
Elevator Passenger Abnormal Behavior Recognition Method Based
on Digital Twin
Xiaolin Li and Yaohui Song
*
School of Communications and Information Engineering, Chongqing University of Posts and Telecommunications,
Chongqing 400065, China
Keywords: Digital Twins, Posture Recognition, Bone Extraction, YOLOv7-OpenPose.
Abstract: Aiming at the lack of abnormal behavior dataset and scarcity of samples of elevator passengers, a method
based on digital twin is proposed by this paper to build a vertical elevator passenger abnormal behavior
detection platform and realize the virtual and real mapping of elevator operation status and passenger
behavior. The digital twin scene is combined with the theory of human behavior modeling to enhance the
abnormal behavior of passengers and provide sufficient abnormal behaviour data sources. In order to solve
the problem of confusion between passengers and car background caused by the small range of elevator
monitoring and reduce the accuracy of feature extraction, YOLOv7-OpenPose is used by this paper to
obtain human bone features, which improves the recognition accuracy on the premise of ensuring the
recognition speed, and realizes the rapid recognition of passengers' abnormal behaviors fused with twin
data. Experimental results show that the proposed method not only demonstrates the feasibility, efficiency
and security of digital twin technology in the creation of abnormal data, but also reflects the superiority of
the improved algorithm in pose recognition.
1 INTRODUCTION
Elevator safety is closely related to public safety,
according to the public data of the State
Administration for Market Regulation on national
special equipment, by the end of 2022, the number
of elevators in China has reached 9.6446 million.
Due to the small and closed space of the elevator
car, the passenger dynamics cannot be controlled,
and a series of safety problems such as door
opening, falling, and blocking of cameras are prone
to occur, so the research on the abnormal behavior
of elevator passengers is of great significance.
At present, there is an endless stream of research
on the abnormal behavior of elevator passengers. Lv
et al. (Lv, 2021) used the YOLOv3 algorithm and
the AlphaPose algorithm to collect and extract
elevator passenger behaviors, and used SVM and
neural networks to classify different abnormal
behaviors. Shi et al. (Shi, 2021) used the OpenPose
algorithm to extract the key nodes of the key frame
sequence, obtain the spatial information of the target
behavior, and identify the human behavior in the
elevator car. Feng et al. (Feng, 2021) proposed a
detection method of machine vision and multi-
feature fusion for elevator passenger falls. Wang et
al. (Wang, 2018) used Lucas-Kanade optical flow to
design a passenger abnormal behavior detection
system in the elevator car based on video
recognition technology. Reinsalu et al. (Robal, 2023)
proposed a method for identifying unsafe behaviors
of car passengers based on deep learning and a fault
warning method for brakes and control cabinets
based on infrared spectrum analysis to identify
abnormal behaviors online. Yu and Sun et al. (Yu,
2020), (Sun, 2019) proposed abnormal behavior
detection models based on optical flow method and
angular kinetic energy for the fighting behavior in
the elevator car, respectively.
However, in the process of model training,
testing, and validation, the datasets in the above
studies are insufficient. The traditional elevator
abnormal behavior sample data came from real
human movements and the construction of human
physical models (Yuan, 2020), (Fuller, 2023),
respectively. For datasets created with real human
actions, the execution process has security risks and
requires high time and equipment costs. For the
construction of human body physical models, the
model has fixed actions and lacks real-time and
Song, Y. and Li, X.
Elevator Passenger Abnormal Behavior Recognition Method Based on Digital Twin.
DOI: 10.5220/0012887900004536
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Data Mining, E-Learning, and Information Systems (DMEIS 2024), pages 87-93
ISBN: 978-989-758-715-3
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
87
flexibility. The emergence of digital twins provides
a solution to the above problems. The interaction
between the digital twin model and the digital twin
data (Saravanan, 2022) can not only realize the
driving and updating of the digital twin model, but
also support the storage, update and fusion of the
digital twin data. On the one hand, it can realize the
real human-computer interaction process (Amara,
2023), so as to realize the real-time monitoring of
the scene in the elevator. And on the other hand, it
can use the high-fidelity twin scene to reproduce the
abnormal behavior of various passengers, which can
not only ensure the safety of personnel and property
and save equipment costs, but also provide sufficient
data sets for model testing and verification for the
expansion of sample data.
