
Combined Depth and Semantic Segmentation from Synthetic Data and a
W-Net Architecture
Kevin Swingler
1 a
, Teri Rumble
1
, Ross Goutcher
2 b
, Paul Hibbard
2 c
, Mark Donoghue
2
and Dan Harvey
3
1
Computing Science and Mathematics, University of Stirling, Stirling, FK9 4LA, U.K.
2
Psychology, University of Stirling, Stirling, FK9 4LA, U.K.
3
Neuron5, Scotland, U.K.
{kevin.swingler, ross.goutcher, paul.hibbard, mark.donoghue}@stir.ac.uk, dan@neuron5.co.uk
Keywords:
Computer Vision, Semantic Segmentation, Monocular Depth Estimation, Synthetic Data.
Abstract:
Monocular pixel level depth estimation requires an algorithm to label every pixel in an image with its estimated
distance from the camera. The task is more challenging than binocular depth estimation, where two cameras
fixed a small distance apart are used. Algorithms that combine depth estimation with pixel level semantic
segmentation show improved performance but present the practical challenge of requiring a dataset that is
annotated at pixel level with both class labels and depth values. This paper presents a new convolutional
neural network architecture capable of simultaneous monocular depth estimation and semantic segmentation
and shows how synthetic data generated using computer games technology can be used to train such models.
The algorithm performs at over 98% accuracy on the segmentation task and 88% on the depth estimation task.
1 INTRODUCTION
Pixel level scene understanding requires an algorithm
to label each individual pixel in an image with infor-
mation regarding its role in the scene. Semantic seg-
mentation involves labelling each pixel as belonging
to one of a set of pre-defined classes and panoptic seg-
mentation requires the algorithm to separate different
instances of each class. Depth estimation involves la-
belling each pixel with an estimated distance from the
camera. Depth estimation can act either on stereo im-
ages, in which pairs of images are taken from spe-
cialist devices with two cameras fixed a small dis-
tance apart or on single monocular images. Monoc-
ular depth estimation is more difficult than the stereo
task as there is no image disparity information avail-
able. In the particular situation where video data is
taken from a moving object, it is possible to estimate
depth from changes from one frame to the next.
We have previously shown (Goutcher et al., 2021)
that adding semantic segmentation information to
training data improves the quality of the depth esti-
mation predictions in the stereo depth estimation task
a
https://orcid.org/0000-0002-4517-9433
b
https://orcid.org/0000-0002-0471-8373
c
https://orcid.org/0000-0001-6133-6729
but this introduces the need for training data that have
been labelled at a pixel level with both depth and se-
mantic segmentation tags. Labelling depth ground
truth may be performed using specialist equipment
such as LiDAR, but semantic segmentation labelling
is still a time intensive human activity and prone to
error.
Software for generating life-like scenes in com-
puter games such as Unity and Unreal is known as a
games engine. The quality of the graphics produced
by these engines has increased dramatically in recent
years and the images are now sufficiently life-like that
they can be used for training computer vision algo-
rithms. The use of games engines allows us to gener-
ate large quantities of quality training images that are
automatically and correctly labelled with both depth
and semantic category information at the pixel level.
This removes the need for human labelling by hand,
meaning the data are error free. The human work of
labelling is replaced by the human work of program-
ming the games engine, but the investment in time has
a better return as it is easy to change the parameters of
an artificial environment and produce a new dataset,
whereas re-collecting and labelling real world data is
very time consuming. For example, we are able to
generate the same dataset under a variety of condi-
Swingler, K., Rumble, T., Goutcher, R., Hibbard, P., Donoghue, M. and Harvey, D.
Combined Depth and Semantic Segmentation from Synthetic Data and a W-Net Architecture.
DOI: 10.5220/0012877500003837
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Joint Conference on Computational Intelligence (IJCCI 2024), pages 413-422
ISBN: 978-989-758-721-4; ISSN: 2184-3236
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
413

tions by varying lighting, weather, time of year and
time of day.
It is possible to produce both monocular and
binocular datasets using a games engine. Training
data can be generated as a set of snapshots from
random locations in an environment or as a series
of video frames constructed by moving a camera
through the environment. Cameras may move in a
simple pattern such as following a straight line or ro-
tating around a point, or they can be virtually mounted
to a vehicle that is programmed to follow the roads in
the environment. This method produces more realis-
tic sequences for training models to operate in similar
environments in the real world. The games engine can
tag each pixel in an image with semantic or panoptic
class labels and with a depth (distance from camera)
measurement.
The paper makes the following contributions: We
describe a new architecture capable of predicting
depth and semantic class labels from monocular im-
ages. The architecture is based on the well known
U-Net (Ronneberger et al., 2015) model, but has two
connected U-Nets, leading us to call it a W-Net ar-
chitecture. We compare different cost functions and
describe an approach to depth estimation that treats
depth as a category rather than a continuous variable.
The paper also describes the benefits of training ma-
chine vision algorithms on data generated by a games
engine.
2 BACKGROUND
2.1 Depth Estimaton
Active detection systems such as LIDAR (Park et al.,
2018) and RADAR (Long et al., 2021) can be ex-
tremely precise and helpful in solving the depth es-
timation problem but are not suitable for mass de-
ployment due to cost and processing and power re-
quirements. Passive systems utilising infrared light
such as RGBD cameras are cheaper than both LIDAR
and RADAR. They calculate depth information ac-
curately through measuring the dispersal of a known
infrared light pattern within the scene, similar to Li-
DAR. However, they do have some limitations as re-
ported by Alhwarin et al. (Alhwarin et al., 2014).
They found that RGBD cameras struggled to deal
with both highly reflective surfaces and light absorb-
ing materials. Furthermore, they noted that the use of
multiple RGBD cameras in the same scene resulted in
the IR patterns interfering with each other, as can hap-
pen with LiDAR if the frequencies match. These con-
straints would be somewhat problematic under condi-
tions of mass deployment without adding the layers
of complexity that the authors suggest in order to mit-
igate against these issues.
