
Randomized Local Search for Two-Dimensional Bin Packing and a
Negative Result for Frequency Fitness Assignment
Rui Zhao
1 a
, Zhize Wu
1 b
, Daan van den Berg
2 c
, Matthias Th
¨
urer
3 d
, Tianyu Liang
1 e
,
Ming Tan
1 f
and Thomas Weise
1 g
1
Institute of Applied Optimization, School of Artificial Intelligence and Big Data, Hefei University, Jinxiu Dadao 99, Hefei,
230601, Anhui, China
2
Department of Computer Science, Vrije Universiteit Amsterdam, De Boelelaan 1111, Amsterdam, 1081 HV,
The Netherlands
3
Professur Fabrikplanung und Intralogistik, TU Chemnitz, Str. der Nationen 62, 09111 Chemnitz, Sachsen, Germany
Keywords:
Two-Dimensional Bin Packing, Randomized Local Search, Frequency Fitness Assignment, Cutting Stock
Problem.
Abstract:
We consider a two-dimensional orthogonal bin packing problem (2BP) where rectangular items are to be
placed into rectangular bins such that their edges are parallel to those of the bins with the aim to require
as few bins as possible. Two variants of the problem are analyzed. In the 2BP|O|F, the items have a fixed
orientation while in the 2BP|R|F, they can be rotated by 90 degrees. We show that on both variants, a simple
randomized local search (RLS) has surprisingly good performance – if the objective function guiding the
search is defined suitably. In particular, on the 2BP|O|F, the RLS performs on par with more complicated
state-of-the-art metaheuristics. We furthermore investigate plugging Frequency Fitness Assignment (FFA)
into the RLS, obtaining the FRLS. FFA has improved the RLS performance on several classical N P-hard
optimization problems from operations research, including Max-SAT, the Job Shop Scheduling Problem, and
the Traveling Salesperson Problem. This paper is the first negative result for FFA: it cannot improve algorithm
performance on the 2BP variants studied. This can be explained by the fact that RLS already performs very
well on the instances of the 2DPackLib benchmark set used as the basis of our experiments.
1 INTRODUCTION
Cutting stock problems (CSPs) and bin packing prob-
lems (BPs) are two closely related domains of oper-
ations research (Lodi et al., 2002; Iori et al., 2021).
CSPs ask for dividing larger chunks of material into
smaller pieces, whereas BPs require us to place
smaller items into larger containers. In many cases,
variants of both problems can be trivially transformed
into each other. Their two-dimensional orthogonal
variants, which we here jointly refer to as 2BPs,
have many important applications, ranging from ob-
a
https://orcid.org/0009-0002-2426-9453
b
https://orcid.org/0000-0001-7416-5711
c
https://orcid.org/0000-0001-5060-3342
d
https://orcid.org/0000-0002-2705-969X
e
https://orcid.org/0009-0004-3732-4831
f
https://orcid.org/0009-0004-3851-053X
g
https://orcid.org/0000-0002-9687-8509
vious tasks such as packing and layout to scheduling
and build formation in additive manufacturing (Pinto
et al., 2024; Li and Zhang, 2018). The goal of solving
a 2BP is to pack a set of rectangular items into as few
as possible rectangular bins. While several exact al-
gorithms for this purpose have been developed (Ma
and Zhou, 2017; Cid-Garcia and Rios-Solis, 2020;
van den Berg et al., 2016; Braam and van den Berg,
2022; Martello and Vigo, 1998; Iori et al., 2021), they
can only be one part of the answer to the 2BP due to
its N P -hard nature (Lodi et al., 2002). As a result,
several heuristic algorithms have been applied to this
problem family, ranging from one-shot constructive
heuristics (Wong and Lee, 2009; Liu and Teng, 1999;
Pejic and van den Berg, 2020) over tabu search (Lodi
et al., 2004), evolutionary (Kierkosz and Luczak,
2013; Liu and Teng, 1999; Gonc¸alves and Resende,
2013; Lee, 2008; Li et al., 2021), and memetic algo-
rithms (Blum and Schmid, 2013; Parre
˜
no et al., 2010)
Zhao, R., Wu, Z., van den Berg, D., Thürer, M., Liang, T., Tan, M. and Weise, T.
Randomized Local Search for Two-Dimensional Bin Packing and a Negative Result for Frequency Fitness Assignment.
DOI: 10.5220/0012888500003837
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Joint Conference on Computational Intelligence (IJCCI 2024), pages 15-26
ISBN: 978-989-758-721-4; ISSN: 2184-3236
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
15

to hyper-heuristics (Beyaz et al., 2015; Terashima-
Mar
´
ın et al., 2007).
We build on the recent work (Zhao et al.,
2024), where it was shown that a randomized local
search (RLS) can perform surprisingly well on a vari-
ant of the 2BP where item rotation is permitted, if the
objective function is defined appropriately. The first
contribution of this paper is to significantly expand
upon these results and to show that the same RLS can
be even more competitive to the related work on the
2BP if item rotation is not permitted. In other words,
we find that two important variants of the 2BP can
already be solved quite well with relatively simple al-
gorithms.
As our related work study in Section 3 shows,
many of the existing works on the 2BP provide re-
sults that are either normalized with different lower
bounds, are always averaged over several instances,
or use different benchmark instances. The second
contribution of our work therefore is to provide
a complete set of results on the recently published
2DPackLib benchmark (Iori et al., 2022), including
the discovered packings, the complete progress over
the runtime, and the algorithm implementations in an
immutable archive at https://doi.org/10.5281/zenodo.
13324219, to serve as basis for future research.
All of the metaheuristic algorithms for the 2BP
share the common concept that they iteratively sample
new solutions s
n
based on the currently retained solu-
tions s
c
and that they tend to retain the new solution
if it is better (or, at least, not worse) than s
c
. They
may maintain populations of solutions (e.g., evolu-
tionary algorithms) or introduce some diversity or ex-
ploration criterion (e.g., tabu search), but over time,
better solutions are preferred over worse ones. There
are only three iterative optimization algorithms free
of such bias: random sampling, random walks, and
exhaustive enumeration.
In (Weise et al., 2014b), a fourth optimization ap-
proach without bias towards good solutions was intro-
duced, Frequency Fitness Assignment (FFA), but its
theoretical properties were proven only relatively re-
cently (Weise et al., 2021b; Weise et al., 2023). FFA
is not an algorithm itself, but a module that can be
plugged into a wide range of iterative heuristics. It
then renders them invariant under all injective trans-
formations of the objective function value. It prefers
new solutions s
n
if they have a previously less fre-
quently encountered objective value z
n
= f (s
n
), re-
gardless of whether they are better or worse.
Despite this unbiasedness, FFA yields remarkable
performance on several classical N P -hard optimiza-
tion problems such as Max-SAT (Weise et al., 2021b;
Weise et al., 2023), the Job Shop Scheduling Prob-
lem (JSSP) (Weise et al., 2021a; de Bruin et al., 2023),
and on the Traveling Salesperson Problem (Liang
et al., 2022; Liang et al., 2024, TSP). Experiments
support that FFA-based algorithms tend to find better
solutions than the objective-guided counterparts into
which they are plugged if the problem they are ap-
plied to does not have too many different objective
values (Liang et al., 2022; Liang et al., 2024).
Since the possible range of the number of bins into
which the items in a 2BP can be packed is usually
small (Zhao et al., 2024), the 2BP might be another
classical N P-hard problem where FFA could excel.
As the third contribution, we explore this idea by
plugging FFA into the RLS, yielding the FRLS, and
applying it to all the 2DPackLib instances. We find
that FRLS cannot outperform the RLS on the 2BP.
This is the first completely negative result for FFA
on any classical optimization task. However, when
analyzing the performance of RLS and FRLS in more
detail, the reasons for this discrepancy become clear.
The fourth contribution of our work is that we
identify the need for harder benchmark instances
based on reproducible results: RLS should not per-
form well on N P-hard problems, but it does so any-
way in our experiments on the 2BP. This means that
we have confirmed that the 2DPackLib benchmark for
the 2BP, despite being well-designed and comprehen-
sive, is probably too easy and should be extended.
In the remainder of the paper, we first introduce
the two variants of the 2BP in Section 2 and discuss
the related work on it in Section 3. We present our
approach to the 2BP, including the RLS and FRLS al-
gorithms, the encoding used, the search space, opera-
tors, and objective functions, in Section 4. The exper-
imental results are analyzed in Section 5 before we
conclude the paper with a summary and an outlook
for future work in Section 6.
2 2D BIN PACKING
In this paper, we consider two orthogonal rectangu-
lar two-dimensional bin packing problem variants,
which are defined as follows. The bins and items are
both two-dimensional rectangles. All bins have the
same width W ∈ N and height H ∈ N. The number of
available bins is unlimited. There are N ∈ N items.
