
Power Quality Monitoring Device of EMU Traction Network Based
on Zynq
Jiale Zhang
1
, Zhengwei Liu
1
, Chao Guan
1
, Dalei Ha
1
and Song Xiang
2
1
CRRC Changchun Railway Vehicles Co., Ltd, Changchun, China
2
School of Physical Science and Technology, Southwest Jiaotong University,Chengdu, China
Keywords: EMU, Power Quality, Monitoring Devices, Zynq-7000, AD9251.
Abstract: Aiming at the power quality problem of traction network during the operation of moving train sets, a traction
network power quality monitoring device is designed in the paper. The device uses the XC7Z045 chip of the
Zynq-7000 series as the main control chip, and adopts a modularized design, including the signal acquisition
module, signal processing module, data transmission module and power supply module. The signal
acquisition module designs a 1000:1 large-ratio resistor-capacitor buck circuit and a current sampling circuit
with a gain of 3.9, and realizes the high-speed synchronous acquisition of network voltage and network current
based on the AD9251 chip; the signal processing module completes the high-speed processing of data by
using the built-in FPGA+ARM dual-core architecture of the main control chip; the data transmission module
uses the Ethernet chip 88E1116R and network transformer HR682430E to construct the PAC and the data
transmission module; the signal processing module uses the Zynq-7000 series XC7Z045 chip as the main
control chip. The data transmission module uses Ethernet chip 88E1116R and network transformer
HR682430E to build PHY Gigabit network circuit, which realizes high-speed and reliable data transmission;
the power supply module is based on a variety of power management chips such as TPS54560, SY8263, and
so on, and the logic of power supply architecture according to the multi-stage conversion, which improves
the power supply reliability of the hardware circuits. After test verification, the device has stable performance
and high calculation accuracy, and the calculation error of each parameter is within 0.5%.
1 INTRODUCTION
In the 21st century, the rapid development of EMU
speed and intelligence, and inevitably accompanied
by the introduction of the corresponding high-power
and nonlinear equipment, EMU asymmetric load and
other nonlinear load capacity continues to increase,
which brings a series of problems in the traction
network system voltage and current waveform
distortion, fluctuation and flicker, which seriously
affects the power quality of the power supply
system(Weiwei Li, 2020;Jianxiong Zhang, 2022;Ke
Yin, 2020;Tao Liu, 2022). Therefore, it is urgent to
conduct data monitoring on the power quality of the
traction network during the operation of EMU, and
use the data as support to trace and solve the
problems, so as to provide guarantee for the safe
operation of EMU(Liping Zhao, 2022;Guiping Cui,
China National Railway Group Corporation Science and Technology Research and Development Program(N2022J008)
2020;Zhuo Liu, 2021;He Wang, 2021;Shuang Yan,
2020).
At present, the power quality monitoring
technology is mature in the field of power system, but
because of the complex electrical coupling process of
EMU train traction network, it is not suitable for the
technical standards of power system(Guipeng Zhang,
2023). According to the survey, a unified and
standardized standard system has not been formed in
the field of EMU. The existing power quality
monitoring device of traction network have single
function, high cost, long development cycle time, and
are mostly installed in traction substations. However,
EMU trains as traction load are ignored as the
incentive source of power quality deterioration of
traction network. Therefore, the power quality of
traction network should be monitored by monitoring
the output signals of on-board voltage and current
transformer of EMU(Yifeng Su, 2021;Qiang Li,
2021;Chengyue He, 2021;Shenggao Gong, 2020).
46
Zhang, J., Liu, Z., Guan, C., Ha, D. and Xiang, S.
Power Quality Monitoring Device of EMU Traction Network Based on Zynq.
DOI: 10.5220/0012876500004536
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Data Mining, E-Learning, and Information Systems (DMEIS 2024), pages 46-52
ISBN: 978-989-758-715-3
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
In summary, the XC7Z045 chip of Zynq-7000
series is selected as the main control chip, and a
monitoring device is built with AD9251 and other
auxiliary chips to monitor the power quality of the
traction network of the EMU by monitoring and
recording the voltage transformer, secondary voltage
of current transformer and current output signals on
the EMU. At the same time, the device adopts mature
chip products for research and development, which
has the advantages of low cost, fast development
speed, perfect function and easy expansion. This
paper introduces the design principle of power quality
monitoring device, and verifies the accuracy and
stability of the system by using standard power
source.