In summary, a method based on digital twins is
proposed by this paper to establish a vertical
elevator passenger behavior detection model. This
method builds a digital twin of elevator passenger
behavior monitoring and a human behavior twin
model, and enhance the abnormal behavior data of
elevator passengers. It provides a large amount of
twin data for the identification of abnormal
behaviors of elevator passengers. For the recognition
of abnormal behaviors, this paper uses the YOLOv7-
OpenPose algorithm to extract features and
iteratively learn from the twin data, so as to realize
the efficient recognition of passengers' abnormal
behaviors.
2 CONSTRUTION OF VERTICAL
ELEVATOR PASSENGER
BEHAVIOR MONITTORING
PLATFORM
2.1 Design of a Digital Twin Framework
for Elevator Passenger Behavior
Monitoring
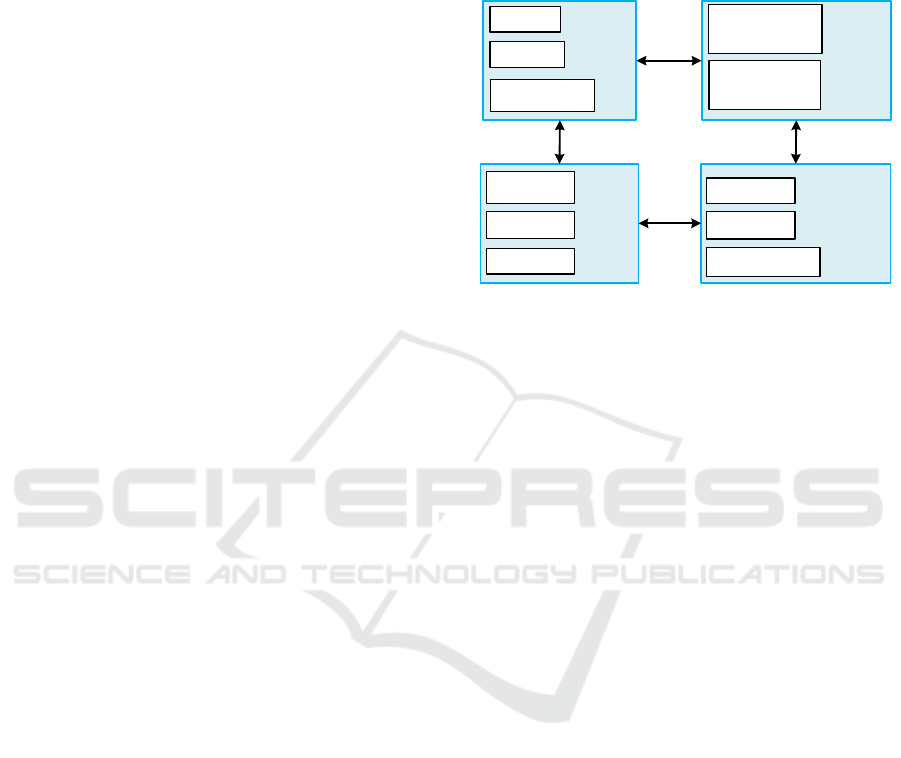
Referring to the five-dimensional model architecture
of digital twin proposed by He et al. (He, 2020), this
paper builds a framework for the digital twin vertical
elevator passenger behavior monitoring platform, as
shown in Figure 1, which is divided into four layers,
namely the physical layer, the interaction layer, the
virtual layer and the application layer.
(1) Physical layer: The physical layer contains
all kinds of hardware physical entities for elevator
operation, and the main hardware equipment
includes elevator car, camera in the car, elevator
attitude sensor, etc., which are combined into scene
monitoring entities, and ordinary sensors are
responsible for collecting elevators static data, such
as geometric dimensions, car status, etc., attitude
sensors are responsible for collecting passenger
behavior information.
Monitoring and
management
Elevator
Elevator Attitude
Sensor
Camera
Video Analysis
Server (Attitude
Monitoring Port)
Elevator Control
Cabinet (Elevator
Physical Data)
Physical
layer
Interaction
layer
Virtual
layer
Twin data
Model of Abnormal
Passenger Behavior
Elevator status
model
Application
layer
Visual
interface
Statistics
Alert
notifications
Perceptual
access
Algorithm
deployment
Data-driven
Data
support
Figure 1: Elevator passenger behavior monitoring digital
twin framework.
(2) Interaction layer: The interaction layer is
mainly composed of elevator control cabinet and
video analysis server. As the connection layer
between the physical entity and the twin, the
interaction layer can not only use the edge controller
to convey the instructions of the elevator system, but
also upload the simulation data to the video analysis
server for model training, and at the same time
transmit all kinds of collected data to the virtual
layer to drive the call of the twin model and the
interaction of the twin data.
