Analysis of Drivers’ Path Follow Behaviour
Gerg
˝
o Ferenc Ign
´
eczi
1 a
, Ern
˝
o Horv
´
ath
1 b
and Attila Borsos
2
1
Vehicle Industry Research Center, University of Gy
˝
or, Gy
˝
or, Hungary
2
Department of Transport Infrastructure and Water Resources Engineering,
University of Gy
˝
or, Gy
˝
or, Hungary
Keywords:
Lane Wandering, Driver Modelling, Path Tracking, Control.
Abstract:
Lane keeping is a complex, multi-dimensional problem in terms of driving tasks. The lane-following driver
models typically treat the control task as an end-to-end problem where the entire control chain is modelled as
a human driver. However, the driver does not actively control the vehicle all the time, but follow a drift and
compensate strategy, resulting in oscillations around their planned path. We have separated this oscillation
scheme by filtering drivers’ selected offset to the centerline of the lane. It has been shown that there is a
certain amount of offset error up to which drivers drift away from the planned path. At this point drivers
intervene by applying torque to the steering wheel and steer the vehicle back onto the path. This type of drift
and compensate strategy was modelled using Model Predictive Control (MPC) with event-based weights of its
cost function. The proposed driver model calculates both the intervention point and the weights of the MPC
based on real drivers’ data. As a result, the model together with the MPC can accurately plan the oscillation
path of the drivers, contributing to a better understanding of how the driver tolerates offset errors.
1 INTRODUCTION
Driver behaviour has been studied for decades. The
foundations of driver models were laid in the 1950s
(McKnight and Adams, 1970) (Wilde, 1982) (Kle-
bersberg, 1971), and complex model structures were
created later (Evans and Schwig, 1985) (Michon,
1985) (W.H, 1979) (Theeuwes, 1993) (Cody and Gor-
don, 2007). Research into advanced driver assistance
systems (ADAS) began to grow enormously in the
2000s. The aim of automated driving systems is to
mimic human drivers in various situations. There-
fore, researchers started to use driver models not only
with a descriptive goal, but also as an active com-
ponent of ADAS. The ADAS function we focus on
is Lane Keeping Assistance (LKA). This system ac-
tively steers the vehicle to keep it within the lane.
LKA follows the center of the lane, on the other hand,
human drivers select an offset to the centerline. The
lane following manoeuvre is equal to the selection of
the vehicle path, which can be given by the vehicle
position offset from the centre of the lane. This value
is often referred to as the lane offset:
Lane offset: ∆y(t)
a
https://orcid.org/0000-0002-1258-837X
b
https://orcid.org/0000-0001-5083-2073
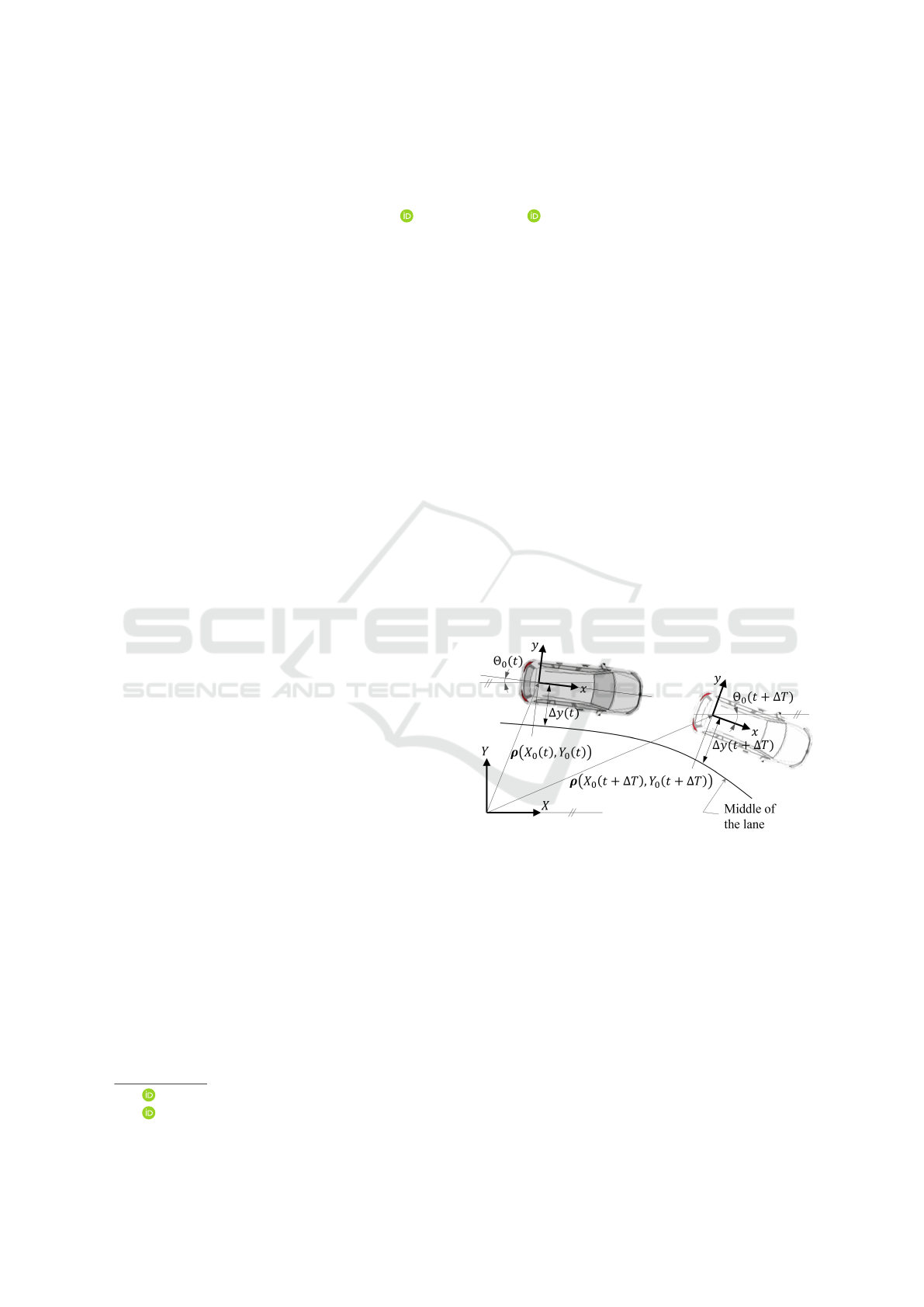
Figure 1: The vehicle coordinate system and the lane offset.