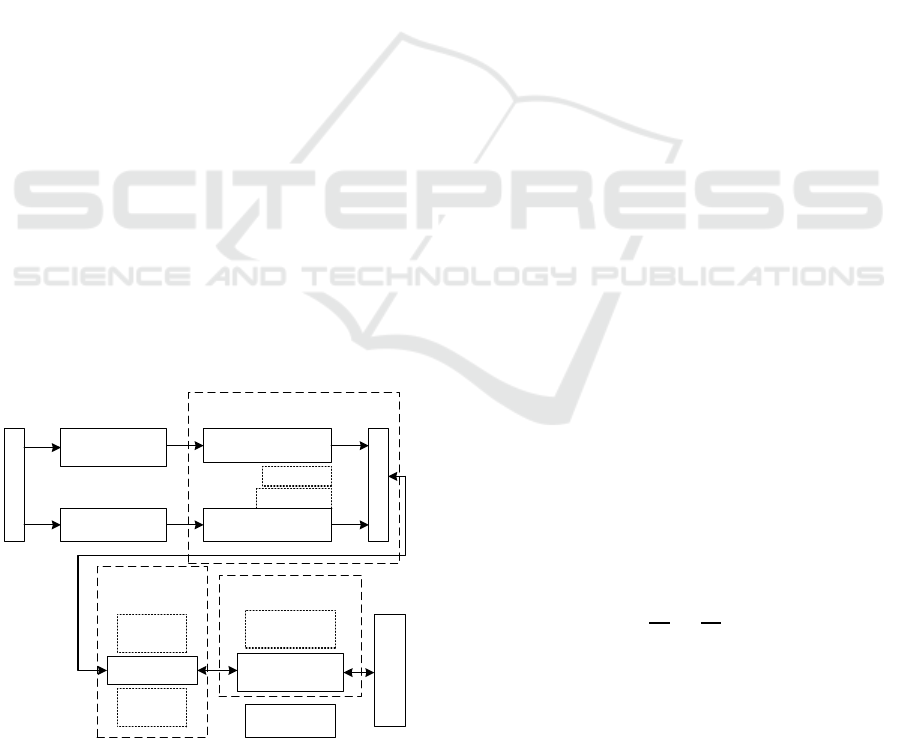
2 OVERALL DESIGN SCHEME
The overall structure block diagram of the monitoring
device is shown in Figure 1. It mainly includes the
following four modules: signal acquisition module,
signal processing module, data transmission module
and power module. The signal acquisition module
uses AD9251 analog-to-digital conversion chip to
realize high-speed synchronous signal acquisition;
Signal processing module uses dual-core ARM and
FPGA embedded in XC7Z045 main control chip to
realize high-speed data processing. The data
transmission module uses 88E1116R Ethernet chip to
construct gigabit network circuit to realize high-speed
data transmission. The power module uses the DC-
DC conversion chip and a series of voltage regulator
chips to realize the normal operation of the device.
Traction network
Voltage
transformer
Current
transformer
Voltage acquisition
channel
Current acquisition
channel
AD9251
XC7Z045
PHY Gigabit
network circuit
Upper computer
software
LMH6612
AD8138
QSPI
FLASH
88E1116R
HR682430E
Power supply
module
Signal acquisition
module
Signal processing
module
Data transmission
module
DDR3
(PL、PS)
Figure 1: System structure diagram.
3 MAIN MODULE DESIGN
3.1 Signal Acquisition Module
The signal acquisition module is designed based on
AD9251 analog-to-digital conversion chip. When the
train is running in steady state, the net voltage RMS
value is 17.5kV~31.5kV, and the voltage transformer
ratio is 250:1, so the secondary voltage RMS value is
70V~126V. Since overvoltage faults often occur
during train operation, and the peak value of
overvoltage is high, in order to ensure that the system
can withstand the overvoltage shock, the maximum
voltage input is considered to be ±1250V, thus the
voltage acquisition channel circuit design is carried
out. Moreover, the voltage input range of the AD9251
chip in the signal acquisition module is ±1V.
Considering this, a resistive-capacitive (RC) voltage
divider circuit with a turns ratio of 1000:1 is designed.
This circuit reduces the high voltage signal with a
peak value of 1250V to 1.25V. To minimize the
impact introduced by the monitoring device, the input
impedance of the monitoring device needs to be
designed to be greater than 1MΩ. In order to ensure
stable turns ratio over a wide frequency range, the RC
voltage divider circuit needs to satisfy Equation 1,
where R
1
and R
2
represent the resistances of the high
and low voltage arms, and C
1
and C
2
represent the
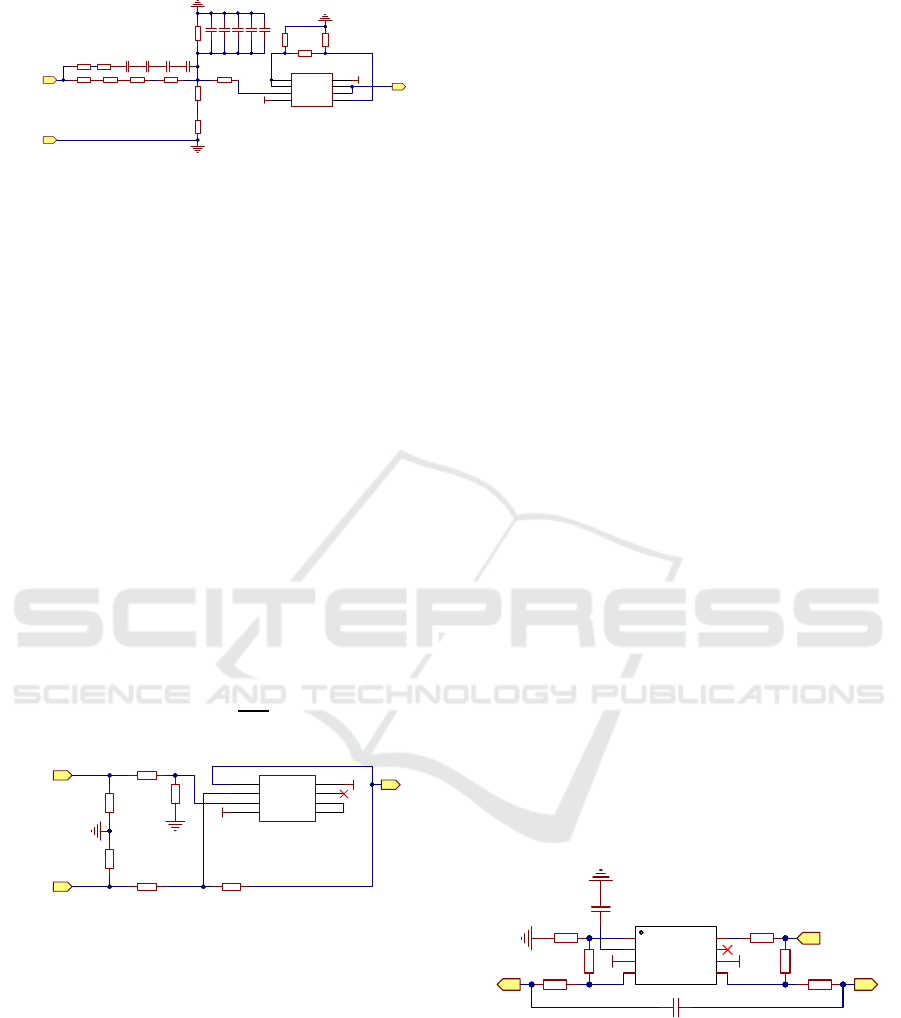
capacitances of the high and low voltage arms. As
shown in Figure 2, the high voltage arm of the voltage
divider circuit consists of four 1MΩ resistors
connected in series. The low voltage arm is
constructed by connecting a 150KΩ resistor in series
with a 5.1KΩ resistor, and then these are connected
in parallel with a 4.3KΩ resistor. This configuration
forms a 1000:1 voltage divider circuit. After the step-