The item i ∈ {1..N} has width w
i
∈ {1..W } and
height h
i
∈ {1..H}. For each item i, there is a de-
mand d
i
, meaning that d
i
instances of item i need
to be packed. Thus, the goal is to pack all the
T =
∑
N
i=1
d
i
item instances into as few bins as possi-
ble. The edges of the item instances must be parallel
to those of the bins. There must be no overlap and all
ECTA 2024 - 16th International Conference on Evolutionary Computation Theory and Applications
16

item instances must be contained entirely in the bins.
In the 2BP|O|F variant, the items have a fixed
orientation, must not be rotated, and are placed in
the same way they are defined in the problem in-
stance (Lodi et al., 2002)
1
. In the 2BP|R|F problem
variant, the item instances can be rotated by 90
◦
.
Both variants have packing plans s as solutions,
which can be defined as sets of T records s[ j] with
j ∈ {1..T }, each denoting the location of one packed
item instance in its bin. Thus, record s[ j] stores the
item s[ j].i ∈ {1..N}, the bin s[ j].b ∈ {1..T } into which
it should be packed, as well as the horizontal co-
ordinate s[ j].x
1
∈ {0..W − 1} and the vertical coordi-
nate s[ j].y
1
∈ {0..H −1} of the lower left corner of
the packed item instance. To represent whether the
item instance is rotated by 90
◦
or not, the coordi-
nates s[ j].x
2
∈ {1..W } and s[ j].y
2
∈ {1..H} of its up-
per right corner are stored as well. For s[ j].i = i,
it then either holds that s[ j].x
2
= s[ j].x
1
+ w
i
and
s[ j].y
2
= s[ j].y
1
+ h
i
if the instance of item i is not ro-
tated or s[ j].x
2
= s[ j].x
1
+ h
i
and s[j].y
2
= s[ j].y
1
+ w
i
if the item instance is rotated. Rotation is only per-
mitted in the 2BP|R|F variant.
The space of all such feasible packing plans is S.
The goal is to find the packing plan s ∈ S that re-
quires the fewest bins among all the possible feasi-
ble plans and, hence, also has the smallest total unoc-
cupied space inside the bins, i.e., that minimizes the
following objective function:
f
1
(s) = |{s[j].b ∀ j ∈ {1..T }}| (1)
For any 2BP instance, it is not a priori clear how
many bins will be required in the optimal solution.
However, lower bounds for f
1
provide a limit for
the best-case scenario. The geometric or continuous
bound lb
g
( f
1
) therefore returns the rounded-up quo-
tient of the total area sum of all item instances and the
bin area (Martello and Vigo, 1998):
lb
g
( f
1
) =
∑
N
i=1
w
i
h
i
d
i
/(W H)
(2)
Obviously f
1
(s) ≥ lb
g
( f
1
) for all s ∈ S, as it is impos-
sible to package the items into bins whose total area is
less than the total item area. The most commonly used
lower bound for f
1
may be lb
d
( f
1
) by (Dell’Amico
et al., 2002), which, due to its algorithmic formula-
tion, shall not be detailed here. In our work, we will
use the maximum lb
m
( f
1
) = max{lb
g
( f
1
),lb
d
( f
1
)} of
both bounds where appropriate.
1
The “F” stands for cutting being free if the problem is
considered from the CSP perspective.
3 RELATED WORK
A search for publications focused on these spe-
cific problem variants, in particular the 2BP|R|F,
produces significantly fewer results (Cid-Garcia and
Rios-Solis, 2020) compared to other classical prob-
lem domains such as the Traveling Salesperson Prob-
lem or the Quadratic Assignment Problem. This may
be due to the many different problem variants, their
sometimes non-obvious naming, and, finally, due to
the comparatively higher implementation effort for
simple algorithms (see Algorithm 3). Nevertheless,
the orthogonal rectangular 2BP with and without ro-
tation did attract some research attention over the
decades, although maybe not as much as it deserves.
(Bengtsson, 1982) contributed a heuristic algo-
rithm for packing rectangular pieces in 1982. The al-
gorithm involves an initial allocation of items to bins
and then tries to iteratively refine it. The goal of this
algorithm is to minimize the unused space in the bins
and it permits that some items may not be loaded,
so the results are not directly comparable to our 2BP
scenarios. The authors provide the beng benchmark
and use it in their experiments, where they achieve a
bin utilization between 95% and 98% within compu-
tational budgets of 0.5 and 1 second.
(Liu and Teng, 1999) proposed an Improved Bot-
tom Left (IBL) encoding that can translate signed per-
mutations to packings. In their work, the goal is to
minimize the packing height in a bin of infinite height.
Examples are provided, but no experimental results.
However, we will adapt the IBL to the 2BP in this
work (see Algorithm 3 later on).
(Lodi et al., 2004) developed the C library TSpack
for solving two- and three-dimensional bin packing
problems with the goal of minimizing the number of
bins. It offers iterative optimization through Tabu
Search whose key aspect is the ability to switch be-
tween neighborhoods of different sizes. The goal is to
tune between intensification and diversification. The
authors use a dataset similar to class, but with differ-
ent instances and hence, different bounds and solu-
tions. The results thus cannot be directly compared
with such obtained on 2DPackLib. The computational
budget per run is 60s.
(Terashima-Mar
´
ın et al., 2007) introduce two hy-
perheuristic approaches to the 2BP|R|F. They first
define a set of selection heuristics that choose items
and bins as well as a set of placement heuristics that
place the selected items into the selected bins. Then,
they synthesize rules that decide which of the heuris-
tics should be applied based on the current state of the
packing process. For this purpose, they both inves-
tigate an XCS-type Learning Classifier System and a
Randomized Local Search for Two-Dimensional Bin Packing and a Negative Result for Frequency Fitness Assignment
17

dedicated Genetic Algorithm (GA). The authors show
that the hyper-heuristics can synthesize heuristics that
can outperform the best single heuristic on any in-
stance, however, no results are reported that could be
used for direct comparison.
In the MultiCrossover GA (MXGA) by (Lee,
2008), solutions are integer strings storing, for each
of the T item instances, into which bin it should be
placed. The location of the item instances is then
computed by a heuristic placement routine. As opera-
tors, single-point crossover and single-swap mutation
are applied. The work again uses the class benchmark
and grants 120 seconds per run to its C-based algo-
rithm implementations. The number of repetitions is
not given. Results are averaged over instance groups,
divided by lb
d
and given with a precision of two dec-
imals.
(Wong and Lee, 2009) propose two heuristic
placement algorithms, namely Improved Lowest Gap
Fill (LGFi) for the case with rotation and LGFi
OF
for
the case where the items cannot be rotated. These
algorithms iteratively select the bin with the small-
est remaining space to place the current item until
all items are placed. LGFi is a constructive heuris-
tic that creates a single packing. It would therefore be
a possible alternative to the IBL method that we use
as the encoding scheme in our RLS and FRLS in Sec-
tion 4. Results for the class instances are reported and
normalized by lb
d
and another bound (Boschetti and
Mingozzi, 2003) with three decimals of precision.
(Parre
˜
no et al., 2010) developed the GRASP/VND
algorithm for 2BP|O|F problems, which combines
the greedy randomized adaptive Search Proce-
dure (GRASP) and the variable neighborhood de-
scent (VND). GRASP is a constructive algorithm that
builds solutions incrementally by iteratively select-
ing the best available option based on randomized
greedy criteria. It aims to balance exploitation (choos-
ing the best immediate option) and exploration (di-
versifying the search space). In GRASP/VND, the
GRASP procedure generates an initial solution by it-
eratively adding items to bins based on a randomized
greedy rule. VND is a local search algorithm that
explores different neighborhoods around a given so-
lution to find local optima. It iteratively moves from
one neighborhood to another until no further improve-
ment is possible. In GRASP/VND, the VND is applied
to the initial solution and improves it iteratively. The
algorithm is run for 50000 iterations on the class and
beng datasets. The average of the numbers of bins per
instance group is reported.
(Gonc¸alves and Resende, 2013) present the Bi-
ased Random Key GA (BRKGA) for 2D and 3D
bin packing problems with and without item rotation
(BRKGA-2r, BRKGA-aNB, respectively). The chro-
mosome encodes both the sequence in which items
are packed as well as their orientation. The authors
use the class and the beng instances, and also some
other benchmarks to evaluate their algorithm. They
conduct three runs per setup for 200 generations with
a population of 30 times the number T of item in-
stances, and report the average number of bins over
the instance groups.
The EA-LGFi for the 2BP|O|F by (Blum and
Schmid, 2013) is an Evolutionary Algorithm (EA)
that works on permutations and uses the aforemen-
tioned LGFi heuristic by (Wong and Lee, 2009) to
translate the permutations to packing plans. The pa-
per used class instances as the benchmark and found
four new best solutions. The computational budget is
10
6
FEs per run and one run is conducted per instance.