This quantity gives the distance between the centre
of the lane and the origin of the vehicle coordinate
frame, fixed to the rear axle. This frame is a two-
dimensional moving frame in the fixed global frame
defined by
X Y
. The vehicle coordinate frame is
given by ρ
ρ
ρ
X
0
(t) Y
0
(t)
position vector and Θ
0
(t)
orientation. An illustration is given in Figure 1. The
lane offset ∆y(t) is the superposition of planning and
execution. Planning is assumed to be slower, with a
longer time horizon, while execution is a short term
process. The following quantities are introduced:
Planned Lane Offset: ∆y
planned
(t)
Offset Error: ∆y
error
(t)
Ignéczi, G., Horváth, E. and Borsos, A.
Analysis of Drivers’ Path Follow Behaviour.
DOI: 10.5220/0012889100003822
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 2, pages 93-100
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
93
The lane offset is given by the sum of these terms:
∆y(t) = ∆y
planned
(t) + ∆y
error
(t) (1)
The aim is to separate the two components of the lane
offset given in (1). The simple solution is to model
the planned lane offset as the long-term average of
the lane offset. Although for large number of samples
the long term average gives a good estimate of the
expected value of the planned lane offset, for shorter
snippets it is really far from the actual value. This
proves the instinctive idea that drivers change their
planned position in time. It is therefore advisable to
low-pass filter the lane offset to obtain the planned
lane offset, as given in (2).
∆y
planned
(t) = g
LP
(∆y(t), f
c
)
∆y
error
(t) = ∆y(t) − ∆y
planned
(t) (2)
where f
c
is the filter cut off frequency, g
LP
(∆y(t), f
c
)
is the low-pass filter equation. Filtering the lane offset
divides the data into two parts: low frequency changes
in the lane offset, which is the planned lane offset,
and high frequency changes in the lane offset, which
is the offset error. The offset error is the result of the
manoeuvre execution and as such represents a vehicle
level control scheme. This scheme is to be modelled
by observing the behaviour of human drivers.
The problem we wish to analyse in this paper is de-
fined by the following questions:
• Offset error separation: how can we separate the
offset error from the planned lane offset?
• Control scheme modelling: how can we model the
control scheme of a generic driver?
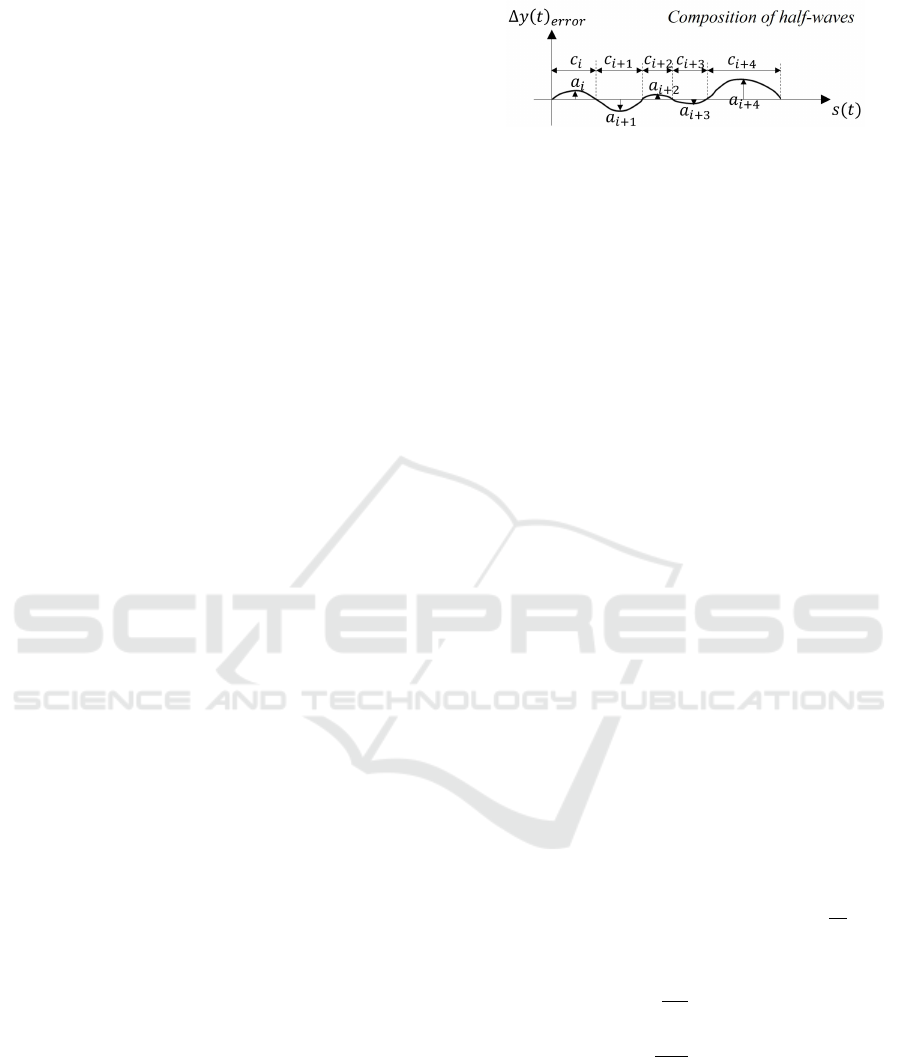
The offset error is expected to be a composi-
tion of half-waves, that represent a drift-away-and-
compensate behaviour. Drift and Compensation in
this context mean a relative movement to the planned
path. During the drift phase, the driver is assumed to
be letting the vehicle go by applying a small amount
of torque to the steering wheel. In the compensation
phase, the driver actively intervenes to compensate
the increased offset error. An illustration is given in
Figure 2. The complete drift and compensation phase
is called snippet. The point between the two phases
is called intervention point. The intervention point is
the time at which the offset error reaches its local ex-
tremum a
i
:
a
i
= ∆y
extr,i
error
=
max{∆y
error
(t)}
t
end,i
t
start,i
,
for left side compensation
min{∆y
error
(t)}
t
end,i
t
start,i
,
for right side compensation
(3)
t
start,i
and t
end,i
are the start and end time points of the
snippet i. In the following we analyse real drivers’
Figure 2: The offset error oscillation schemes, illustrated by
manually drawn signals. The short-term compensation be-
haviour results in oscillating offset error, which is assumed
to be a sequential composition of half-waves of different