down circuit is the voltage following circuit
composed of the integrated operational amplifier
model LMH6612MA, where the 100Ω and 390Ω
resistors form a voltage divider circuit, making the
circuit gain 0.796. Thus, the large voltage signal with
the maximum peak value of 1250V is converted into
a small voltage signal with the peak value of 1V after
a series of step-down processing.
ோଵ
ோଶ
=
ଶ
ଵ
(1)
Power Quality Monitoring Device of EMU Traction Network Based on Zynq
47
R1 R2 R3
R4
R5
R6
C1
C2
C3 C4
R7
R8
R9
C5 C6
C7
C8 C9
R10
R11
R12
R13
GND
GND
GND
EX_A IN_VP
EX_AIN_VN
AIN_V
OUTA
1
-INA
2
+INA
3
V-
4
V+
8
OUTB
7
-INB
6
+INB
5
LMH6612
+5
-5
Figure 2: Voltage acquisition circuit schematic.
When the train is running in steady state, the RMS
of the network current is 480A~720A, and the
transformer ratio is 600:1, so the RMS of the
secondary side current is 0.8A~1.2A. In order to
ensure that the system current acquisition has a
certain margin, the maximum current input is
considered to be ±2.5A, so the current acquisition
channel circuit is designed. As shown in Figure 3, the
current sampling resistors are two high-precision
cryobleach 0.05Ω resistors in series to convert a
±2.5A current signal into a ±0.25V voltage signal.
Then the voltage signal of ±0.25V passes through the
integrated operation amplifier of model
LMH6612MA to form a voltage amplifier circuit with
gain of 3.9, amplifies the voltage signal of ±0.25V to
a voltage signal of ±1V, and outputs it to the rear
circuit. The gain calculation formula for the current
sensing circuit shown in Figure 3 is given by Equation
2, where R
19
= 390Ω and R
18
= 100Ω. From this, we
can calculate the gain to be 3.9.
Gain =
ோଵଽ
ோଵ଼
(2)
R14
R15
R16
R17
R18 R19
GND
+5V
-5V
EX_AIN_IP
EX_AIN_IN
AIN_I
GND
OUTA
1
-INA
2
+INA
3
V-
4
V+
8
OUTB
7
-INB
6
+INB
5
LMH6612
Figure 3: Current acquisition circuit schematic.
The signal acquisition module of the monitoring
device uses AD9251 chip for signal acquisition. The
AD9251 is a single-chip, dual-channel, 14-bit ADC
acquisition chip powered by a 1.8V analog power
supply that supports differential analog signal inputs
up to 2Vpp, with high signal-to-noise ratio (SNR),
large spury-free dynamic range (SFDR), and low
power consumption. Integrated with a high-
performance sample-and-hold circuit and an on-chip
reference voltage source, the sample-and-hold circuit
can maintain stable and excellent performance at
input frequencies up to 200MHz. The chip uses a
multistage differential pipeline architecture with
integrated error correction logic to provide 14-bit
accuracy and guarantee no code loss over the entire
operating temperature range. Since the input signal is
a differential analog signal, and the output of the
acquisition channel circuit is a single-ended signal, it
is necessary to add a single-ended to differential
circuit after the acquisition channel circuit to drive the