Stereo vision depth research focuses on tech-
niques inspired by human vision including triangu-
lation through parallel or intersecting optical axis
binocular vision (Wang et al., 2017) and estimation
of depth through binocular disparity cues (Mansour
et al., 2019). Whilst very effective these are not very
practical for affordable mass deployment due to re-
quiring two cameras (therefore twice the cost as well
as ongoing maintenance to ensure precise calibration)
which inevitably constrains the robustness of these
solutions in an applied setting. It is clear that accu-
rate monocular depth estimation would be preferable
on this basis. Monocular depth perception has taken
great strides in recent years due to the ability of CNNs
to learn complex monocular depth cue patterns such
as object size, texture, and linear perspective. How-
ever, it is not without its own set of problems, such
as resolving the focal length of the camera and image
defocus and blur as summarised by Paul et al. (Paul
et al., 2022). A novel approach to extracting more
depth information from a single image was demon-
strated by Lee et al. (Lee et al., 2013) using dual
aperture cameras to simultaneously capture red and
cyan filtered light in an attempt to establish a depth
relationship between the information contained in the
differing light channels. Although they successfully
demonstrated that this method is viable as a means of
estimating depth from a single monocular source, it
does require the use of specialised camera equipment.
There are several monocular depth estimation
techniques that use temporal image sequencing
(Palou and Salembier, 2012), (Li et al., 2021), (Chen
et al., 2020) instead of binocular images. Using se-
quential frames from a video feed allows researchers
to simulate binocular left and right image pairs if the
monocular frame rate and speed of motion is care-
fully considered. Depth estimation from motion has
the advantages of a monocular approach in that it only
requires a single commodity camera but introduces a
number of technical challenges if the speed of mo-
tion varies. It is easy to produce images sequences
from a games engine with a constant inter-frame off-
set but this is not a constraint that is practical in real
world applications. A simple monocular approach has
the additional benefit of requiring fewer processing
resources than either a stereo or a temporal off-set ap-
proach as it acts on one frame instead of two.
Perhaps the most well known monocular depth es-
timation approach is an algorithm known as MiDaS
(Ranftl et al., 2020). The authors note that a lack of
diverse training data is a limiting factor for building
NCTA 2024 - 16th International Conference on Neural Computation Theory and Applications
414

depth estimation models and propose a system capa-
ble of combining data from different sources. As we
have already noted, collecting depth information for
training networks is more costly and technically chal-
lenging that the task of collecting images for tasks
such as classification or object detection as many stan-
dard sources of image data lack a depth channel.
The depth estimation problem is almost exclu-
sively treated as a regression task in the literature.
Notable exceptions are Cao et al. (Cao et al., 2017)
and Su et al. (Su et al., 2019), who both explore the
possibility of casting depth estimation as a classifi-
cation task. Depth may be quantized into a set of
bins with the depth estimate being taken as the bin
with the highest likelihood. This method provides a
natural representation of confidence levels for predic-
tions as more than one possible depth can be repre-
sented at once. We test the hypothesis that treating
the depth estimate as a classification task allows for
sharper changes at the edges of objects.
2.2 Image Segmentation
Segmentation tasks broadly fall into one of three cat-
egories. Semantic segmentation (Liu et al., 2019) at-
tempts to label each pixel in an image by its class.
Some classes are objects (such as cars and people)
and other classes are known simply as stuff, which
includes sky, grass, foliage, etc. Instance segmenta-
tion (Tian et al., 2021) aims to label individual ob-
jects (car1, car2 etc.) but ignores pixels that belong to
the stuff class. Panoptic segmentation (Kirillov et al.,
2019) labels all pixels (objects and stuff) but separates
objects into instances.
Deep learning, specifically the fully convolution
network (FCN) (Long et al., 2015), has proven to
be very useful in the task of scene understanding
through segmentation. Ronneberger et al. (Ron-
neberger et al., 2015) introduced U-Net as the first
encoder-decoder network for semantic segmentation
along with the skip connection. The U-Net architec-
ture and its variants remains one of the most effec-
tive encoder-decoder networks in the field of seman-
tic segmentation. U-Net++ was proposed by Zhou et
al. (Zhou et al., 2019) in 2020, followed by TMD
U-Net (Tran et al., 2021) in 2021 by Tran et al. to
overcome one of the main limitations of U-Net in that
the skip connection requires feature fusion at match-
ing scales. Whilst not focusing on skip connection
limitations, our own research builds upon the basic
U-Net and demonstrates that it is an architecture ca-
pable of being utilised within the domain of simulta-
neous segmentation and depth estimation in the style
of multi-task learning.
More advanced algorithms such as STEGO (Self-
supervised Transformer with Energy based Graph
Optimisation) (Hamilton et al., 2022) and DINO
(Caron et al., 2021) have also been used for seman-
tic segmentation. STEGO combines the two key in-
novations from DINO, namely transformers and self-
supervised learning in the form of self-distillation,
with contrastive clustering. Transformers may have
gained in popularity in part due to their efficiency in
requiring substantially less computational resources
but this comes at a price. A drawback of the underly-
ing vision transformer (ViT) architecture is that ViTs
require a huge amount of data (Dosovitskiy et al.,
2020) to achieve parity with, or to beat state of the art
CNNs (approx. 14m+ images) which makes them un-
feasible for smaller projects with niche datasets when
training from scratch. U-Net on the other hand per-
forms extremely well even with smaller datasets.
Panoptic segmentation is relatively new. Proposed
by Kirillov et al. (Kirillov et al., 2019), panoptic seg-
mentation combines semantic and instance segmen-
tation into the single task of labelling each individ-
ual instance of each class separately. In this sense,
it is very similar to the well-known object detection
task, where individual objects are identified and lo-
cated within a rectangular bounding box. The in-
troduction of pixel level depth estimation makes the
panoptic segmentation task easier as pixels that are
adjacent in the flat image plane can be separated in the
three dimensional representation that follows depth
segmentation.
3 DATA SETS
One of the biggest challenges to investigating the full
potential of deep learning networks is the availabil-
ity of high-quality datasets with suitable annotations.
