
SportsNGEN: Sustained Generation of Realistic Multi-Player Sports
Gameplay
Lachlan Thorpe
1
, Lewis Bawden
1
, Karanjot Vendal
1
, John Bronskill
2
and Richard E. Turner
2
1
Hawk-Eye Innovations Ltd., U.K.
2
University of Cambridge, U.K.
Keywords:
Sports Simulation, Tennis, Football, Coaching.
Abstract:
We present a transformer decoder based sports simulation engine, SportsNGEN, trained on sports player and
ball tracking sequences, that is capable of generating sustained gameplay and accurately mimicking the deci-
sion making of real players. By training on a large database of professional tennis tracking data, we demon-
strate that simulations produced by SportsNGEN can be used to predict the outcomes of rallies, determine the
best shot choices at any point, and evaluate counterfactual or what if scenarios to inform coaching decisions
and elevate broadcast coverage. By combining the generated simulations with a shot classifier and logic to
start and end rallies, the system is capable of simulating an entire tennis match. We evaluate SportsNGEN by
comparing statistics of the simulations with those of real matches between the same players. We show that the
model output sampling parameters are crucial to simulation realism and that SportsNGEN is probabilistically
well-calibrated to real data. In addition, a generic version of SportsNGEN can be customized to a specific
player by fine-tuning on the subset of match data that includes that player. Finally, we show qualitative results
indicating the same approach works for football.
1 INTRODUCTION
The application of machine learning methods has
proven beneficial to many sports applications (Zhao
et al., 2023). In particular, sports simulation and
analysis can provide valuable insights to sports teams
when attempting to understand how small changes to
player formation or playing style could impact the
next period of play, or their chances of winning (Hauri
and Vucetic, 2022; Teranishi et al., 2022; Wang et al.,
2023). In addition, realistic gameplay simulation is
critical in computer gaming scenarios (Kurach et al.,
2020).
Tremendous progress has been made in the area of
sports trajectory prediction (Yue et al., 2014; Zheng
et al., 2016; Le et al., 2017b; Zhan et al., 2019; Li
et al., 2021; Tang et al., 2021; Wu et al., 2021; Alcorn
and Nguyen, 2021; Omidshafiei et al., 2022), how-
ever it is difficult to precisely mimic training data over
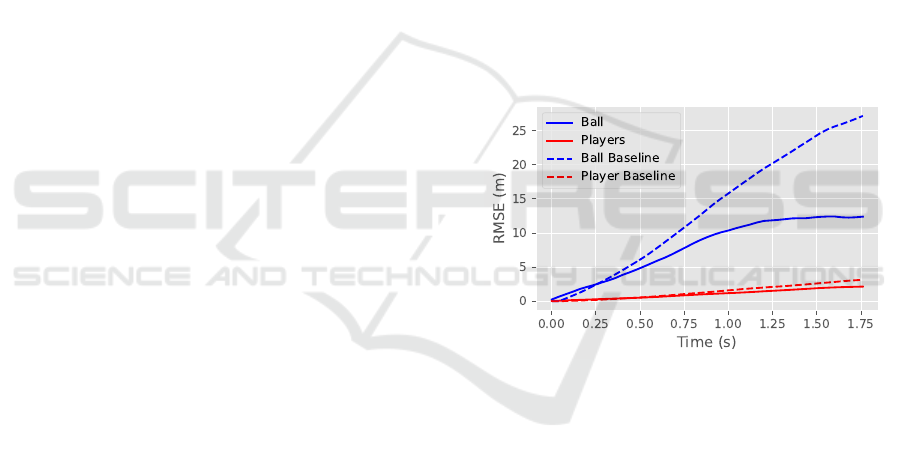
long periods of time. Figure 18 shows how the pre-
diction error of the player and ball positions increases
with time when simulated tennis data from our sys-
tem is compared to the training data. Sports are inher-
ently unpredictable over time scales longer than sev-
eral seconds and as a result, deterministic prediction
is not possible or useful in many scenarios. Instead, it
is important to capture the different ways a match will
evolve in a statistically accurate manner by modelling
the complete distribution of player decision making.
We propose that generated sports simulations
should be: (i) highly realistic and capture the com-
plete distribution of real player behaviour; (ii) sus-
tained for the duration between natural breaks in the
gameplay; (iii) customizable via fine-tuning or other
method to emulate the style of play of a particular
player and/or team; and (iv) measurable in that met-
rics are available to evaluate the quality of the simu-
lations (as opposed relying on a human expert) such
that the simulations can be improved by optimizing
the metrics.
Recently, the transformer architecture (Vaswani
et al., 2017) has been applied to multi-agent spa-
tiotemporal systems problems to generate realistic
sports simulations and understand player behavioural
patterns (Alcorn and Nguyen, 2021). Instead of gen-
erating words as in natural language processing, tem-
poral player and ball movements can be generated by
training a transformer model to predict the next posi-
tion from a sequence of tracking data.
However, to the best of our knowledge, no pre-
Thorpe, L., Bawden, L., Vendal, K., Bronskill, J. and Turner, R. E.