(3) Virtual layer: As the data combination of
physical entities, the virtual layer contains all the
space, attributes and management data of the
physical layer, and stores, transmits, expresses and
deepens them, mainly by means of new technologies
such as digital modeling, Internet of Things, and
artificial intelligence. The twin model is mainly
composed of an elevator state model and a human
behavior model. With the help of virtual and real
interaction technology, the elevator state model
integrates real-time information of elevator
equipment on the basis of the digital model to realize
the real-time monitoring of the operation status of
elevator equipment. The human behavior model uses
video data to realize the virtual and real mapping of
real passenger human behavior, and at the same
time, the digital twin character model creates a large
amount of abnormal behavior data. The twin data
comes from the physical layer and the virtual layer,
the data of the physical layer is used to drive the
twin model, and the data supply of the virtual layer
is called by the layer and the interaction layer.
DMEIS 2024 - The International Conference on Data Mining, E-Learning, and Information Systems
88
(4) Application layer: The application layer
directly serves the staff, including the visualization
of the twin interface and the operation functions of
safety warning, and displays the elevator status and
the elevator passenger status in real time, so as to
realize the three-dimensional dynamic supervision of
elevator equipment and passenger behavior. It
mainly uses UI design and three-dimensional
visualization technology, and connects to the
communication system at the same time, so that
elevator passengers can take rescue actions in the
first time in case of safety accidents.
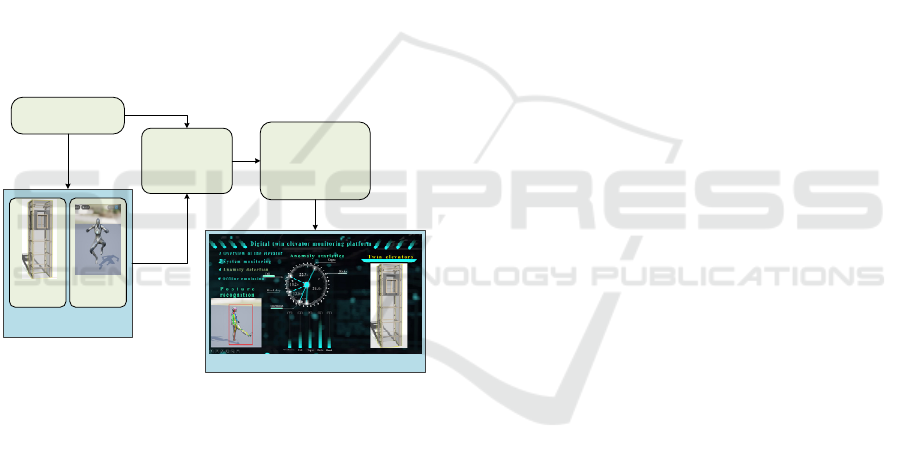
2.2 Construction of Digital Twin Scene
for Passenger Behavior Monitoring
The vertical elevator passenger behavior monitoring
digital twin platform was built in Unreal Engine 5
(UE5 Unreal Engine), as shown in Figure 2, which is
divided into three steps: geometric model drawing,
twin scene construction, and virtual and real
mapping.
Visual service platform
Device state
model
Human
behavior
model
Digital twi n g eome tr y
UE5 Unreal Engine(Actors,
Charts, Fonts, etc)
+
Blueprint, C++, C# compilation
Physical Entities: Elevators,
Passengers
Twin data
mapping
Figure 2: Construction of digital twin scene for elevator
passenger behavior monitoring.
2.2.1 Geometric Model Drawing
The geometric model is drawn according to the
physical entity behavior rules and each system, and
the elevator model is drawn by SolidWorks,
including eight systems: drag system, car, weight
balance system, power system, door system and
safety protection. The character model was drawn in
Maya and had to be drawn with a skeletal mesh to
reflect the real human behavior.
2.2.2 Twin Scene Building
Import the above geometry into UE5 and assemble it
according to the inclusion relationship in the
physical world. When building a scene, pay attention
to redefining material properties, hierarchical
relationships, motion constraints, and so on. Ensure
that the movement of the twin in the twin scene is
consistent with the physical world.
2.2.3 Virtual-Real Data Mapping
Twin data is the key to real-time mapping of
physical entities and twins. In this paper, the
elevator status data is obtained through the RS485
communication bus between the external interface
board and the elevator control cabinet, and stored in
the corresponding MySQL data for driving the twin.
