
Two-Stage Fault Detection and Control Approach for DFIG-Based
Wind Energy Conversion System
Daison Stallon
1a
, Ichrak Eben Zaid
2b
and Yolanda Vidal
1,3 c
1
Control, Data, and Artificial Intelligence (CoDAlab), Department of Mathematics, Escola d’Enginyeria de Barcelona
Est (EEBE), Universitat Politécnica de Catalunya (UPC), Barcelona, Spain
2
Commande Numérique des Procédés Industriels (CONPRI) National School of Engineers of Gabes,
University of Gabes, Tunisia
3
Institut de Matemátiques de la UPC, BarcelonaTech, IMTech, Pau Gargallo 14, 08028 Barcelona, Spain
Keywords: Wind Turbines, Wind Speed, Fault Diagnosis, Wind Energy Conversion Systems, Control Monitoring,
Doubly Fed Induction Generators, Machine Learning.
Abstract: Doubly-Fed Induction Generator (DFIG)-based Wind Energy Conversion Systems (WECS) are critical in
modern electricity generation due to their ability to enhance energy capture and seamlessly integrate with
the electrical grid. However, maintaining reliability and minimizing maintenance costs are essential to
ensure consistent energy production. This research presents an innovative method for fault detection and
diagnosis in DFIG-based WECS. The approach leverages independent component analysis-based
correlation coefficient for precise fault identification. Additionally, an enhanced multihead cross attention
with bi-directional long short term memory classifier is employed to accurately categorize different fault
types. To further improve classifier’s performance, the multi-strategy enhanced orchard algorithm is
implemented, focusing on regulating active and reactive power variations, harmonics in rotor current, and
voltage in the DC link. The proposed method is evaluated using MATLAB working platform and
demonstrates a high accuracy rate of 98% compared to other techniques.
a
https://orcid.org/0000-0002-1339-6919
b
https://orcid.org/0000-0001-5066-3601
c
https://orcid.org/0000-0003-4964-6948
1
INTRODUCTION
The increasing use of fossil fuels and growing
environmental concerns highlight the urgent need for
clean and sustainable energy sources. Wind energy
has become a vital part of the global energy
landscape, providing 20% of the world’s electricity,
with Wind Turbines (WT) at its core. Consequently,
efficient problem diagnosis and maintenance are
necessary to ensure that WT operates dependably
(Ding et al., 2019; Heilari et al., 2016). Power
electronic converters' fault-tolerant performance in a
variety of applications, including electrical drives,
has been extensively studied in recent years. Zhang et
al. (2014), for instance, talk about fault-tolerant
techniques for multilevel and two-level converters.
Furthermore, Riera-Guasp et al. (2014) offer
information on condition monitoring and fault-
tolerant operation for electric drives and other
equipment.
Moreover, a fault-tolerant control strategy for a
T-type three-level inverter is presented which
guarantees a decrease in power and output voltage
distortions in the event of an open circuit fault.
Despite the paucity of research on fault tolerance in
Wind Energy Conversion Systems (WECSs),
provides a fault-tolerant topology using a five-leg
converter configuration for the grid side converter’s
post-fault operation in PMSG-based systems. An
alternative approach is presented, wherein the output
phases are connected to the dc-link post-fault
detection midway.
Practicality is limited, though, as this arrangement
causes grid-side converter switch voltages to double
in the post-fault mode (Li, Y et al. 2020; Tumari, M
et al. 2022; Dou, B et al. 2020). To eliminate current
Stallon, D., Zaid, I. E. and Vidal, Y.
Two-Stage Fault Detection and Control Approach for DFIG-Based Wind Energy Conversion System.
DOI: 10.5220/0012891900003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 1, pages 209-216
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
209
distortion post-fault, research suggests faulttolerant
control for open-switch faults in three-level neutral
point clamped converters of Permanent Magnet
Synchronous Generator (PMSG) based systems by
using d-axis current injection. References (SaeKok et
al., 2010), examined the reconfiguration post-fault
diagnosis and converter defects in DFIG. Kanjiya et
al. (2013) presented a fault-tolerant Power Electronic
(PE) structure by substituting a nine-switch Grid Side
Converter (GSC).
While grid failures are covered in (Li et al.,
2014), converter faults are not mentioned. Shi and
Patton (2015) explain current sensor malfunctions
and introduce a new current observer to enhance fault
detection. In order to overcome these problems, Gao
et al. (2015a) investigate malfunctions in pitch and
generator speed sensors and suggest an observer-
based active fault-tolerant control technique.
Timely defect detection is critical to all fault-
tolerant
systems. A wealth of information on defect
diagnostic techniques has been published recently,
including surveys such as (Gao et al., 2015b).
Various research papers have existed in the
literature
based on fault analysis in wind energy using
various techniques and aspects. Tuerxun et al.
(Tuerxun et al., 2021) introduced the SSA-SVM
(Sparrow Search Algorithm-Support Vector
Machines) model, an efficient approach that
outperforms existing methods for enhancing
diagnostic accuracy and applicability of WT. Zhang
et al. (Zhang et al., 2022) introduced a CVAE-GAN
(Conditional Variational Generative Adversarial
Network)-based strategy, enhancing the diagnostic
precision of WT in complex scenarios.
Kong et al. (Kong et al., 2021) introduced an
adaptive noise reduction technique known as
CDWPSO (Chaotic Dynamic Weight Particle Swarm
Optimization with Sigmoid-Based Acceleration
Coefficients), aimed at enhancing the diagnosis of
bearing faults in WT.