The sum of bins over all the solutions per instance
group is reported.
(Kierkosz and Luczak, 2013) developed an evolu-
tionary algorithm (EA) to select a subset of the items
and place them such that the maximum area in the sin-
gle available bin is used. None of the benchmarks in
2DPackLib are used.
(Beyaz et al., 2015) introduced their hyper-
heuristic method HHA-NO based on a Memetic Al-
gorithm, i.e., the combination of an EA with local
search. The genome contains the order of items to
be packed as well as two heuristic selections. The
first half of the items are packed using the first se-
lected heuristic and the second half using the sec-
ond selected heuristic. A population of 60 individ-
uals evolved for 40 generations. The algorithm is im-
plemented in C++ and the runtimes within the range
of 46s to 14.5min are reported for a selection of in-
stances. This runtime seems to be relatively high for
what should be around 60 ∗40 = 2400 objective func-
tion evaluations (FEs), raising the question of how to
fairly compare algorithms whose single steps require
vastly different runtimes (Weise et al., 2014a). The
authors use the class instances and report the sum of
the f
1
values over the instance set.
(Ma and Zhou, 2017) introduced two mixed-
integer programming (MIP) models for solving the
2BP. This is an exact solution approach, i.e., given
enough runtime, the optimal solution can be obtained.
The models are implemented under CPLEX. The au-
thors report the average runtime. The used bench-
mark instances are randomly generated and are not
part of an available benchmark set, and a comparison
is therefore not possible.
(Cid-Garcia and Rios-Solis, 2020) developed the
two-stage exact Positions and Covering (P&C) algo-
rithm for the 2BP with and without rotation. The
ECTA 2024 - 16th International Conference on Evolutionary Computation Theory and Applications
18

first stage involves an initial placement strategy to as-
sign items to preliminary positions, which maximizes
space utilization. The second stage employs a cover-
ing algorithm to further optimize item placement and
minimize wasted space. Results are reported for the
beng and some of the class instances which, neces-
sarily, are the correct optimal solutions (but are only
given as averages, sadly). The time limit for the runs
was set to 5 hours and the algorithm could not be com-
pleted on some instances.
Most recently, (Li et al., 2021) proposed a hy-
brid adaptive GA (HAGA) for a two-dimensional rect-
angular packing problem. As in (Bengtsson, 1982),
the goal is to maximize the filling rate of the sheets,
meaning that some items may not be selected for in-
clusion. The benchmark instances used are also not in
2DPackLib.
From this brief overview, we immediately no-
tice several problems for any researcher delving into
the 2BP. The existing works have different goals
(number of bins, fill rate), report results obtained on
different benchmarks, use different termination crite-
ria that can either be based on FEs or on time and then,
range from 0.5s to many days, and perform different
numbers of runs per instance. The actual solutions,
the packing plans, are almost never provided. Even
worse, the results are always averaged over bench-
mark instance sets, often normalized using different
lower bounds, and usually rounded to one or two dec-
imals. While it is possible (although error-prone) to
de-normalize the results for comparison purposes by
multiplying with the (right) lower bound, it is not pos-
sible to de-average or de-round them. . .
For a problem as important and common as the
2BP, there should be a complete set of unrounded, un-
normalized, and un-averaged results on a standard-
ized and publically available dataset. It is not neces-
sary that such a set represents the state-of-the-art or is
continuously updated. The presence of instances to-
gether with solutions and objective values alone will
allow other researchers to verify and replicate each
others’ work. And if all future publications include
complete results in immutable archives as we do here
in https://doi.org/10.5281/zenodo.13324219, the set
of best-known solutions emerges automatically.
We chose the recent 2DPackLib benchmark (Iori
et al., 2022) for our work, which has been published
by researchers who are responsible for several of the
most important milestones in the field (Iori et al.,
2021; Dell’Amico et al., 2002; Lodi et al., 2002; Lodi
et al., 2004; Martello and Vigo, 1998; Monaci and
Toth, 2006). Unfortunately, no results or solutions
were published along with the benchmark instances.
We close this gap. Moreover, by reporting all improv-
ing moves of our algorithm for a large computational
budget, arbitrarily shorter computational budgets can
be simulated by cutting off the later improvements.
4 OUR APPROACH
4.1 RLS and FRLS
As the baseline algorithm for our study, we use the
simplest local search method available, Randomized
Local Search (RLS), often also called Hill Climbing
or (1 + 1) EA (Russell and Norvig, 2002; Neumann
and Wegener, 2007; Johnson et al., 1988). As a black-
box metaheuristic, it allows us to choose a search
space P and a search operator move : P 7→ P, a decod-
ing function decode : P 7→ S that translates the points
in the search space to packing plans, and an objective
function f : S 7→ N rating the quality of such plans.
The blueprint of this metaheuristic is illustrated
in Algorithm 1. The algorithm begins by sampling
a random point π
c
from the search space P, decod-
ing it to a packing plan s
c
, and evaluating its objective
value z
c
= f (s
c
). In a loop, a new point π
n
is sam-
pled as a modified copy of π
c
using the unary opera-
tor move, decoded, and evaluated. If π
n
is not worse
than π
c
, it replaces it. When the computational bud-
get of 10
8
FEs is exhausted, both the best-so-far so-
lution s
c
and its quality z
c
are returned. In our exper-
iments, the algorithm terminates after 10
8
objective
function evaluations (FEs).
FFA is an algorithm module that prescribes re-
placing the objective values with their encounter fre-
quencies in the selection decisions. Plugging it into
the RLS yields the FRLS sketched in Algorithm 2.
This algorithm starts like RLS, but additionally ini-
tializes a frequency table H to be filled with zeros.
Where RLS compares the objective values z
n
and z
c
to
decide whether π
n
should replace π
c
or be discarded,
FRLS first increments the encounter frequencies H[z
n
]
and H[z
c
] of z
n
and z
c
and then compares these instead
of the objective values. As a result, it will accept π
n
if it corresponds to a solution whose objective value
has been seen less or equally often than the one cor-
responding to π
c
. Since FRLS does not care whether
z
n
is better than z
c
or not, the algorithm may lose the
best-discovered solution again and thus needs to re-
member it in an additional variable s
b
.
(Weise et al., 2021b; Weise et al., 2023) dis-
cuss the interesting theoretical features of the result-
ing algorithm that no longer optimizes towards bet-
ter solutions but, yet, will find these nevertheless be-
cause good solutions have rare objective values. It
was shown that this scheme yields remarkable perfor-
Randomized Local Search for Two-Dimensional Bin Packing and a Negative Result for Frequency Fitness Assignment
19
Algorithm 1: RLS(decode : P 7→ S, f : S 7→ N).
sample π
c
from P u.a.r.;
s
c
← decode(π
c
); ▷ see Algorithm 3
z
c
← f (s
c
); ▷ one of the objective functions
for 10
8
− 1 times do ▷ our termination criterion
π
n
← move(π
c
); ▷ depends on problem type
s
n
← decode(π
n
); z
n
← f (s
n
);
if z
n
≤ z
c
then
π
c
← π
n
; s
c
← s
n
; z
c
← z
n
return s
c
, z
c
Algorithm 2: FRLS(decode : P 7→ S, f : S 7→ N).
H ← (0, 0,· ·· ,0); ▷ H-table initially all 0s
sample π
c
from P u.a.r.;
s
c
← decode(π
c
); ▷ see Algorithm 3
z
c
← f (s
c
); ▷ one of the objective functions
s
b
← s
c
; z
b
← z
c
; ▷ best may otherwise get lost
for 10
8
− 1 times do ▷ our termination criterion
π
n
← move(π
c
); ▷ depends on problem type
s
n
← decode(π
n
); z
n
← f (s
n
);
if z
n
< z
b
then s
b
← s
n
; z
b
← z
n
;
H[z
c
] ← H[z
c
] + 1; H[z
n
] ← H[z
n
] + 1;
if H[z
n
] ≤ H[z
c
] then
π
c
← π
n
; s
c
← s
n
; z
c
← z
n
return s
b
, z
b
▷ return preserved best
mance on the Max-SAT domain, where it can speed
up multiple algorithms several thousand times (Weise
et al., 2023), as well as on the JSSP (Weise et al.,
2021a; de Bruin et al., 2023) and on the TSP (Liang
et al., 2022; Liang et al., 2024). Whether it can re-
peat this impressive performance on the 2BP will be
investigated in our experiments.
4.2 Encoding and Search Operators
Defining search operators for the packing plans s ∈ S
directly is complicated. However, when solving the
2BP|O|F, we can use permutations π with repetitions
as search space P to represent the packing orders.
Each item ID i ∈ {1..N} occurs d
i
times in π. The
permutations π therefore have length T .