ADC. At the same time, because the voltage and
current acquisition channels both output voltage
signals of ±1V, the single-ended to differential ADC
driving circuits of the two channels are exactly the
same. The circuit schematic diagram is shown in
Figure 4. The low-distortion differential ADC driver
AD8138 is used to complete the circuit principle
design, and the output end is connected to the signal
input port of the AD9251. This drives the ADC for
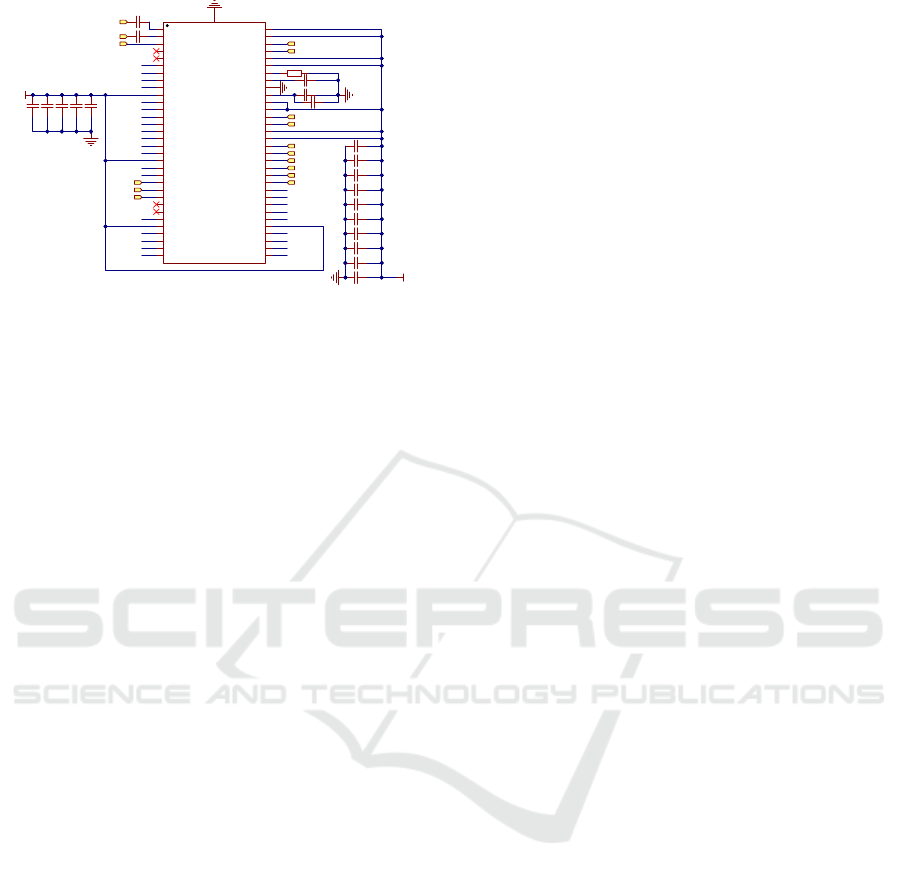
data acquisition. Figure 5 shows the schematic
diagram of the AD9521 peripheral circuit, which
mainly includes clock circuits, including external
reference clock input, clock frequency division circuit
and clock synchronization circuit. The power supply
circuit mainly includes analog power supply and
digital power supply, wherein AVDD is analog power
supply and DRVDD is digital output drive power
supply, both of which are 1.8V, in which a plurality
of 10µF large capacitors and 100nF small capacitors
are incorporated for voltage regulation filtering; The
input circuit mainly includes two differential signal
input circuits, A and B. The output end of the voltage
and current single-ended to differential circuit is
connected to the port respectively to drive the ADC
to collect voltage and current. The output circuit
mainly includes data output and clock output; The
control circuit mainly includes control SPI interface,
control register and status register, and the AD9251 is
configured and controlled through SPI interface.
R21
R20
R22
R23
R24 R25
C18
C19
GND
GND
AIN_V
V-
-IN
1
VOCM
2
V+
3
+OUT
4
-OUT
5
V-
6
NC
7
+IN
8
AD8138
+5 -5
V+
Figure 4: Single terminal to differential circuit schematic.
DMEIS 2024 - The International Conference on Data Mining, E-Learning, and Information Systems
48
CLK+
1
CLK-
2
SYNC
3
NC
4
NC
5
(LSB)D0B
6
D1B
7
D2B
8
D3B
9
DRVDD
10
D4B
11
D5B
12
D6B
13
D7B
14
D8B
15
D9B
16
D10B
17
D11B
18
DRVDD
19
D12B
20
(MSB)D13B
21
ORB
22
DCOB
23
DCOA
24
NC
25
NC
26
(LSB)D0A
27
DRVDD
28
D1A
29
D2A
30
D3A
31
D4A
32
D5A
33
D6A
34
D7A
35
D8A
36
DRVDD
37
D9A
38
D10A
39
D11A
40
D12A
41
D13A(MSB)
42
ORA
43
SDIO/DCS
44
SCLK/DFS
45
CSB
46
OEB
47
PDWN
48
AVDD
49
AVDD
50
VIN+A
51
VIN-A
52
AVDD
53
AVDD
54
VREF
55
SENSE
56
VCM
57
RBIAS
58
AVDD
59
AVDD
60
VIN-B
61
VIN+B
62
AVDD
63
AVDD
64
0
AD9251BCPZ-40
C24
C25
AD C_CLK _P
ADC_CLK_N
AD C_SYN C
ADC _DB0
ADC _DB1
ADC _DB2
ADC _DB3
AD C_DB4
AD C_DB5
AD C_DB6
AD C_DB7
AD C_DB8
AD C_DB9
ADC _DB10
ADC _DB11
ADC _DB12
ADC _DB13
AD C_ORB
C26C27C28C2 9C3 0
GND
+1.8V
AD C_DCO B
AD C_DCO A
AD C_DA 0
AD C_DA 1
AD C_DA 2
AD C_DA 3
AD C_DA 4
AD C_DA 5
AD C_DA 6
AD C_DA 7
AD C_DA 8
AD C_DA 9
AD C_DA 10
AD C_DA 11
AD C_DA 12
AD C_DA 13
ADC _ORA
AD C_SDI O
ADC _SCLK
AD C_CS B
ADC _OEB
ADC _PDWN
GND
V+( V)
V-(V)
V-(I)
V+( I)
GND
C33
C32
C31
R26
GND
C34
C35
C36
C37
C38
C39
C40
C41
C43
C42
+1.8VGND
GND
Figure 5: AD9251 peripheral circuit schematic.