Passenger behavior data includes video data and
passenger attitude information, wherein passenger
attitude information is obtained by using the
YOLOv7-OpenPose algorithm proposed in this
paper on the video analysis server, and sent to the
client through TCP network protocol and Socket
communication, and the client can realize the
construction of visualization platform services by
using C++ and BluePrint to parse and distribute the
input data.
3 IDENTIFICATION OF
ABNORMAL PASSENGER
BEHAVIOR FUSED WITH
TWIN DATA
3.1 Passenger Abnormal Behavior
Modelling and Data Augmentation
Abstracting the human skeleton into a collection of
several bones and joint points can not only reduce
the complexity of constructing a complete human
behavior model, but also the human bone structure is
similar, and the human behavior can also be
described using the position information of these
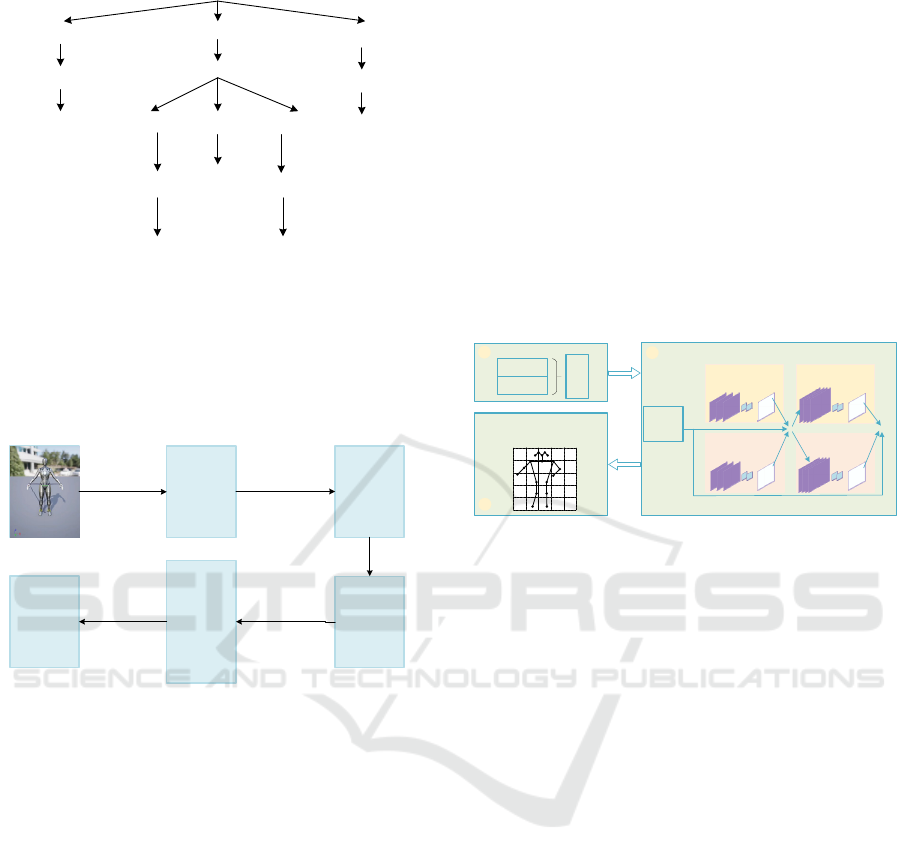
joints. As shown in Figure 3, The traditional 3D
coordinate description method makes the position
parameters of each joint point independent of each
other during the movement. It violates the constraint
that the skeleton length of the mannequin remains
unchanged, so this paper directly uses a hierarchical
method to equivalence the mannequin to the joint
tree shown in the figure above. The root node of the
tree is used as the geometric center of the human
skeleton model to control the overall displacement
and direction of the model. The remaining sub-nodes
are indirectly or directly connected to the root node
to assist in the determination of the posture of the
mannequin and the presentation of the movement
process (Han, 2020).
Elevator Passenger Abnormal Behavior Recognition Method Based on Digital Twin
89
Root
R_Hip
Pelvis
L_Hip
R_Knce
R_Ankle
L_Knce
L_Ankle
Chest
Neck
R_shouder
L_shouder
Head
R_Elbow L_Elbow
R_Wrist R_Wrist
Figure 3: Human joint tree.
As shown in Figure 4, after equating the human
skeleton to a joint tree, the movement of the whole
human body can be described in detail by means of
forward kinematics and inverse kinematics
(Moharkan, 2023).
Move bone
points to
generate
keyframe
actions
Bone retargeting
Solve for
refined bone
data between
adjacent
keyframes
Inverse kinematics
Generate
multiple sets
of action
sequences
Positive kinematics
The state
machine
integrates
multiple sets
of actions
into a
character
State integration
Twin scenes
reproduce the
action
Event triggering
Figure 4: Digital twin-based passenger anomaly modelling
process.