Hsu et al. (Hsu et al., 2020) employed a statistical
process control and machine learning on 2.8 million
sensor data to diagnose WT faults and predict
maintenance needs with high accuracy, improving
operational efficiency and reducing downtime. Qi et
al. (Qi et al., 2023) presented the WJDAN (Weighted
Joint Domain Adversarial Network) as an innovative
approach for improving cross-domain fault diagnosis
in WT. This research makes the following significant
contributions:
• To handle the non-stationary nature of vibration
signals originating from WECS, the research
uses the Independent Component Analysis-
based Correlation Coefficient (ICA-CC)
method, particularly within the timefrequency
domains.
• The research encompasses the process of
training an Enhanced Multihead Cross
Attention with BiLSTM (EMCABN) classifier,
that is specifically designed for categorizing
different types of faults in WECS.
• Furthermore, the research involves the
optimization of critical parameters within the
EMCABN model.
• This optimization is carried out using the Multi-
strategy Enhanced Orchard Algorithm
(MSEOA)
for controlling the variations in
active and reactive powers, harmonics in rotor
current, and the voltage in the dc-link.
The research is organized into distinct sections:
Section 2 outlines the proposed control methodology
mechanism, Section 3 discusses implementation
results, and Section 4 offers a comprehensive
conclusion summarizing the entire work.
2
PROPOSED SYSTEM UNDER
INVESTIGATION
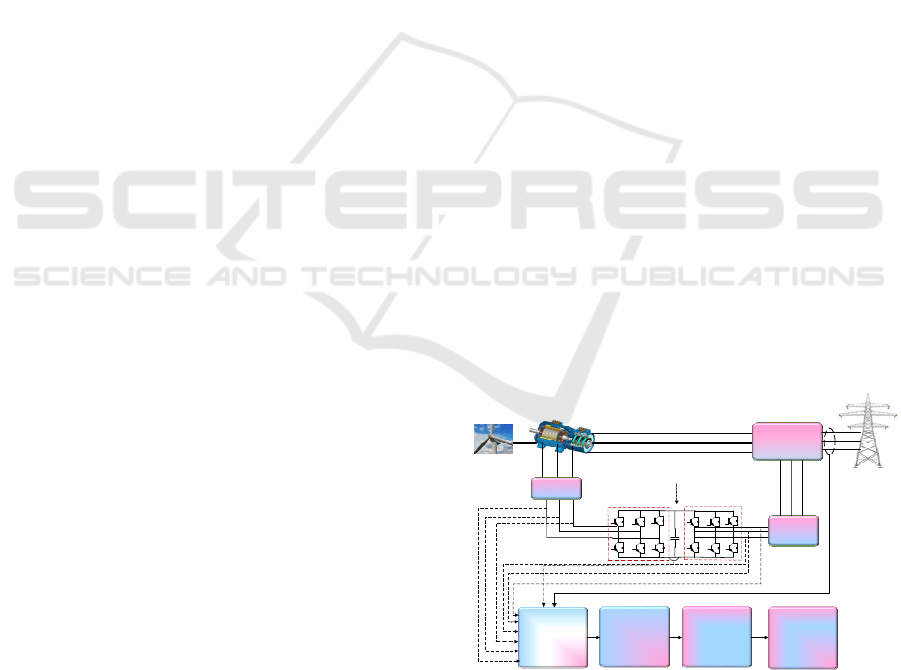
The data processing system depicted in Figure 1 for
WT fault detection and classification represents a
cutting-edge and comprehensive approach to
ensuring the reliability and safety of WT while also
mitigating maintenance costs.The present framework
comprises the following primary steps for the goal of
defect identification and classification:
DFIG
Rotor side
converter
Grid s ide
converter
Interconnection
transfor mer
Grid
Filter
Filter
Independent
Component Analysis
based C orrelation
Coefficient (ICA-CC)
method
Enhanced
Multihead Cross
Attention with
BiLSTM Network
(EMCABN)
Optimization of
EMCABN parameters
using Multi-strategy
Enhanced Orchard
Algorithm (MSEOA)
Data collection and
signal processing
Power signal (active
and reactive)
DC link
capacitor
Stage 1
Fault control phase
Fault classification
phase
Fault identification
phase
Phase C grid current
Phase B grid current
Phase A grid current
Phase C rotor current
Phase B rotor current
Phase A rotor current
DC link voltage
1
S
3
S
5
S
6
S
4
S
2
S
01
V
1
S
3
S
5
S
6
S
4
S
2
S
Figure 1: Structure of proposed methodology.
Data Collection: Under various operating
conditions, the process records different
measurements. The gathered data depicts both
optimal and several potentially flawed scenarios that
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
210

I
may arise during the process. It can be split into two
sets, one for testing and the other for training.
Denoising Process: Firstly, use the wavelet threshold
denoising method to denoise the defected voltage
signal, then the denoised voltage signal is subjected
to ICA-CC model to produce a series of components.
Feature Extraction: When the system is functioning
normally, an ICA-CC model is constructed solely
from the training data set. The ICA-CC model
extracts a collection of characteristics where the
original data's information becomes less and less
important. As a result, the features that are most
frequently caught are retained and show how the data
is projected onto a subspace that is determined
by fewer total projector directions. Given that it has a
substantial impact on the classification performance,
this quantity was chosen with sufficient care. The
combined probabilities of the chosen features across
the various process scenarios are computed. An ICA-
CC model with five directions has been built based
on the most important information that was projected
from the data.