3.2 Signal Processing Module
The XC7Z045 chip of Zynq-7000 series is the main
control chip of the monitoring device. It is an SoC
chip, which integrates the dual-core ARM Cortex-A9
processor and Xilinx 7 series FPGA. It has rich
resources and communication interfaces, which is
convenient for developers to expand and develop, and
its working frequency is up to 1GHz. Data processing
speed is fast. The monitoring device will carry out
data calculation and analysis for each cycle signal,
and package the calculated results and upload them
every 100ms. At the same time, the original data will
be packaged and uploaded at different sampling rates.
The large amount of data requires high data
processing speed of CPU. XC7Z045 is selected as the
main control chip to make full use of its high
computing speed.
The signal processing module mainly uses the
FPGA contained in the main control chip to complete
data processing, and uses the ARM contained in it to
complete the configuration management and external
communication of the device. In this paper, the
monitoring device uses 10Msps sampling rate for
original data acquisition, and 12.8K/S rate for data
extraction (256 data points per cycle) for the
calculation of power quality parameters, including
voltage and current RMS. Frequency; Active,
apparent and reactive power; Power factor; Dc offset;
Voltage deviation; Voltage fluctuation; Voltage and
current harmonics (up to 65 times); Voltage, current
waveform distortion and other parameters. Every
cycle, all parameters except harmonics and voltage
fluctuation parameters are calculated, and every
100ms (5 groups of data are averaged) are packaged
and uploaded. The harmonic parameters are
calculated every 100ms, and the data of each
harmonic component is packaged, and the voltage
fluctuation parameters are calculated every minute.
The data of each parameter is calculated and
packaged in FPGA, and then transmitted to ARM. In
ARM, network data is transmitted through TCP
protocol.
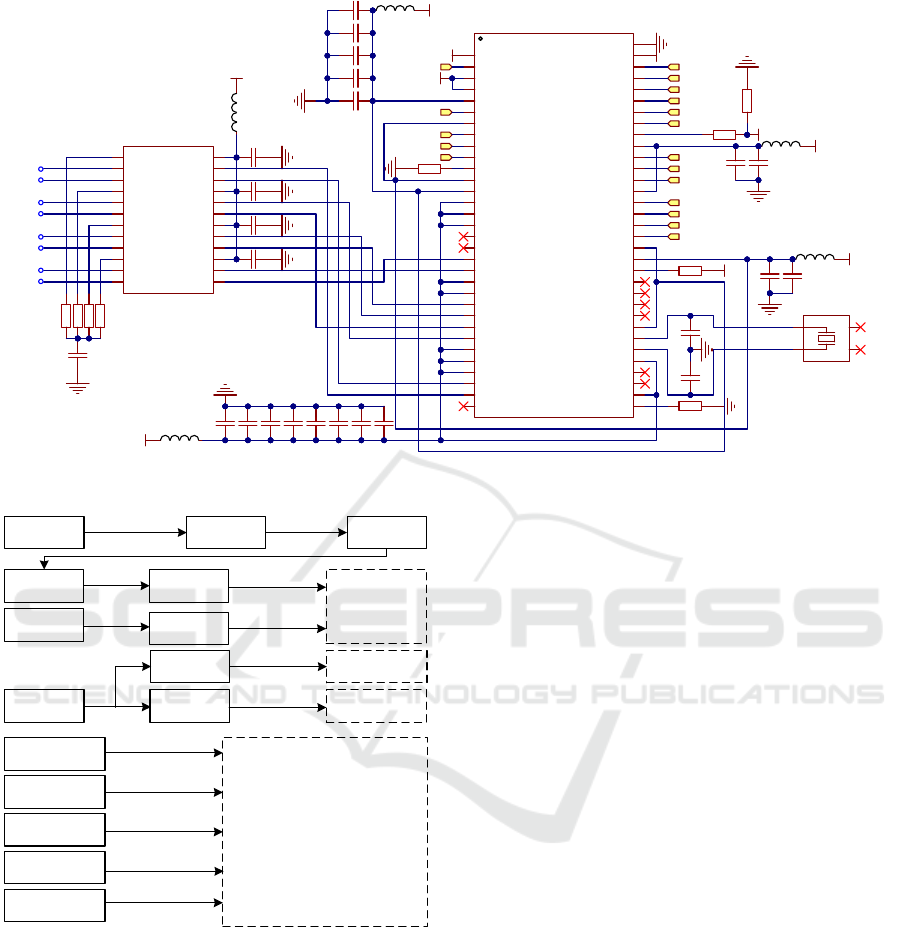
3.3 Data Transmission Module
As shown in Figure 6, this system builds gigabit
Ethernet circuit for data communication, selects
88E1116R Gigabit Ethernet chip for Ethernet circuit
construction, and HR682430E network transformer
chip for output isolation. 88E1116R chip supports
1.8V and 1.2V power supply, is a low-power
10/100/1000Mbps Ethernet chip, it integrates the
MDI interface terminal resistor, eliminates 12 passive
devices, reduces the complexity of peripheral circuits,
And its reference clock supports 25MHz±50ppm
tolerance crystal reference or oscillator input,
reducing development costs. At the same time, it also
has the following features: support for full duplex and
half duplex mode, support for IEE 802.3u adaptive
rate negotiation, support for IP\TCP\UDP uninstall
acceleration, support for MAC address filtering and
broadcast storm suppression.