Among them, after the displacement and rotation
of each joint relative to its parent joint are known,
the posture of the whole human body after
movement can be solved by using positive
kinematics. With the initial and ending human
posture known, inverse kinematics can be used to
solve for specific changes in each joint during the
movement process.
Through forward and reverse kinematic behavior
modeling, various dangerous posture actions can be
created for the twin model to operate, because the
abnormal behavior recognition research of machine
learning requires a large amount of video image
data. In the process of acquisition, the frame rate
output of the CameraActor is set to 30frame/s, the
resolution is set to 1920×1080, the image output
format is video sequence (avi), the angle is set to the
horizontal plane of the parallel car roof, and the four
virtual cameras are recorded at the same time
through the control command. Data enhancement is
carried out for abnormal behaviors such as jumping,
falling, kicking, and hand-picking doors in the
elevator.
3.2 Human Bone Detection Based on
YOLOv7-OpenPose
Aiming at the lack of abnormal behavior cases and
insufficient datasets in real life, the abnormal
behavior modeling of passengers based on digital
twins can provide a large number of training and test
samples for abnormal posture and behavior. In this
paper, we propose a passenger abnormal behavior
recognition model fused with twin data, and the
overall framework diagram of the model is shown in
Figure 5.
Input
Real video
Twin video
Image
sequence
Skeleton extraction by Yolo-OpenPose
VGG-19
+
Yolo
Backbone
Branch1,Stage_1
1
ρ
1
S
Branch1,Stage_t
t
S
t
ρ
Branch2,Stage_1
1
ϕ
1
L
Branch2,Stage_t
t
L
t
ϕ
⊕⊕
Feature
Decoupled into2D skeleton,
Preprocessing feature and get
Skeleton sequence
0
-0.2
0.2
0.4
-0.4
-0.6
A
B
C
Figure 5: Bone extraction of passenger abnormal behabior
fused with twin data.
The video data of passenger abnormal behavior
collected in practice and the twin data of passenger
abnormal behavior constructed in 2.1 were
processed into image sequences, and the skeletal
posture of the human body was extracted by the
YOLOv7-OpenPose algorithm.
OpenPose, as a classical pose extraction
algorithm, has a multi-stage, supervised
convolutional neural network (Moharkan, 2023),
which is widely used in human behavior recognition,
and its overall structure is shown in B of Figure 5.
First, the feature map is extracted through the
backbone
F
. Secondly, it inputs this map into
Branch1 and Branch2 of the first stage Stage_1. And
then it obtains the 2D confidence map of the joint
point
1
S and the partial affinity domain
1
L
respectively. Finally, it makes
F
,
1t
S
−
and
1t
L
−
as
the input of the next stage Stage_
t ( 2t ≥ ), and
perform multiple iterations. The inputs and outputs
of Branch1 and Branch2 at different stages are
shown in Eq. (1).
11
11
(, , ), 2
(, , ), 2
tt tt
tt tt
SFSLt
LFSLt
ρ
ϕ
−−
−−
=∀≥
=∀≥
(1)
, where
t
ρ
and
t
ϕ
, represent the network
relationship between the 2D confidence graph and
DMEIS 2024 - The International Conference on Data Mining, E-Learning, and Information Systems
90

partial affinity domain of the t stage and the feature
map, 2D confidence graph and partial affinity
domain of the stage
1t − , respectively. Through the
continuous iteration of the above multi-stage
convolutional neural network, the more joint points
of the human body are obtained. For the position
1
j
d and
2
j
d of any two joint points, the confidence
degree of the joint point pair needs to be
characterized by calculating the linear integral of the
partial affinity domain by Eq. (2). At last, it selects
the joint with the highest confidence to complete the
splicing, and gets the skeletal posture of the whole
human body.
1
21
0
21
12
(())
() (1 )
u
jj
cu
u
jj
jj
dd
ELpu d
dd
pu ud ud
=
=
−
=×
−
=− +
(2)
, where
c
L represents a partial affinity domain for a
pair of joint points.
