
Traffic Flow Prediction Model Based on BDBO-TCN
Zhang Xijun and Chen Xuan
School of Computer and Communication, Lanzhou University of Technology, Lanzhou 730050, China
Keywords: Traffic Flow Prediction, TCN, DBO.
Abstract: In order to improve the accuracy of short-term traffic flow prediction and overcome the shortcomings of
single prediction model and the limitations of traditional depth learning based on experience to set
hyperparameters, a time convolution network (TCN) model based on improved dung beetle algorithm
(DBO) is proposed. In order to solve the problem of slow convergence of traditional TCN model, the dung
beetle algorithm is introduced, and the Bernoulli chaotic mapping algorithm is used to improve the initial
value, considering the randomness and diversity of the initialization of dung beetle algorithm, the traffic
flow prediction model based on BDBO-TCN is constructed. To verify the predictive effect of the
experiment, experiments were conducted on two different real data sets, the multi-step prediction is
compared with the TCN model optimized by DBO based on various chaotic mapping algorithms to further
verify the prediction performance of the model. This model is superior to other models.
1 INTRODUCTION
Traffic flow prediction is the basis of traffic control
and traffic guidance. At present, the common short-
term traffic flow prediction models are LSTM(Ma et
al., 2015), GRU (Wu et al., 2018), TCN(Lea et al.)
etc., in the field of traffic flow prediction, the
common optimization algorithms such as particle
swarm optimization (Kennedy and Eberhart) ,
genetic algorithm (Goldberg, 1989)etc., in this
paper, dung beetle Optimizer algorithm(Xue and
Shen, 2023) is used to solve the hyperparameters of
TCN model, and chaos mapping algorithm(Yu et al.,
2018)is introduced into intelligent optimization
algorithm to increase population diversity. Chaotic
mapping algorithms include Tent mapping(Zhao,
2012), Logistic mapping(Zhang and Liang, 2012)
Bernoulli mapping(Saito and Yamaguchi, 2016)and
so on. The hyperparameters of TCN are optimized
by DBO algorithm of dung beetle, and the traffic
flow prediction of TCN is made by the optimal
hyperparameters. The main contributions are as
follows:
(1) Aiming at the problem that the
hyperparameters of TCN are difficult to determine in
the traffic flow prediction, in this paper, TCN traffic
flow prediction model based on improved dung
beetle algorithm is designed by combining TCN
with improved dung beetle algorithm. The
simulation results show that the proposed model is
superior to other optimized TCN prediction models.
(2) Using the method of randomly generating the
initial population in traditional dung beetle
algorithm, the distribution of the initial population is
not uniform, which leads to the decrease of the
population diversity and the low quality of the
population, the problem of unbalanced global
exploration and local development capability affects
the convergence speed of the algorithm. In this
paper, chaotic maps are introduced to improve the
quality of initial population distribution in the search
space, thus strengthening the global search
capability.
2 MODEL
2.1 Dung Beetle Optimizer
Dung Beetle Optimizer (DBO) is a new heuristic
swarm intelligence optimization algorithm inspired
by the behavior of Dung beetles in nature. The dung
beetle algorithm selects the optimal solution by
modelling dung beetle, survival behavior , ball
rolling and dancing behavior, foraging behavior,
breeding behavior and stealing behavior.
The rolling behavior of dung beetles can be
divided into barrier mode and barrier-free mode. The
Xijun, Z. and Chen, X.
Traffic Flow Prediction Model Based on BDBO-TCN.
DOI: 10.5220/0012876100004536
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Data Mining, E-Lear ning, and Information Systems (DMEIS 2024), pages 31-36
ISBN: 978-989-758-715-3
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
31

rolling behavior of dung beetles is influenced by
celestial cue navigation, and the rolling position path
of dung beetles is changed by the change of light
intensity. The location update formula is shown
1
()
ttt
iii
x
XSgxX xX
+
′′ ′ ′′
=+××−+−
(1)
Where t is the number of current iterations,
which
1t
i
x
+
is the position information of the first
dung beetle during the t iteration, k is the deflection
coefficient and b is the natural coefficient,
||
tt
iG
x
x−
indicates the change of light intensity,
t
G
x
is the worst position in the current population.
The natural coefficient
α
of -1,1, when
α
= 1
means the natural environment does not affect the
original direction, when
α
= -1 means the natural
environment deviates from the original direction.