3.4 Power Supply Module
The power module is responsible for the power
supply of the entire hardware system. In this paper,
the hardware system uses DC power supply for power
supply, and several power management chips are
selected to convert the voltage into the power supply
voltage required by each module chip. The power
supply logic diagram is shown in Figure 7. The
transient voltage suppression diode (TVS) of model
AMPA36CA is connected at the overall power input
end of the hardware system to protect the overvoltage
of the power supply end of the hardware system. The
operating voltage of TVS of this model is 10-36V, so
the overall power supply range of the hardware is
DC10-36V. After TVS is the model TPS54560 DC-
DC step-down chip, which is used to convert the input
DC10~36V voltage into DC8V, and then use the
power management chip to convert step by step, and
finally output the power supply voltage required by
each module.
Power Quality Monitoring Device of EMU Traction Network Based on Zynq
49
MCT1
24
MX1+
23
MX1-
22
MCT2
21
MX2+
20
MX2-
19
MCT3
18
MX3+
17
MX3-
16
MCT4
15
MX4+
14
MX4-
13
TCT1
1
TD1+
2
TD1-
3
TCT2
4
TD2+
5
TD2-
6
TCT3
7
TD3+
8
TD3-
9
TCT4
10
TD4+
11
TD4-
12
HR682430E
CONFIG[1]
1
CONFIG[2]
2
CONFIG[3]
3
COMAn
4
DVDD
5
LED[0]
6
VDDO
7
LED[1]
8
LED[2]
9
RESETn
10
TRSTn
11
DIS_REG12
12
DVDD
13
AVDDR
14
AVDDR
15
AVDDX
16
CTRL18
17
NC
18
MDIN[3]
19
MDIP[3]
20
AVDD
21
AVDD
22
MDIN[2]
23
MDIP[2]
24
MDIN[1]
25
MDIP[1]
26
AVDD
27
NC
28
AVDD
29
MDIN[0]
30
MDIP[0]
31
TSTPT
32
RSET
33
AVDDC
34
HSDACN
35
HSDACP
36
AVDDC
37
XTAL_IN
38
XTAL_OUT
39
DVDD
40
TMS
41
TCK
42
TDI
43
TDO
44
MDIO
45
VDDO
46
DVDD
47
MDC
48
RX_CTRL
49
RXD[0]
50
RXD[1]
51
VDDOR
52
RX_CLK
53
RXD[2]
54
RXD[3]
55
VDDOR
56
VREF
57
TXD[0]
58
TXD[1]
59
TX_CLK
60
TXD[2]
61
TXD[3]
62
TX_CTRL
63
CONFIG[0]
64
PAD
65
88E1116R
C54
GND
FB1
BLM15PD121SN1D
+1.8V
C55
GND
C56
GND
C57
GND
C53
GND
MX1_P
MX1_N
MX2_P
MX3_P
MX3_N
MX2_N
MX4_P
MX4_N
+1.8V
PHY_LED1
+1.8V
PHY_LE D0
PHY_LE D1
PHY_LE D2
PHY_RESETn
R67
GND
C62
C61
C60
C59
C58
FB2
BLM15PD121SN1D
+1.2V
GND
C73 C74
FB3
BLM15PD121SN1D
+1.8V
GND
C63C64C65C66C67C68C69C70
FB4
BLM21PG220 SN1D
GND
+1.8V
R70
GND
4
1 2
3
X322525MSB4SI
C75
C76
GND
R69
+1.8V
PHY_MDC
PHY_RXD0
PHY_RX_CTRL
PHY_RXD1
C71 C72
GND
FB5
BLM15PD121SN1D
+1.8V
PHY_RX_CLK
PHY_RXD2
PHY_RXD3
R68
R35
GND
-1.8V
PHY_TXD0
PHY_TXD1
PHY _TX_CLK
PHY_TXD2
PHY_TXD3
PHY_TX _CTRL
+1.8V
GND
R63
R64
R65
R66
Figure 6: Gigabit ethernet transcelver and network transformer circuits.
DC
(10-36V)
TVS
(AMPA36CA)
DCDC
(TPS54560)
DCDC
(SY8263)
LDO
(ADP7104)
DCDC
(SY8263)
LDO
(LT3094)
Analog
DCDC
(SY8263)
LDO
(MF7672)
LDO
(ADP7104)
ADC
PLL
DCDC
(HNE-12S20)
DCDC
(SY8263)
DCDC
(SY8263)
DCDC
(SY8263)
DCDC
(SY8263)
Z7_Core
Z7_MGTAVTT
Z7_VCCAUX
Z7_DDR
Z7_VCCO
ZYNQ 7Z045
+6.0VDDA
1A
+5.0VDDA
0.5A
1A
-6.0VDDA
0.5A
-5.0VDDA
+3.8V
3A
+1.8VA
0.5A
+3.3VCLK
2A
+1.0V/20A
+1.2V/3A
+1.8V/3A
+1.5V/3A
+3.3V/3A
Figure 7: Power supply logic diagram.