For the 2BP|R|F, we allow the elements of π to be
signed: Each time an item ID occurs, it then can do
so either in its original (positive) value, meaning that
an instance of i is to be packed in its original orien-
tation (w
i
,h
i
), or negated, i.e., as −i, which signifies
that an instance of i is packed after a 90
◦
rotation, that
is, having dimensions (h
i
,w
i
).
The decoding function decode is based on the Im-
proved Bottom Left IBL heuristic by (Liu and Teng,
1999) and adopted to the 2BP in (Zhao et al., 2024).
It accepts one such packing order π ∈ P and translates
Algorithm 3: decode(π ∈ P) 7→ S.
b ← 1; ▷ start at bin 1
for k ∈ {1..T } do ▷ iterate over all T elements
in π
i ← π[k]; ▷ get current item ID
if i < 0 then ▷ ≡ rotation in 2BP|R|F
i ← −i; w ← h
i
; h ← w
i
;
else w ← w
i
; h ← h
i
;
▷ some rotations may be invalid in 2BP|R|F
if w > W ∨ h > H then swap w and h;
▷ put item with bottom-right corner on
top-right corner of current bin
set s[k].b ← b; s[k].i ← i; s[k].x
1
← W − w;
s[k].y
1
← H; s[k].x
2
← W ;
s[k].y
2
← H +h;
move s[k] down-left as far as possible without
creating any overlap; prefer moving
down over moving left;
if s[k].y
2
> H then ▷ item does not fit in bin?
▷ put it at bottom-left corner of a new bin
b ← b + 1;
set s[k].b ← b; s[k].x
1
← 0; s[k].y
1
← 0;
s[k].x
2
← w; s[k].y
2
← h;
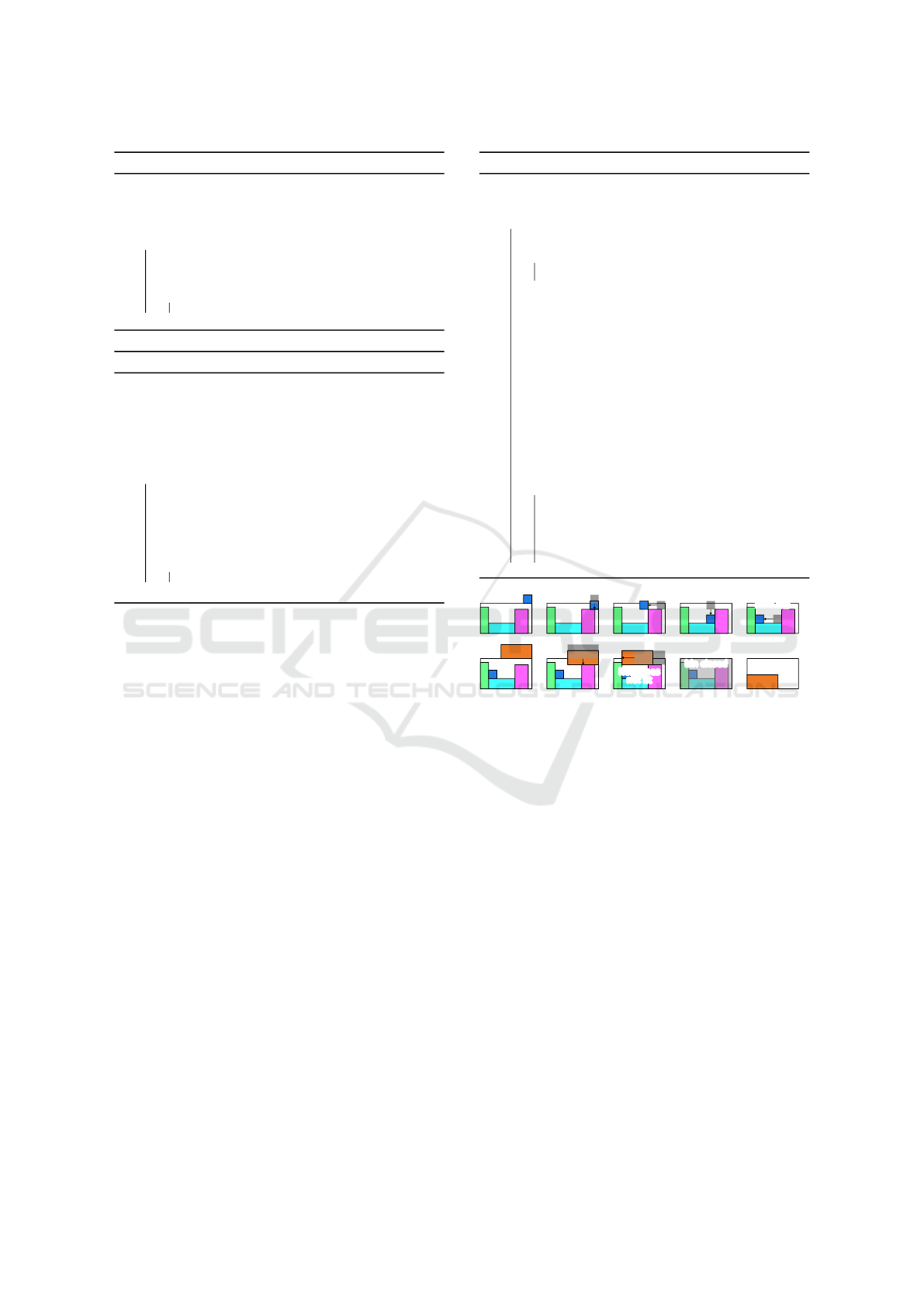
return s
bin closedbin closed
new bin
item fitsitem fits
item does
not fit
item does
not fit
Figure 1: An illustrative example of the decoding Algo-
rithm 3 (read from the top-left to the bottom-right).
it to a packing plan s ∈ S. It therefore iterates over
the (potentially signed) permutation s and places the
items into the packing plan in the prescribed order. As
sketched in Figure 1, it first places the item instance
outside on top of the bin, with its bottom-right corner
onto the top-right corner of the current bin b. It then
moves the instance downwards and leftwards as far as
possible, prioritizing the downward movement when-
ever possible. If the item instance cannot be moved
any further, we check if it is completely contained in
the bin b. If yes, it can remain there. Otherwise, a
new bin is opened (b ← b + 1) and the item instance
is placed at its bottom-left corner. Once a new bin is
opened, this bin is used for all further insertions.
For the 2BP|O|F, the unary search operator move :
P 7→ P accepts one point π
a
∈ P and returns a
point π
b
∈ P where two randomly chosen different el-
ements are swapped.
For the 2BP|R|F, where the elements of the per-
mutations π can be signed, it produces a point π
b
where either one value is negated or two different val-
ECTA 2024 - 16th International Conference on Evolutionary Computation Theory and Applications
20

ues are swapped. It therefore first creates a copy π
b
of
π
a
and draws an index j uniformly at random (u.a.r.)
in {1..T }. It then draws a Boolean value v, which
is either True or False, u.a.r. If v = True, it tries
to swap two different elements in π
b
. It therefore at-
tempts for at most 10T times to draw a random in-
dex k ∈ {1..T } with π
b
[k] ̸= π
b
[ j]. If this succeeds,
it swaps the values at indices j and k in π
b
and re-
turns π
b
. Otherwise, i.e., if either no appropriate in-
dex k was found (which can happen, e.g., if all items
are identical) or if v = False, it flips the sign of π
b
[ j]
and returns π
b
.
Finally, in (Zhao et al., 2024), several objective
functions that minimize the number of bins were dis-
cussed as alternatives to f
1
on the 2BP|R|F. It was
found that the function f
7
(see Equation 5) combining
the number of bins f
1
with the area under the skyline
(the top border of the packing) in the last bin yielded
the best results. An RLS using this objective function
will prefer a packing s
n
over a packing s
c
if it requires
fewer bins or, if both require the same number of bins
but s
n
has a lower skyline in its last bin. We will in-
vestigate both f
1
and f
7
in our experiments.
inB(s,b) = { j ∀ j ∈ {1..T } ∧ s[ j].b = b} (3)
sl(s,b) =
W −1
∑
x=0
max
s[ j].y
2
: ∀ j ∈ inB(s,b)∧
s[ j].x
1
≤ x < s[ j].x
2
(4)
f
7
(s) = W H( f
1
(s) − 1) + sl(s, f
1
(s)) (5)
5 EXPERIMENTS AND RESULTS
5.1 Setup
We implement our algorithms in Python 3.10 on Win-
dows 10 on an Intel64 Family 6 Model 167 CPU us-
ing the moptipy (Weise and Wu, 2023) framework, as
well as numba just-in-time compilation where pos-
sible. We conduct 3 runs per algorithm setup and
problem instance, except for the RLS- f
7
, for which
we conduct 5 runs. Since this algorithm performed
best, we deemed it worth to gather more data for it
as basis for future experiments. We use a computa-
tional budget of at most 10
8
objective function eval-
uations (FEs) per run, which is the same as in (Zhao
et al., 2024).
