
Fault Diagnosis of Process Systems based on Graph Neural Network
Wentao Ouyang
1
and Yang Jin
2
1
Civil Aviation of China University, Tianjin, China
2
Civil Aviation of China University, Tianjin, China
Keywords: GNNs, Process System, Fault Diagnosis, Correlation of Unit.
Abstract: The fault diagnosis methods for process systems are generally based on rules and experience, which
struggle with complex and uncertain issues. Therefore, In this study, a fault diagnosis method for process
systems using adaptive Graph Neural Networks (GNNs) is proposed. This method effectively utilizes the
correlations and dynamic changing among sensors, constructing a graph structure that reflects the complex
relationships between sensors. By employing the graph convolutional neural network as the model
foundation, it effectively extracts the primary changing features of faults, thereby addressing the problem of
multi-class fault diagnosis. Comparative experiments were conducted using the fault diagnosis task of a
three-phase flow system. The proposed method outperforms traditional models in terms of accuracy,
precision, recall, and F1 score, demonstrating its effectiveness in fault diagnosis of process industrial
systems.
1 INTRODUCTION
Process systems are complex systems that include
various devices and subsystems. These devices are
interconnected during operation, and a failure in any
one device can affect the performance of the entire
system. Therefore, fault diagnosis of process
systems is of utmost importance. Traditional fault
diagnosis methods often only consider the
performance of individual devices, neglecting the
correlations between devices, which limits the
accuracy and efficiency of fault diagnosis. In
traditional control systems, all analysis and control
strategy designs are based on the premise that the
characteristics of the process system remain
unchanged, and all sensors, actuators, and signal
transmission channels are functioning normally. A
fault in any unit of the system can affect the normal
operation and safe production of the system. Faults
or failures in any part of the process control system
can pose threats to property and personnel safety,
causing immeasurable losses and even potentially
leading to major accidents (Ma et al., 2019).With the
development of modern process systems towards
greater complexity, the likelihood of system failures
increases, along with the economic losses and
potential harms caused by system failures, such as
casualties, property damage, and environmental
pollution. Therefore, timely understanding of the
operating state of process systems, effective
anomaly monitoring, and fault diagnosis to take
appropriate control strategies in response to
anomalies or faults are crucial for ensuring the
quality and safe operation of process systems,
reducing operating costs, and are of great
significance for the production efficiency of process
systems. Real-time monitoring of the operational
state of process systems, especially for the detection,
diagnosis, and elimination of faults, is necessary to
ensure the reliability and safety of actual systems.
This requires the establishment of a process
monitoring system to monitor the operational state
of the entire control system in real-time, detect
changes in the system, and read fault information
promptly to take effective preventive measures,
ensuring the safety of process systems and
preventing catastrophic accidents. Constructing a
reliable and stable equipment process supervision
system has become a priority in mechanical
equipment manufacturing, effectively reducing
maintenance costs while ensuring the safety of
industrial machinery equipment. Currently, most
industrial equipment detection systems rely on
multiple sensor data for monitoring, such as aircraft
engines, rotating machinery rolling bearings,
multiphase flow separators, etc., while these
Ouyang, W. and Jin, Y.
Fault Diagnosis of Process Systems Based on Graph Neural Network.
DOI: 10.5220/0012876300004536
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Data Mining, E-Learning, and Information Systems (DMEIS 2024), pages 37-45
ISBN: 978-989-758-715-3
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
37

monitoring systems usually store historical data for
training. For complex industrial mechanical systems,
multi-sensor data often have high-dimensional and
complex interaction characteristics (Jiang and Yin,
2018), posing many challenges to traditional fault
diagnosis and health monitoring systems, making
supervised machine learning methods feasible.
Traditional fault diagnosis methods often focus
on Statistical Process Control (Yu and Wang, 2005)
(SPC) and model-based approaches (Wang and
Wang, 2006, 2009). Nowadays, fault diagnosis in
complex industrial systems is categorized into two
main types: model-based and data-driven methods.
Due to the complexity and high cost of modeling in
industrial systems, model-based methods are severely
limited in practical applications. In contrast, data-
driven methods, aiming to extract relevant data
features and identify fault types through statistical
analysis or feature discrimination learning, have been
widely applied and rapidly developed. Common fault
diagnosis techniques include Support Vector
Machines(Mahadevan and Shah, 2009), (SVM),
Multilayer Perceptrons (MLP), Convolutional Neural
Networks, and Graph Neural Networks. Gu (Gu et
al., 2014) employed a method combining Principal
Component Analysis (PCA) and Support Vector
Machine (SVM) to extract and analyze the fault
features of rolling bearings. However, real-world
data often contain noise and may be excessively large,
which can affect the effectiveness of this diagnostic
method. Wang(Wang et al., 2005) and others
conducted fault diagnosis on mixed circuits using
Multilayer Perceptrons (MLPs) to solve complex
classification problems. MLPs address the issue of
non-linearity between features, but when facing
process fault diagnosis, the prevalence of clear fault
data scarcity can lead to overfitting or obtaining local
optimum solutions. Additionally, there is a lack of
model interpretability. Convolutional Neural
Networks (CNNs) have also gradually become
widely applied. Chen (Chen and Yu, 2020) used
CNNs for feature learning and fault diagnosis in
multivariable processes. However, small datasets
cannot support the training of deep networks, and for
signals transmitted by mechanical or semiconductor
components, which are mostly converted into image
signals for convolutional training, this approach fails
to capture the correlations between multiple
components.