4 SOFTWARE DESIGN
In order to visualize the data of the monitoring device
and facilitate the user's use and management, it is
necessary to develop the upper computer software. Qt
Creator is a cross-platform graphical interface
development platform that mainly supports C++ and
Python languages. At the same time, Qt has a rich
API, the library functions needed in the development
process can be found in the API, and it also provides
rich help documents, so that every developer can
quickly get started, so Qt is widely used in GUI
program development. In this paper, the host
computer chooses the Windows version of Qt for
software development, mainly realizes the data
communication with the monitoring device,
completes the configuration management, data
display and data storage functions.
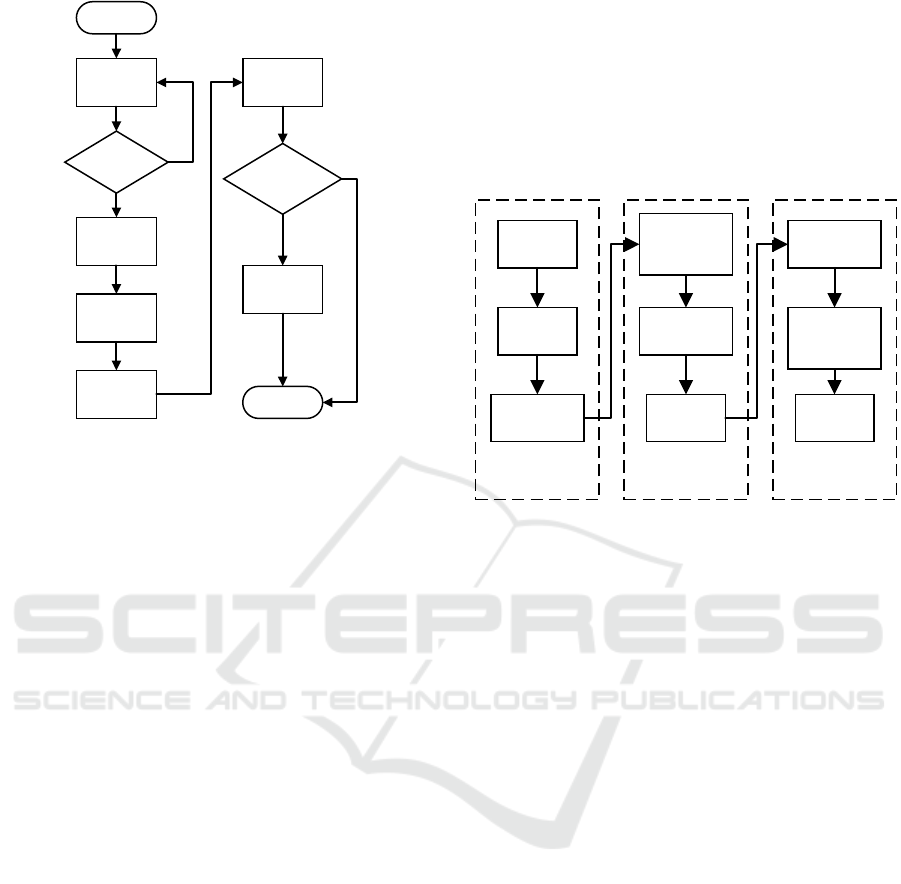
In this paper, the monitoring device and the host
computer are located in the same LAN using gigabit
network. The monitoring device is the server and the
host computer is the client. In the TCP protocol, each
server has its own IP address, and the client can only
communicate with the server after searching for and
connecting to the server's IP address. The running
process of the host computer in this paper is shown in
Figure 8. First, the UDP protocol is used to broadcast
search for the IP address of the device in the LAN,
and after searching for the IP address, it returns and
connects to the TCP network port. After connecting
the port, corresponding data is transmitted. Different
packets transmit data through different network ports.
Therefore, after the host computer successfully
connects to the acquisition card, the port data needs to
be analyzed according to the communication
protocol, and the analyzed data is filled to the
corresponding area for display. You can choose
whether to store the data as required. If yes, the data
is saved to a local folder and the file is named after
the storage time.
DMEIS 2024 - The International Conference on Data Mining, E-Learning, and Information Systems
50
Start
Search IP
address
Found a
device?
Connect
Data reception
Data
waveform
display
Data storage?
Data saved
locally
End
Yes
Yes
No
No
Da ta par sing
Figure 8: Upper computer software running flow.
In software interface design, Qt's built-in GUI
interface class functions, such as QWidget,
QGridLayout, QTableWidget, etc., and GUI
component class functions, such as QPushButton,
QLabel, QTextEdit, etc., are used to complete the
overall design of the interface. Due to the presence of
multiple ports for data transmission at the same time,
the amount of data is large, so the response and
processing speed of the upper computer software is
particularly important, the use of multithreading can
make better use of system resources, make full use of
the idle time of the CPU, and use as little time as
possible to make the system respond. Therefore, the
design of the upper computer software of this system
adopts multi-thread method for data processing. It can
be roughly divided into receiving, parsing and display
three threads, and use Qt's "signal and slot"
mechanism to complete the data communication
between threads, and the data communication process
between threads is shown in Figure 9. First of all, after
the host computer successfully connects the IP
address of the acquisition card and the corresponding
port in the data receiving thread, it uses the
"readAll()" function in the QTcpSocket class to
receive data, uses a byte stream object as the
temporary cache of data, and then transmits the
parsing signal, which will transmit the byte stream
object. The parse slot function in the parse thread is
called at this point. In the parsing slot function, the
byte stream object in the signal is first received, and
the semaphore is then released so that the parsing
thread has resources to begin parsing the data. When
the data is parsed, the data will be stored in the
QVector container class object, and then the display
signal will be transmitted, and the display signal will
also be transmitted to the corresponding container
class object. At this time, the display slot function in
the display thread will be called. In the display slot
function, the data in the container class object is first
received, and then the data is filled into the
corresponding area for display.