Pixel level annotations of both depth and semantic
segmentation can be particularly expensive to pro-
duce. To address this issue, we developed a synthetic
dataset using the Unity games engine, giving us full
control over the scene contents and variables such as
weather, visibility and time of day, in order to pro-
duce a suite of progressively more difficult scenes on
which to train and refine a model. This vastly sped up
the research cycle and facilitated fast, iterative devel-
opment without incurring excessive time or financial
costs to the research schedule.
Procedural scene generation uses algorithms to
produce landscapes, vegetation, varied terrain, sky
conditions (like clouds) and bodies of water. Roads
and streets that follow the terrain can be added and
buildings, vehicles, other man-made objects, and peo-
Combined Depth and Semantic Segmentation from Synthetic Data and a W-Net Architecture
415

ple can be placed in a stochastic fashion. This ensures
both great variation in scene content and a realistic ar-
rangement of objects.
Images are generated from the scene from virtual
cameras that can be fixed or move along a predeter-
mined path. Once a world has been defined, the fol-
lowing data collection tasks are made easy:
• Altering the number of examples of objects from
each class to control class bias
• Altering weather conditions, time of day, lighting,
and season (for example rendering trees with or
without leaves)
• Changing the camera angle and viewpoint
• Automatically labelling every pixel in the image
with depth and semantic labels.
3.1 Custom Dataset Creation
The dataset used in this study was produced with dig-
ital content creation (DCC) software SideFX’s Hou-
dini version 19.0.498 and the real-time rendering en-
gine Unity version 2021.1.28f with some pre-made
asset packs available on the Unity store. Houdini is
frequently used to produce environments for films and
games because it allows users to build complex pro-
cedural content without having to write custom algo-
rithms for each use case. Unity is most often used as a
games engine but recently has increasingly been used
in computer vision applications because of its ability
to render large volumes of digital content. Here Unity
is supported by the open-source package Unity Per-
ception (version 0.9.0 preview 2) that adds common
functionality for computer vision applications. Hou-
dini has excellent integration with Unity through the
Houdini Engine for Unity (version.4.2.8) that allows
Houdini node graphs to be packed into a Houdini Dig-
ital Asset (HDA) that can then be rendered in Unity.
Procedural content can be developed in Houdini, ren-
dered in Unity and automatically annotated with the
relevant pixel level ground truths such as depth and
segmentation label.
Scenes were rendered as if taken from cameras
fixed to a vehicle driving along a road that winds
through the virtual world. Three virtual cameras were
used, one looking forward, and one each looking left
and right. Terrain, object placement and lighting were
randomly varied. Object placement utilised either a
physics-based ground collision system (more suitable
for loose objects), or a ray casting system (more suit-
able for objects that are fixed to the ground surface),