To address these challenges, this article proposes
a fault diagnosis method for process systems based
on adaptive Graph Neural Networks (GNNs).
Recently, GNNs have been widely applied in the
field of deep learning with significant success. Gori
(Gori et al., 2005) first introduced GNNs, designed
to directly process graph structures, including
directed/undirected graphs, cyclic graphs, and
labeled graphs. Due to their ability to accurately
represent real-world systems, GNN-based fault
diagnosis methods have potential advantages in
processing complex mechanical industrial data,
especially in mining the topological structures and
interactions between sensor data. Wu (Wu et al.,
2020) proposed a scalable graph convolution that
enables semi-supervised learning with graph-
structured data through the combined action of
GNNs and Convolutional Neural Networks.
The application of fault diagnosis of process
system to graph neural network has gradually
become a trend. It handles complex relationships,
automatically learns fault features and works for
large industrial systems; and performs end-to-end
training; handles dynamic graphs and multimodal
fusion, etc. for instance Li
(Li et al., 2020) by
comparing the disadvantages of other deep learning
networks to show the relationship between mining
signals, we propose a multiple receptive field graph
convolutional network (MRF-GCN) based on the
original model to effectively carry out data
relationship mining. Yang(Yang et al., 2021) this
paper proposes a method based on the space-time
graph, SuperGraph, which can transform the graph
classification task into classifying the nodes in
SuperGraph. Zhang (Yu et al., 2021) A fast graph
convolution network is proposed, using the method
of wavelet decomposition to preprocess the original
vibration signal of wind power gearbox to show the
time-frequency characteristics in the form of graph,
using the fast graph convolution kernel and specific
pooling improvement to reduce the number of nodes
and realize fast classification. Stewart E
(Ding et al.,
2020) The deep graph convolution network (DGCN)
based on graph theory is applied to the fault
diagnosis of roller bearings. This method uses the
graph structure constructed to detect the failure of
roller bearings of different types and severity of the
same type. Kenning (Kenning et al., 2022) The
directed graph convolutional neural network
(DGCNN) is proposed, and a simple method to
alleviate the inherent class imbalance in the graph is
described. Zhang (Tong et al., 2021) This paper
proposes a transmission line fault detection and
classification method based on graph convolution
neural network, and establishes a transient fault
detection and classification framework based on the
idea of prior knowledge. It is not difficult to see that
the fusion of data information is crucial for
industrial process fault diagnosis (Tang et al., 2021).
DMEIS 2024 - The International Conference on Data Mining, E-Learning, and Information Systems
38

For the identification and classification of faults, we
need to extend them to the graph level classification
level. When constructing the graph level
classification model, the corresponding graph
topology for each fault to form graph level
differentiation. At the same time, in order to retain
the graph structure characteristics, it is necessary to
effectively fuse the multi-sensor data information to
ensure the accuracy and comprehensiveness of fault
identification.
This paper aims to elaborate an innovative
method for process system in mechanical industry.
This method is based on the graph neural network,
and its core advantage is that it can deeply mine the
topology structure and mutual influence information
in the multi-sensor data, so as to improve the
detection and diagnosis accuracy of system faults.
First, this paper transforms the one-dimensional time-
domain sensor data into graph structure data, where
the nodes represent the measurements of each sensor
and the edges represent the intercorrelation between
the sensors. After the adaptive node importance
screening, a graph neural network model was
constructed. Through the model, hidden information
about the fault features and topology in multi-scale
sensor data.
2 MODELING
2.1 Relevance and Centrality Filtering
Fault diagnosis in process systems is a complex
issue involving many variables and potential
problems. It often overlooks the linear or nonlinear
relationships between devices. Graph Neural
Networks (GNNs) address this by modeling the
interactions between devices (variables) in the
system, thereby offering a better solution.
There is graph G (V, E), V is a collection of
nodes and E is used to represent the connection
between nodes. In statistics, Pearson cross-relations
(Dominic. Edelmann et al., 2021) (Pearson
Correlation Coefficient) It can be used to reflect the
degree of linear correlation between two random
temporal variables. With this point, this paper tries
to measure the correlation relationship between
nodes and construct graph data. The Pearson's
correlation coefficient is as follows:
𝑟 =
∑
(𝑋
−𝑋
)(𝑌
−𝑌
)
∑
(𝑋
−𝑋
)
∑
(𝑌
−𝑌
)
(1)
The larger the value is, the stronger the
correlation between the two nodes is, which solves
the linear relationship between the device variables.
r
The Pearson correlation coefficient is used to
calculate the linear relationship between nodes, and
then the threshold Q is set to restrict, thus further
obtaining a streamlined graph data structure,
reducing the redundancy of data calculation, and
enhancing the efficiency of data feature extraction.
𝑟
=
0 ⋯⋯𝑟< 𝑄
1 ⋯⋯𝑟≥
𝑄
(2)
When the Pearson correlation coefficient
between any nodes in the graph structure is greater
than or equal to the threshold value, it is concluded
that the two nodes are mutually first-order
neighbors, and otherwise, the connection
relationship cannot be constructed.
