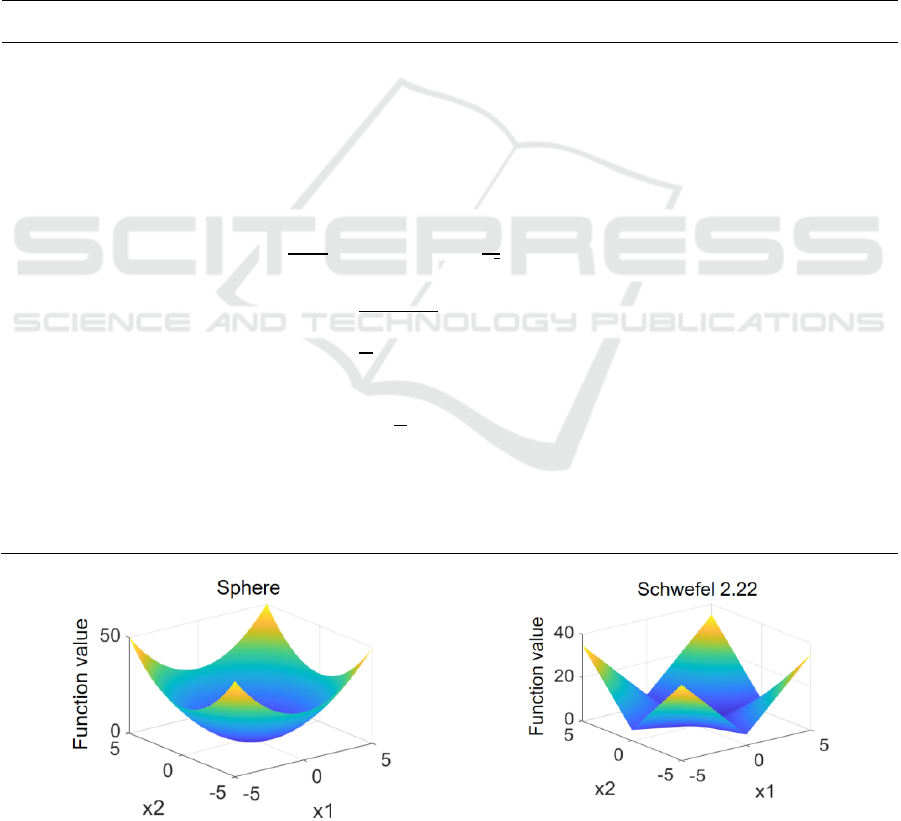
remaining three tests are multimodal test functions -
Griewank, Ackley, and Rastrigin - designed to
ICDSE 2024 - International Conference on Data Science and Engineering
602
prevent the algorithm from converging prematurely
by avoiding local optima. Table 1 provides the
optimal values and value ranges for all five test
functions, while Figure 1 visually represents the
definition domain and value range of the test
functions in three dimensions.
Use MATLAB R2019b version for code writing
and simulation testing, set the maximum number of
population iterations 𝑚𝑎𝑥𝑔𝑒𝑛=200; population size
G=100; inertia weight correlation coefficient w=0.9,
𝑤
=0.9, 𝑤
=0.4; learning factor correlation
coefficient c=1.5, 𝑐
=1.49345, 𝑐
=1.44345; set the
speed value range [-1,1]; set the position range
according to Table 1. After defining the initial
parameters, a specific test function is selected, and
varying variable dimensions are independently tested
for both algorithms, with each test run 30 times. For
each test where the fitness function converges (i.e.
when the fitness value is less than 0.001), the average
(AVG), standard deviation (STD), maximum (MAX),
minimum (MIN), and mean (MEAN) number of
iterations are documented. In cases where the number
of iterations is 200 and the fitness value is greater than
or equal to 0.001, the function is classified as not
having converged, and MAX, MIN, and MEAN are
marked as DNE. The outcomes of each test are
meticulously analyzed and documented in Table 2,
Table 3, Table 4, Table 5, and Table 6.
Table 1: The basic situation of 5 classic test functions.