Fault Detection and Classification: During the
training phase, EMCABN demonstrates a potential
capacity to identify each of the WT's various
operating circumstances. The quantity of situations
determines the EMCABN structure. As a result, each
scenario is given a matching state. The intermediate
transitions between all EMCABN states are defined
manually based on certain requirements and for
large-sized data. Conversely, estimating the
transition probabilities is more feasible in the
univariate scenario. The EMCABN parameter triplet
is defined once it has been trained, and its
effectiveness is evaluated using a testing setup.
Fault Control: Wind speed, rotor speed, generator
temperature, voltage, and current are the inputs of
the system. Using these inputs, fault control actions
are implemented, such as adjusting pitch angle, yaw
control, braking, or activating protection
mechanisms to mitigate fault effects and ensure safe
and efficient WECS operation. The mechanism is
done using MSEOA.
2.1
Fault Identification Phase Using
ICA-CC
In the fault detection phase of the DFIG-based
WECS, the independent component analysis-based
correlation coefficient (ICA-CC) is used to isolate
and identify fault signatures from the system's
operational data. The ICA-CC method effectively
separates the mixed signals into independent
components, allowing for precise detection of
anomalies indicative of faults.
Monitoring statistics include active and reactive
power variations, harmonics in rotor currents, and
voltage fluctuations in the DC link. These
parameters are continuously monitored to establish
baselines and identify deviations that may signal a
fault. Thresholds for each parameter are set based on
historical data, and any significant deviation triggers
an alert. The enhanced multihead cross attention
with BiLSTM classifier then categorizes the fault
type based on the identified patterns, ensuring
accurate and timely diagnosis. The monitoring
statistics are crucial in this phase, as they provide the
necessary data to detect and classify faults
efficiently.
Fault Detection:
Input Parameters: Decrease in wind speed, abnormal
generator temperature rise, and fluctuations in
electrical grid voltage.
Output: Detection of anomalies in the system’s
behavior, triggering an alarm for further
investigation.
Based on this, the measured data matrix is
represented in the following:
EASX +=
(1)
Where X represents the measured data matrix, S
represents the independent component matrix, and A
represents the mixing matrix. To find the separation
matrix W, the reconstructed matrix S
ˆ
is derived as
follows:
WXS =
^
(2)
To derive the detection logic, the thresholds are
established first, followed by the application of the
corresponding logic:
−≥≥
−<<
occurredfaultJSPEJI
freefaultJSPEJI
thSPE
I
thSPE
I
th
th
,
2
,
2
&
&
2
2
(3)
where estimated thresholds are expressed as J
2
and
J
SPE,th
, the unit matrix is expressed as I.
2.2 Fault Classification Phase Using
EMCABN
The fault classification phase in DFIG-based WECS
leverages the Enhanced Multihead Cross Attention
with BiLSTM Network (EMCABN) to accurately
categorize various fault types (Leng, X.L et al.
2021). This advanced model combines the strengths
of multihead attention mechanisms and BiLSTM
Two-Stage Fault Detection and Control Approach for DFIG-Based Wind Energy Conversion System
211
networks. The model can focus on various input data
points at once thanks to the multihead cross attention
method, which helps it identify complex patterns
linked to various defects. The BiLSTM component,
with its bidirectional processing, ensures that
temporal dependencies in the data are effectively
utilized, leading to a more accurate fault
classification.
EMCABN excels in handling complex, nonlinear
relationships within the system, enabling it to
differentiate between subtle fault signatures. By
integrating this approach, the model can classify
faults with high precision, which is essential for
timely intervention and maintenance in WECS. The
performance of EMCABN is further enhanced by
optimizing its parameters using the Multi-strategy
Enhanced Orchard Algorithm (MSEOA), ensuring
robust classification under various operational
conditions.
Fault Classification:
Input Parameters: Detected anomalies and historical
fault data.
Output: Classification of faults into categories such
as mechanical faults (e.g., bearing failure), electrical
faults (e.g., short-circuit in the generator), or
gridrelated faults (e.g., voltage instability).
It incorporates the forward hidden layer denoted
as L
f
w
, the backward hidden layer L
bw
and the output
GHI
Op
for network updates. The network undergoes
iterative updates, proceeding both in the backward
direction, beginning T to 1 and in the forward
direction, beginning 1 to T. The mathematical
expression for the layers of the EMCABN technique
is formulated as follows:
f
Lfifw
bLwtGHIwL ++=
−121
)((
σ
(4)
b
Lbibw
bLwtGHIwL ++=
−153
)((
σ
(5)
O
GHIfOp
bLwLwGHI ++=
64
(6)
where, L
f
w
represents forward bias, L
bw
represents
backward pass, GHI
Op
represents the final output
layers. σ represents standard deviation, w represents
the weight coefficients, and b
L
f
, b
L
b
, and b
GHI
O
defines the biases in the model.
2.3 Fault Control Phase Using MSEOA
The practical implementation of a multi-objective
framework for WT fault detection is discussed in
this section. This framework's main goal is to
maximise EMCABN. The objective function for the
proposed system is formulated in the following.
],,,,,,[
)(min
,,,,
QPVIVIVE
EfunctionObjective
abcgabcgabcrabcrDC
=
=
(7)
where, error is specified as E which mainly defines
the minimization of voltage, current and power
variation in the WECS. V
DC
represents dc-link
voltage, I
r,abc
, V
r,abc
represents three phase rotor
current and voltage, I
g,abc
, V
g,abc
represents three
phase grid current and voltage, P represents active
power, Q represents reactive power, ’min’ represents
minimize.