For each node feature vector v
i
The eigenvector
centrality of node i is obtained, and the eigenvector
centrality score for all nodes is finally calculated and
normalized. Through the variant sigmoid function,
the final node importance vector is multiplied as the
node weight value by the graph adjacency matrix
from the initial calculation, to obtain the final graph
structure matrix, thus forming M fault sample maps.
Eigenvector centrality involves finding the
principal eigenvector of the adjacency matrix (i. e.,
the eigenvector associated with the maximum
eigenvalue). Suppose that λ is the maximum
eigenvalue of the adjacency matrix A, and x is the
corresponding eigenvector. Then, x satisfies the
following characteristic equation:
xAx
λ
=
(3)
Each element x in the feature vector x
i
Denotes
the eigenvector centrality score of the corresponding
nodes. Usually, we standardize x:
)))((
)(((
βxnormalizesigmoid
βxnormalizesigmoidAA
j
iji,ji,
,
),,min×=
′
(4)
2.2 Dataset of Graph
The graph dataset consists of n small graphs, denoted
as G = {G1, G2, G3, G4, …, Gn}, where each graph
Gi = (Xi, Vi, Ei, Yi). Here,𝑋
∈(𝑛
× 𝑚) denote the
input feature matrix of the nodes, with n
i
being the
number of nodes in the i-th graph (in this paper, aside
from the normal state graph data and the sixth fault
graph data which have 24 nodes, all other graph data
consist of 23 nodes), and m being the number of
features per node. V
i
is the set of nodes, E
i
represents
the connections between nodes (including the
adjacency matrix𝐴
∈ℜ
×
), and Y
i
denotes the
Fault Diagnosis of Process Systems Based on Graph Neural Network
39

one-hot encoded value of the i-th graph. In the graph
convolutional layer, the input matrix for the k-th
layer is denoted
𝐻
∈ℝ
×
, where (𝑛
, 𝑑
)
represents the number and dimension of node
embeddings in the k-th hidden layer, with the
adjacency matrix being denoted
k
i
A
. accordingly.
Following each graph convolutional layer is a graph
average pooling layer, which calculates the feature
vector for each node to obtain a global
representation, with the value on each dimension
being the average of the features of all nodes on that
dimension. After passing through k-layers of
convolutional and pooling layers, the output enters a
fully connected layer and an Activation Function
ReLU to produce the final output. The scores for
each category are calculated using a Softmax
function to obtain the model's predicted labels, which
are then compared with the true labels. At the same
time, a loss function (such as the CrossEntropy Loss
function) is used to measure the performance of this
graph-level classification model, and gradient
Backward is performed. This process iteratively
trains the model for effectiveness and stability.
2.3 Graph Neural Network Based on
the Weighted Graph under the
Correlation
This section is mainly carried out on the
improvement of graph data operation, so that the
graph convolutional neural network model is easier
to extract the feature structure and make more
accurate prediction.
In the face of non-European data, according to the
graph node information and the data model of the
original connection correlation calculation to get the
new graph adjacent matrix, the method, while
retaining the key connection information of the
original model missing connection due to noise or
other reasons, and solve the interference of the
artificial design figure structure, reduce manpower
and reduce labor cost.
Table 1 for the graph convolutional neural
network model input and output parameter
dimensions, after the original data calculation
correlation can get the graph connection under
different fault mode, and for each sensor data change
adaptive central screening to realize multiple
weighted graph data set, improve the accuracy and
stability of GCN (Graph Convolution Networks) in
data-driven fault diagnosis.
Table 1: Input-output dimensions of each layer.
Layer Name
Input Data
Dimension
Output Data
Dimensions
Convolutional Layer M
﹡
N
﹡
F M
﹡
N
﹡
F’
Pooling Layer M
﹡
N
﹡
F’ M
﹡
N’
﹡
F’’
Full Connect Layer M
﹡
N’
﹡
F’’ M*(categories)
3 EXPERIMENTS
This section presents the performance evaluation of
fault diagnosis in mechanical industrial processes
based on Graph Convolutional Neural Networks
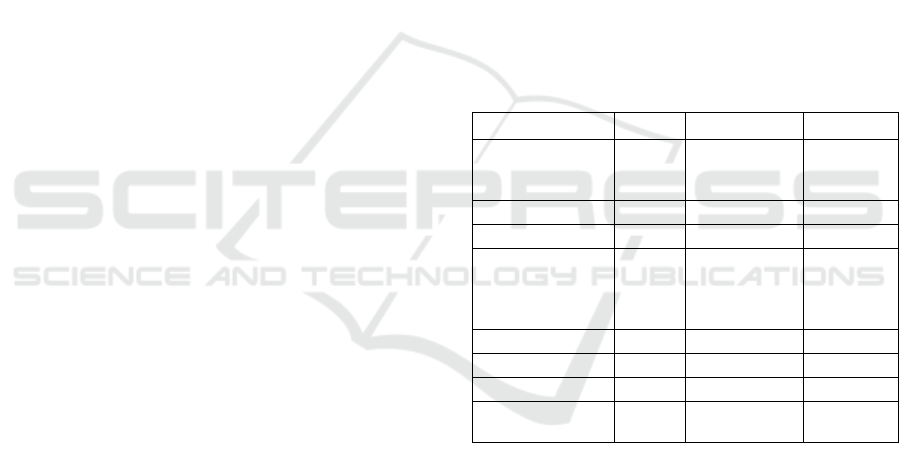
(GCN). The model structure of the method proposed
in this paper is shown in Figure 1. Experiments are
conducted using a three-phase separator dataset to
demonstrate the following points: Compared to
traditional fault diagnosis methods, the graph
convolutional neural network approach is effective
and stable in fault diagnosis of process industrial
systems.