Name
Equation Range
Optimal
value
Sphere
𝑓
=
(
𝑥
)
[-100,100] 0
Schwefel 2.22
𝑓
=
|
𝑥
|
+
|
𝑥
|
[-10,10] 0
Griewank
𝑓
=
1
4000
(
𝑥
)
−cos
𝑥
√
𝑖
+1
[-600,600] 0
Ackley
𝑓
=−20 ⋅ exp
⎝
⎛
0.2
1
𝑁
(
𝑥
)
⎠
⎞
−exp(
1
𝑁
cos(2𝜋𝑥
))+20+𝑒
[-32,32] 0
Rastrigin
𝑓
=𝑥
−10cos
(
2𝜋𝑥
)
+ 10
[-5.12,5.12] 0
(a) Sphere (
b
) Schwefel 2.22
Research on the Control of the end Effector of the Large-Scale Curved Surface Compliant Polishing Robot
603
(c) Griewan
k
(d) Ackle
y
(e)Rastrigin
Fi
g
ure 1: 3D visualization out
p
ut of test function.
Table 2: Comparison of 2 optimization algorithms for solving 5 test functions (variable dimension D=3).
Algorithm Index
𝑓
𝑓
𝑓
𝑓
𝑓
ITSO-PSO
AVG 0 0 0 0 0
STD 0 0 0 0 0
MAX 55 99 56 100 82
MIN 32 91 31 94 51
MEAN 46 95 44 98 66
PSO
AVG 0 0 0 0 0.13329
STD 0 0 0 0 0.33935
MAX 81 143 72 141 196
MIN 57 111 62 112 39
MEAN 73 128 67 130 110
Table 3: Comparison of 2 optimization algorithms for solving 5 test functions (variable dimension D=10).
Algorithm Index
𝑓
𝑓
𝑓
𝑓
𝑓
ITSO-PSO
AVG 0 0 0 0 0
STD
0 0 0 0 0
MAX 81 108 72 106 128
MIN 71 103 62 102 83
MEAN 76 106 68 104 89
PSO
AVG 0 0.00395 0 0.00093 5.98740
STD 0 0.00662 0 0.00007 3.40882
MAX 138 200 140 137 DNE
MIN 109 119 104 96 DNE
MEAN 126 169 119 114 DNE
Table 4: Comparison of 2 optimization algorithms for solving 5 test functions (variable dimension D=30).
Algorithm Index
𝑓
𝑓
𝑓
𝑓
𝑓
ITSO-PSO
AVG 0 0 0 0 0
STD
0 0 0 0 0
MAX 88 112 80 109 99
MIN 84 110 74 106 95
MEAN 86 111 77 108 96
PSO
AVG 0.00096 0.27348 0.00097 0.01208 23.64657