such that objects settled in natural positions consis-
tent with the surface terrain. An example of a training
Figure 1: An example image and associated data, showing
the natural scene, the semantic segmentation and the depth
map as generated by the Unity games engine. In the depth
map, the lighter the grayscale, the further from the camera
the pixel lies.
image, segmentation map and depth map are shown
in figure 1.
The world from which images were sampled was
an area of trees and hills dotted with settlements
of different buildings, vehicles and man-made ob-
jects. A two stage hierarchy of class labels was used.
Firstly, pixels were identified as being either objects
of interest or as surroundings such as ground, sky or
foliage. Each pixel was also labelled as belonging to a
single class such as house, car, truck, etc. There were
19 different classes in the data. The class labels were
used to train the network and the differentiation be-
tween objects and surroundings was used to calculate
NCTA 2024 - 16th International Conference on Neural Computation Theory and Applications
416
performance metrics on both the scene as a whole and
on objects of interest alone.
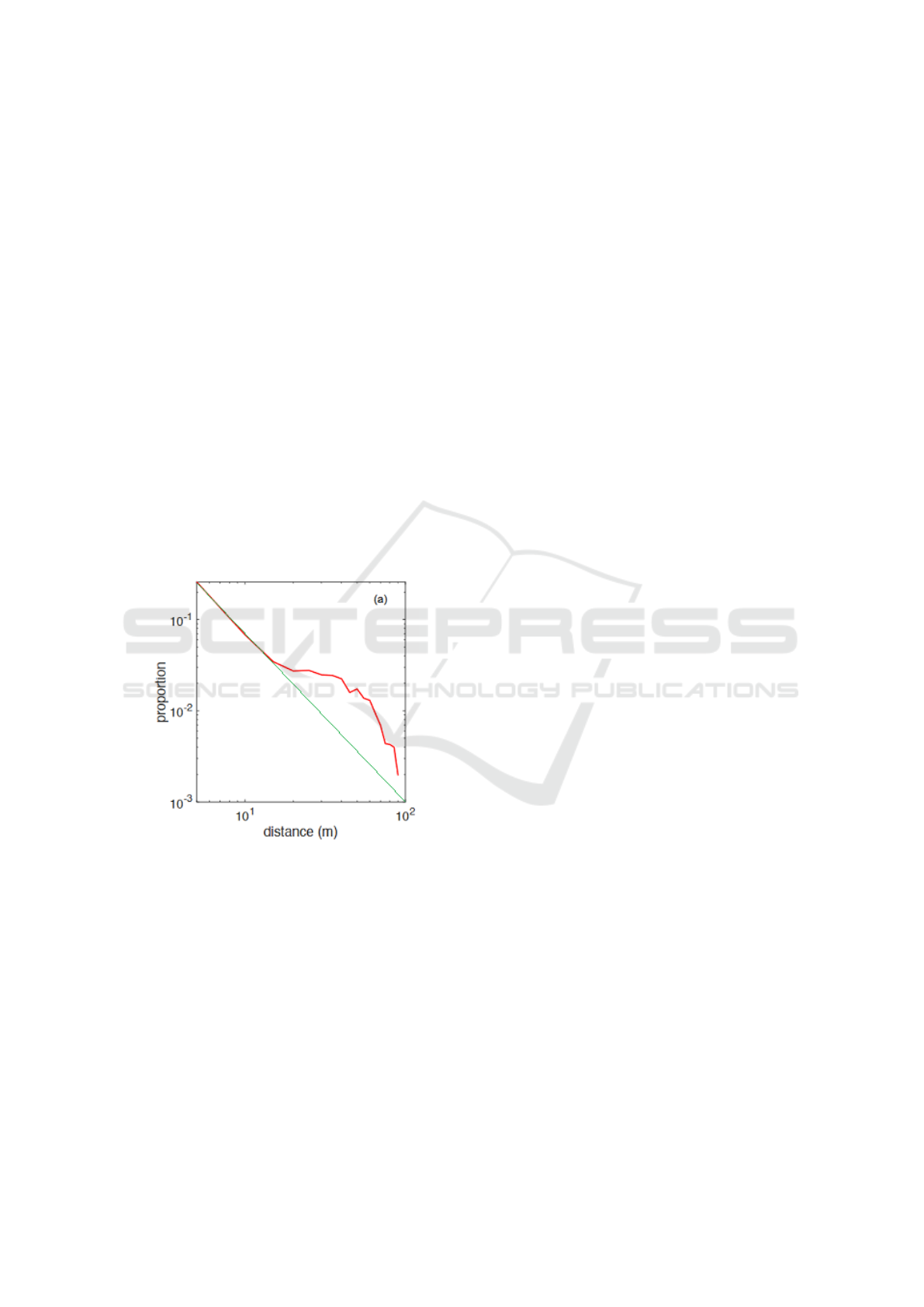
3.2 Scene Statistics of a Custom Dataset
Our synthetic scenes were validated by statistical
comparison with natural scenes. Images of the nat-
ural world have predictable statistical properties, re-
flecting structural constraints such as the presence
of the ground plane and vertical structures such as
trees and buildings (Simoncelli, 2003), (Hibbard and
Bouzit, 2005), (Hibbard, 2007). We verify the va-
lidity of our dataset by demonstrating that our scenes
have the same statistical properties as natural scenes.
The critical statistic in this case is the distribution of
distances to visible points. Analysis of LIDAR im-
ages has shown that the probability distribution of dis-
tances to visible points falls exponentially with dis-
tance (Yang and Purves, 2003). This distribution ap-
pears as a straight line when plotted on log-log axes.
The probability distribution of distance for our scenes,
plotted in figure 2, is close to the expected exponential
distribution.
Figure 2: The distribution of distances in the images shows
the expected exponential distribution (shown on a log-log
scale). The red line shows the distribution of distances in the
synthetic data and the green line shows a theoretical natural
relationship.
4 ARCHITECTURE AND
TRAINING
The W-Net architecture introduces two novel ap-
proaches. The first novel approach is the use of back-
to-back U-Nets with the first U-Net performing se-
mantic segmentation and the second U-Net perform-
ing depth estimation. The second novel approach is
to treat depth estimation as a classification task rather
than the typical regression estimation.
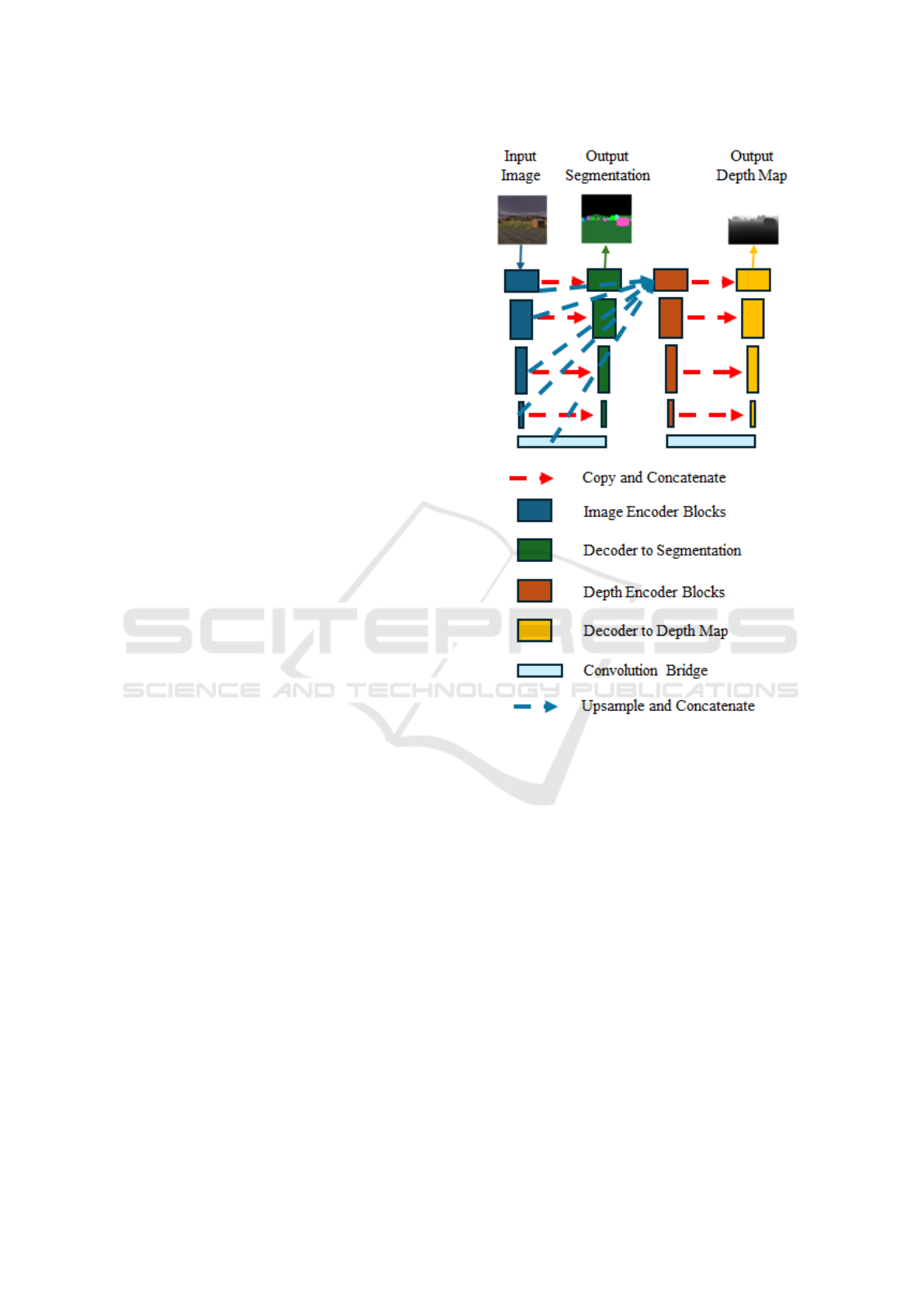
4.1 Proposed Architecture
4.1.1 General Network Shape
Figure 3 shows a schematic of the proposed W-Net
model architecture. The general shape is of two U-
Nets in series, arranged so that the first U-Net receives
an image as input and produces a segmentation mask
as output. The second U-Net produces the depth map
as its output and receives its input from the first U-Net
in a way that is explained in more detail below.