We use the 2DPackLib by (Iori et al., 2022), which
offers three sets of 2BP instances in a unified format:
The ten instances of type beng (Bengtsson, 1982)
have both bin and item dimensions drawn from uni-
form distributions. They have 20 to 200 items and
the largest bin size is (40,25). The class instance
set (Berkey and Wang, 1987; Martello and Vigo,
1998) is divided into ten classes based on the bin and
item dimensions, the former of which ranges from
(10,10) to (300, 300). Each class is divided into five
groups with N ∈ {20,40, 60,80, 100} items. Each
group contains ten benchmark instances. Finally, the
set A (Macedo et al., 2010) offers 43 instances with
N ∈ {13..809} and bin sizes of either (2750,1220),
(2550,2100), or (2470,2080).
Additionally to the 2DPackLib, we consider the
four non-trivial “Almost Squares in Almost Squares”
(AsqasN) instances from (van den Berg et al., 2016).
They have N ∈ {3, 8,20,34} and the widths of all
objects are one unit larger than their heights, i.e.,
w
i
= h
i
+ 1 ∀i ∈ {1..N} and W = H + 1. The goal is
to pack all items into a single bin, which would result
in a perfect packing without any wasted space.
5.2 Results
In Table 1 we present the results of our methods for
the 2BP|R|F (with rotation) and in Table 2 for the
2BP|O|F (without rotation).
2
We conducted 3 runs
per algorithm setup and problem instance for at most
10
8
objective function evaluations (FEs), except for
the RLS- f
7
setups, for which we performed 5 runs.
While we do present the sum of the number of bins
added up over groups of instances like the related
works do, we first average the results over each in-
stance. The final results are rounded to full integers.
The best values per instance group are marked with
bold face and we count how often each algorithm can
achieve the best result on the class and beng instance
groups in the bottom row (# best c&b).
Among our own four algorithm setups, the RLS
using f
7
can achieve the best results. On the 2BP|R|F,
it is outperformed only by the BRKGA-2r, which
achieves the best result 52 times whereas the average
result of RLS- f
7
is best 38 times. The third best al-
gorithm is HHA-NO(sr) (Beyaz et al., 2015), which
achieves the best result 22 times.
On the 2BP|O|F, the BRKGA-aNB scores
best 49 times, followed by the EA-LGFi
by (Blum and Schmid, 2013) (44 times) and the
GRASP/VND (Parre
˜
no et al., 2010) (43 times). The
average results of RLS- f
7
are the best 41 times.
2
For MXGA (Lee, 2008) normalized results have been
reported. We de-normalized them, but had to use lb
m
in-
stead of lb
d
to get reasonable values. Still, due to round-
ing errors, we had to correct the values for class 1/60 and
class 1/100, which, probably due to the result of rounding
in (Lee, 2008), de-normalizing, and then rounding again,
came out slightly below the optimal result delivered by
P&C. Due to this rounding process, the comparison with
MXGA must be taken with a grain of salt. As said, this pro-
cess is error-prone.
Randomized Local Search for Two-Dimensional Bin Packing and a Negative Result for Frequency Fitness Assignment
21
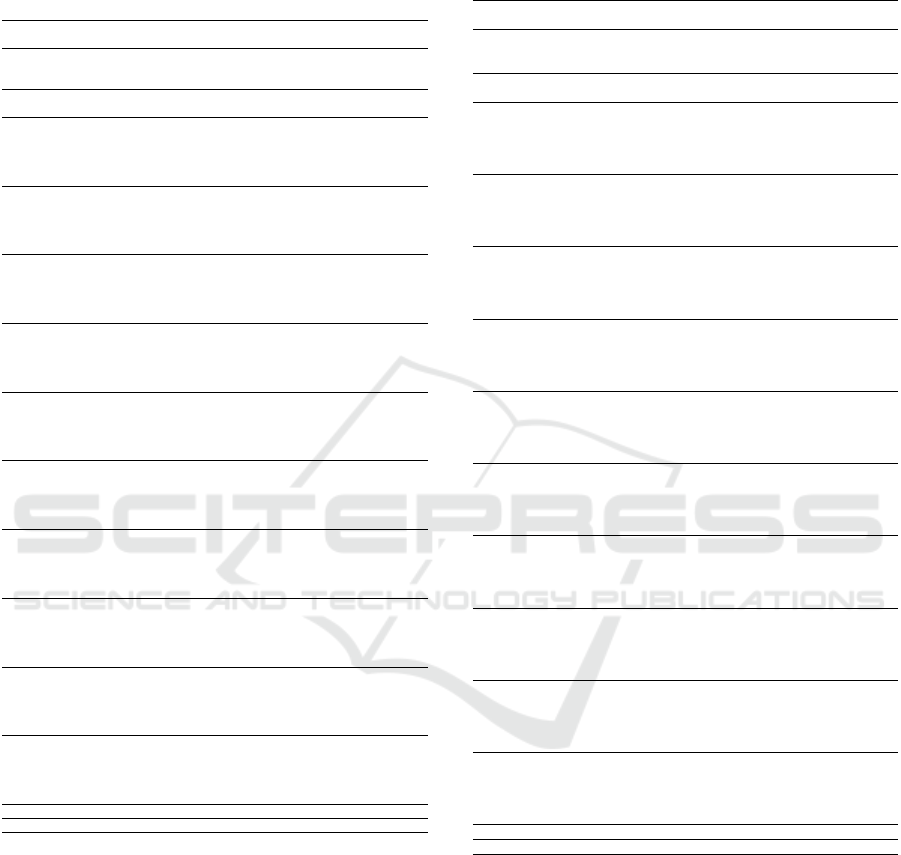
Table 1: Average total number of bins of the RLS and FRLS
on the 2BP|R|F (with rotation) for objective functions f
1
and f
7
for 3 runs per setting in comparison to the related
work. For RLS- f
7
, 5 runs were conducted, for the other
settings only 3. Column RLS- f
⋆
7
is the best result of the 5
RLS- f
7
runs.
instance BRKGA HHA-NO MXGA P&C FRLS RLS
group 2r (r) (sr) f
1
f
7
f
1
f
7
f
⋆
7
a/small 100 99 99 97 97
a/med 203 221 198 176 174
a/large 745 867 721 651 644
beng/1-8 54 54 61 54 60 54 54
beng/9-10 13 13 15 13 14 13 13
class 1/20 66 66 66 66 66 66 66 66 66 66
class 1/40 128 131 129 129 128 132 129 131 129 128
class 1/60 195 196 195 195 195 205 195 202 195 195
class 1/80 270 270 270 270 270 283 274 278 270 270
class 1/100 313 314 313 313 313 340 325 331 313 313
class 2/20 10 10 10 10 10 10 10 10 10 10
class 2/40 19 20 19 21 19 20 19 20 19 19
class 2/60 25 25 25 25 25 29 25 28 25 25
class 2/80 31 31 31 31 31 36 31 35 31 31
class 2/100 39 39 39 39 39 42 40 42 39 39
class 3/20 47 48 48 48 47 48 47 47 47 47
class 3/40 92 95 95 94 97 94 97 94 93
class 3/60 134 137 137 136 148 142 146 134 134
class 3/80 182 186 187 184 207 206 201 183 183
class 3/100 220 225 225 223 250 253 244 220 220
class 4/20 10 10 10 10 10 10 10 10 10
class 4/40 19 19 19 19 19 19 19 19 19
class 4/60 23 25 25 25 28 25 27 24 23
class 4/80 31 32 33 32 35 33 35 31 31
class 4/100 37 38 38 38 42 40 42 37 37
class 5/20 59 59 59 59 59 59 59 59 59
class 5/40 114 116 115 114 120 118 119 114 114
class 5/60 172 175 176 177 186 191 182 174 173
class 5/80 239 240 241 241 257 271 251 239 239
class 5/100 277 284 284 279 308 330 302 278 278
class 6/20 10 10 10 10 10 10 10 10 10
class 6/40 16 18 17 21 19 17 19 16 16
class 6/60 21 22 22 21 23 22 23 21 21
class 6/80 30 30 30 30 31 30 31 30 30
class 6/100 32 34 34 34 39 37 38 32 32
class 7/20 52 52 52 52 52 52 52 52 52
class 7/40 102 106 107 104 111 109 107 103 102
class 7/60 146 152 153 147 162 164 157 146 146
class 7/80 208 216 217 213 232 244 228 208 208
class 7/100 250 260 259 255 281 298 274 250 250
class 8/20 53 53 53 53 53 53 53 53 53
class 8/40 103 106 105 105 111 111 108 104 104
class 8/60 147 155 154 149 164 166 160 148 148
class 8/80 204 213 214 209 229 240 225 207 206
class 8/100 252 261 262 255 284 302 278 253 252
class 9/20 143 143 143 143 143 143 143 143 143
class 9/40 275 275 275 275 275 275 275 275 275
class 9/60 435 435 435 436 435 435 435 435 435
class 9/80 573 573 573 574 573 573 573 573 573
class 9/100 693 693 693 695 693 693 693 693 693
class 10/20 41 41 41 43 41 41 41 41 41
class 10/40 72 73 73 73 79 73 76 73 72
class 10/60 99 101 101 101 112 107 109 99 99
class 10/80 125 129 130 129 146 144 142 126 125
class 10/100 154 161 162 159 184 185 179 158 156
asqas 6 6 6 6 6
# best c&b 52 19 22 19 13 14 22 15 38 44
However, if we consider the best results of five runs
of RLS- f
7
(denoted in column f
⋆
7
), this algorithm
achieves 50 times the best solution and would rank
first. In other words, had we given five times the
computational budget and performed restarts, a
simple local search would have outperformed all of
the much more complicated algorithm designs on the
2BP|O|F.