STD 0.00004 0.09489 0.00003 0.00351 9.75532
MAX 191 DNE 134 DNE DNE
MIN 138 DNE 91 DNE DNE
MEAN 168 DNE 115 DNE DNE
ICDSE 2024 - International Conference on Data Science and Engineering
604
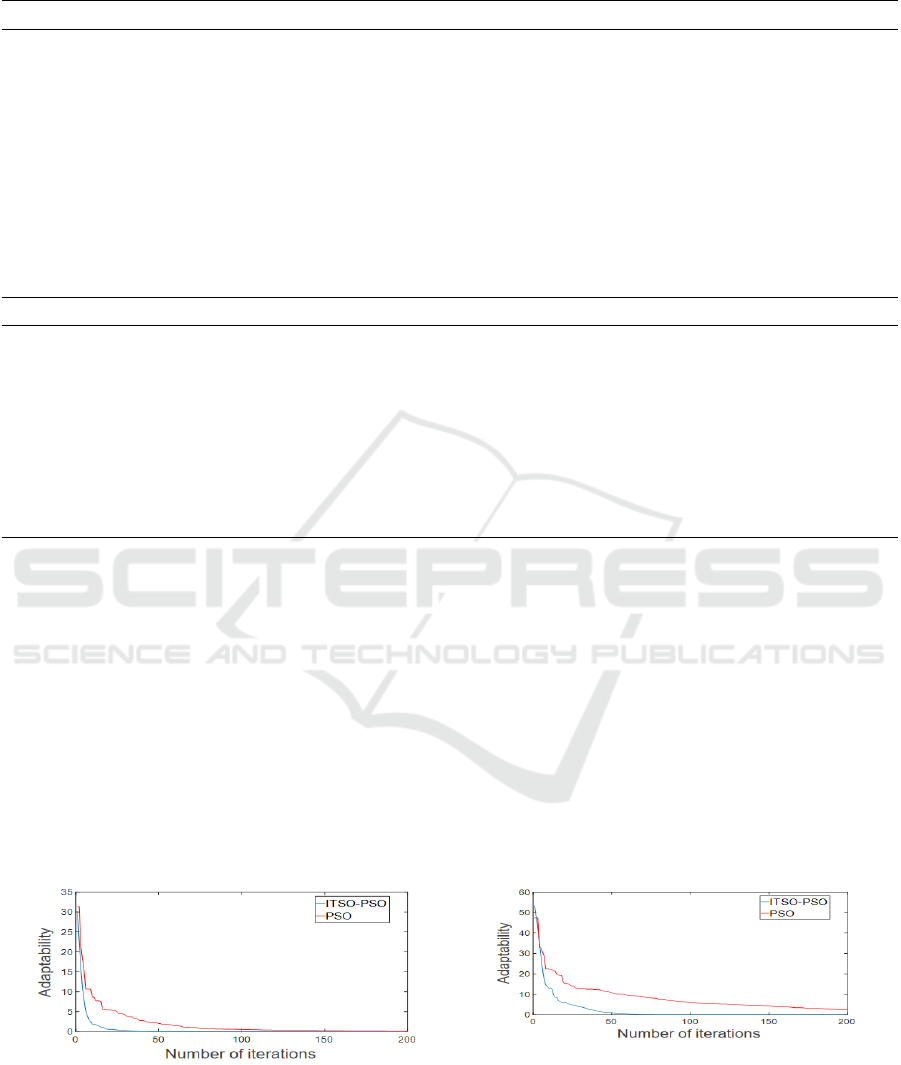
Table 5: Comparison of 2 optimization algorithms for solving 5 test functions (variable dimension D=50).
Algorithm Index
𝑓
𝑓
𝑓
𝑓
𝑓
ITSO-PSO
AVG 0 0 0 0 0
STD
0 0 0 0 0
MAX 90 114 82 109 99
MIN 86 111 75 107 97
MEAN 88 112 78 108 98
PSO
AVG 0.00723 0.91041 0.00098 0.05423 40.34964
STD 0.00207 0.17174 0.00002 0.00980 14.06941
MAX DNE DNE 192 DNE DNE
MIN DNE DNE 154 DNE DNE
MEAN DNE DNE 169 DNE DNE
Table 6: Comparison of 2 optimization algorithms for solving 5 test functions (variable dimension D=100).
Algorithm Index
𝑓
𝑓
𝑓
𝑓
𝑓
ITSO-PSO
AVG 0 0 0 0 0
STD
0 0 0 0 0
MAX 92 115 82 109 100
MIN 87 113 77 106 98
MEAN 89 114 79 108 99
PSO
AVG 0.07823 2.64485 0.00169 0.14961 177.16030
STD 0.01089 0.22698 0.00023 0.01661 47.02125
MAX DNE DNE DNE DNE DNE
MIN DNE DNE DNE DNE DNE
MEAN DNE DNE DNE DNE DNE
Based on the simulation results outlined in the
table, it's clear that both algorithms can achieve
iterative test value convergence when the variable
dimension is low. However, the traditional PSO
algorithm requires more iterations, and as the
variable dimension increases, some of its test
functions fail to converge. If the variable dimension
reaches a critical point, the PSO algorithm won't
converge, and each evaluation performance
indicator parameter will decline to varying degrees.