Figure 1: Model structure graph.
3.1 Introduction to the Dataset
The data set presented in this paper uses the Three-
phase Flow Facility (TFF) data set of the University
of Cranfield (Ruiz-Cárcel et al., 2015). The
simulation encompasses the Three-phase flow
process commonly encountered in sectors such as the
oil and gas industry, involving three types of mixed
inputs/outputs: gas, liquid, and solid particles, as
illustrated in Figure 2. Within the TFF dataset, it is
possible to introduce various types of faults into the
system through specific manipulations, simulating
issues that might occur in a real plant, such as
blockages, operational errors, or unconventional
operating conditions. In experiments, the dataset is
collected under various operating conditions to
ensure that fault detection is not limited to steady-
state situations. The datasets can be used to evaluate
and compare the performance of multivariate process
monitoring techniques based on real experimental
DMEIS 2024 - The International Conference on Data Mining, E-Learning, and Information Systems
40
data. The dataset includes normal states under
steady-state working conditions and 6 types of
simulated faults (all typical faults in actual
operation), with each fault data transitioning from a
normal state to a weak fault, to a severe fault, and
back to a normal state, sampled at a frequency of
1Hz.
Figure 2: Architecture of the three-phase flow
facility(Ruiz-Cárcel et al., 2015).
In this paper, normal data value in the fault data
are removed, focusing only on the fault states, and
normalization is applied to each sensor's data.
Data normalization involves scaling input data to
a common range, thereby eliminating the impact
on model recognition caused by disparate ranges
of feature parameters. The normalization process
is represented as follows, constraining the input
parameter values within the range [0,1].
minmax
min
xx
xx
x
n
−
−
=
(5)
During the process of creating sample graphs,
every 20 data points are used to form a feature
segment to construct the sample graph.
Subsequently, the fault dataset and the normal
dataset are randomly merged, with 70% of the
combined dataset randomly selected as the
training dataset and 30% as the test dataset. Table
2 displays the fault classification and the label
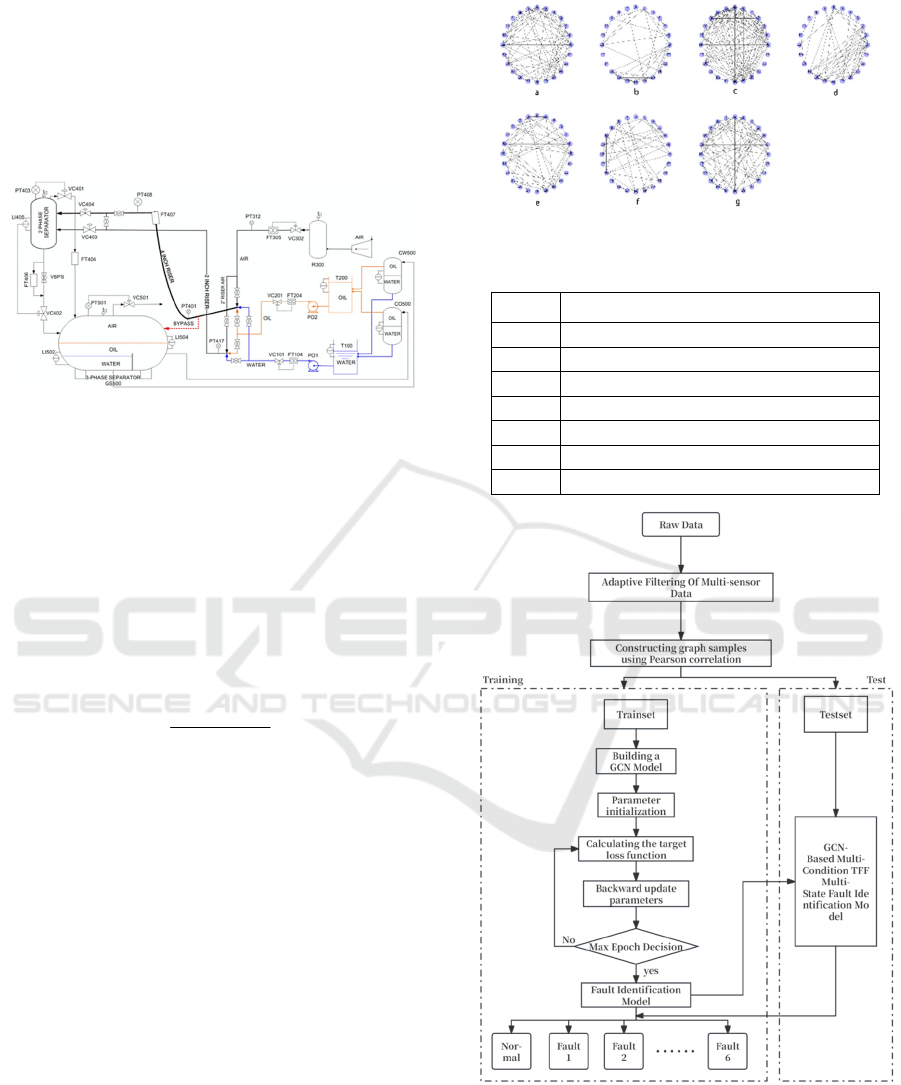
values for each state. Figure 3 shows graph-level
representations under different fault conditions,
sequentially corresponding to the faults listed
below. (a. Normal state; b. Airway blockage; c.