Although the OpenPose algorithm has the
advantages of fast recognition speed and high
accuracy in large scenarios. However, the scope of
elevator monitoring is small, which is easy to cause
confusion between passengers and the car
background and reduce the accuracy of feature
extraction. So it is necessary to consider more
dependencies between deep and shallow networks to
capture more details and textures. VGG-19 (Wen,
2019) is the feature extraction network of the
OpenPose algorithm, and the continuous iteration of
the convolutional network makes the significance of
the feature map continuously decrease. Therefore, in
order to better extract the skeletal features of
passengers in the car environment, this paper
improves the traditional VGG-19 and proposes a
skeletal point detection algorithm for elevator
passengers based on YOLOv7-OpenPose. The
backbone network structure of the algorithm is
shown in Figure 6.
This structure uses the YOLOv7 object detection
model to extract abnormal passenger targets. The
YOLOv7 series uses both object detection and
object classification, and its object detection layer of
the 79th layer 13*13 detection network and the
object detection layer of the 91-layer 26*26
detection network are both convolutional layers, and
only feature extraction is performed on the target.
The specific position, bounding box and confidence
level of the target are obtained through the object
detection network of YOLOv7, which is placed
before the third Maxpool layer in the VGG-19
network as input. And then the output tensor of the
whole object detection is spliced with the output
tensor of the original Maxpool layer as the input
tensor of the next layer and the bone extraction is
continued.
4 EXPERIMENTAL RESULTS
AND ANALYSIS
4.1 Experimental Environment
This experiment adopts Unreal Engine 5.3.2 under
Windows 10 operating system, TensorFolw
framework, Core i9-10980XE processor, 128G
79
91
Yolov7 Object detection model
Conv3-64
Conv3-128
Conv3-256
Conv3-512
Maxpool
CSPNet
Upsampling Layer
OpenPose model OpenPose model
Figure 6: YOLOv7-openpose algorithm backbone.
Elevator Passenger Abnormal Behavior Recognition Method Based on Digital Twin
91
memory, Core i7-11400F processor, 32G memory,
Nvidia RTX 3080 graphics processor and Nvidia
RTX3060 graphics processor.
4.2 Dataset
The experiments were performed on a custom
elevator passenger abnormal behavior dataset and a
COCO2017 dataset. Among them, the COCO2017
dataset is used to test the YOLOv7-OpenPose bone
point detection algorithm in this paper. The dataset
contains a total of 163957 images of the training,
validation, and test sets, and each image is labeled
with 18 bone points of the human body.
By capturing and merging the videos in the real
scene and the twin scene at a rate of 30 frames per
second, the custom passenger abnormal behavior
dataset shown in Table 1 is formed.
Table 1: Customize the Passenger Abnormal Behavior
Dataset.
Action type
The amount of
real data
The amount of
virtual data
Total
Caper 28 2023 20510
Hand chop 47 2028 2075
Kicks 66 2047 2113
Fall 20 2011 2031
Total 161 8109 8270
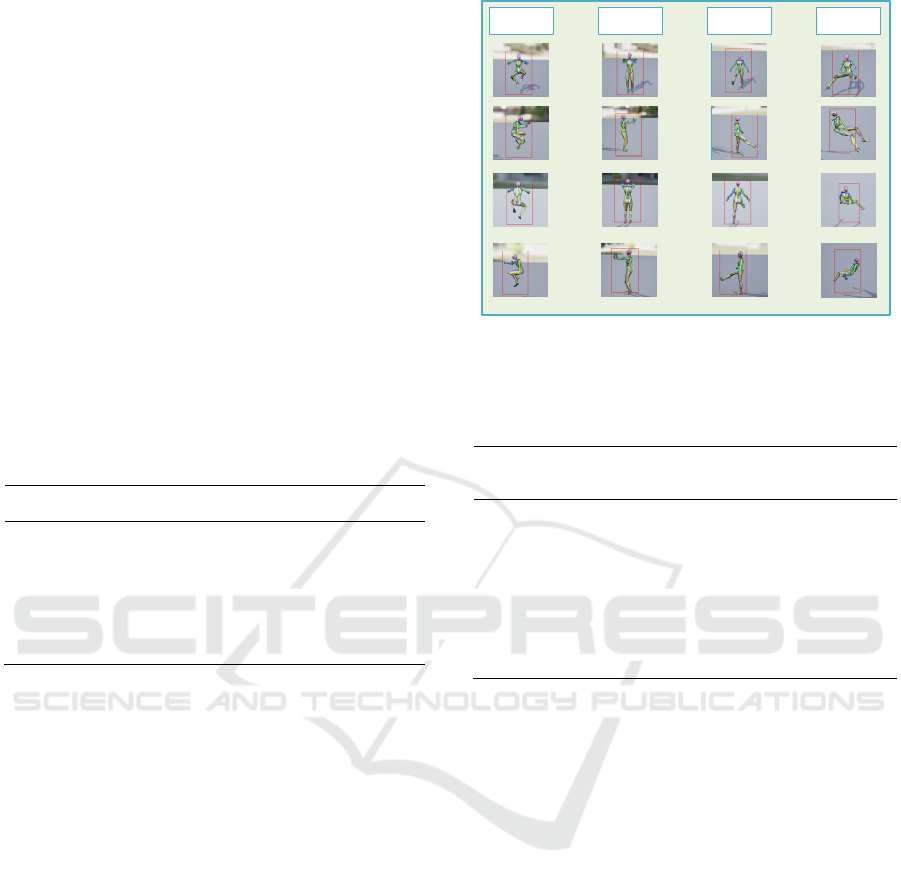
4.3 Human Skeletal Point Detection
Analysis
Human skeleton detection based on YOLOv7-
OpenPose is not only the key link to obtain
passenger posture information in the real
environment, but also the core content of obtaining
passenger abnormal behavior dataset. For the
abnormal behaviors of various passengers
constructed in the twin scene, the skeletal point
detection results are shown in Figure 7.