frequency and amplitude.
data to determine the cut-off frequency f
c
given in (2)
and thus to separate the offset error from the planned
lane offset given in (1). Then, the offset error be-
haviour is reproduced using a control driver model. It
is demonstrated that drivers indeed follow the drift-
and-compensate scheme. The results can be used
to design human-like controllers and to better under-
stand human lane-following behaviour.
2 OFFSET ERROR SEPARATION
In this section, the cut-off frequency f
c
given in (2) is
calculated. A two-step approach is used. First, rec-
ommendations for the value of f
c
are sought from the
literature. Then, simulations are performed to explore
possible cut-off frequencies, and the final value is
chosen. The simulation is done using real-life drivers’
data (Ign
´
eczi and Horv
´
ath, 2024). Path-following
driver models are classified into the following three
groups (Peng, 2005): inverse dynamic models, com-
pensatory models and feedforward models. Inverse
dynamic models usually specify a look-ahead time to
determine control error (Conlter, 1992) (Wang et al.,
2020) (D Salvucci and Gray, 2004) (Erno et al., 2019).
For instance, (Hess and Modjtahedzadeh, 1990) sug-
gests using T
contT heo
la
= 0.16s to look ahead. (Wang
et al., 2020) suggests a look ahead distance of d
la
=
8m at v
x
= 2m/s, which is equal to T
PP
la
=
d
la
v
x
= 4s.
These look-ahead times are converted to frequency
values:
f
ct
c
=
1
T
ct
la
= 6.25Hz
f
PP
c
=
1
T
PP
la
= 0.25Hz (4)
Compensatory models, such as the Control Theoretic
Model (Hess and Modjtahedzadeh, 1990), divides the
control task into subtasks: vehicle position and actu-
ator control. These two layers are different in which
frequency range they represent the movement of the
vehicle. Actuator control is a high frequency control
scheme, while vehicle position control is modelled
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
94
as a PI controller in a lower frequency range. The
crossover frequency between these two is suggested
to be 1 rad/s = 0.16 Hz. The time constant of the
PI controller is selected one decimal point below the
crossover frequency, which equals 0.016 Hz. These
together define the range of the recommended filter
cut-off frequency:
0.016Hz ≤ f
co
c
≤ 0.16Hz (5)
A similar compensation model is developed in (Saleh
et al., 2011). The suggested vehicle position control
time constant is T
cy
c
= 3s, which equals:
f
cy
c
=
1
2πT
cy
c
= 0.053Hz (6)
Note that the time constant is related to the angular
frequency of the system, so multiplication by 2π is
required. Although the frequency characteristics of
the drivers are not specifically analysed in (D Salvucci
and Gray, 2004), the controller is tuned to oscillate
around the target path with a cycle time of T
tP
p
= 2s,
then:
f
tP
c
=
1
T
tP
p
= 0.5Hz (7)
Feedforward models use the vehicle model to predict
its behaviour and thus calculate an optimal control tra-
jectory on a so called prediction horizon (McAdam,
1980) (Peng, 2005) (Jiang et al., 2019) (Katriniok
et al., 2013). The prediction horizon length suggested
in (McAdam, 1980) is not specifically defined, while
in (Jiang et al., 2019) and (Peng, 2005) the horizon is
recommended to be not more than T
mpc,1
h
= 60s and
between T
min
h
= 1s and T
max
h
= 2s respectively. This
can be translated to frequencies:
f
mpc,1
c
≥
1
T
mpc,1
h
= 0.016Hz
1
T
max
h
= 0.5Hz ≤ f
mpc,2
c
≤
1
T
min
h
= 1Hz
(8)
It is clear that the papers do not agree on what is de-
fined as the optimal control frequency. However, they
do give a range of possible frequencies, as given in
(eq:simulationFrequency).