Fault Control:
Input Parameters: Identified fault types and system
configuration.
Output: Implementation of control actions such as
adjusting pitch angle to reduce load on the turbine or
activating protection mechanisms to isolate faulty
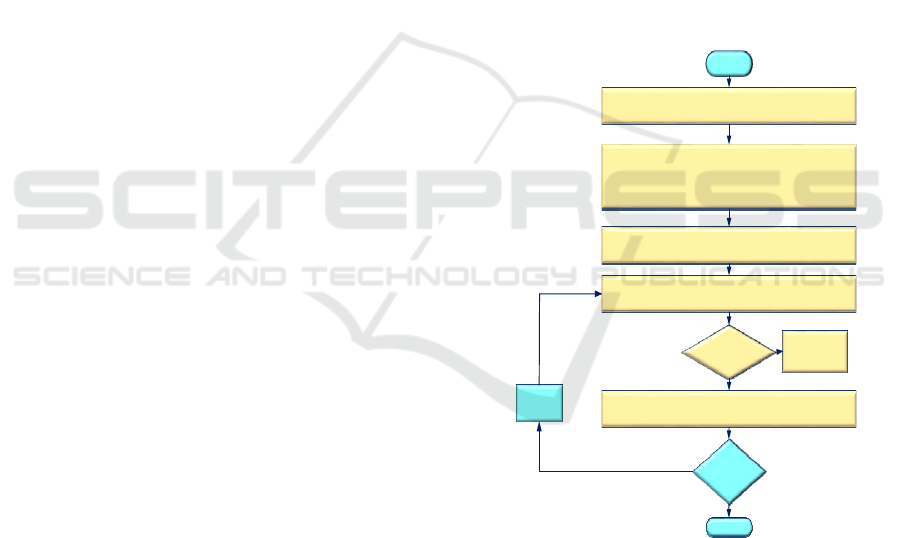
components. Pseudocode and flowchart of MSEOA
is shown in Figure 2 respectively.
Begin
Initialize Objective function
Calculate the optimal fitness position
The optimal solution is replaced
Update the orchard seedlings
If the growth years
number finished?
Replace the seedlings of weak-one with new one
If condition
statisfied?
End
t=t+1
Update the growth
of new seedlings
Yes
No
No
Yes
],,,,,,[
)(min
,,,,
QPVIVIVError
ErrorfunctionObjective
abcgabcgabcrabcrDC
=
=
Figure 2: Flowchart of MSEOA Algorithm.
2.4 Step-by-Step Explanation of
Multi-Strategy Enhanced Orchard
Algorithm (MSEOA)
According to the Orchard Algorithm (OA),
exploration is the movement of candidate
individuals in the direction of the ocean current,
whereas exploitation is the movement of candidate
individuals within the swarm. Temporal control
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
212
−
−
parameters regulate how these two phases transition
into one another. In Kaveh et al., 2023.
In order to find potential areas, the OA focusses on
exploration in the beginning of an iteration.
Ultimately, though, the OA favors exploitation to
identify the optimal spot inside the designated
region.
The algorithm's capacity for local exploration
and convergence are enhanced by the sine and
cosine learning factors approach. The ability to
participate in global exploitation and to break free
from the trap of local optimization is both improved
by the local escape operator method. Opposition
Based Learning (OBL) and Quasi Oppositional
Learning (QOL) approaches increase the population
solution quality and expand the pool of possible
persons, which improves optimization competency.
An MSEOA is created by integrating the OA with
these three tactics. In order to solve optimisation
difficulties, MSEOA integrates multiple
sophisticated methodologies, building upon the
fundamentals of OA. To improve the OA, it
combines generalised oppositional learning,
quadratic interpolation, and orthogonal learning.
Generalised oppositional learning enhances initial
population quality and convergence, quadratic
interpolation improves the accuracy of global
searches, and orthogonal learning helps escape local
optima. When combined, these tactics improve OA
performance, especially for high-dimensional and
complicated issues. The comprehensive steps of the
MSEOA are summed up in the following to
represent the aforementioned phases.
Step 1. Start by initializing a population of
solutions randomly. Each solution represents a
potential answer to the optimization problem, and
the population size determines the number of
solutions considered at each iteration. Define
necessary parameters, such as the number of
iterations, the search space boundaries, and the
learning rates. Initialize specific parameters for each
strategy used within the algorithm. Establish N =
300 and T = 200, specify the fitness function, and
use the logistic maps provided by to create the
starting locations of N seedlings in the solution search
space. P
i+1
= αP
i
(1 P
i
), 0 ⩽ P
0
⩽ 1 and let t = 1.
Step 2. Assess and contrast the objective value of
every contender, and record the best location thus far
along with the matching optimal objective value.
Evaluate the fitness of each solution using an
objective function. This function quantifies how well
each solution solves the problem. In DFIG-based
WECS, for instance, it could measure how well the
algorithm controls power variations and harmonics.
Rank the solutions based on their fitness. The better
the solution, the higher its rank.
Step 3. Growth of the seedlings. Compute the time
control function C(t). If C(t) > 0.5, the candidate
individual
()
tP
i
tracts the growth for each seedling,
screening of the seedlings and graft for each seedling
()
1+tP
i
is renewed using
() ()
(
)
μβ
××−×+=+
∗
221 rPrtPtP
ii
.
Where constants is denoted as
β
,
μ
, random
number is expressed as
2
r
, deviated updated
position is denoted as
∗
P
.