The
α
value is determined by the probability
λ
value.
When a dung beetle encounters an obstacle and
is unable to move forward, it changes the direction
and position of its ball by dancing. Update such as
type:
11
tan
tt tt
ii ii
x
xxx
θ
+−
=+ −
(2)
The position of the dung beetle does not change
when the angle of deflection of
θ
= 0,
2
π
,
π
Reproductive behavior dung beetles hide their
dung balls by rolling them to a safe area, providing a
boundary selection strategy to simulate the female
dung beetles spawning and brood areas. Female
dung beetles lay their eggs and raise their young.
𝑈𝑏
′
= 𝑚𝑖𝑛( 𝑋
′
×(1+𝑅), 𝑈𝑏
𝐿𝑏
′
= 𝑚𝑎𝑥( 𝑋
′
×(1−𝑅), 𝐿𝑏)
𝑅=1−
(3)
Among them,
Ub
′
,
L
b
′
is the upper and lower
bounds of the spawning region,
Ub
,
L
b
is the upper
and lower bounds of the search space, respectively,
X
′
is the optimal positions of the current population,
R is the dynamic selection factor, and
max
T is the
optimal iteration order.
Once the female has identified the area where
she will lay her eggs, she will incubate the ball and
only produce one egg per iteration, thus, the position
of the oocyte changes dynamically with the iteration
of the spawning area, it is defined as follows:
1
12
()
tt
ii
BXbBLbb
+
′′
=+× − +
(4)
Where,
t
i
B
is the position of the i oosphere at
the t iteration,
1
b ,
2
b are the independent random
variable of D for the optimization problem.
Foraging behavior after hatching, young dung
beetles need to be guided to a limited optimal
foraging area. The boundary of the optimal foraging
area is defined as follows:
min( (1 ), )
max( (1 ), )
Ub X R Ub
Lb X R Lb
′′ ′′
=×+
′′ ′′
=×−
(5)
For
X
′′
is the global optimal position,
Ub
′′
,
L
b
′′
is the upper and lower limits of the optimal
foraging, the position of the small dung beetle can
be defined after the location update as shown:
1
12
()()
tt t t
ii i i
x
xC xLb C xUb
+
′′ ′′
=+× − +× − (6)
Where,
t
i
x
is the position information of the i
little dung beetle in the iteration of the t generation,
1
C is a random number following normal
distribution, and
2
C is a random vector of (0,1).
Some dung beetles don't want to play their own
game, they want to play for free, the best place in the
world, the best place to eat. Assuming that the
thieving dung beetles are competing for food nearby,
during the iteration, the thieving dung beetle
position updates as follows:
1
()
ttt
iii
x
XSgxX xX
+
′′ ′ ′′
=+××−+−
(7)
Where
t
i
x
is the position information of the i
thief dung beetle in the t generation iteration, g is a
random variable of size 1*D with a normal
distribution and S represents a constant.
2.2 Chaotic Algorithm
In order to improve the diversity of population
initialization, chaotic maps are used to generate the
diversity of initial population in the initialization
stage of DBO, the probability of the middle value of
the Logistic map is uniform, but the probability of
the two ends is very high, so it is disadvantageous to
find the global optimal point when it is not at the
two ends of the design variable space Secondly, Tent
map has good ergodicity, but there are small periods
and unstable period points in its iterative sequence,
so if the sequence falls into it, the sequence tends to
be stable and the algorithm is invalid Because
Bernoulli mapping can affect the whole process of
algorithm and obtain better optimization results, it
has the characteristics of ergodic uniformity and
moderate convergence speed, and is widely used in
algorithm initialization. Therefore, Bernoulli map is
used to initialize the population of DBO in order to
improve the distribution quality of the initial
population in the search space and enhance its global
search ability. Bernoulli was used to map the initial
position of dung beetle, the resulting values were
DMEIS 2024 - The International Conference on Data Mining, E-Learning, and Information Systems
32

projected into the chaotic variable space, and then
the resulting chaotic values were mapped into the
algorithm initial space by linear transformation, the
specific formula for the Bernoulli mapping is shown:
𝑍
=
,0≤𝑍
≤1 −𝛽
()
,1−𝛽≤𝑍
≤1
(8)
Where
β
is the mapping parameter.