Water pipe blockage; d. Top separator inlet
blockage; e. Bypass valve open; f. Pressure surge;
g. System operation anomaly (manual)).
Figure 3: Display of each fault level diagram.
Table 2: Label parameters setting.
Label Fault Type
0 Normal operation
1 Gas pipe blockage
2 Water pipe blockage
3 Top separator input is blocked
4 Bypass valve open
5 Pressure surge
6 Abnormal operation (artificial)
Figure 4: Experimental step.
3.2 Setup
The experimental procedure is illustrated in
Figure 4. By utilizing different algorithms such as
PCA+SVM, MLP, CNN, and GAT (Graph
Fault Diagnosis of Process Systems Based on Graph Neural Network
41
Attention Networks) as benchmarks, the method
presented in this paper is compared against them,
evaluating the stability and effectiveness of fault
diagnosis on the aforementioned dataset through
various metrics.
This paper employs three metrics to evaluate
data-driven classification models: Accuracy
Estimation (Accuracy), Precision, Recall, and F1-
score. Accuracy is the most common evaluation
metric for classification problems, representing
the probability of correct predictions for all test
samples. Precision and Recall are often used
together as indicators to assess the performance of
classification models. Precision refers to the
accuracy of the classification model in predicting
positive samples correctly, that is, among the
samples predicted as positive, how many are truly
positive samples. Recall refers to the rate at which
the classification model correctly identifies all
true positive samples, indicating how many of the
actual positive samples were correctly recognized.
When precision is high, the model's analysis
results are more reliable, but it may miss some
true positive samples. On the other hand, when
recall is high, the model can effectively identify
all true positive samples, but it may mistakenly
classify some negative samples as positive. The
F1-score is the harmonic mean of precision and
recall, incorporating the performance of both
precision and recall, and is commonly used to
evaluate the performance of binary classification
models. The F1-score combines the model's
precision and recall, providing a single numerical
indicator to measure the model's overall
performance. Its value generally ranges from 0 to
1, with higher values indicating better model
performance.The F1-score includes three different
scores: micro-F1, macro-F1, and weighted-F1.
This paper uses the first two for calculating and
evaluating the classification models. Micro-F1
calculates the F1 score by aggregating the global
true positives (TP), false negatives (FN), and false
positives (FP). First, the true positives (TP), false
positives (FP), and false negatives (FN) values for
all categories are summed up, and then these
values are inserted into the F1 equation to obtain
the micro-F1 score. Macro-F1 calculates the
arithmetic mean of the F1 scores for each
category. This method treats all fault categories
equally without considering the importance of
differences between categories.
The experiment comprises a total of 3281
sample sets, with each set consisting of 10 data
points. The training and test sets account for 70%
and 30% of the total number of samples,
respectively, resulting in 2296 sets for the training
set and 985 sets for the test set. Each experimental
sample is represented by a matrix of size (10 ×
number of nodes) as the X input feature matrix. In
this paper, except for the normal state and fault
state with 6 nodes, which have 24 nodes each, all
other fault states consist of 23 nodes.In model
training, mini-batch training is employed with a
BatchSize of 16, and the maximum training epoch
is set to 100.The experimental method utilizes a
cross-entropy loss function and employs the
Adam optimizer along with model parameters,
with the learning rate set at 0.0005. In the graph
neural network model, two convolutional layers,
one Dropout layer (rate = 0.5), and one fully
connected layer are adopted, as shown in Table 3:
Table 3: Experimental model parameter setting.
P
arameters/Setting
s
Value Description Remarks
Learning Rate
0.0005
Using the
Adam
optimize
r
Search
through the
gri
d
Batch size 16
Epoch 100
Dropout Rate 0.5
After being
applied to the
convolution
laye
r
Reduce
overfitting
Hidden Layer Size 64
GCN Layers 3
A
ctivation Functio
n
ReLU
Early Stop
Strateg
y
yes
Based on the
validation loss
Prevent
overfitting
Moreover, the experimental method is
implemented on the basis of PyTorch Geometric,
and the experimental platform is a computer
equipped with an NVIDIA RTX3070 and an Intel
i7 10th generation CPU.