f
min
c
=
min( f
ct
c
, f
PP
c
, f
co
c
, f
cy
c
, f
tP
c
, f
mpc,1
c
, f
mpc,2
c
) = 0.016Hz
≤ f
c
≤ f
max
c
=
max( f
ct
c
, f
PP
c
, f
co
c
, f
cy
c
, f
tP
c
, f
mpc,1
c
, f
mpc,2
c
) = 1Hz
(9)
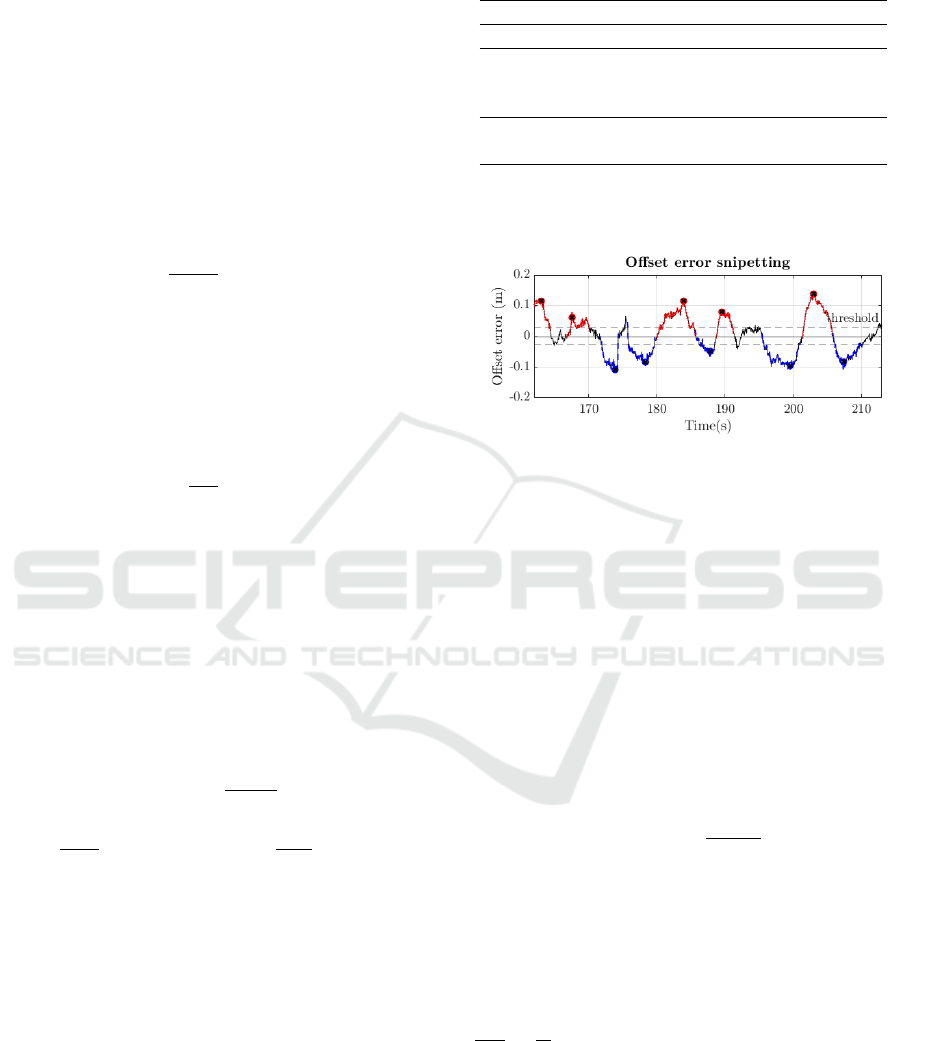
This frequency range is now tested, the test steps are
detailed in Table 1. An example of the snippet is
shown in Figure 3. The threshold is chosen to be 10%
Table 1: Filtering and Snippeting Algorithm.
Step 1: Filtering lane offset using f
c
Step 2: Offset error calculation given in (2)
Step 3: Thresholding of the offset error
Sections, where the offset error absolute value
is below a small threshold, are neglected
Step 4: Intervention point calculation
The peaks in the offset error are searched
Step 5: Snippetting
The time point when the offset error reaches
zero in time forward and backward are searched
Figure 3: The visualization of snipetting the half-waves
based on the offset error. Blue sections indicate right
side half-waves, red sections indicate left side half-waves.
Source of data: HLB4AV dataset (Ign
´
eczi and Horv
´
ath,
2024), driver no. 001.
of the standard deviation of the lane offset. In this
example the cut-off frequency is f
c
= 0.1Hz.