2.3 BDBO-TCN
BDBO-TCN algorithm based on time convolution
network can extract the temporal characteristics of
traffic flow across time steps. TCN model is chosen
as traffic flow prediction model, which has simple
structure and can accurately capture and predict the
inherent patterns and trends of sequence data. In this
paper, the DBO algorithm based on Bernoulli map is
used to optimize the TCN parameters, taking the
time series of traffic flow as input and the prediction
error as the fitness, the next stage of traffic flow
forecast is the output matrix. An improved DBO-
TCN prediction model is convolutional neural
network as follows:
(1) firstly, the structure of TCN model is
determined, the model structure diagram for this
article is shown in Figure 2.2. 3, and then randomly
initialize the parameters of the TCN model.
(2) The initial population of DBO (suppose
rolling ball dung beetle: foraging dung beetle:
breeding dung beetle: larceny dung beetle: 20% :
20%: 25%: 35%) , and the initial value is determined
by chaos mapping method.
(3) in this paper, the prediction error of TCN
model is taken as the fitness function of dung beetle
algorithm, so that the dung beetle algorithm is
related to TCN model.
(4) using the strategy of dung beetle algorithm
introduced in Section 4.2, we get the updated value
of super-parameter, and train the TCN model on the
training set, and get the prediction error of the
model. (5) if the current prediction error meets the
set requirements or reaches the upper limit of the
cycle, the optimal TCN superparameter is obtained.
(6) if the end condition of step (5) is not
satisfied, return to step (4) to continue until the loop
end condition of step (5) is satisfied.
A summary of the above steps results in an
improved DBO-TCN traffic flow prediction
flowchart as shown in Figure 1.
3 EXPERIMENTAL ANALYSIS
3.1 Data Description
In order to verify the superiority of the proposed
model. Experiments were performed using two real-
time California highway datasets PEMSD4 and
PEMSD8 collected every 30 seconds by the Caltrans
Performance Measurement System. This paper
chooses the traffic flow data as the research object.
Traffic flow data are collected every 5 minutes. The
specific dataset statistics are shown in Table 1
Table 1: Description of experience dataset.
Datasets Number of
sensors
Edges
Time
ste
p
s
Time
ran
g
e
PEMSD4 307 340 16992 1/1/2018-
2/28/2018
PEMSD8 170 277 17856 7/1/2016-
8/31/2016
The data sets are divided into training set,
verification set and test set according to the ratio of
6:2:2. And early stop method is used to prevent
over-fitting. In order to eliminate the influence of
different variables on the data set, the maximum-
minimum normalization method is used to process
the data in [0, 1] interval. The normalization
operation is as follows:
min
max min
xx
x
x
x
−
′
=
−
(9)
where
x
′
is the normalized data,
x
is the original
data,
min
x
is the minimum value in the data sample,
and
max
x
is the maximum value in the data sample.
3.2 Experimental Environment and
Parameter Settings
This experiment is compiled and run on Windows
Server (CPU: Intel (R) Core (TM) i5-8300H CPU @
2.30 GHz, GPU: NVIDIA GeForce GTX 1050 Ti)
using PyTorch depth framework to complete in
Pycharm development environment. The specific
parameters are set as follows: Historical traffic flow
window size is 6,num_channels= [128,64,32,16,4,1]
in TCN, The loss function is MSELoss, Adam
Optimizer, Batch size=64, epoch = 100, learned
number =0.001, deflection coefficient k is 0.1, the
natural coefficient b is 0.5,number of iterations is
100 and use the early stop method with patience =
10.