Connect
readAll()
Emit parsing
signal
Calling the
parse slot
function
Release
semaphore
Parse data
Emit display
Signal
Calling the
display slot
function
Display
data
Data Receivin g
Thread
Data Pars in g
threads
Data Display
Thread
Figure 9: Data communication between threads.
5 TEST VERIFICATION
In order to verify the calculation accuracy of various
parameters of the device, a three-phase standard
power source STR3060A is used for experimental
verification. The standard power is derived from basic
parameters such as RMS value, frequency, power and
harmonics of the output voltage and current that can
be displayed in real time with a screen, with an
accuracy of 0.5, and its single-phase sinusoidal output
is connected to the monitoring system for precision
comparison and verification. Set the fundamental
voltage RMS value of 100V, the current RMS value
of 1A, the third harmonic content of 20%, the fifth
harmonic content of 5%, and the seventh harmonic
content of 5%, adjust the fundamental frequency, and
record and compare the total voltage and current
distortion rate of the STR3060A and the monitoring
device respectively. The test results are shown in
Table 1.
The experimental results show that the maximum
relative error of voltage RMS calculation is 0.15V, the
maximum error of current RMS calculation is
0.007A, the maximum error of frequency calculation
is accurate, the maximum error of total voltage
distortion rate is 0.027, the maximum error of total
current distortion rate is 0.033, and the total error is
within 0.5%. It can be verified that the power quality
Power Quality Monitoring Device of EMU Traction Network Based on Zynq
51

monitoring system designed in this paper can measure
and calculate all parameters accurately.
Table 1: Parameter test results based on standard power
sources.
U
RMS
/V I
RMS
/A f/Hz VTHD% ITHD%
STR3060A
99.998 0.999 49.5 21.206 21.219
99.998 0.999 50.0 21.213 21.214
99.998 0.999 50.5 21.218 21.206
Device
99.848 1.006 49.5 21.190 21.239
99.848 1.004 50.0 21.186 21.230
99.848 1.006 50.5 21.190 21.239
6 CONCLUSIONS
This article presents the design of a traction power
grid quality monitoring device for high-speed trains
based on ZYNQ. The device utilizes the XC7Z045
chip from the ZYNQ-7000 series as the main control
chip and is supplemented by other chips such as
AD9251 to achieve overall functional design. It can
analyze multiple power grid quality parameters.
Through experimental comparison and verification,
the device demonstrates parameter calculation errors
within 0.5%, meeting the requirements for practical
monitoring and accuracy. It also offers advantages
such as low cost, fast development, complete
functionality, and easy scalability. The device can be
applied in the field of traction power grid quality
monitoring for high-speed trains, providing reliable
data support for safe operation and maintenance of the
trains, and promoting the advancement of high-speed
train technology.
REFERENCES
Weiwei, Li., Huamin, Ai., 2020, 31(S2). Analysis of power
quality improvement measures for 27.5 kV self-use
electricity in traction station. Electrified railway.
Jianxiong, Zhang., Guo, Wang., 2022, 33(S1). Evaluation
and research on power quality of high-speed railway.
Electrified railway.
Ke, Yin., Cheng, Guo., Gengyin, Li., 2020, 31(05).
Influence of high-speed railway on power quality of
power grid. Electrified railway.
Tao, Liu., 2022. Influence of Hign-speed Railway Traction
Load on Power Quality of Power Grid and
Comprehensive Evaluation. Lanzhou Jiaotong
University.
Liping, Zhao., 2022. Interaction between High-Speed
Railway and Wind Farm and Its Influence on Power
Quality of Power Grid. North China Electric Power
University(Beijing).
Guiping, Cui., 2020. Research on Power Quality and
Braking Energy Recovery Control System of Electrified
Railway. Hunan University.
Zhuo, Liu., 2021. Research on Voltage Reconfiguration
Cascaded Power Quality Integrated Treatment Device
Based on Source Load Decoupling. North China
Electric Power University(Beijing).
He, Wang., 2021. Research on Interaction Influence
Analysis and Coordination Control of Powe Quality
Governance Devices in Distribution Network. North
China Electric Power University(Beijing).
Shuang, Yan., 2020. Research and Application of
Comprehensive Power Quality Control Technology for
Distribution Network. Shandong University.
Guipeng, Zhang., Qingfeng, Wang., Lihua, Xu., et al, 2023,
(07). Power Quality Monitoring and Analysis System of
EMU Based on LabVIEW. Instrument Technique and
Sensor.
Yifeng, Su., Yu, Zhou., Zipei, Guo., et al, 2021, 30(09).
Design and research of portable modular power quality
control device. Guangdong Science & Technology.
Qiang, Li., Liming, Wang., Changlin, Cai., et al, 2021,
21(08). Design of High-speed Data Acquisition System
Based on ZYNQ. Microcontrollers & Embedded
Systems.
Chengyue, He., Yeming, Liu., 2021, 38(12). Design of
ZYNQ Hign-speed Data Acquisition System Based on
AD8285. Application of IC.
Shenggao, Gong., Jin, Ren., 2020, (04). Design of dual-core
power quality monitoring system based on DSP and
ARM. Modern Machinery.
DMEIS 2024 - The International Conference on Data Mining, E-Learning, and Information Systems
52