The first U-Net has two stages: the encoder stage
and the decoder stage. The encoder stage contains a
series of four blocks, each with the same set of op-
erations that produce feature sets of different sizes.
Each block applies two repetitions of 2D convolution
followed by batch normalization. In each block, this
doubles the number of channels. Each block then per-
forms 2D max pooling to halve the size of each chan-
nel and passes the output from this stage into the next
block.
The output from the fourth block passes through
one more convolution stage, which we call the bridge,
the output of which is used for two different pro-
cesses. It forms the input to the decoding stage of
the segmentation U-Net and it contributes the input
to the depth estimation U-Net. The decoder stage
of the segmentation U-Net contains a series of four
blocks, each of which performs an upsampling oper-
ation, then concatenates the channels from its equiv-
alent layer in the encoder stage. The resulting set of
filters then pass through a convolution and batch nor-
malisation. The size and shape of each layer changes
in a way that increases the size of each channel and re-
duces the number of channels. The final output layer
from the decoder stage produces a tensor of shape
h × w × c where h is the height of the input image, w
is the width of the input image and c is the number of
classes the model can classify. The final dimension,
c is one-hot encoded in the training data and passed
through a softmax function at the output of the model.
The class for each pixel is determined as that with the
maximal output value.
The depth estimation part (the second U-Net) does
not take the original image as its input. Its input is
built by a series of upsampling and concatenation op-
erations starting at the bridge layer from the bottom
of the first U-Net. A four stage upsampling process
takes the bridge layer output and performs an upsam-
ple followed by a concatenation with the filters from
Combined Depth and Semantic Segmentation from Synthetic Data and a W-Net Architecture
417
the encoder channel of the U-Net. No convolutions
take place, the filters are simply concatenated and up-
sampled once for each layer in the U-Net. The pro-
cess mirrors the decoder channel of the segmentation
U-Net in the sense that it upsamples and concatenates
the encoder channel in reverse order, but there are no
convolutions to reduce the number of channels.
After this input, the depth U-Net has a structure
that is almost identical to the segmentation U-Net ex-
cept that the bridge at the bottom of the U-Net has
five layers of convolution and the final output layer
encodes the depth output. Two different encodings
for depth were compared. In one case, depth was en-
coded as a single numeric output for each pixel in the
image, making depth estimation a regression task. In
the other, the task was a classification problem as each
pixel used a categorical (one-hot) encoding. The dif-
ferences between the two approaches are discussed in
the results section.
The size of the layers at each point in the net-
work are as follows. Input images are 224 × 224 × 3
and RGB encoded. The segmentation U-Net en-
coder stage produces layers of size: 112 × 112 × 16,
56 × 56 × 32, 28 × 28 × 64, 14 × 14 × 128 and the
segmentation bridge output layer is 14 × 14 × 256.
The decoder stage has layers of the same shape,
but in reverse order until the output layer of shape
112 × 112 × c where c is the number of classes.
The depth estimation U-Net input is built as fol-
lows. The output from the segmentation bridge and
each stage of the segmentation encoder channel is up-
sampled to a size of 224 × 224 across all channels.
The number of channels in each of those layers, as
described above, is 256 in the bridge and 16, 32, 64
and 128 respectively in the encoder layers. Concate-
nating those channels produces an input to the depth
estimation U-Net with shape 224 × 224 × 496, which
becomes 112 × 112 × 16 in the next layer. From
there, the pattern is the same as that for the segmenta-
tion U-Net in both directions (encoder and decoder).
The depth decoder output shape is 224 × 224 × 1
when a numeric estimation of depth is given and
224×224×256 for depth classification, allowing 256
distinct depth values. All of the convolution filters are
3 by 3 with padding to create an output of the same
size as the input.
4.2 Hyper Parameters for Training
Stability
Weights were initialised using HeNormal (He et al.,
2015) initialisation, which is better suited to the use
of ReLU activation functions. This was found to lead
to more stable training profiles. A bias initialiser
Figure 3: The W-Net architecture consists of two U-Nets.
The first U-Net accepts an image as input and produces a
segmentation map as output. The input to the second U-Net
(the depth predictor) consists of the result of upsampling the
segmentation bridge output and each segmentation encoder
level, each to a size of 224 × 224 (the input image size) and
then concatenating those channels to form an input shape of
224 × 224 × 496.
term was added (Goodfellow et al., 2016), which
further improved stability. It was discovered that
setting the bias initialisation to 0.1 produced better
results than setting it to 1.0. Dropout was found to
be the most effective form of regularisation and 2D
Spatial Dropout was added to the encoder layers in
increasing amounts (0.1, 0.1, 0.2, 0.3) and applied
after the max pooling layer. Applying the dropout in
this way ensured the integrity of the skip connection
whose job is to provide specific spatial information
to the decoder and did not cause any unnecessary
fluctuations in the max pooling operations. Dropping
entire banks of filters once layer operations are
complete forces each level to learn more robustly as
NCTA 2024 - 16th International Conference on Neural Computation Theory and Applications
418
seen with dropout in fully connected networks.
The final enhancement for training stability was
to switch from the ReLU activation function to eLU.