Traffic Flow Prediction Model Based on BDBO-TCN
33
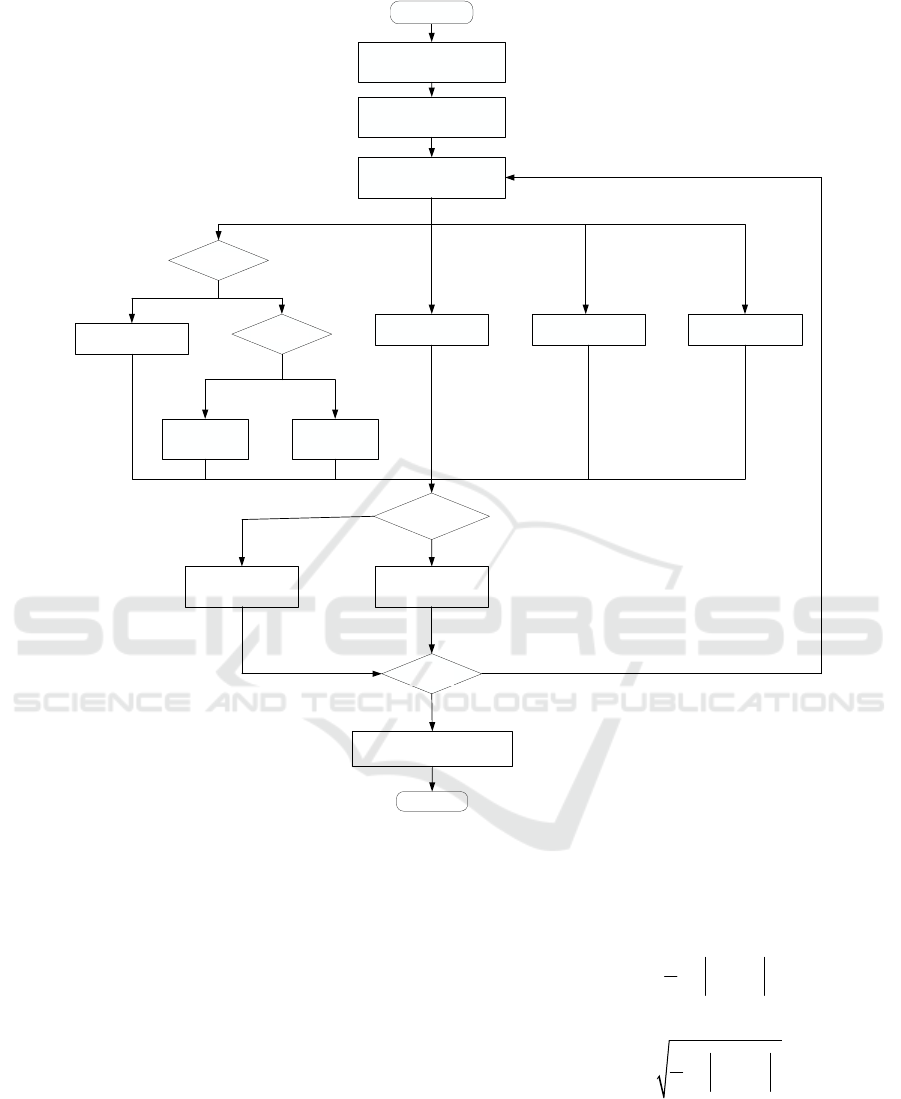
Chaos mapping initializes dung
beetle location
Calculate the fitness value for
each dung beetle
Determine the α and
update t he location
The location is not
updated
Dancing behavior,
updating the
position
Breeding behavior,
updating the position
Foraging behavior,
updating location
Stealing, updating the
location
Start
0.9
λ
<
0, / 2,
θππ
=
Y
Y
Y
N
N
Enter the target function and
related parameters
The new location is better
than the original location
The original position
remains the same
The new location
replaces the original
location
The optimal position and optimal
fitness values are output
End
max
tT<
Y
N
N
Figure 1: Traffic flow prediction flow chart of BDBO-TCN.
•Baseline Methods
(1) TCN: Time convolutional network
(2) DBO-TCN: Dung Beetle algorithm optimizes
TCN
(3) TDBO-TCN: The dung Beetle algorithm under
Tent mapping optimizes TCN
(4) LDBO-TCN: The dung Beetle algorithm under
Logistic mapping optimizes TCN
(5) BDBO-TCN: The dung Beetle algorithm
under Bernoulli mapping optimizes TCN
3.2 Evaluation Index
In order to quantitatively analyze the effectiveness
of the model for data repair, this paper uses the
complete traffic volume to verify it, and adopts the
following evaluation indexes to measure the
prediction and repair ability of the model.
(1)
Mean Absolute Error (MAE):
1
1
n
ii
i
M
AE y y
n
=
′
−
= (10)
(2)
Root Mean Square Error (RMSE):
2
1
1
n
ii
i
RMSE y y
n
=
′
−
=
(11)
Where n is the number of true data,
i
y is the true
value of the i-th true data, and
i
y
′
is the predicted
value of the ith data. The smaller the above
evaluation index, the better the prediction and repair
ability of the model.