Step 4. Replacement of the weak seedlings by the
new ones. If
() ()()
tC11,0rand −>
, Type A
movement is performed by the candidate, and the
new position is determined using
() () ( )
LbUbrtPtP
ii
−××+=+ 31
γ
.
Otherwise, the candidate engaged in Type B
movement, and the updated position makes use of
() ()
(
)
()
()
tPPsteptPtP
iii
−++=+
*
21
..1
ωω
.
Where, upper bound and lower bound is expressed
as
LbUb,
, constant for seedlings is expressed as
γ
,
step
is expressed as step function.
Step 5. Verify the modified individual solution to
see if it exceeds the boundary condition. If it is
outside the scope of the search,
−+
+
=
d
i
dd
dd
d
i
PUbLb
UbLb
randP ,
2
is used to
return to the opposite boundary.
Step 6. Examine the current location's objective
cost both before and after upgrading. Replace the
site if the grafted seedlings are more fit than the
existing one. Next, compare the ideal fitness value to
the objective value of the existing place. Renew the
best location so far found and the accompanying
ideal objective value if the objective value at the
current position is superior.
Step 7. If t < T, go back to Step 3, otherwise,
perform Step 8.
Step 8. The optimal solution is the one that
remains after the algorithm converges and finds the
best solution. Next, this solution is implemented in
the problem domain, e.g., DFIG-based WECS fault
categorisation. In order to confirm the solution's
Two-Stage Fault Detection and Control Approach for DFIG-Based Wind Energy Conversion System
213
resilience, evaluate the outcomes once more and, if
necessary, validate the results against different
benchmarks.
3
RESULTS AND DISCUSSION
The research uses a benchmark model that uses the
MATLAB software to simulate a modern WT in
order to evaluate the efficacy of this strategy
(Xiahou, K.S et al 2020). The dataset consisting of
images related to these fault scenarios, is divided
into two subsets through a random split. Details on
the number of variables assessed, the total number of
samples, and the percentage of data allotted to
training and testing should all be included in the
EMCABN dataset.
Usually, 80% of the data is used for training and
20% is used for testing; however, this could change
depending on the study. The Multihead Cross
Attention mechanism improves the model's focus on
pertinent portions of the input data, enhancing
overall performance in tasks like time series
prediction or classification. The EMCABN catches
both past and future information in the sequence.
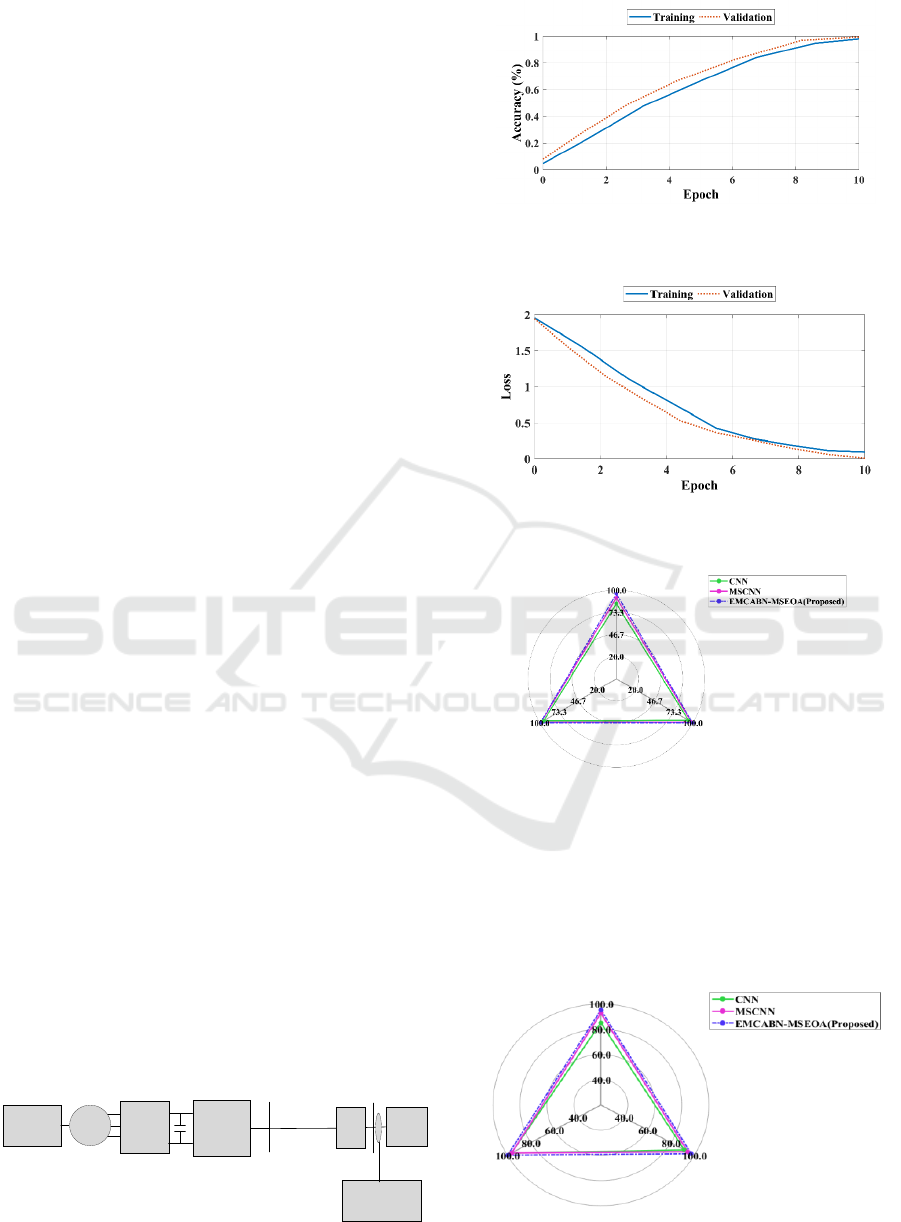
Simulink block setup of the proposed system is
shown in Figure 3.