Proposed by Clevert et al. (Clevert et al., 2015), the
use of eLU leads to faster and more accurate training.
The presence of negative activation values reduces the
amount of variance pushed through the forward prop-
agation phase by shifting the mean unit activation gra-
dient closer to zero leading to improved generalisa-
tion and accuracy. According to the authors, this ac-
tivation is particularly helpful to deep networks con-
taining more than 5 layers.
4.3 Output Layer and Loss Function
The network described in this paper uses a categorical
output layer for depth estimation, rather than the more
usual choice of a single numeric measure of depth.
This has the disadvantages of adding a little to model
complexity and of limiting the resolution of the depth
estimates. It offers the advantage of allowing sharper
and larger changes in depth between neighbouring
pixels as there is no continuum from one depth class
to the next. This is a general difference between re-
gression models, which learn a smooth output func-
tion, and classification models, which learn sharp
boundaries. We use 256 discrete distance classes, all
but one representing a depth bound of one metre. The
final class represents a depth of further than 255 me-
tres (in our images, that is mostly the sky).
A series of experiments were performed to com-
pare a numeric depth prediction (i.e. a regression
task) with different cost functions against the cate-
gorical model. Three different loss functions were
compared: Mean Squared Error (MSE) and weighted
Structural Similarity Index (SSIM) (Yang and Purves,
2003) for the regression task and categorical cross-
entropy for the depth classification task.
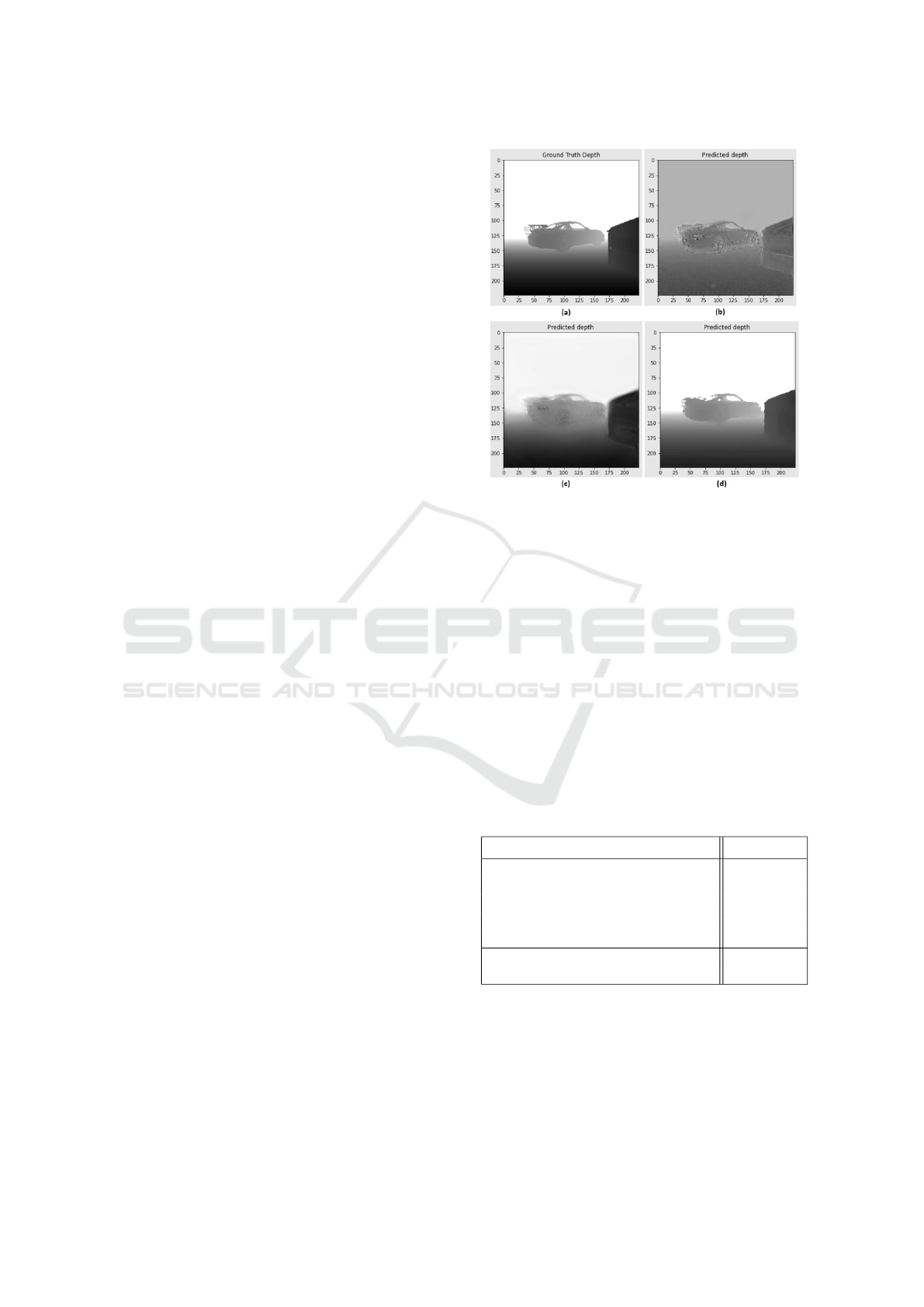
Figure 4 shows an example set of results on a sin-
gle image. The classification model was better able to
identify very far objects and was also better at sep-
arating the depth of neighbouring pixels that were
at very different depths. This confirms the hypothe-
sis that a classification model would be able to learn
sharper depth boundaries, compared to a regression
model that learns a smooth function.
4.4 Training
Ten percent of the dataset were randomly partitioned
as the test set. The remaining data was split randomly
with an 80/20 ratio to form the training and validation
subsets. The models were trained for 200 epochs with
Figure 4: Early loss function experiments showing the qual-
ity of depth estimation with three different cost functions:
(a) Ground Truth (b) MAE (c) Weighted SSIM (d) classifi-
cation with Categorical Cross-entropy.
early stopping (patience: 40) and reduced learning
rate on plateau conditions (patience: 10, factor: 0.5).