SportsNGEN: Sustained Generation of Realistic Multi-Player Sports Gameplay.
DOI: 10.5220/0012892000003828
In Proceedings of the 12th International Conference on Sport Sciences Research and Technology Support (icSPORTS 2024), pages 119-130
ISBN: 978-989-758-719-1; ISSN: 2184-3201
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
119

a) t = 0 s b) t = 2.0 s c) t = 3.1 s
d) t = 4.1 s e) t = 5.2 s f) t = 7.0 s
Figure 1: Frames from a football match simulated using SportsNGEN. The panels depict a passing sequence involving 3 play-
ers. The ball is in the red circle, with an arrow depicting the play that follows. Link to video: https://youtu.be/M0kkKiGVNzk.
Figure 2: Simulated tennis rally between 2 players using 3 shots of training data as input. Frames a) - c): Training data shots.
Frames d) - f) Simulated rollout. Red and blue markings indicate player movement. The lines indicate shot trajectories. The
current shot is opaque while earlier shots are more transparent. The purple line is the first simulated shot. Link to video:
https://youtu.be/A1_vv12V5q0.
vious work has been successful in generating realis-
tic, sustained, and customizable simulations, learned
from player and ball tracking data, for more than a
few seconds. In this work we present Sports Neu-
ral Generator or SportsNGEN that realizes the goals
of realistic, sustained, customizable and measurable
sports gameplay. Figure 1 and Figure 2 depict foot-
ball
1
and tennis sequences, respectively, generated by
our approach along with links to simulation videos.
Our contributions: (i) A transformer decoder
based simulation engine, SportsNGEN, trained on
player and ball tracking data as well as match meta-
data, capable of simulating the movement of all play-
ers and the ball simultaneously in a sports game sce-
nario. The simulations are sustained between breaks
in play. (ii) Training and evaluating SportsNGEN on
a large database of professional tennis tracking data.
SportsNGEN is capable of simulating an entire ten-
nis match by combining the generated simulations
with a shot classifier and logic to start and end ral-
lies. (iii) We show that our model can be used to
inform tennis coaching decisions and best shot op-
tions by evaluating counterfactual or what if options.
1
We use the term football to refer European football or
soccer.
(iv) We demonstrate through ablations that the follow-
ing enhancements significantly improve convergence
and generated simulations: a) extending the player
and ball representations to include relative velocity,
distance to the ball, and time into the game or se-
quence; b) adding small perturbations to the ball po-
sitions during training to allow the model to correct
for errors; and c) Adding context tokens to allow the
model to adapt to different playing surfaces. (v) We
devise a novel optimization method by defining met-
rics to statistically evaluate the quality of generated
tennis data. By altering simulation hyperparameters,
we show that the simulations can be optimized to
be statistically similar to the behaviour of real play-
ers. (vi) We demonstrate that a generic version of our
model can be customized to a specific tennis player
by fine-tuning on match data that includes that player.
2 RELATED WORK
In this section, we discuss related work in the cate-
gories of sports analytics, and game simulation, and
trajectory prediction.
icSPORTS 2024 - 12th International Conference on Sport Sciences Research and Technology Support
120

Group Activity Recognition and Sports Analyt-
ics. Miller et al. (2014) develop an approach to rep-
resent and analyze the underlying spatial structure
that governs shot selection among professional bas-
ketball players. Le et al. (2017a) employ an imitation
learning approach to analyze football defensive strate-
gies. Hauri and Vucetic (2022) propose a transformer-
based architecture with a Long Short-Term Memory
(LSTM) embedding to recognize basketball group ac-
tivities from player and ball tracking data. Teranishi
et al. (2022) evaluate football players who create off-
ball scoring opportunities by comparing actual move-
ments with the reference movements generated via
trajectory prediction. Chen et al. (2023) use a proba-
bilistic diffusion approach to model basketball player
behavior. The model only considers player movement
and no other metadata. Wang et al. (2023) present
a football tactics assistant that focuses on analyzing
corner kicks which allows coaches to explore player
setup options and use those with the highest likeli-
hood of success.
Game Simulation. Kurach et al. (2020) introduce a
game engine that simulates football gameplay with an
environment for evaluating RL algorithms. Liu et al.
(2021) demonstrate an RL approach, where the agents
progressively learn to play football initially from ran-
dom behavior, to simple ball chasing, to showing ev-
idence of cooperation. Braga and Barros (2022) in-
troduce a simulator for robot football optimized for
performing RL experiments. Yu et al. (2023) intro-
duce a RL environment where agents are trained to
play basketball.
Finally, Yuan et al. (2023) describe a method to
learn simulated tennis skills from broadcast videos.
However, this approach only models one shot cycle at
a time, using statistical analysis to predict the desired
shot location for specific players. There is no cou-
pling between the current shot and previous shots, so
strategic play is limited. Also, the players are only al-
lowed to move on the baseline, so no volleys or inner
court play is permitted, restricting realism.