DMEIS 2024 - The International Conference on Data Mining, E-Learning, and Information Systems
34
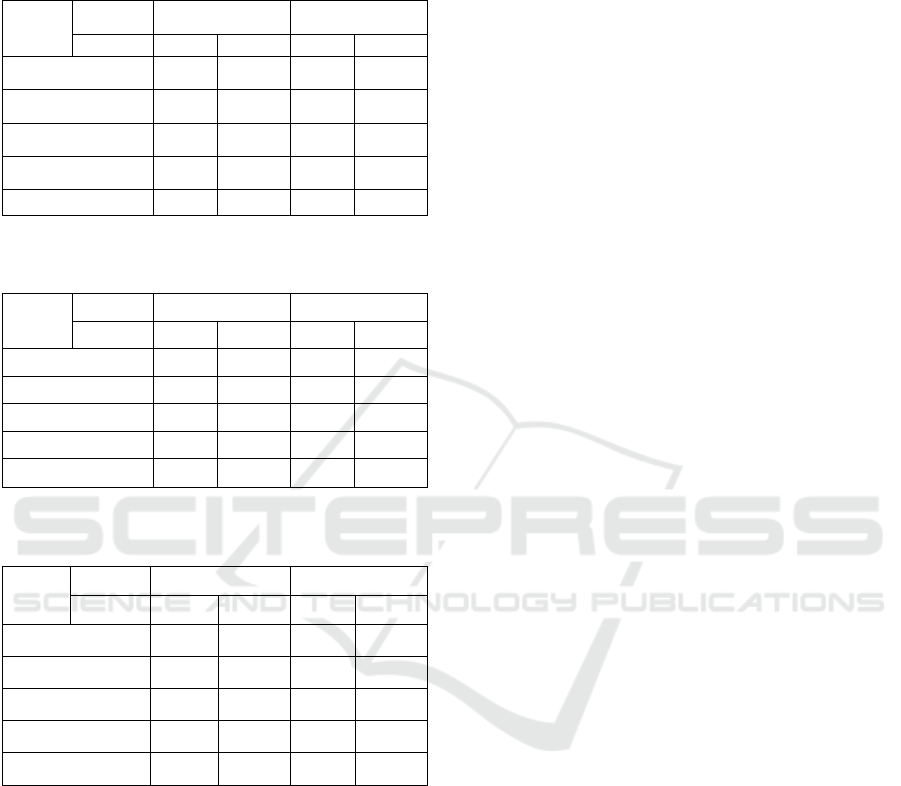
4 RESULTS
Table 2: Short-term traffic flow forecast with 5-minute
interval.
model
datasets PEMSD4 PEMSD8
Metrics MAE RMSE MAE RMSE
TCN
17.94 28.68 13.87 21.43
DBO-TCN
15.88 26.36 12.25 19.57
TDBO-TCN
15.36 25.88 11.94 19.23
LDBO-TCN
15.48 25.62 11.83 19.32
BDBO-TCN
15.21 25.23 11.73 18.72
Table 3: Short-term traffic flow forecast with 10-minute
interval.
model
datasets PEMSD4 PEMSD8
Metrics MAE RMSE MAE RMSE
TCN
18.96 30.32 14.97 23.26
DBO-TCN
17.62 28.29 13.69 21.62
TDBO-TCN
17.35 27.63 13.45 20.98
LDBO-TCN
17.22 27.52 13.48 21.06
BDBO-TCN
17.02 27.31 13.22 20.85
Table 4: Short-term traffic flow forecast with 15-minute
interval.
model
datasets PEMSD4 PEMSD8
Metrics MAE RMSE MAE RMSE
TCN
20.25 32.21
16.23 25.42
DBO-TCN
18.87 30.14
14.95 23.61
TDBO-TCN
18.68 29.56
14.85 23.32
LDBO-TCN
18.54
29.75 14.77 23.18
BDBO-TCN
18.33
29.26 14.51 22.88
As can be found in the table, the accuracy of the
model increases with the increase of the forecast
time interval, because there are many factors
affecting the traffic flow, when the number of
forecast steps increases, the correlation between the
data decreases, the performance of traffic flow
prediction is reduced, and it can be found that the
optimization algorithm can improve the accuracy of
the model, but the chaos mapping algorithm has
little influence on the optimization algorithm.