4 EXPERIMENTAL
VALIDATION
This paper tests the performance of the model by
inputting a randomly assigned test dataset into the
model trained from the training set. A qualitative
analysis of each model's fault identification
classification performance is conducted visually
DMEIS 2024 - The International Conference on Data Mining, E-Learning, and Information Systems
42
through confusion matrices, evaluating the
recognition performance for each fault category. This
analysis also identifies issues within the model in
graph classification tasks. To reduce the impact of
randomness in device computation during the
experiment, the experiment was repeated multiple
times. It was found that the results did not vary
significantly, allowing the selection of one set of
results for comparative analysis across different
algorithms. This experimental method can quickly
improve the model's classification accuracy during
the computation process, and after multiple
iterations, there is no significant fluctuation in the
loss value, indicating the model's rapidity and
stability. Table 4 assesses the performance of the
experimental method from multiple perspectives by
displaying the performance metrics of various
algorithms.
It's not difficult to see from the accuracy metric
that the model proposed in this paper significantly
outperforms traditional fault diagnosis methods and
existing popular methods, reaching up to 97%
accuracy. This is a 9.2%, 9.4%, and 15%
improvement over GAT, CNN, and MLP
respectively, and a substantial 44% improvement
compared to the traditional PCA+SVM method. In
terms of precision, recall, and F1 score, the increase
in these metrics further indicates a reduced
probability of making incorrect predictions.
Consequently, it can be intuitively judged that the
model method proposed in this paper has
improvements of 6%, 7.5%, and 9% over the CNN
method, 25%, 14%, and 20% over the MLP method,
and 5.8%, 6%, and 6% over the GAT model,
respectively. From this comparative experiment, it
can be concluded that the performance evaluation
metrics of the proposed method are the highest. This
also demonstrates that the method proposed in this
paper is effective and robust when implementing
dynamic process system fault diagnosis for different
fault classification tasks.
Table 4: Classify performance comparison of each model.
Model
Precision
(%)
Accuracy
(%)
Recall
(%)
Micro
F1
Macro
F1
P
CA+SVM 53.23 49.66 53.23 0.51 0.36
MLP 82.78 71.49 82.77 0.76 0.54
CNN 88.43 90.52 88.43 0.87 0.71
GAT 88.67 90.8 90.8 0.90 0.86
this paper 97.86 96.61 96.17 0.96 0.93
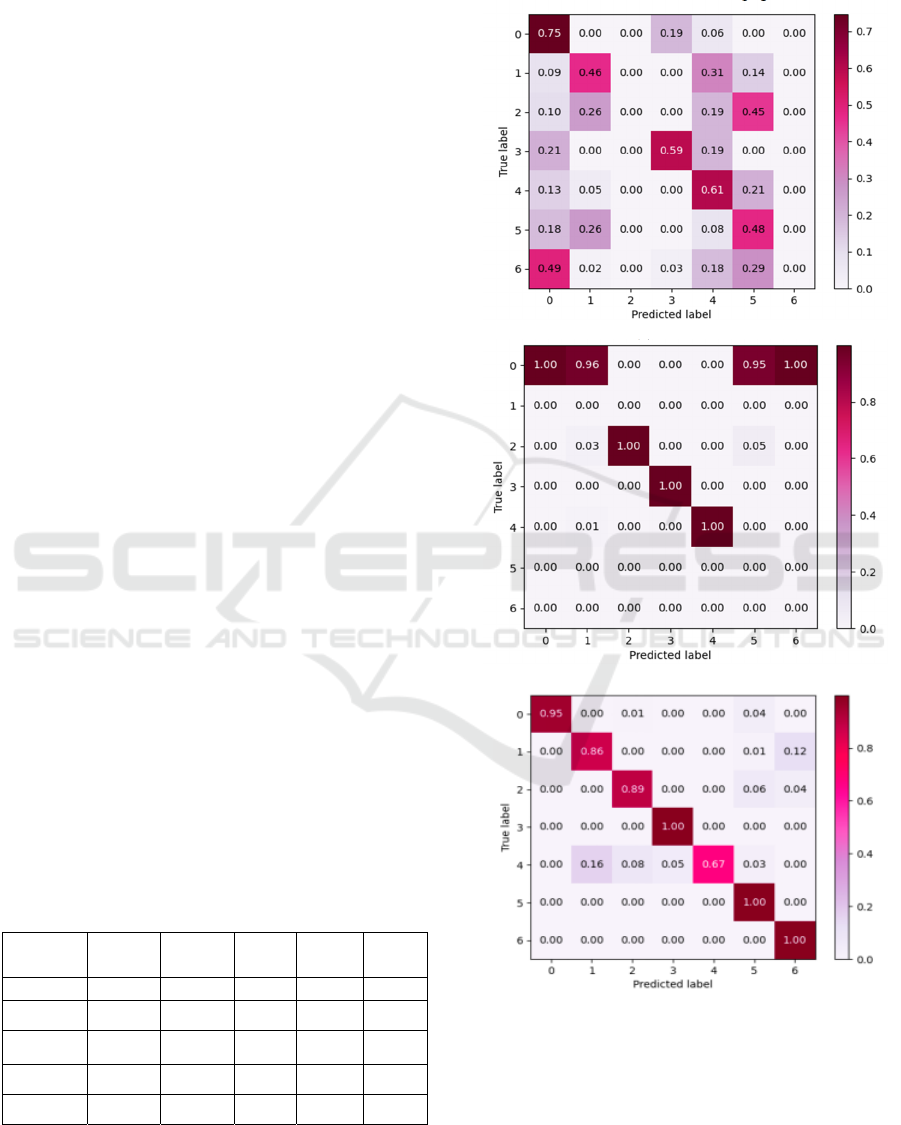
Figure 5 sequentially displays the confusion
matrix diagrams for PCA+SVM, MLP, CNN, GAT,
and the method mentioned in this paper:
(a)PCA+SVM
(b)MLP
(c)CNN
Fault Diagnosis of Process Systems Based on Graph Neural Network
43
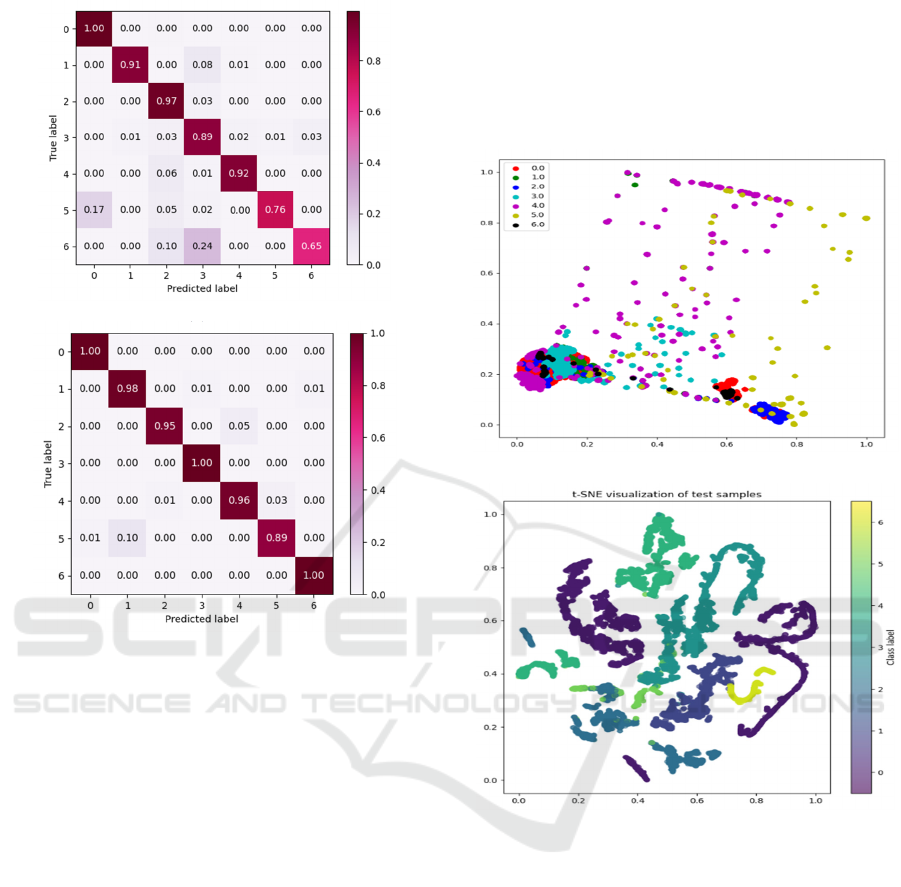
(d)GAT
(e)Methods of this paper
Figure 5: Confusion matrix diagram of each model.