The P&C (Cid-Garcia and Rios-Solis, 2020) is an
exact method that always finds the optimal solutions.
On the 2BP|R|F, the average results of RLS- f
7
reach
the same (optimal) quality on all but one of the in-
stance groups (class 1/40) where results of P&C are
Table 2: Average total number of bins of the RLS and FRLS
on the 2BP|O|F (without rotation) for objective functions
f
1
and f
7
in comparison to the related work. For RLS- f
7
,
5 runs were conducted, for the other settings only 3. Col-
umn RLS- f
⋆
7
is the best result of the 5 RLS- f
7
runs.
instance BRKGA EA GRASP P&C FRLS RLS
group aNB LGFi VND f
1
f
7
f
1
f
7
f
⋆
7
a/small 102 101 101 101 101
a/med 202 211 202 181 180
a/large 733 801 719 641 635
beng/1-8 54 54 54 60 54 60 55 54
beng/9-10 13 13 13 14 13 14 13 13
class 1/20 71 71 71 71 71 71 71 71 71
class 1/40 134 134 134 134 136 134 136 134 134
class 1/60 200 200 200 200 206 200 203 200 200
class 1/80 275 275 275 275 285 275 281 275 275
class 1/100 317 317 317 317 341 324 333 317 317
class 2/20 10 10 10 10 10 10 10 10 10
class 2/40 19 19 19 19 20 19 20 19 19
class 2/60 25 25 25 25 28 25 27 25 25
class 2/80 31 31 31 31 36 31 35 31 31
class 2/100 39 39 39 39 42 39 42 39 39
class 3/20 51 51 51 51 51 51 51 51 51
class 3/40 94 94 94 98 94 97 94 94
class 3/60 139 139 139 149 140 147 140 139
class 3/80 189 189 189 206 204 204 190 189
class 3/100 223 224 223 251 249 243 223 223
class 4/20 10 10 10 10 10 10 10 10
class 4/40 19 19 19 19 19 19 19 19
class 4/60 25 23 25 28 25 27 25 24
class 4/80 31 31 31 36 33 36 31 31
class 4/100 37 37 38 42 39 42 37 37
class 5/20 65 65 65 65 65 65 66 65
class 5/40 119 119 119 123 120 122 119 119
class 5/60 180 180 180 188 190 185 180 180
class 5/80 247 247 247 259 270 253 247 247
class 5/100 281 284 282 309 328 305 282 281
class 6/20 10 10 10 10 10 10 10 10
class 6/40 16 17 17 19 17 19 17 16
class 6/60 21 21 21 23 22 23 21 21
class 6/80 30 30 30 32 30 31 30 30
class 6/100 33 32 34 39 37 38 32 32
class 7/20 55 55 55 55 55 55 55 55
class 7/40 111 111 111 116 113 116 111 111
class 7/60 158 159 159 165 162 162 159 158
class 7/80 232 232 232 239 240 236 232 232
class 7/100 271 271 271 284 293 282 271 271
class 8/20 58 58 58 58 58 58 58 58
class 8/40 113 113 113 115 114 115 113 113
class 8/60 161 161 161 168 167 166 161 161
class 8/80 224 224 224 233 236 231 224 224
class 8/100 278 277 278 292 298 286 277 277
class 9/20 143 143 143 143 143 143 143 143
class 9/40 278 278 278 278 278 278 278 278
class 9/60 437 437 437 437 437 437 437 437
class 9/80 577 577 577 577 577 577 577 577
class 9/100 695 695 695 695 695 695 695 695
class 10/20 42 42 42 43 42 42 42 42
class 10/40 74 74 74 79 74 77 74 74
class 10/60 100 101 100 112 105 111 101 100
class 10/80 128 128 129 145 143 142 129 128
class 10/100 158 160 159 183 184 179 159 159
asqas 8 8 8 8 8
# best c&b 49 44 43 13 14 27 15 41 50
available. The best result of the RLS with f
7
(col-
umn f
⋆
7
) is also optimal on class 1/40. The exact same
situation can be observed on the 2BP|O|F, but now
beng/1-8 is the only instance group for which P&C
results are available where RLS- f
7
is worse (on aver-
age). The best of five runs of the same algorithm do
find the optimal solutions for beng/1-8 as well.
It becomes obvious from both tables that f
7
leads
to much better results compared to f
1
. This is ex-
pected. What is unexpected is that FRLS is consis-
tently worse than RLS. RLS is prone to get stuck at
local optima. From the tables, we also know that the
ECTA 2024 - 16th International Conference on Evolutionary Computation Theory and Applications
22
100 200 300 400 500 600 700 800
10
0
10
1
10
2
10
3
10
4
10
5
10
6
10
7
10
8
T
mean life (log-scaled)
FRLS-f₁
FRLS-f₇
RLS-f₁
RLS-f₇
2BP|O|F
100 200 300 400 500 600 700 800
10
0
10
1
10
2
10
3
10
4
10
5
10
6
10
7
10
8
T
mean life (log-scaled)
FRLS-f₁
FRLS-f₇
RLS-f₁
RLS-f₇
2BP|R|F
Figure 2: The average over the index life of the objective function evaluation where the last improving move was made by
the different algorithms, plotted over the total number T of item instances to pack. The plot for the problem variant without
rotation (2BP|O|F) is on the left and the one for the variant with rotation (2BP|R|F) is on the right.
7 12
18
15
9
6
20
19
14
8
11
17
13
10 5
2BP|O|F
15
6
8
20
19
9
13
5
18
12 10
7
14
17
2BP|R|F
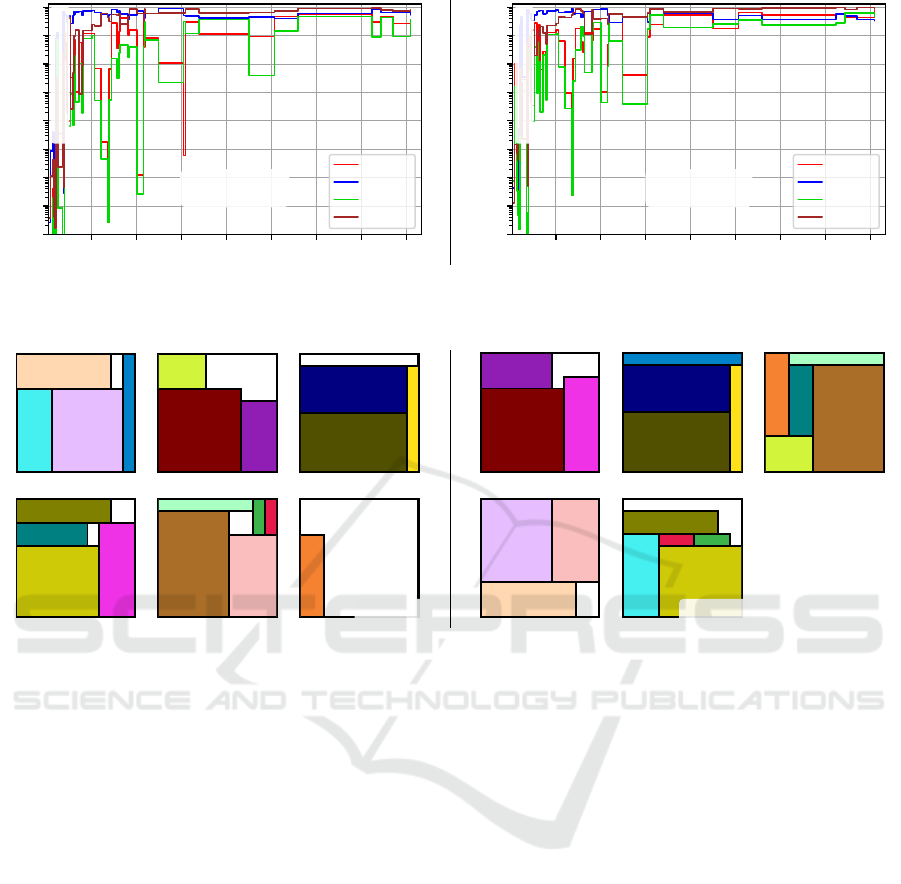
Figure 3: Two optimal result of RLS- f
7
on class 1/20-4 for the problem variant without rotation (2BP|O|F) on the left and for
the variant with rotation (2BP|R|F, on the right).
best-of-five-runs result ( f
⋆
7
columns) is better than the
average results ( f
7
columns) for RLS. One would as-
sume that this must be due to RLS getting stuck at dif-
ferent local optima. (In this case, restarting the algo-
rithm, which is equivalent to running it five times and
taking the best result, would be a good idea.) Then
why does FRLS, which has been shown to deliver
much better results in previous works on N P -hard
problems, perform worse than RLS? Should it not be
able to escape from the local optima?