After filtering and cutting, the snippets are tested
based on performance metrics. Let us take the as-
sumption that the distribution of the length of snippets
from Figure 2 is
c
i
∈ N (µ
c
,σ
c
) (10)
We aim to minimize σ
c
. In addition, an indicator of
the coverage of the snippets is calculated. Its formula
is given in (11).
coverage =
∑
N
i=1
c
i
T
(11)
N is the number of snippets, c
i
is the length of the
snippet i as shown in Figure 2. T is the total length
of the data. The higher the coverage, the better the
cut. The simulation is run using values of the cut-
off frequency in the range given in (9). The results
are shown in Figure 4. The σ
c
value has been nor-
malised to its maximum value, namely σ
normalised
c
=
σ
c
σ
max
c
=
σ
c
6s
, in order to have similar scale to the cov-
erage. Also, coverage has been recalculated to har-
monise its interpretation with σ
c
: the higher σ
c
, the
worse the performance. Therefore, (1 − coverage) is
plotted instead of coverage. The indicators are cal-
culated individually for all drivers and all f
c
selec-
tions, then the mean, minimum and maximum per fre-
quency values are plotted. The optimum performance
Analysis of Drivers’ Path Follow Behaviour
95
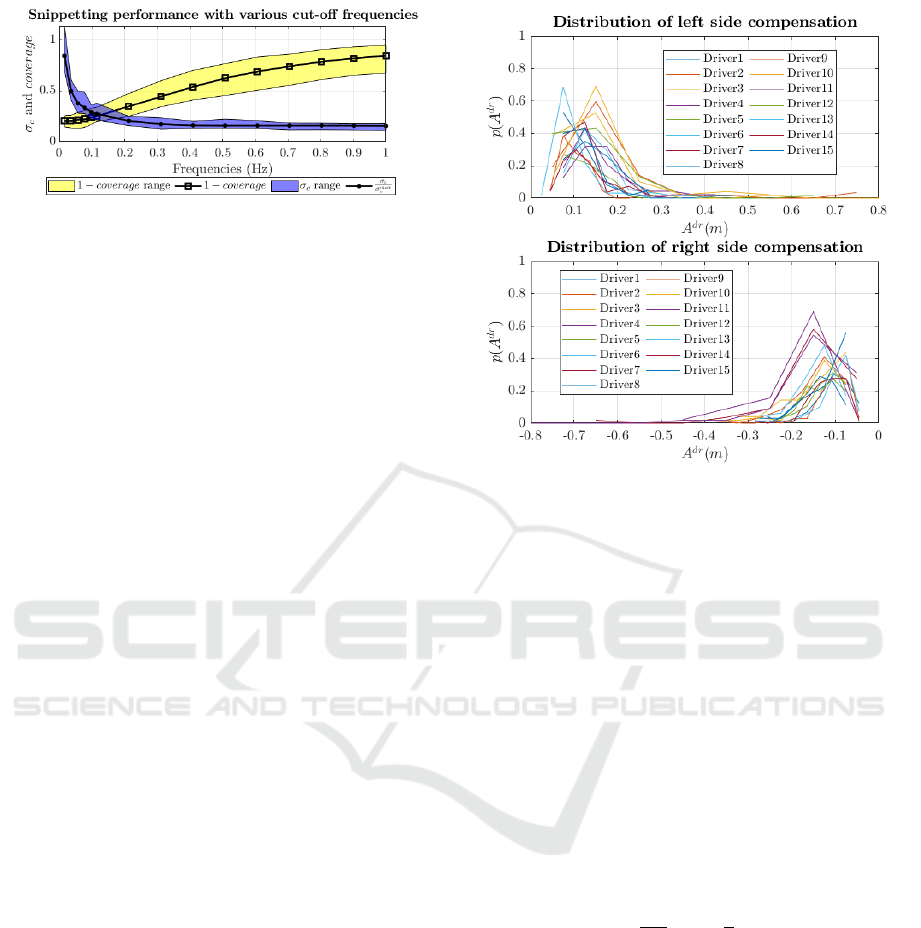
Figure 4: J(F
c
) cost of various cut-off frequency selection
for all drivers in our dataset (Ign
´
eczi and Horv
´
ath, 2024).
is where the mean curves intersect, which fall in the
range of 0.1Hz ≤ f
c
≤ 0.12Hz. In the followings, the
offset error is calculated by applying (2) with a cut-off
frequency given in (12).
f
f inal
c
= f
c
= 0.11Hz (12)
3 COMPENSATION SCHEME
MODELLING
3.1 Intervention Point Calculation
In Section 2 the filter cut-off frequency was defined.
The offset error is then cut into snippets using the al-
gorithm introduced in Table 1. In this section, the
snippets are analysed to show how the compensation
behaviour of a generic driver can be modelled. As
shown in Figure 2, a snippet consists of three sections:
drift-away phase, intervention point, and compensa-
tion phase. Based on definition introduced in (3), let
us denote the set of offset error extrema for a given
driver dr ∈ Dr from driver group Dr with A
dr
:
A
dr
= {a
1
,a
2
,·· · , a
N
}
dr
(13)
N is the number of snippets. The snippets are sep-
arated for left and right side deviations. The dis-
tribution of A
dr
le f t
and A
dr
right
for different drivers are
shown in Figure 5. For all drivers a
Dr
i
≥ −0.65m and
a
Dr
i
≤ 0.65m. However, the probability of such ex-
treme offset error values is small. For most drivers
−0.3m ≤ a
Dr
i
≤ 0.3m. The highest probability (mean
of A
dr
) is in the range of 0.075m ≤ A
dr
≤ 0.15m,
∀dr ∈ Dr for the left deviation and −0.15m ≤ A
dr
≤
−0.05m ∀dr ∈ Dr for the right deviation from the
planned path. In the following sections the values
given in (13) are used for the simulations.
3.2 Control Model
Once the intervention point is calculated, the drift-
away and compensation phases can be separated. An
Figure 5: The distribution of offset error extrema of 15
drivers of the HLB4AV dataset (Ign
´
eczi and Horv
´
ath,
2024). Most of the drivers intervene at an offset error be-
tween 0.05 and 0.15 m.
event-based Model Predictive Control (MPC) is set
up, using different weights of its cost function for the
drift and compensation phases. The MPC is based on
a kinematic single-track model, whose equations are
given in (14).