Approximately 75% of these images are
allocated for detection within the EMCABN, while
the remaining 25% are reserved for the classification
task.
Figure 4 shows the average accuracy of the
EMCABN-MSEOA machine learning model over
the course of training. The validation accuracy
reaches a maximum of about 98% at around epoch
10. The proposed EMCABN detects the WT faults
with remarkable average accuracy of 98%. The
Figure 5 shows the training and validation loss of a
machine learning model over the course of training.
The results, shown in Figure 6, indicate that
EMCABN-MSEOA benefit from increased depth.
Notably, EMCABN-MSEOA models with two or
three layers achieved performance, reaching an F1
score of about 98%. This represents a substantial 7%
improvement over the single-layer
EMCABNMSEOA model.
Wind Turbine
Grid
s
V
L
V
Grid sid e
converter
Rotor side
converter
Proposed algorithm
Filter
Grid
Figure 3: Simulink block setup of the proposed system.
Figure 4: Average accuracy of the EMCABN-MSEOA
model.
Figure 5: Average losses of the EMCABN-MSEOA
model.
Figure 6: Comparison for efficient diagnosis of WT fault
with proposed and conventional techniques.
In Figure 7, the evaluation compares
EMCABNMSEOA, MSCNN, and CNN using
average F1 scores across eight conditions as the
evaluation metric. Table 1 offers a comprehensive
and wellrounded analysis by synthesizing the results
from 50 randomly conducted trials.
Figure 7: Comparison for efficient diagnosis of noise with
proposed and conventional techniques.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
214
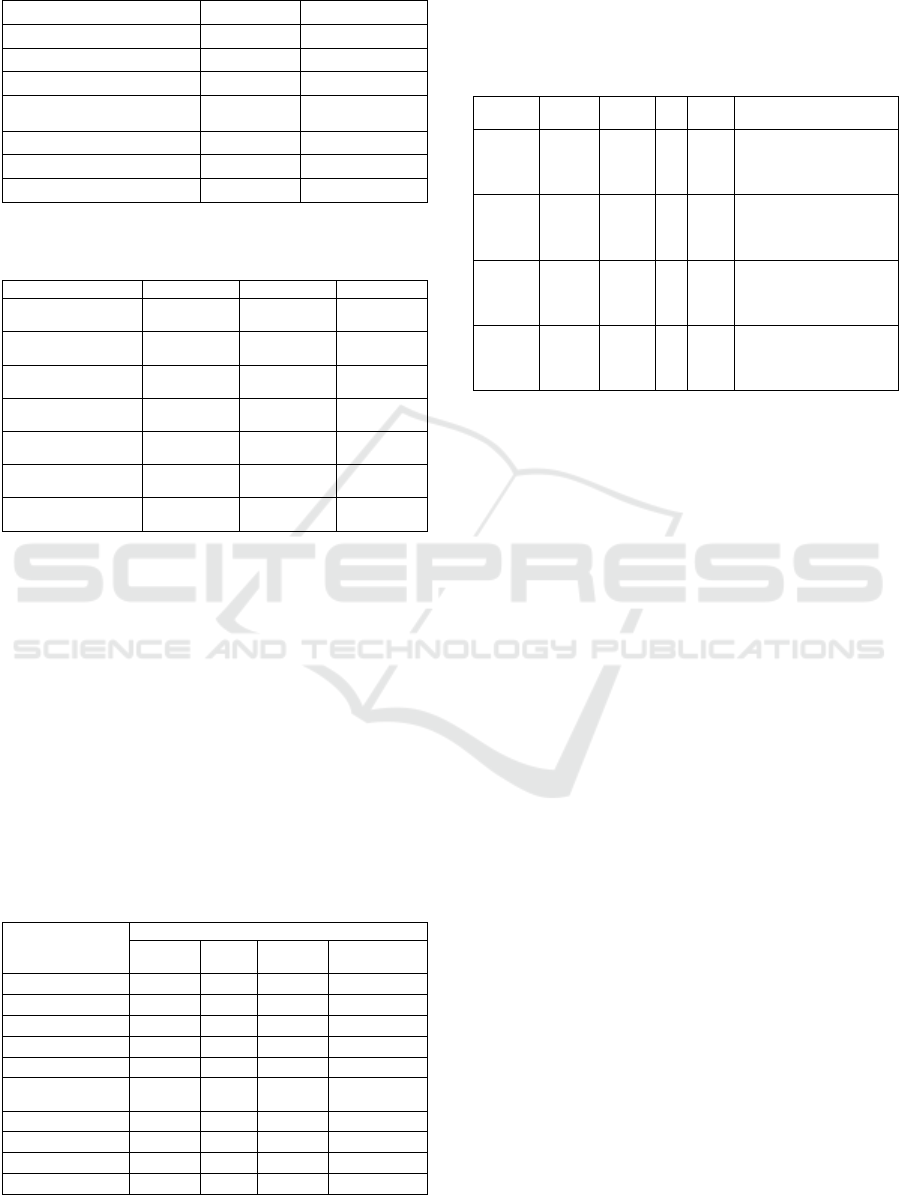
Table 1: Comparison of solution techniques for 50 random
trails.