The Adam optimiser was used with a learning rate
of 0.001 and a constant categorical cross entropy loss
function for segmentation, along with a final batch
size of 4. It was noticed on the first training run
that the decreased batch size had a regulating effect
most likely due to the increased noise between train-
ing batches and led to a slight increase in accuracy
without any other hyper-parameters being changed.
The use of decreased learning on a plateau was pre-
ferred over a learning rate scheduler as the model had
shown the ability to consistently train deep into the
epoch cycle.
Hyper-parameter Value
Epochs 200
Optimiser Adam
Learning Rate 0.0010
Batch Size 4
Early Stopping 40
Reduce LR on Plateau: Patience 10
Reduce LR on Plateau: Factor 0.5
Figure 5: Summary of hyper-parameters used across all
experiments & datasets. Reduce Learning Rate (LR) on
Plateau allows the network to autonomously adjust its learn-
ing rate according to predefined parameters.
Combined Depth and Semantic Segmentation from Synthetic Data and a W-Net Architecture
419

5 RESULTS
Segmentation and depth estimation performance re-
sults are reported in this section. All results are from
images that were taken from the same synthetic envi-
ronment as the training data, but were not used in the
training or hyper-parameter setting. Figure 6 shows
example results for a single input image. The tar-
get and predicted segmentation maps are shown along
with the predicted depth map.
5.1 Segmentation
Across full images, including easier to identify areas
such as sky, road and foliage, the model performed
at 98.9% accuracy, with a true positive rate of 90%
and a false positive rate of 0.1%. We also calculated
the accuracy on objects of interest, such as buildings,
cars and trucks, but excluding ground, sky, and fo-
liage. This produces a more realistic measure of per-
formance on useful objects. Accuracy was 95% with
a true positive rate of 88% and a false positive rate of
0.5%.
Figure 6: Example outputs from the model: (a) The input
image (b) The target segmentation map (c) Model depth es-
timation (d) Model segmentation output.
5.2 Depth
Depth estimation is treated as a classification task
where each category represents a one metre depth
zone. We can measure accuracy in terms of the per-
centage of pixels that are classified into exactly the
right depth zone. Across all pixels in the test images,
the average correct classification rate was 88.8%. The
categories are ordered, however, so we can also mea-
sure the size of any error by converting the classes to
absolute depth values. Conversion to absolute depth
values allows for an understanding of average errors
in both absolute terms and proportional to true depth.
Overall depth errors were low, with 93% of pixels
estimated within a 5% margin of error. This rose
to 95% of pixels at a 10% margin of error. For ob-
jects of interest (i.e. for pixels with segmentation la-
bels other than ‘terrain’, ‘road’ and other spatially ex-
tended items), this value was notably lower at 75%
and 88.6% of pixels within 5% and 10% margins of
error respectively. These lower values reflect the over-
all reduction in the number of pixels comprising these
objects (i.e. where misestimation of a small number
of pixels will have a larger effect on proportional val-
ues).
6 CONCLUSIONS AND FUTURE
WORK
Previous work has shown that combining depth esti-
mation and segmentation of stereo images improves
performance on both tasks and this work builds on
that by showing similar results for monocular input
images. We have also demonstrated how very high
quality training data with precise ground truth can
be produced using games technology software. The
study is small, with a limited virtual world, a small
number of different objects, and a graphics engine
that produces images that are clearly artificial. Im-
provements in graphics realism coupled with the abil-
ity to change details such as weather, season, time of
day and lighting conditions will improve the data fur-
ther. We will also need to improve the variation of de-
tail on each object, for example using different road
surfaces.
We found that the depth estimation algorithm is
able to assign the correct depth to pixels from differ-
ent instances from the same class, even when one in-
stance partly occludes the other so that their segmen-
tation maps form one continuous shape. This makes
the task of panoptic segmentation much easier as in-
stances that appear to be close in the image plane are
separated in the depth plane and can be isolated with a
simple clustering algorithm such as DBSCAN (Ester
et al., 1996). The games engine is able to generate in-
stance level labels, which may be used in future work
to develop improved panoptic depth and segmentation
algorithms.
As noted by Ranftl et. al. (Ranftl et al., 2020),
general purpose depth estimation models require a
large quantity of diverse training data. We agree
NCTA 2024 - 16th International Conference on Neural Computation Theory and Applications
420

and while there are undoubtedly improvements that
could be made to the model architecture and train-
ing regime, the single largest opportunity for model
improvement will come from generating larger and
more diverse training data sets. An important obser-
vation from the current work is that the virtual world
allows a fine level of control over the arrangement,
density and distribution of objects at various depths.
For example, we found that early data sets contained
too much road and sky, which distorted the accuracy
metrics. Later data sets contained more objects of in-
terest and produced more robust models. Future mod-
els will be trained on data that is generated in an inter-
active process, designed to create data for classes and
at depths where the network errors are largest. We be-
lieve this will allow a greater efficiency for large scale
network training.
ACKNOWLEDGEMENTS
This research was funded by DSTL.
REFERENCES
Alhwarin, F., Ferrein, A., and Scholl, I. (2014). Ir stereo
kinect: improving depth images by combining struc-
tured light with ir stereo. In Pacific Rim International
Conference on Artificial Intelligence, pages 409–421.
Springer.
Cao, Y., Wu, Z., and Shen, C. (2017). Estimating depth
from monocular images as classification using deep
fully convolutional residual networks. IEEE Transac-
tions on Circuits and Systems for Video Technology,
28(11):3174–3182.
Caron, M., Touvron, H., Misra, I., J
´
egou, H., Mairal, J., Bo-
janowski, P., and Joulin, A. (2021). Emerging prop-
erties in self-supervised vision transformers. In Pro-
ceedings of the IEEE/CVF International Conference
on Computer Vision, pages 9650–9660.
Chen, K., Pogue, A., Lopez, B. T., Agha-Mohammadi, A.-
A., and Mehta, A. (2020). Unsupervised monocular
depth learning with integrated intrinsics and spatio-
temporal constraints. In 2021 IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS),
pages 2451–2458. IEEE.