X
r
=
Z
t
0
v
ξ,r
cos(Θ)dτ + X
r,0
Y
r
=
Z
t
0
v
ξ,r
sin(Θ)dτ +Y
r,0
v
ξ,r
=
Z
t
0
a
ξ,r
dτ + v
ξ,r,0
Θ =
Z
t
0
ωdτ + Θ
0
ω =
v
ξ,r
ρ
= v
ξ,r
1
l
tan(δ
f
)
tan(δ
f
) = lκ (14)
Where X
r
and Y
r
are the global coordinates of the ve-
hicle, Θ is the global orientation, v
ξ,r
and a
ξ,r
are the
speed and acceleration of the vehicle in its own frame,
ω is the yawrate of the vehicle. δ
f
is the road-wheel-
angle of the front wheel, l is the longitudinal axle dis-
tance, κ is the curvature, ρ is the radius of the vehicle
path. This model is linearized around working point
x =
X
0
Y
0
v
ξ,r,0
Θ
0
ω
0
. Then, the linearized
model is used with the MPC structure proposed by (L,
2009). During drifting, the vehicle is released by ap-
plying a small amount of torque to the steering wheel
to meet the driver’s comfort requirements (no active
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
96

Figure 6: Examples of snippets from data of driver no. 001
from HLB4AV dataset (Ign
´
eczi and Horv
´
ath, 2024). Blue
lines are directly from the measurement, red lines are res-
imulated signals using the MPC logic.
control is required). As soon as the driver judges the
situation to be critical, high steering torque is applied
to compensate for the offset error and return the vehi-
cle to the planned path, satisfying the driver’s risk re-
duction requirement. These two opposing control tar-
gets are included in most MPC cost functions (Peng,
2005) (Jiang et al., 2019) (McAdam, 1980) (Katriniok
et al., 2013). The cost function is defined as
J(∆U
U
U,E
E
E) =
N
p
∑
n=1
∆U
U
U
T
R
R
R∆U
U
U +E
E
E
T
Q
Q
QE
E
E (15)
where ∆U
U
U ∈ R
N×N
p
is a matrix of input signals, N
is the number of inputs, N
p
is the prediction hori-
zon, E
E
E ∈ R
M×N
p
is a matrix of output errors, M is
the number of outputs, R
R
R ∈ R
M×M
and Q
Q
Q ∈ R
N×N
are
weight matrices. In our application, the input signal
is the steering wheel angle, while the output error is
the offset error. There are five parameters in this MPC
configuration: the steering wheel amplitude and off-
set error weights for the drift-away and compensation
phases, w
d
r
and w
c
r
, w
d
q
and w
c
q
respectively, and the
prediction horizon N
p
. The prediction horizon is cho-
sen based on the offset error cut-off frequency given
in (12):
N
p
=
1
f
c
× T
s
=
1
0.11Hz × 0.05s
≈ 180 (16)
where T
s
is the measurement sampling time. By
choosing the weights correctly, the drift-away and
compensation paths can be reproduced. The follow-
ing steps are performed:
1. the data of the given driver is cut to snippets,
2. the intervention points given in (13) are calculated
based on (3),
3. the MPC weights of the drift-away and compen-
sation phases are optimized by simulating the ve-
hicle path based on (17).
The optimization is done using the fmincon function
of MATLAB. The optimization problem is defined as
follows:
min
w
d
r
,w
d
q
,w
c
r
,w
c
q
Z
t
1
t
0
1
2
ε
2
∆y
error
(t, w
d
r
,w
d
q
,w
c
r
,w
c
q
)dt
s.t. w
d
r
,w
d
q
,w
c
r
,w
c
q
≥ 0 (17)
where t
1
is the end of the compensation phase, t
0
is
the start of the drift phase, ε
∆y
error
(t)
is the output error
calculated according to (18).
ε
∆y
error
(t, w
d
r
,w
d
q
,w
c
r
,w
c
q
) =
∆y
error,sim
(t, ·)− ∆y
error,meas
(t, ·)
(18)
An example of resimulation using the optimised
weights for Driver 001 (Ign
´
eczi and Horv
´
ath, 2024)
are shown in Figure 6. In simulation, the controller
output is applied on the model introduced in (14). The
model and the controller are implemented in MAT-
LAB. The event-based MPC succeeds to reproduce
the drift and compensation path. The weights for
these two snippets are shown in Table 2. The overall
results for all drivers are given later in Section 4. We
Table 2: The optimized parameters of Driver 1 for the snip-
pet, shown in Figure 6.
w
d
q
w
d
r
w
c
q
w
c
r
Snippet 1 0.007 32.366 0.003 65.802
propose to use the model structure shown in Figure 7.
The MPC block acts as the vehicle level control, cal-
culating the target steering angle based on the planned
path. The controller dynamics are influenced by the
controller parameters provided by the Driver Model.
It includes the intervention point calculation and the
controller parameter calculation.
Figure 7: The proposed model structure.
This driver model structure is used to generate the
Analysis of Drivers’ Path Follow Behaviour
97

overall results. The intervention point is calculated
from the measurements using the values shown in
Figure 5. The MPC weights are taken from the re-
sults of the optimisation introduced in (17).
4 RESULTS
In this section the driver model is used together with
the MPC from Figure 7 to simulate vehicle paths.