Now, in our experiments, we use a generous bud-
get of 10
8
objective function evaluations per run. If
RLS would get stuck at local optima, then we would
expect that it would stop improving much earlier. The
index life of the objective function evaluation where
its last improving move takes place would be much
lower than 10
8
. Of course, it will also be lower on
small-scale instances where it already finds the opti-
mal solution and we know that it does so on several
instances from our tables. Either way, in Figure 2 we
plot this index over the total number T of item in-
stances to pack. In stark contrast to the reasonable ex-
pectation regarding the behavior of RLS- f
7
, we notice
that the algorithm keeps finding improvements until
the end of the computational budget, consistently over
all not-too-small problem scales and for both investi-
gated objective functions. RLS- f
7
does not get stuck
in local optima. As a result, FRLS cannot outperform
it, because its strength is exactly to avoid getting stuck
at local optima and it trades in speed for obtaining this
ability.
Finally, we illustrate two packings discovered by
RLS- f
7
on instance class 1/20-4. From Table 1 and
Table 2, we know that RLS- f
7
finds results of the
same average quality over all class 1/20 instances as
P&C. Since P&C is an exact method always return-
ing the optimal solution, the results of RLS- f
7
are
therefore also optimal in average and, hence, opti-
mal in each run on each of the class 1/20 instances.
The optimal packing in Figure 3 for the problem vari-
ant 2BP|O|F where items have a fixed orientation and
cannot be rotated and requires six bins. The fact that
lots of space in the bins is left unused hints towards
the problem being rather easy, as this would proba-
bly allow us to place the items slightly differently and
still get the optimal number of bins. Figure 3 also
Randomized Local Search for Two-Dimensional Bin Packing and a Negative Result for Frequency Fitness Assignment
23

shows the optimal packing for the same instance but
for 2BP|R|F, illustrating that one bin can be saved if
item rotation is permitted.
6 CONCLUSIONS
Our experiments confirmed that randomized local
search (RLS) performs very well on two important
variants of the 2BP, the 2BP|R|F and the 2BP|O|F.
What does this mean? Our results indicate that RLS
does not get stuck at local optima, or, at least does so
much later than one would expect. The implications
of this are interesting: If RLS does not get suck at
local optima, then any mechanism that aims to avoid
getting stuck at local optima is essentially useless. If
RLS does not get stuck at local optima, then extend-
ing it to tabu search by introducing tabu and aspira-
tion criteria to avoid local optima could not yield a
performance improvement. If RLS does not get stuck
at local optima, then sometimes accepting worse so-
lutions, as simulated annealing would do, could not
yield better results. If RLS does not get stuck at local
optima, then FRLS cannot outperform it. The latter
is what we observed in our experiments here as well,
while doing tests with tabu search and simulated an-
nealing will be part of our future work. Also, this
could be the reason why the very simple RLS seems
to be competitive to much more sophisticated algo-
rithms.
Now it seems unlikely that an N P -hard problem
does not have local optima. But maybe the bench-
mark instances in the 2DPackLib are not challenging
enough. So from this perspective, we would suggest
that creating harder instances is indeed needed. This,
too, is part of our future work.
Therefore, while this work presents a first negative
result for Frequency Fitness Assignment (FFA), this
finding has to be taken with a grain of salt: We will
revisit the problem once we have a set of instances
of which we can confirm that RLS cannot solve them
well.
ACKNOWLEDGEMENTS
The authors acknowledge support from the Project
of National Natural Science Foundation of China
62406095, the Project of Natural Science Foundation
of Anhui Province 2308085MF213, the Key Research
Plan of Anhui Province 2022k07020011, the Univer-
sity Scientific Research Innovation Team Project of
Anhui Province 2022AH010095, as well as the Hefei
Specially Recruited Foreign Expert program and the
Hefei Foreign Expert Office program.
REFERENCES
Bengtsson, B.-E. (1982). Packing rectangular pieces
– A heuristic approach. The Computer Journal,
25(3):353–357.
Berkey, J. O. and Wang, P. Y. (1987). Two-
dimensional finite bin-packing algorithms. Journal
of the Operational Research Society, 38(5):423–429.
doi:10.1057/jors.1987.70.
Beyaz, M., Dokeroglu, T., and Cosar, A. (2015). Ro-
bust hyper-heuristic algorithms for the offline
oriented/non-oriented 2D bin packing prob-
lems. Applied Soft Computing, 36:236–245.
doi:10.1016/j.asoc.2015.06.063.
Blum, C. and Schmid, V. (2013). Solving the 2D
bin packing problem by means of a hybrid evolu-
tionary algorithm. In Alexandrov, V., Lees, M.,
Krzhizhanovskaya, V. V., Dongarra, J. J., and Sloot, P.
M. A., editors, International Conference on Computa-
tional Science (ICCS’13), June 5–7, 2013, Barcelona,
Spain, volume 18 of Procedia Computer Science,
pages 899–908, Amsterdam, The Netherlands. Else-
vier. doi:10.1016/j.procs.2013.05.255.
Boschetti, M. A. and Mingozzi, A. (2003). The two-
dimensional finite bin packing problem. Part II: New
lower and upper bounds. 4OR – the Quarterly Jour-
nal of the Belgian, French and Italian Operations Re-
search Societies, 1(2):135–147. doi:10.1007/s10288-
002-0006-y.
Braam, F. and van den Berg, D. (2022). Which rectangle
sets have perfect packings? Operations Research Per-
spectives, 9(100211). doi:10.1016/j.orp.2021.100211.
Cid-Garcia, N. M. and Rios-Solis, Y. A. (2020). Po-
sitions and covering: A two-stage methodol-
ogy to obtain optimal solutions for the 2d-bin
packing problem. PLoS ONE, 15(4):e0229358.
doi:10.1371/journal.pone.0229358.
de Bruin, E., Thomson, S. L., and van den Berg, D.
(2023). Frequency fitness assignment on JSSP: A
critical review. In Correia, J., Smith, S. L., and
Qaddoura, R., editors, Proceedings of the 26th Eu-
ropean Conference on Applications of Evolutionary
Computation (EvoApplications’23), Held as Part of
EvoStar 2023, April 12-14, 2023, Brno, Czech Repub-
lic, volume 13989 of Lecture Notes in Computer Sci-
ence, pages 351–363, Cham, Switzerland. Springer.
doi:10.1007/978-3-031-30229-9 23.
Dell’Amico, M., Martello, S., and Vigo, D. (2002). A lower
bound for the non-oriented two-dimensional bin pack-
ing problem. Discrete Applied Mathematics, 118(1-
2):13–24. doi:10.1016/S0166-218X(01)00253-0.
Gonc¸alves, J. F. and Resende, M. G. (2013). A bi-
ased random key genetic algorithm for 2D and
3D bin packing problems. International Jour-
nal on Production Economics, 145(2):500–510.
doi:10.1016/j.ijpe.2013.04.019.
ECTA 2024 - 16th International Conference on Evolutionary Computation Theory and Applications
24

Iori, M., de Lima, V. L., Martello, S., Miyazaw, F. K.,
and Monaci, M. (2021). Exact solution techniques
for two-dimensional cutting and packing. European
Journal of Operational Research, 289(2):399–415.
doi:10.1016/j.ejor.2020.06.050.
Iori, M., de Lima, V. L., Martello, S., and Monaci, M.
(2022). 2DPackLib: A two-dimensional cutting and
packing library. Optimization Letters, 16(2):471–480.
doi:10.1007/s11590-021-01808-y.
Johnson, D. S., Papadimitriou, C. H., and Yannakakis,
M. (1988). How easy is local search? Jour-
nal of Computer and System Sciences, 37(1):79–100.
doi:10.1016/0022-0000(88)90046-3.
Kierkosz, I. and Luczak, M. (2013). A hybrid evolutionary
algorithm for the two-dimensional packing problem.
Central European Journal of Operations Research,
22(4):729–753.