4.4 Comparison of the Performance of
the YOLOv7-OpenPose Algorithm
In order to verify the accuracy and real-time
performance of the YOLOv7-OpenPose bone
detection algorithm, the performance of the text was
compared with the classical OpenPose algorithm on
the COCO dataset, and the performance of different
series of YOLO algorithms was analyzed. The
experimental results are shown in Table 2.
Caper Hand chop Kicks Fall
Figure 7: Bone diagnosis of abnormal passenger behavior
based on twin data.
Table 2: Comparison of the performance of different
networks on the COCO test set.
The type of
algorithm
OpenPose
OpenPose
+
YOLOv5
OpenPose
+
YOLOv7
OpenPose
+
YOLOv8
AP 0.701 0.728 0.734 0.741
AP
50
0.854 0.871 0.882 0.845
AP
75
0.711 0.722 0.736 0.709
AP
M
0.695 0.714 0.719 0.725
AP
L
0.774 0.776 0.779 0.785
Time-
consumed
/
s
21341 23448 22154 25243
Where AP is the mean index of average accuracy.
AP
50
and AP
75
represent the joint point predictors
with thresholds of 0.50 and 0.75, respectively, AP
M
and AP
L
represent the predictors of small and large
human body size, respectively. Time-consumed is
the test time consumed by the algorithm on the
experimental platform in this paper, which is used to
characterize the algorithm complexity. Comparing
the accuracy and time complexity of each model in
Table II, it can be seen that the AP
50
and AP
M
prediction indicators of YOLOv7-OpenPose perform
the best among the above algorithms. Compared
with the original model OpenPose, the accuracy
indicators of YOLOv7-OpenPose are improved and
the amplitude is about 4%, and the introduction of
the YOLOv7 module does not have a great impact
on the time complexity of the overall YOLOv7-
OpenPose algorithm. The average processing time of
the algorithm is still close to that of the original
OpenPose algorithm, which can meet the real-time
requirements.
DMEIS 2024 - The International Conference on Data Mining, E-Learning, and Information Systems
92

5 CONCLUSIONS
In order to solve the problem of lack of a large numb
er of samples in the research on abnormal behavior r
ecognition based on machine learning caused by the
scarcity of abnormal behavior data of elevator passe
ngers, this paper builds a digital twin scenario for m
onitoring abnormal behavior of passengers in vertica
l elevators. Based on the human skeleton model and
kinematics principle, the abnormal behavior data wa
s constructed, and a total of 8270 twin actions were
provided for abnormal behavior recognition, and fin
ally the improved YOLOv7-OpenPose human skelet
on detection algorithm was used. The experimental r
esults show that the accuracy of the model is improv
ed by about 4% on the basis of the original model O
penPose, and the model does not significantly increa
se the time complexity in terms of real-time, which s
olves the problem of low feature extraction rate caus
ed by the confusion between passengers and car bac
kground and the trade-off between real-time and acc
uracy. The modeling and recognition of abnormal be
haviors proposed in this paper have the characteristic
s of high accuracy, strong real-time performance and
good interactivity. In the future, further research wil
l be carried out on the abnormal behavior of multiple
people in complex scenes in the elevator.
REFERENCES
Lv, X., Wang, S. and Chen, T., 2021. Human gait analysis
method based on sample entropy fusion AlphaPose alg
orithm. 2021 33rd Chinese Control and Decision Conf
erence (CCDC). pp.1543-1547. IEEE. doi: 10.1109/C
CDC52312.2021.9602427.