5 CONCLUSIONS
In this paper, a traffic flow prediction model of
BDBO-TCN is proposed. The parameters of TCN
(Temporal Convolutional Network) model were
optimized by using the improved dung beetle
algorithm, and the fitness objective was to minimize
the predicted RMSE (root mean square error) value,
thus, the model parameter configuration with the
highest precision and efficiency can be found. In
order to verify the performance of the model,
experiments were carried out on PEMSD4 and
PEMSD8 data sets, and the results were compared
with the TCN model under other optimization
algorithms. The experimental results show that
BDBO-TCN model performs well in traffic flow
prediction and is superior to other parameter
optimization models. With the increase of time
interval, the model can still maintain a high
prediction accuracy. In addition, we also study the
effect of different chaotic algorithms and different
synchronization lengths on the prediction accuracy,
and find that the selection of hyperparameters has an
important effect on the model performance,
moreover, it is a challenging task to determine the
optimal hyperparameters. By combining the
improved dung beetle algorithm with TCN model,
the parameters are optimized with high precision and
high efficiency. The model shows good adaptability
in dealing with time interval variation.
ACKNOWLEDGEMENTS
This work was supported by National Natural
Science Foundation of China (Grant No 62162040);
Key Program of the Natural Science Foundation of
Gansu Province, China (Grant No.22JR5RA226);
Gansu Province Higher Education Innovation Fund-
funded Project(Grant No.2021A-028)
REFERENCES
Goldberg, D. E. 1989. Genetic Algorithm in Search,
Optimization, and Machine Learning, Genetic
Algorithms in Search Optimization and Machine
Learning. https://xueshu.baidu.com/usercenter/paper
/show?paperid=f8fbd5f000b3e0591fdb69866df614a&
site=xueshu_se&hitarticle=1
Kennedy, J. & Eberhart, R.1995. Particle Swarm
Optimization. Icnn95-international Conference on
Neural Networks. DOI:10.1109/ICNN.1995.488968.
Traffic Flow Prediction Model Based on BDBO-TCN
35

Lea, C., Flynn, M. D., Vidal, R., Reiter, A. & Hager, G.
D.2016. Temporal convolutional networks for action
segmentation and detection. Proceedings of the IEEE
Conference on Computer Vision and Pattern
Recognition. 156-165. DOI:10.1109/CVPR.2017.113.
Ma, X. L., Tao, Z. M., Wang, Y. H., Yu, H. Y. & Wang,
Y. P. 2015. Long short-term memory neural network
for traffic speed prediction using remote microwave
sensor data. Transportation Research Part C-Emerging
Technologies, 54, 187-197. DOI:10.1016/j.trc.
2015.03.014
Saito, A. & Yamaguchi, A. 2016. Pseudorandom number
generation using chaotic true orbits of the Bernoulli
map. Chaos, 26. DOI:10.1063/1.4954023
Wu, Y., Tan, H., Qin, L., Ran, B. & Jiang, Z. 2018. A
hybrid deep learning based traffic flow prediction
method and its understanding. Transportation
Research Part C: Emerging Technologies, 90, 166-
180. DOI:https://doi.org/10.1016/j.trc.2018.03.001
Xue, J. K. & Shen, B. 2023. Dung beetle optimizer: a new
meta-heuristic algorithm for global optimization.
Journal of Supercomputing, 79, 7305-7336.
DOI:10.1007/s11227-022-04959-6
Yu, Y., Gao, S., Cheng, S., Wang, Y. R., Song, S. Y. &
Yuan, F. 2018. CBSO: a memetic brain storm
optimization with chaotic local search. Memetic
Computing, 10. DOI:10.1007/s12293-017-0247-0
Zhang, K. & Liang, L. 2012. Chaotic System
Identification Based on BP Neural Network of Two
Order Particle Swarm Optimization. Computer
Systems & Applications. https://kns.cnki.net/kcms2
/article/abstract?v=0Q9DRdE4I9fZuncGRxPpCpozzL
y2qVIvjjfIjlS52HGwxr6HAsrCuSM27Z_Tnxqgl6g9pI
txFdL1g-OHf99HNoagiyvfYPO8LduczZrltUEFDHEt
aAEEXcThQBDktU6C74CTGfCZiOg=&uniplatform
=NZKPT&language=CHS
Zhao, X. 2012. Research on optimization performance
comparison of different one-dimensional chaotic
maps. Application Research of Computers, 29, 913-
915. DOI:10.3969/j.issn.1001-3695.2012.03.031
DMEIS 2024 - The International Conference on Data Mining, E-Learning, and Information Systems
36