Clevert, D.-A., Unterthiner, T., and Hochreiter, S.
(2015). Fast and accurate deep network learning
by exponential linear units (elus). arXiv preprint
arXiv:1511.07289.
Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn,
D., Zhai, X., Unterthiner, T., Dehghani, M., Minderer,
M., Heigold, G., Gelly, S., et al. (2020). An image is
worth 16x16 words: Transformers for image recogni-
tion at scale. arXiv preprint arXiv:2010.11929.
Ester, M., Kriegel, H.-P., Sander, J., Xu, X., et al. (1996).
A density-based algorithm for discovering clusters in
large spatial databases with noise. In kdd, volume 96,
pages 226–231.
Goodfellow, I., Bengio, Y., Courville, A., and Bach, F., edi-
tors (2016). Deep Learning, page 193. Adaptive Com-
putation and Machine Learning Series. MIT Press,
12th floor, One Broadway, Cambridge, MA 02142.
Goutcher, R., Barrington, C., Hibbard, P. B., and Graham,
B. (2021). Binocular vision supports the development
of scene segmentation capabilities: Evidence from a
deep learning model. Journal of vision, 21(7):13–13.
Hamilton, M., Zhang, Z., Hariharan, B., Snavely, N., and
Freeman, W. T. (2022). Unsupervised semantic seg-
mentation by distilling feature correspondences. arXiv
preprint arXiv:2203.08414.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Delv-
ing deep into rectifiers: Surpassing human-level per-
formance on imagenet classification. In Proceedings
of the IEEE international conference on computer vi-
sion, pages 1026–1034.
Hibbard, P. B. (2007). A statistical model of binocular dis-
parity. Visual Cognition, 15(2):149–165.
Hibbard, P. B. and Bouzit, S. (2005). Stereoscopic corre-
spondence for ambiguous targets is affected by eleva-
tion and fixation distance. Spatial vision, 18(4):399–
411.
Kirillov, A., He, K., Girshick, R., Rother, C., and Doll
´
ar,
P. (2019). Panoptic segmentation. In Proceedings of
the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 9404–9413.
Lee, S., Kim, N., Jung, K., Hayes, M. H., and Paik, J.
(2013). Single image-based depth estimation using
dual off-axis color filtered aperture camera. In 2013
IEEE International Conference on Acoustics, Speech
and Signal Processing, pages 2247–2251. IEEE.
Li, S., Luo, Y., Zhu, Y., Zhao, X., Li, Y., and Shan,
Y. (2021). Enforcing temporal consistency in video
depth estimation. In Proceedings of the IEEE/CVF
International Conference on Computer Vision, pages
1145–1154.
Liu, X., Deng, Z., and Yang, Y. (2019). Recent progress in
semantic image segmentation. Artificial Intelligence
Review, 52(2):1089–1106.
Long, J., Shelhamer, E., and Darrell, T. (2015). Fully con-
volutional networks for semantic segmentation. In
Proceedings of the IEEE conference on computer vi-
sion and pattern recognition, pages 3431–3440.
Long, Y., Morris, D., Liu, X., Castro, M., Chakravarty, P.,
and Narayanan, P. (2021). Radar-camera pixel depth
association for depth completion. In Proceedings of
the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 12507–12516.
Mansour, M., Davidson, P., Stepanov, O., and Pich
´
e, R.
(2019). Relative importance of binocular disparity and
motion parallax for depth estimation: a computer vi-
sion approach. Remote Sensing, 11(17):1990.
Palou, G. and Salembier, P. (2012). 2.1 depth estimation of
frames in image sequences using motion occlusions.
Combined Depth and Semantic Segmentation from Synthetic Data and a W-Net Architecture
421

In European Conference on Computer Vision, pages
516–525. Springer.
Park, K., Kim, S., and Sohn, K. (2018). High-precision
depth estimation with the 3d lidar and stereo fusion.
In 2018 IEEE International Conference on Robotics
and Automation (ICRA), pages 2156–2163. IEEE.
Paul, S., Jhamb, B., Mishra, D., and Kumar, M. S. (2022).
Edge loss functions for deep-learning depth-map. Ma-
chine Learning with Applications, 7:100218.
Ranftl, R., Lasinger, K., Hafner, D., Schindler, K., and
Koltun, V. (2020). Towards robust monocular depth
estimation: Mixing datasets for zero-shot cross-
dataset transfer.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation. In International Conference on Medical
image computing and computer-assisted intervention,
pages 234–241. Springer.
Simoncelli, E. P. (2003). Vision and the statistics of the
visual environment. Current opinion in neurobiology,
13(2):144–149.
Su, W., Zhang, H., Li, J., Yang, W., and Wang, Z. (2019).
Monocular depth estimation as regression of classifi-
cation using piled residual networks. In Proceedings
of the 27th ACM International Conference on Multi-
media, pages 2161–2169.
Tian, D., Han, Y., Wang, B., Guan, T., Gu, H., and Wei,
W. (2021). Review of object instance segmentation
based on deep learning. Journal of Electronic Imag-
ing, 31(4):041205.
Tran, S.-T., Cheng, C.-H., Nguyen, T.-T., Le, M.-H., and
Liu, D.-G. (2021). Tmd-unet: Triple-unet with multi-
scale input features and dense skip connection for
medical image segmentation. In Healthcare, vol-
ume 9, page 54. Multidisciplinary Digital Publishing
Institute.
Wang, T., Liu, B., Wang, Y., and Chen, Y. (2017). Re-
search situation and development trend of the binoc-
ular stereo vision system. In AIP Conference Pro-
ceedings, volume 1839, page 020220. AIP Publishing
LLC.
Yang, Z. and Purves, D. (2003). A statistical explanation of
visual space. Nature neuroscience, 6(6):632–640.
Zhou, Z., Siddiquee, M. M. R., Tajbakhsh, N., and Liang, J.
(2019). Unet++: Redesigning skip connections to ex-
ploit multiscale features in image segmentation. IEEE
transactions on medical imaging, 39(6):1856–1867.
NCTA 2024 - 16th International Conference on Neural Computation Theory and Applications
422