In the confusion matrix, each column represents
the predicted labels, and each row represents the true
labels. The values on the main diagonal of each
model's confusion matrix represent the percentage of
samples correctly classified for each label during the
testing phase, while the off-diagonal elements
represent cases of misclassification.By comparing the
main diagonals of the five models, it is more
intuitively observed that PCA and MLP both exhibit
cases where the misidentification rate is 100%. In the
CNN model, the recognition rate for the fault of
mistakenly opening the bypass valve is relatively
low, and in the GAT model, the recognition rate for
system faults under conditions of manual
misoperation is low. The graph-structured optimized
GCN model proposed in this paper demonstrates an
accuracy rate of over 89% for the recognition of
triphasic flow data compared to other models. This
further proves the effectiveness and robustness of the
graph neural network model under graph structure
optimization for recognizing different fault
categories. It has stronger generalization capabilities
for fault recognition rates and can effectively extract
fault features.
Furthermore, this paper utilizes the t-Distributed
Stochastic Neighbor Embedding (t-SNE) method
(Van Der Maaten and Hinton, 2008) to visualize the
fault features learned by the model and the
preprocessed original data in two-dimensional feature
maps, as shown in Figures 6(a) and 6(b).
(a)Feature of Raw Data
(b)Features after model training
Figure 6: T-SNE Visualization in 2D.
It can be observed that the fault features after
model learning exhibit better clustering performance
and fault separation, effectively revealing the
inherent structure and correlations within the data.
5 CONCLUSIONS
This paper proposes a fault diagnosis method for
mechanical process industrial systems using a Graph
Convolutional Neural Network (GCN) model, which,
compared to traditional intelligent fault diagnosis
methods that heavily rely on manual feature
extraction, introduces a novel approach. The
proposed method combines multi-dimensional time-
DMEIS 2024 - The International Conference on Data Mining, E-Learning, and Information Systems
44

series data with improved graph data obtained
through correlation calculations and original graph
data, inputting them into the network model to
extract features from different fault samples, thereby
achieving fault type diagnosis. The experiments
show a significant improvement in commonly used
metrics such as Accuracy Estimation (Accuracy),
Precision, Recall, and F1-score, as well as in the
intuitive representation of confusion matrices and t-
SNE visualizations, compared to traditional
intelligent fault diagnosis methods. This
demonstrates a certain superiority, enabling the
model to fully capture and utilize the structural
information in the data, thereby further enhancing the
model's representational capability and prediction
accuracy.