Techniques F
1
Score (%) Detection time (s)
CNN (Zare and Ayati, 2021) 98.82±0.0050 36.7318±0.2197
MSCNN (Zare and Ayati, 2021) 98.57±0.0038 14.5388±0.2247
EMCABN-MSEOA 98.05±0.0058 14.5995±0.1756
Techniques
Classification
time (ms)
Control time(s)
CNN (Zare and Ayati, 2021) 0.4884±0.0023 6.56
MSCNN (Zare and Ayati, 2021) 0.1806±0.0025 4.19
EMCABN-MSEOA 0.1814±0.0022 2.65
Table 2: Comparison of solution techniques for 50 random
trails.
Techniques Control level 1 Control level 2 Control level 3
CNN
(
Zare and A
y
ati, 2021
)
80.41±4.32 86.92±2.84 72.50±5.40
MSCNN
(
Zare and A
y
ati, 2021
)
71.01±1.04 70.42±2.32 62.70±3.04
EMCABN-
MSEOA
97.34±0.96 98.20±0.72 96.76±1.46
Techniques
Control
level 4
Control
level 5
Average
CNN
(
Zare and A
y
ati, 2021
)
96.93±2.99 78.95±3.21 84.31
MSCNN
(Zare and Ayati, 2021)
72.09±1.97 71.30±1.57 72.71
EMCABN-
MSEOA
98.94±0.85 99.05±0.69 98.33
Within Table 2, a comprehensive comparative
assessment is presented, utilizing percentage scores
as the evaluative metric. Statistical comparative
analysis is shown in Table 3. The performance of
proposed technique is compared with existing
approaches (Dhibi, K et al. 2022) such as NN-based
EL (NN-EL), Reduced NN-EL, Neural Network
(NN), Bagging ensemble, Random Forest ensemble,
Cascade Forward Neural Network (CFNN), Multiple
Layers (MNN), Feed-Forward Neural Network
(FFNN), and Generalized Regression Neural
Network (GRNN).
The proposed method gives better results in
terms of statistical analysis.
Table 3: Statistical comparative analysis.
Methods
Global performances
Accuracy Recall Precision
Computational
time (s)
Proposed 99.98 99.987 99.987 27.01
GRNN 97.01 97.01 97.01 99.14
FFNN 97.17 97.18 97.17 126.45
MNN 93.58 93.58 93.58 51.30
CFNN 97.41 97.41 97.40 186.82
Random Forest
ensemble
98.41 98.41 98.42 261.3
Bagging ensemble 98.31 98.31 98.31 197.12
NN 93.70 93.71 93.70 47.01
Reduced NN-EL 99.95 99.95 99.95 141
NN-EL 99.97 99.97 99.97 386
Table 4 displays the results of the Wilcoxon
signed-rank test comparison (Fathy, A. et al., 2022).
The suggested approach differs dramatically, with a
95% confidence level.
Table 4: Wilcoxon signed-rank test comparison results.
Method Negative
ranks
Positive
ranks
Ties Z Decision regard (30 runs)
GA-PSO 5
a
25
b
0
c
-3.918
d
a. GA < PSO
b. GA > PSO
c. GA = PSO
d. Based on ne
g
ative ranks
FPA-GA 30
a
0
b
0
c
-4.782
d
a. FPA < GA
b. FPA > GA
c. FPA = GA
d. Based on
p
ositive ranks
FPA-PSO 30
a
0
b
0
c
-4.782
d
a. FPA < PSO
b. FPA > PSO
c. FPA = PSO
d. Based on
p
ositive ranks
Proposed 35
a
0
b
0
c
-5
d
a. Proposed<FPA-GA
b. Proposed >FPA-GA
c. Proposed=FPA-GA
d. Based on
p
ositive ranks
4
CONCLUSIONS
This work confirms the efficacy of the
EMCABNMSEOA method in processing signal
images for intelligent WT fault diagnosis, which
improves system reliability and reduces the need for
human interpretation. The methodology is shown to
be proficient at detecting faults and accelerating the
decision-making process, thereby decreasing the
dependence on human expertise for signal feature
extraction. Variable wind speeds, a significant factor
influencing WT performance, are incorporated into
the analysis. Utilizing data across various wind
speeds ensures that the approach reflects real-life
scenarios. When compared to other artificial neural
networks, the Independent Component Analysis-
based Correlation Coefficient (ICA-CC) is notable
for its ability to directly extract optimal features
from raw data, although it does necessitate a
considerable amount of training data. Additionally,
the EMCABN-MSEOA method is characterized by
its computational efficiency and an impressive
classification accuracy rate of 98%, representing a
notable improvement. Future works are planned to
apply this method to actual vibration data from WT
gearboxes in wind farms to confirm its practical
value in improving operational WT fault diagno sis.
ACKNOWLEDGEMENTS
This work was supported by the Spanish Agencia
Two-Stage Fault Detection and Control Approach for DFIG-Based Wind Energy Conversion System
215

Estatal de Investigacio´n (AEI) Ministerio de
Econom´ıa, Industria y Competitividad (MINECO),
and the Fondo Europeo de Desarrollo Regional
(FEDER) through the research projects
PID2021122132OB-C21 and TED2021-129512B-
I00; and by the Generalitat de Catalunya through the
research project 2021-SGR-01044.
REFERENCES
Dou, B., Qu, T., Lei, L. and Zeng, P., (2020). Optimization
of wind turbine yaw angles in a wind farm using a
three-dimensional yawed wake model. Energy, 209,
p.118415.