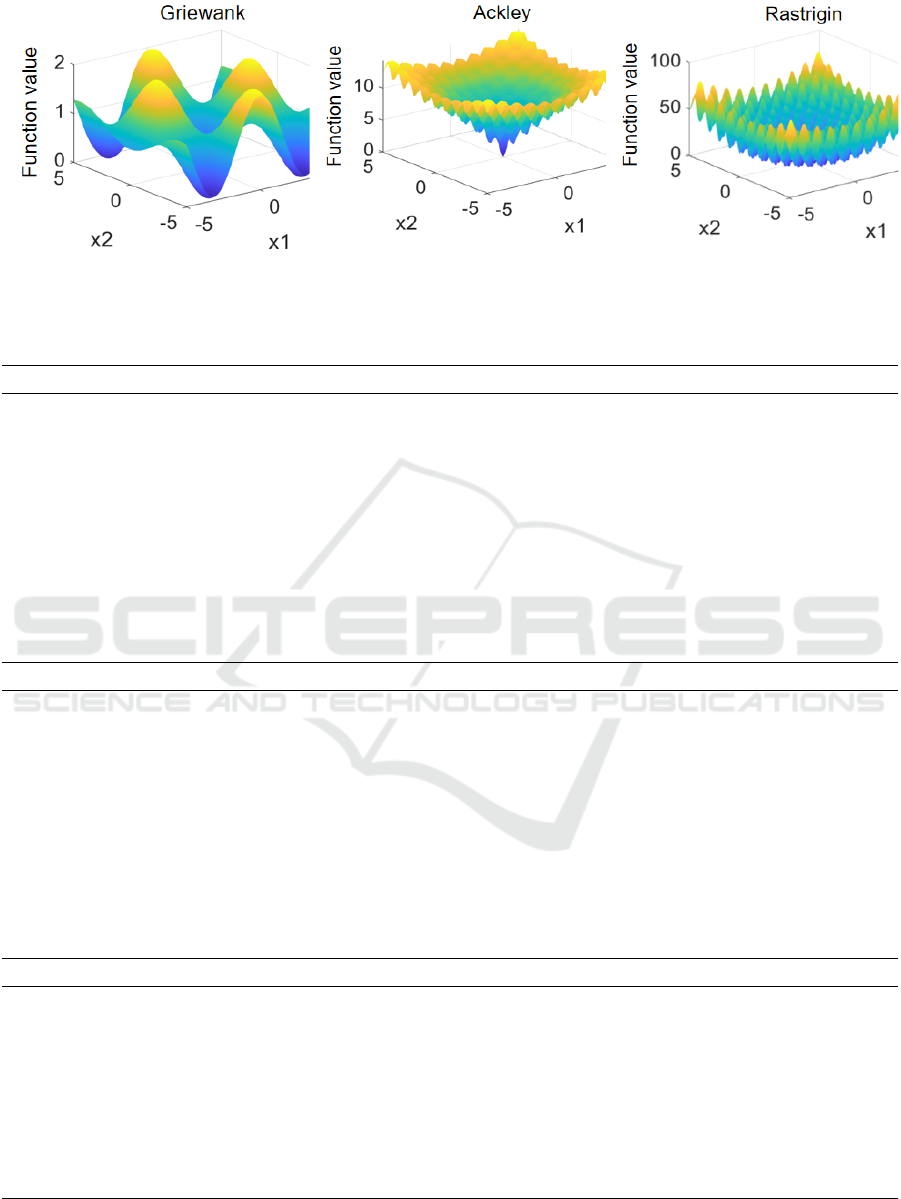
By analyzing the change curves of the five test
degree functions shown in Figure 2, we can see that
the proposed ITSO-PSO optimization algorithm can
achieve the theoretical optimal solution in all test
scenarios, meaning that the test function can
converge in any scenario. Compared to the
traditional PSO algorithm, the ITSO-PSO algorithm
achieves convergence with fewer iterations,
indicating a faster convergence rate. Additionally,
the ITSO-PSO algorithm is more robust, even when
the variable dimension increases from 100 to 500.
The average number of convergence times when the
algorithm reaches convergence does not increase
significantly, making numerical variable space
parameter optimization a valuable reference point,
as shown in Figure 3.
(a) Sphere (
b
) Schwefel 2.22
Research on the Control of the end Effector of the Large-Scale Curved Surface Compliant Polishing Robot
605

(
c
)
Griewan
k
(d
)
Ackle
y
(
e
)
Rastri
g
in
Figure 2: Five test function fitness change curves (D=100).