Lee, L.-S. (2008). A genetic algorithm for two-
dimensional bin packing problem. MathDigest: Re-
search Bulletin of Institute for Mathematical Re-
search, 2(1):34–39. http://psasir.upm.edu.my/id/
eprint/12464/1/Artikel 6 vol2 no1.pdf.
Li, X. and Zhang, K. (2018). Single batch process-
ing machine scheduling with two-dimensional
bin packing constraints. International Jour-
nal of Production Economics, 196:113–121.
doi:10.1016/j.ijpe.2017.11.015.
Li, Y., Sang, H., Xiong, X., and Li, Y. (2021).
An improved adaptive genetic algorithm for two-
dimensional rectangular packing problem. Applied
Sciences, 11(1):413. doi:10.3390/app11010413.
Liang, T., Wu, Z., L
¨
assig, J., van den Berg, D., Thom-
son, S. L., and Weise, T. (2024). Addressing the
traveling salesperson problem with frequency fitness
assignment and hybrid algorithms. Soft Computing.
doi:10.1007/s00500-024-09718-8.
Liang, T., Wu, Z., L
¨
assig, J., van den Berg, D., and
Weise, T. (2022). Solving the traveling salesper-
son problem using frequency fitness assignment. In
Ishibuchi, H., Kwoh, C., Tan, A., Srinivasan, D.,
Miao, C., Trivedi, A., and Crockett, K. A., edi-
tors, IEEE Symposium Series on Computational In-
telligence (SSCI’22), December 4–7, 2022, Singa-
pore, pages 360–367, Piscataway, NJ, USA. IEEE.
doi:10.1109/SSCI51031.2022.10022296.
Liu, D. and Teng, H. (1999). An improved BL-algorithm for
genetic algorithm of the orthogonal packing of rect-
angles. European Journal of Operational Research,
112(2):413–420. doi:10.1016/S0377-2217(97)00437-
2.
Lodi, A., Martello, S., and Vigo, D. (2002). Recent
advances on two-dimensional bin packing problems.
Discrete Applied Mathematics, 123(1–3):379–396.
doi:10.1016/S0166-218X(01)00347-X.
Lodi, A., Martello, S., and Vigo, D. (2004).
TSpack: A unified tabu search code for multi-
dimensional bin packing problems. Annals
of Operations Research, 131(1–4):203–213.
doi:10.1023/B:ANOR.0000039519.03572.08.
Ma, N. and Zhou, Z. (2017). Mixed-integer program-
ming model for two-dimensional non-guillotine bin
packing problem with free rotation. In 4th Interna-
tional Conference on Information Science and Control
Engineering (ICISCE), July 21-23, 2017, Changsha,
China, pages 456–460, Piscataway, NJ, USA. IEEE.
doi:10.1109/ICISCE.2017.102.
Macedo, R., Alves, C., and Val
´
erio de Carvalho,
J. M. (2010). Arc-flow model for the two-
dimensional guillotine cutting stock problem. Com-
puters & Operations Research, 37(6):991–1001.
doi:10.1016/j.cor.2009.08.005.
Martello, S. and Vigo, D. (1998). Exact solution of the two-
dimensional finite bin packing problem. Management
Science, 44(3):388–399. doi:10.1287/mnsc.44.3.388.
Monaci, M. and Toth, P. (2006). A set-covering-
based heuristic approach for bin-packing problems.
INFORMS Journal on Computing, 18(1):1–134.
doi:10.1287/ijoc.1040.0089.
Neumann, F. and Wegener, I. (2007). Randomized lo-
cal search, evolutionary algorithms, and the minimum
spanning tree problem. Theoretical Computer Sci-
ence, 378(1):32–40. doi:10.1016/j.tcs.2006.11.002.
Parre
˜
no, F., Alvarez-Vald
´
es, R., Oliveira, J. F., and
Tamarit, J. M. (2010). A hybrid GRASP/VND al-
gorithm for two- and three-dimensional bin pack-
ing. Annals of Operations Research, 179(1):203–220.
doi:10.1007/s10479-008-0449-4.
Pejic, I. and van den Berg, D. (2020). Monte carlo
tree search on perfect rectangle packing problem in-
stances. In Coello, C. A. C., editor, Genetic and
Evolutionary Computation Conference (GECCO’20),
Companion Volume, July July 8-12, 2020, Canc
´
un,
Mexico, pages 1697–1703, New York, NY, USA.
ACM. doi:10.1145/3377929.3398115.
Pinto, M., Silva, C., Th
¨
urer, M., and Moniz, S. (2024).
Survey in operations research and management sci-
ence. nesting and scheduling optimization of addi-
tive manufacturing systems: Mapping the territory.
Computers & Operations Research, 165(106592).
doi:10.1016/j.cor.2024.106592.
Russell, S. J. and Norvig, P. (2002). Artificial Intelligence:
A Modern Approach (AIMA). Prentice Hall Interna-
tional Inc., Upper Saddle River, NJ, USA, 2 edition.
Terashima-Mar
´
ın, H., Z
´
arate, C. J. F., Ross, P., and
Valenzuela-Rend
´
on, M. (2007). Comparing two
models to generate hyper-heuristics for the 2D-
regular bin-packing problem. In Lipson, H., edi-
tor, Genetic and Evolutionary Computation Confer-
ence (GECCO’07), July 7-11, 2007, London, UK,
pages 2182–2189, New York, NY, USA. ACM.
doi:10.1145/1276958.1277377.
van den Berg, D., Braam, F., Moes, M., Suilen, E., and
Bhulai, S. (2016). Almost squares in almost squares:
Solving the final instance. In Bhulai, S. and Se-
manjski, I., editors, DATA ANALYTICS 2016: The
Fifth International Conference on Data Analytics, Oc-
tober 9-13, 2026, Venice, Italy, Wilmington, DE,
USA. International Academy, Research, and Indus-
try Association (IARIA). https://math.vu.nl/
∼
sbhulai/
publications/data analytics2016b.pdf.
Weise, T., Chiong, R., Tang, K., L
¨
assig, J., Tsutsui, S.,
Chen, W., Michalewicz, Z., and Yao, X. (2014a).
Randomized Local Search for Two-Dimensional Bin Packing and a Negative Result for Frequency Fitness Assignment
25

Benchmarking optimization algorithms: An open
source framework for the traveling salesman problem.
IEEE Computational Intelligence Magazine, 9(3):40–
52. doi:10.1109/MCI.2014.2326101.
Weise, T., Li, X., Chen, Y., and Wu, Z. (2021a).
Solving job shop scheduling problems without us-
ing a bias for good solutions. In Genetic and
Evolutionary Computation Conference (GECCO’21),
July 10-14, 2021, Lille, France, Companion Vol-
ume, pages 1459–1466, New York, NY, USA. ACM.
doi:10.1145/3449726.3463124.
Weise, T., Wan, M., Tang, K., Wang, P., Devert, A.,
and Yao, X. (2014b). Frequency fitness assignment.
IEEE Transactions on Evolutionary Computation,
18(2):226–243. doi:10.1109/TEVC.2013.2251885.
Weise, T. and Wu, Z. (2023). Replicable self-documenting
experiments with arbitrary search spaces and algo-
rithms. In Genetic and Evolutionary Computa-
tion Conference Companion (GECCO’23 Compan-
ion), July 15-19, 2023, Lisbon, Portugal, New York,
NY, USA. ACM. doi:10.1145/3583133.3596306.
Weise, T., Wu, Z., Li, X., and Chen, Y. (2021b). Fre-
quency fitness assignment: Making optimization al-
gorithms invariant under bijective transformations
of the objective function value. IEEE Transac-
tions on Evolutionary Computation, 25(2):307–319.
doi:10.1109/TEVC.2020.3032090.
Weise, T., Wu, Z., Li, X., Chen, Y., and L
¨
assig, J. (2023).
Frequency fitness assignment: Optimization without
bias for good solutions can be efficient. IEEE Transac-
tions on Evolutionary Computation, 27(4):980–992.
doi:10.1109/TEVC.2022.3191698.
Wong, L. and Lee, L. S. (2009). Heuristic placement
routines for two-dimensional bin packing problem.
Journal of Mathematics and Statistics, 5(4):334–341.
https://www.thescipub.com/pdf/jmssp.2009.334.341.
Zhao, R., Liang, T., Wu, Z., van den Berg, D., Th
¨
urer,
M., and Weise, T. (2024). Randomized local
search on the 2D rectangular bin packing prob-
lem with item rotation. In Genetic and Evolu-
tionary Computation Conference (GECCO’24 Com-
panion), July 14–18, 2024, Melbourne, VIC, Aus-
tralia, pages 235–238, New York, NY, USA. ACM.
doi:10.1145/3638530.3654139.
ECTA 2024 - 16th International Conference on Evolutionary Computation Theory and Applications
26