Ding, P., Wang, H., Bao, W., and Hong, R. (2019).
Hygpmsam based model for slewing bearing residual
useful life prediction. Measurement, 141:162–175.
Dhibi, K., Mansouri, M., Bouzrara, K., Nounou, H. and
Nounou, M., (2022). Reduced neural network based
ensemble approach for fault detection and diagnosis of
wind energy converter systems. Renewable Energy,
194, pp.778-787.
Fathy, A., Rezk, H., Yousri, D., Kandil, T. and Abo-Khalil,
A.G., (2022). Real-time bald eagle search approach for
tracking the maximum generated power of wind energy
conversion system. Energy, 249, p.123661.
Gao, Z., Cecati, C., and Ding, S. X. (2015a). A survey of
fault diagnosis and fault-tolerant techniques—part i:
Fault diagnosis with model-based and signal-based
approaches. IEEE transactions on industrial
electronics, 62(6):3757–3767.
Gao, Z., Cecati, C., and Ding, S. X. (2015b). A survey of
fault diagnosis and fault-tolerant techniques—part i:
Fault diagnosis with model-based and signal-based
approaches. IEEE transactions on industrial
electronics, 62(6):3757–3767.
Heidari, M., Homaei, H., Golestanian, H., and Heidari, A.
(2016). Fault diagnosis of gearboxes using wavelet
support vector machine, least square support vector
machine and wavelet packet transform. Journal of
Vibroengineering, 18(2):860–875
Hsu, J.-Y., Wang, Y.-F., Lin, K.-C., Chen, M.-Y., and Hsu,
J. H.-Y. (2020). Wind turbine fault diagnosis and
predictive maintenance through statistical process
control and machine learning. Ieee Access, 8:23427–
23439.
Kanjiya, P., Ambati, B. B., and Khadkikar, V. (2013). A
novel fault-tolerant dfig-based wind energy conversion
system for seamless operation during grid faults. IEEE
Transactions on Power Systems, 29(3):1296– 1305.
Kaveh, M., Mesgari, M.S. and Saeidian, B., (2023).
Orchard Algorithm (OA): A new meta-heuristic
algorithm for solving discrete and continuous
optimization problems. Mathematics and Computers in
Simulation, 208, pp.95-135.
Kong, X., Xu, T., Ji, J., Zou, F., Yuan, W., and Zhang, L.
(2021). Wind turbine bearing incipient fault diagnosis
based on adaptive exponential wavelet threshold
function with improved cpso. Ieee Access, 9:122457–
122473.
Leng, X.L., Miao, X.A. and Liu, T., (2021). Using
recurrent neural network structure with enhanced
multi-head self-attention for sentiment analysis.
Multimedia Tools and Applications, 80, pp.12581-
12600.
Li, Y., Wei, K., Yang, W. and Wang, Q., (2020).
Improving wind turbine blade based on multi-objective
particle swarm optimization. Renewable Energy, 161,
pp.525-542
Li, H., Yang, C., Hu, Y., Zhao, B., Zhao, M., and Chen, Z.
(2014). Fault-tolerant control for current sensors of
doubly fed induction generators based on an improved
fault detection method. Measurement, 47:929–937.
Qi, H., Han, Y., Tuo, S., and Zhao, Q. (2023). Fault
diagnosis in wind turbines based on weighted joint
domain adversarial network under various working
conditions. IEEE Sensors Journal.
Riera-Guasp, M., Antonino-Daviu, J. A., and Capolino, G.
A. (2014). Advances in electrical machine, power
electronic, and drive condition monitoring and fault
detection: State of the art. IEEE Transactions on
Industrial Electronics, 62(3):1746–1759.
Sae-Kok, W., Grant, D., and Williams, B. (2010). System
reconfiguration under open-switch faults in a doubly
fed induction machine. IET Renewable Power
Generation, 4(5):458–470.
Shi, F. and Patton, R. (2015). An active fault tolerant
control approach to an offshore wind turbine model.
Renewable Energy, 75:788–798.
Tuerxun, W., Chang, X., Hongyu, G., Zhijie, J., and
Huajian, Z. (2021). Fault diagnosis of wind turbines
based on a support vector machine optimized by the
sparrow search algorithm. Ieee Access, 9:69307–69315.
Tumari, M.Z.M., Ahmad, M.A., Suid, M.H. and Ghazali,
M.R., (2022), December. Data-driven control based on
marine predators algorithm for optimal tuning of the
wind plant. In 2022 IEEE International Conference on
Power and Energy (PECon) (pp. 203-208). IEEE.
Xiahou, K.S., Liu, Y., Li, M.S. and Wu, Q.H., (2020).
Sensor fault-tolerant control of DFIG based wind
energy conversion systems. International Journal of
Electrical Power & Energy Systems, 117, p.105563.
Zare, S. and Ayati, M. (2021). Simultaneous fault diagnosis
of wind turbine using multichannel convolutional
neural networks. ISA transactions, 108:230–239.
Zhang, L., Zhang, H., and Cai, G. (2022). The multiclass
fault diagnosis of wind turbine bearing based on
multisource signal fusion and deep learning generative
model. IEEE Transactions on Instrumentation and
Measurement, 71:1–12.
Zhang, W., Xu, D., Enjeti, P. N., Li, H., Hawke, J. T., and
Krishnamoorthy, H. S. (2014). Survey on fault-tolerant
techniques for power electronic converters. IEEE
Transactions on Power Electronics, 29(12):6319–6331.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
216