Figure 3: ITSO-PSO algorithm convergence times and variable dimension function curve.
In summary, the ITSO-PSO algorithm proposed
based on the TSO algorithm and the traditional PSO
algorithm solves the problem of premature
convergence that may fall into local extreme points
when solving complex nonlinear unimodal or
multimodal function problems. The test results show
that the ITSO-PSO algorithm has a fast convergence
speed, good global search ability and local search
ability, high convergence accuracy, and the ability to
optimize complex system parameters.
3 CONCLUSION
This paper centers around the precise manipulation of
the end effector on a polishing robot, specifically one
designed for curved surfaces. This paper has yielded
remarkable results thus far. This paper developed a
mathematical model that enables me to establish a
pneumatic control loop for each component and
pinpoint the transfer function of the pneumatic
control system. Ther proposed ITSO-PSO algorithm
has outperformed traditional PSO algorithms in terms
of faster convergence speed, increased accuracy, and
superior capabilities for both global and local
searches. Although the research has its limitations,
ICDSE 2024 - International Conference on Data Science and Engineering
606

there is potential for future development using
machine vision technology to track and monitor the
robot's polishing path and surface processing in real
time. This could enhance the system's intelligence to
a higher level.
REFERENCES
H. Yu, “Optimal design and experimental research of
industrial robot end grinding tool”, Jilin University,
2020.
S. Zhang, “Research on off-axis aspheric wheel polishing
technology based on industrial robots", Soochow
University, 2021.
Y. Wen and P R. Pagilla, “A novel 3D path following
control framework for robots performing surface
finishing tasks”, Mechatronics, 2021, 76: 102540.
M. Amersdorfer, J. Kappey and T. Meurer, “Real-time
freeform surface and path tracking for force controlled
robotic tooling applications”, Robotics and Computer-
Integrated Manufacturing, 2020, 65: 101955.
Z. Zhu, X W. Tang, C. Chen, F Y. Peng, R. Yan, L. Zhou,
Z P. Li and J W. Wu, “High precision and efficiency
robotic milling of complex parts: Challenges,
approaches and trends”, Chinese Journal of
Aeronautics, 2022, 35(2): 22-46.
L J. Xie, “Tool contact state analysis and multi-directional
trajectory process control for robot surface polishing”,
South China University of Technology, 2018.
S. Zhang, “Research on off-axis aspheric wheel polishing
technology based on industrial robots”, Soochow
University, 2021.
Y. Wen and P R. Pagilla, “A novel 3D path following
control framework for robots performing surface
finishing tasks”, Mechatronics, 2021, 76: 102540.
M. Amersdorfer, J. Kappey and T. Meurer, “Real-time
freeform surface and path tracking for force controlled
robotic tooling applications”, Robotics and Computer-
Integrated Manufacturing, 2020, 65: 101955.
J. Kennedy and R. Eberhart, “Particle swarm optimization,”
Proceedings of ICNN'95 - International Conference on
Neural Networks, Perth, WA, Australia, 1995, pp.
1942-1948 vol.4, doi: 10.1109/ICNN.1995.488968.
L. Xie, T. Han, H. Zhou, Z R. Zhang, B. Han and A. Tang,
“Tuna Swarm Optimization: A Novel Swarm-Based
Metaheuristic Algorithm for Global Optimization”,
Computational Intelligence and Neuroscience, 2021,
2021: 9210050.
B Y. Song, Z D. Wang and L. Zhou, “An improved PSO
algorithm for smooth path planning of mobile robots
using continuous high-degree Bezier curve”, Applied
Soft Computing, 2021, 100: 106960.
Z G. Zhao, S Y. Huang and W Q. Wang, “Simplified
particle swarm optimization algorithm based on
random inertial weights”, Computer Application
Research, 2014, 31(02): 361-363.
Y. Huang, H Y. Lu, K B. Xu and W Q. Shen, “A simplified
mean particle swarm optimization algorithm for
dynamically adjusting inertial weights”, Small and
Micro Computer Systems, 2018, 39(12): 2590-2595.
Research on the Control of the end Effector of the Large-Scale Curved Surface Compliant Polishing Robot
607