Shi, D., Zhu, W. and Cheng, R., 2022. Human Fall Detecti
on Algorithm Based on YoloX-s and Lightweight Ope
nPose. 2022 15th International Conf. on Advanced Co
mputer Theory and Engineering (ICACTE). pp. 23-28.
IEEE. doi: 10.1109/CCDC52312.2021.9602427.
Feng, S., Niu, K. and Liang, Y., 2021. Research on elevato
r intelligent monitoring and grading warning system. I
EEE International Conf. on Computer Science, Electr
onic Information Engineering and Intelligent Control
Technology (CEI). pp. 145-148. IEEE. doi: 10.1109/C
EI52496.2021.9574579.
Wang, Z., Yang, X., 2018. Moving target detection and tra
cking based on Pyramid Lucas-Kanade optical flow.20
18 IEEE 3rd International Conference on Image, Visio
n and Computing (ICIVC). pp. 66-69. IEEE. doi: 10.11
09/ICIVC.2018.8492786.
Reinsalu, U., Robal, T., 2023. A Touch-Free Service Butto
n for Smart Elevator Operation with Dynamic QR-cod
e Generation. 2023 12th Mediterranean Conference on
Embedded Computing (MECO). pp. 1-4. IEEE. doi: 1
0.1109/MECO58584.2023.10155102.
Yu, L., Wang, Y. and Li, J., 2020. Algorithm of Detecting
Abnormal Behavior Based on Optical Flow Method. 2
020 2nd International Conference on Information Tec
hnology and Computer Application (ITCA). pp. 191-1
93. IEEE. doi: 10.1109/ITCA52113.2020.00047.
Sun, Z., Xu, B. and Lu, M., 2019. A real-time video survei
llance and state detection approach for elevator cabs. 2
019 International Conference on Control, Automation
and Information Sciences (ICCAIS). pp. 1-6. IEEE. doi
: 10.1109/ICCAIS46528.2019.9074707.
Yuan, R., Zhang, Z. and Song, P., 2020. Construction of vi
rtual video scene and its visualization during sports tra
ining. IEEE Access. vol. 8, pp. 124999-125012. IEEE.
doi: 10.1109/ACCESS.2020.3007897.
Kyrollos, D., Fuller, A. and Greenwood, K., 2023. Under t
he cover infant pose estimation using multimodal data.
IEEE Transactions on Instrumentation and Measurem
ent. vol. 72, no. 5007212, pp. 1-12. IEEE. doi: 10.110
9/TIM.2023.3244220.
Saravanan, S., Muthusenthil, B. and Gurusubramani, S., 2
022. A review of digital twin leveraging technology, c
oncepts, tools and industrial applications. 2022 1st Inte
rnational Conf. on Computational Science and Techno
logy (ICCST). pp. 742-748. IEEE. doi: 10.1109/ICCST
55948.2022.10040359.
Amara, K., Kerdjidj, O. and Ramzan, N., 2023. Emotion R
ecognition for Affective human digital twin by means
of virtual reality enabling technologies. IEEE Access. vol.
11,pp.74216-74227,doi:10.1109/ACCESS.2023.3285398
He, Z., Yuan, T. and Li, X., 2022. Research on Data Transf
er Scheme of Virtual-Real Interactive in Five-Dimensio
nal Digital Twin System. 2022 IEEE 8th International
Conf. on Computer and Communications (ICCC). pp. 23
39-2344. IEEE. doi:10.1109/ICCC56324.2022.10066033.
Han, B., Jiao, Y. and Liu, G., 2020. Kinematic & dynamic
models of human lower extremity during the gait cycl
e. 2020 6th International Conference on Control, Auto
mation and Robotics (ICCAR). pp. 568-573. IEEE. do
i: 10.1109/ICCAR49639.2020.9108090.
Moharkan, M. J., 2023. Comprehensive Survey on Human
Motion Tracking System. 2023 2nd International Con
ference on Automation, Computing and Renewable Sys
tems (ICACRS). pp. 1380-1387. IEEE. doi: 10.1109/I
CACRS58579.2023.10405344.
Wen, L., Li, X., 2019. A new transfer learning based on V
GG-19 network for fault diagnosis. 2019 IEEE 23rd In
ternational Conf. on Computer Supported cooperative
work in design (CSCWD). pp. 205-209. IEEE. doi: 10.
1109/CSCWD.2019.8791884.
Elevator Passenger Abnormal Behavior Recognition Method Based on Digital Twin
93