The planned path is based on the planned lane offset
∆y
planned
(t) from (1). The goodness of the model is
given by the Normalised Root-Mean-Square (NRMS)
value of the Euler distance (ED) between the sim-
ulated path and the measured path. The simulated
path is interpolated for the longitudinal coordinates
x of the measured path. Therefore, the Euler dis-
tance of the path points are simplified to the differ-
ence between the y coordinates (note that the x co-
ordinates are strictly monotonically increasing in all
cases). The ED vector for the i
th
section is calculated
as follows:
E
E
ED
D
D
i
= ∥P
P
P
i
sim
− P
P
P
i
meas
∥ =
y
y
y
i
sim
− y
y
y
i
meas
(19)
where P
P
P
sim
∈ R
M×2
and P
P
P
meas
∈ R
M×2
are the 2D co-
ordinates of the simulated and measured paths respec-
tively. Similarly, y
y
y
i
sim
and y
y
y
i
meas
are the y coordinates
of the simulated and measured paths respectively. M
is the number of sample points in the snippet. Also
E
E
ED
D
D
i
∈ R
M
. Then the NRMS value of the vector E
E
ED
D
D
i
is calculated. The normalisation is done using the
range of E
E
ED
D
D
i
:
NRMS
i
ED
=
q
1
M
(
∑
M
j=1
E
E
ED
D
D
i
[ j]
2
)
max(E
E
ED
D
D
i
) − min(E
E
ED
D
D
i
)
(20)
where j is a running index indicating the j
th
element
of E
E
ED
D
D
i
vector. Finally, the mean and standard devi-
ation of the NRMS
i
ED
values of the given driver are
calculated:
NRMS
dr
ED
=
1
S
S
∑
i=1
NRMS
i
ED
(21)
σ
NRMS
dr
ED
=
s
∑
S
i=1
(NRMS
i
ED
−
NRMS
dr
ED
)
2
S
(22)
where S is the number of snippets in the measurement
of driver dr. This indicator is calculated for all left
and right snippets, separately. The result of all test
drivers are shown in Table 3. The NRMS value gives a
ratio between the total error and the quantity in focus.
Thus, an error of 0.017 (as in the case of Driver 1)
means that the average distance of the simulated path
Table 3: Results of the simulations. The NRMS value of
the distance between planned and measured path. Source of
data: (Ign
´
eczi and Horv
´
ath, 2024).
Left deviation Right deviation
Dr NRMS
Dr
ED
σ
NRMS
Dr
ED
NRMS
Dr
ED
σ
NRMS
Dr
ED
Dr001 0.017 0.019 0.011 0.013
Dr002 0.019 0.024 0.008 0.010
Dr003 0.013 0.013 0.015 0.021
Dr004 0.052 0.044 0.026 0.085
Dr005 0.034 0.056 0.030 0.027
Dr006 0.018 0.025 0.045 0.058
Dr007 0.279 0.764 0.032 0.029
Dr008 0.016 0.033 0.175 0.575
Dr009 0.022 0.030 0.018 0.020
Dr010 0.022 0.030 0.039 0.051
Dr011 0.016 0.019 0.027 0.034
Dr012 0.022 0.026 0.032 0.048
Dr013 0.037 0.066 0.038 0.056
Dr014 0.018 0.024 0.026 0.031
Dr015 0.022 0.029 0.054 0.153
from the measured one is the 1.7% of the range of the
measured y coordinates. In this sense, the comparison
is intuitively easy. The mean and standard deviation
of NRMS
Dr
ED
are in most cases less than 10%. The
error is slightly higher in the case of Driver 7 (mean is
around 28%). The analysis of Driver 7’s data showed
that in certain cases the MPC reacts more dynamically
in the compensation phase of this driver. We believe
that the problem may be caused by optimiser finding a
local minimum instead of the global one, as the shape
of the offset error is very similar to other drivers.
5 CONCLUSIONS
In this paper we have investigated the compensatory
behaviour of human drivers around their planned
path. The offset signal to the lane centre was fil-
tered, resulting in the offset error signal. We expected
drivers to oscillate continuously around their planned
path, first drifting away from it (increasing offset er-
ror), then intervening and compensating the increased
error back to zero towards the planned path (decreas-
ing offset error). This is called as the drift-away
and compensate behaviour. The proposed solution
provides not only a control algorithm (this is taken
over from the state-of-the-art Model Predictive Con-
trollers), but the parametrization, as well. It means,
that using MPCs with the proposed driver parameters
the output of the closed loop control will be closely
human-like. Such analysis is rarely executed in the
field of vehicle controls, as the requirements used in
similar papers focus on minimizing the error to a pri-
orly planned path (e.g., midlane). However, this is
often unnaturalistic, as people wish to deviate from
the midlane.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
98

In this paper it was shown that a suitable low pass
filter frequency is f
c
= 0.11Hz. The offset error sig-
nal was decomposed into half-waves, which account
for the full drift and compensate snippets. It has been
shown, that the total length of these snippets is about
80% of the full data length, proving the generality of
the filtering and cutting. Secondly, the intervention
point when the driver switches from the drift to the
compensation phase was calculated. The offset error
extrema associated with the intervention are between
0.05m and 0.15m for most of the drivers. Thirdly,
the drift and compensation phases have been mod-
elled using an event-based Model Predictive Control
(MPC), with different weights for the two phases. The
values of these weights were calculated by optimis-
ing the model output against the drivers’ measure-
ments. Finally, it has been demonstrated that the pro-
posed driver model together with the MPC can ac-
curately reproduce the compensation path of the se-
lected drivers.