In future work, based on graph data under
continuous time-series operating conditions, effective
fault features can be extracted using weighted
windows to enhance the timeliness of fault diagnosis
by graph neural network models and to predict fault
occurrence points in advance. Applying this to actual
operations can effectively reduce maintenance costs
and labor requirements.
REFERENCES
Ma L ,Dong J ,Peng K , et al, 2019.“Hierarchical
Monitoring and Root-Cause Diagnosis Framework for
Key Performance Indicator-Related Multiple Faults in
Process Industries,” IEEE Trans. Industrial
Informatics, vol. 15, no. 4, pp. 2091-2100, 2019.
Jiang. Y.,Yin. S., 2018.“Recursive total principle
component regression based fault detection and its
application to vehicular cyber-physical systems,”
IEEE Trans.Ind.Inform., vol. 14, no. 4, pp. 1415–1423.
Yu, T.,Wang, G, 2005.“The connotation and role of
statistical process control in advanced manufacturing
environments,” Industrial Engineering and
Management, no. 03, pp. 51-54.
Wang, Q.,Wang, B, 2006, 2009.“Simulation research on
model-based fault diagnosis methods,” Journal of
Hebei University of Technology, no. 04, pp. 99-104.
Mahadevan S, Shah S L.“Fault detection and diagnosis in
process data using one-class support vector machines,”
Journal of process control, 2009 vol. 19, no. 10, pp.
1627-1639.
Gu, Y.,Yang, Z.,Zhu, F. ,2014. “Fusion analysis of rolling
bearing fault characteristics based on principal
component analysis,” In: National Academic
Exchange Conference on Reliability Technology in the
Machinery Industry and Establishment Conference of
the Fifth Committee of the Reliability Engineering
Branch. ChengDu. pp. 193-197.
Wang. C., Chen. G., Xie. Y, 2005.“Application of
multilayer perceptron in fault diagnosis of analog /
hybrid circuit,” Journal of Instrumentation, no. 06, pp.
578-581.
Chen. S.,Yu. J, 2020.“Feature learning and fault diagnosis
of convolutional neural networks,” Journal of Harbin
Institute of Technology, vol. 52, no. 07, pp. 59-67.
Gori M, Monfardini G, Scarselli F. ,2005. “A new model
for learning in graph domains,” In: Proceedings IEEE
international joint conference on neural networks. vol.
2, pp. 729-734.https://10.1109/IJCNN.2005.1555942
Wu. Z., Pan. S., Chen. F., et al, 2020.“A comprehensive
survey on graph neural networks,” IEEE transactions
on neural networks and learning systems, vol. 32, no.
1, pp. 4-24.
Li. T., Zhao. Z., Sun. C., et al, 2020.“Multireceptive field
graph convolutional networks for machine fault
diagnosis,” IEEE Transactions on Industrial
Electronics, vol. 68, no. 12, pp. 12739-12749.
Yang. C., Zhou. K., Liu. J, 2021.“SuperGraph: Spatial-
temporal graph-based feature extraction for rotating
machinery diagnosis,” IEEE Transactions on
Industrial Electronics, vol. 69, no. 4, pp. 4167-4176.
Yu. X., Tang. B., Zhang. K, 2021.“Fault diagnosis of wind
turbine gearbox using a novel method of fast deep
graph convolutional networks,” IEEE Transactions on
Instrumentation and Measurement, vol. 70, pp. 1-14.
Ding. C., et al, 2020.“Intelligent acoustic-based fault
diagnosis of roller bearings using a deep graph
convolutional network,” Measurement, vol. 156, pp.
107585-107585.
Kenning. M., Deng. J., Edwards. M., et al, 2022.“A
directed graph convolutional neural network for edge-
structured signals in link-fault detection,” Pattern
Recognition Letters, vol. 153, pp. 100-106.
Tong. H., Qiu. R.,Zhang. D., et al, 2021.“Detection and
classification of transmission line transient faults
based on graph convolutional neural network,” CSEE
Journal of Power and Energy Systems, vol. 7, no. 3,
pp. 456-471.
Tang. Y., Zhang. X.,Qin. G., et al, 2021.“Graph
Cardinality Preserved Attention Network for Fault
Diagnosis of Induction Motor Under Varying Speed
and Load Condition,” IEEE Transactions on Industrial
Informatics, vol. 18, no. 6, pp. 3702-3712.
Dominic. Edelmann., et al, 2021.“On relationships
between the Pearson and the distance correlation
coefficients,” Statistics and Probability letters, vol.
169.
Ruiz-Cárcel. C.,Cao. Y.,Mba. D., et al, 2015.“Statistical
process monitoring of a multiphase flow facility,”
Control Engineering Practice, vol. 42, pp. 74–88.
Van. Der. Maaten. L.,Hinton. G., 2008.“Visualizing data
using t-sne,” Journal of machine learning research,
vol. 9, no. 11.
Fault Diagnosis of Process Systems Based on Graph Neural Network
45