These results provide better understanding of the
drivers’ path following behaviour. Usually, the re-
sulting vehicle path can be measured (e.g., with ac-
curate GPS), which is the result of the driver’s de-
tection, perception, planning and control behaviour,
together. The environmental inputs, such as the po-
sition of the road edge or other objects, can also be
measured. However, the layers in between cannot be
observed properly from a single sequence of data. By
modelling the drift-away and compensation path, the
vehicle level compensation can be filtered out of the
measured data sequence. This enables the estimation
of the planned lane offset, and contributes to a more
accurate validation of driver models at the path plan-
ning level.
The drift-away and compensation model also con-
tributes to the design of a lane-keeping system with
human-like characteristics. Although the underly-
ing controllers are usually designed to give the best
path accuracy, another possibility is to mimic human
steering characteristics. This can contribute to an in-
creased level of trust in such driving systems. The
results of this paper give important inputs to achieve
more human-like lane following behaviour, on the
other hand requires further analysis with the inclusion
of other domains, such as path planning and actuator
control. We believe that an interesting next research
topic is to build predictive driver models, that enable
the intervention point and the compensation dynam-
ics to be calculated at runtime. It would also be an
exciting challenge to analyse the model parameters
for each driver and find ways to cluster them based
on these parameters.
While the results presented in this paper are
promising and validate the concept on a sample
dataset, these results are limited in their applicabil-
ity. Firstly, the number of drivers tested is limited by
the size of the dataset. Therefore, it is not yet proven
whether the concept is generic to a wider range of
drivers. Secondly, the results are generated by simu-
lation and vehicle control algorithms, such as MPCs,
are very sensitive to real-world conditions (e.g. ac-
curacy of the vehicle model). This may hinder the
realisation of the proposed algorithm.
ACKNOWLEDGEMENT
The research was supported by the European Union
within the framework of the National Laboratory for
Autonomous Systems. (RRF-2.3.1-21-2022-00002).
REFERENCES
Cody, D. and Gordon, T. (2007). Trb workshop on driver
models: A step towards a comprehensive model of
driving? Modelling Driver Behaviour in Automotive
Environments, 1(1):26–42.
Conlter, R. C. (1992). Implementation of the pure pursuit
path tracking algorithm.
D Salvucci, D. and Gray, R. (2004). A two-point visual
control model of steering. Perception, 33(1):1233–
1248.
Erno, H., Csaba, H., and Peter, K. (2019). Novel pure-
pursuit trajectory following approaches and their prac-
tical applications. In Proceedings of the 10th IEEE
International Conference on Cognitive Infocommuni-
cations, pages 1–6, Naples, Italy.
Evans, L. and Schwig, R. C. (1985). Human behavior and
traffic safety. Plenum Press, New York, NY.
Hess, R. and Modjtahedzadeh, A. (1990). A control theo-
retic model of driver steering behavior. IEEE Control
Systems Magazine, 10(5):3–8.
Ign
´
eczi, G. and Horv
´
ath, E. (19-21, September 2024).
Human-like behaviour for automated vehicles
(hlb4av) naturalistic driving dataset, data available at
https://jkk-research.github.io/dataset/jkk dataset 03/.
In IEEE 22nd International Symposium on Intelligent
Systems and Informatics (SISY 2024), Pula, Croatia.
Jiang, H., Tian, H., and Hua, Y. (2019). Model predictive
driver model considering the steering characteristics
of the skilled drivers. Advances in Mechanical Engi-
neering, 11(3):1–14.
Katriniok, A., Maschuw, J. P., et al. (2013). Optimal vehi-
cle dynamics control for combined longitudinal and
lateral autonomous vehicle guidance. In Proceed-
ings of European Control Conference, pages 974–979,
Z
¨
urich, Switzerland.
Klebersberg, D. (1971). Subjektive und objektive sicherheit
im strassenverkehr als aufgabe f
¨
ur die verkehrssicher-
Analysis of Drivers’ Path Follow Behaviour
99

heitsarbeit. Schriftenreihe der Deutschen Verkehr-
swacht, 1(5):3–12.
L, W. (2009). Model Predictive Control System Design and
Implementation using Matlab. Springer, Verlag.
McAdam, C. C. (1980). An optimal preview control for lin-
ear systems. Journal of Dynamic Systems, Measure-
ment and Control, 102(1):188–190.
McKnight, J. A. and Adams, B. B. (1970). Driver Educa-
tion Task Analysis. Human Resources Research Or-
ganisation, Alexandria, Va.
Michon, J. A. (1985). A Critical View of Driver Behavior
Models: What do we know, what should we do? Uni-
versity of Groningen, The Netherlands.
Peng, H. (2005). An adaptive lateral preview driver model.
Vehicle System Dynamics, 1(1):1–17.
Saleh, L., Philippe, C., Mars, F., et al. (2011). Human-
like cybernetic driver model for lane keeping. In Pro-
ceedings of the International Federation of Automatic
Control, pages 4368–4373, Milano, Italy.
Theeuwes, J. (1993). Visual selective attention: a theoreti-
cal analysis. Acta Psychologica, 83(2):93–154.
Wang, R., Li, Y., et al. (2020). A novel pure pur-
suit algorithm for autonomous vehicles based on salp
swarm algorithm and velocity controller. IEEE Ac-
cess, 1(1):166525–166540.
W.H, J. (1979). Routeplanning en geleiding: Een literatu-
urstudie. Report IZF. C-13. Soesterberg (The Nether-
lands): Institute for Perception TNO.
Wilde, G. J. S. (1982). The theory of risk homeostasis:
Implications for safety and health. Risk Analysis,
2(4):209–225.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
100