Our approach is not RL based. It instead learns in
a discriminative fashion from sequences of gameplay
tracking data, which obviates the need to use physics
based models of gameplay or learning gameplay from
scratch with RL. This also enables us to build pre-
dictive models for specific players which can be im-
portant for analysis and gaming scenarios. Overall,
our work is distinct from the above works in that our
goal is to generate sports gameplay that captures the
complete distribution of player behaviour, where the
aggregation of non-deterministic simulations is statis-
tically similar to real data. This acts as a powerful tool
for strategic analysis, evaluating how player decision
making affects the outcome of a period of play.
Sports Trajectory Prediction. There is a rich lit-
erature on trajectory prediction in general, and sports
trajectory prediction in particular. Yue et al. (2014)
learn predictive models for basketball play prediction
given the current game state. Zheng et al. (2016)
model spatiotemporal trajectories over long time hori-
zons using expert demonstrations capable of gener-
ating realistic, but short rollouts. Le et al. (2017b)
present an LSTM based imitation learning approach
for learning multiple policies for team defense in pro-
fessional football. However, no policy is learned
for the position of the ball. Zhan et al. (2019) de-
scribe a hierarchical framework for sequential gener-
ative modeling that can generate high quality trajec-
tories and encode coordination between agents. How-
ever, their framework cannot generate entire games.
Li et al. (2021) describes an approach for multi-agent
trajectory prediction using a graph neural network.
When evaluated on basketball data, only short trajec-
tories were considered. Tang et al. (2021) propose the
concept of collaborative uncertainty, to model the un-
certainty in interaction in multi-agent trajectory fore-
casting. Wu et al. (2021) propose a generative ad-
versarial network (GAN) to generate short basket-
ball player and ball trajectories. Alcorn and Nguyen
(2021) introduce baller2vec, a multi-entity trans-
former that can model coordinated agents. It em-
ploys a special self-attention mask to learn the dis-
tributions of statistically dependent agent trajectories
and is shown to generate realistic trajectories for bas-
ketball players or the ball itself for short durations.
Our work builds upon baller2vec to enable sus-
tained gameplay simulations by simultaneously sim-
ulating both the player and the ball. Omidshafiei et al.
(2022) study the problem of multiagent time-series
imputation in the context of football in order to pre-
dict the behaviors of off-screen players.
3 METHODOLOGY
In this section we provide a complete description of
our approach to generating sports simulations. A flow
diagram of SportsNGEN is shown in Figure 3.
3.1 Input Data
We index the N players and the ball in a match with
n ∈ {1, . . . , N, ball}. We then define an object token
O
τ,n
at index τ to represent the state of nth player or
SportsNGEN: Sustained Generation of Realistic Multi-Player Sports Gameplay
121

Initialize starting
tokens 𝐶 and 𝑂
Compute next
token using 𝑓
Classify events
using 𝑔
End-of-play
conditions met?
Update Match State
True
False
Increment
token
“Winner – Cross court”
2 Games 3
1 Sets 1
Figure 3: Left: SportsNGEN flow diagram. Right: Cartoons
from a simulated tennis match corresponding to the flow
chart steps.
Context Tokens Object Tokens
Token Sequence of Length for =3 Context Tokens, =2 Players, and a Ball
Object Token for Player or Ball
Position
,
Identity
Distance to Ball
Velocity
Elapsed Time
Figure 4: Top: Layout of an object token O
τ,n
. Bottom:
Sequence of T tokens for M=3 context tokens, N=2 players,
and a ball.
ball as:
O
τ,n
= {I
n
, (p
x,τ,n
, p
y,τ,n
, p
z,τ,n
), (v
x,τ,n
, v
y,τ,n
, v
z,τ,n
),
(d
x,τ,n
, d
y,τ,n
, d
z,τ,n
), e}
where p denotes position, v velocity, d distance to the
ball, I ∈ R
ι
a learned identity for a player that can
capture their style of play, e ∈ R elapsed time into
the game or sequence depending on the sport, and
x, y, z ∈ R
3
are components in a 3D coordinate sys-
tem. The position data are typically supplied as the
center of mass (COM) of the ball or player from a
sports tracking system. For all players, position is 2D
only i.e. p
z,τ,n
= v
z,τ,n
= 0 and for the ball, distance d
is set to 0. The e component of the feature vector is
useful to model long-term dependencies due to player
fatigue and team strategy or for ensuring simulated
tennis rallies are realistic in length. We normalize the
p, v, and d components of O by appropriate values for
each sport.
As a crucial step in generating sustained simula-
tions, we add a small amount of uniform noise to the
position p and velocity v of the ball. We find that
training on noise-free ball trajectories does not lead
to stable simulations as any errors in the prediction
lead to out-of-distribution inputs at the next time step,
which the model cannot correct.
In addition to the object tokens, we also define
a set of context tokens {C
1
, . . . , C
M
} specific to each
sport that contain information that would influence
gameplay such as the score, the identity of the oppos-
ing team, the location of the game, and the weather.
We convert each piece of contextual information into
feature vectors, either through learned encodings for
discrete information such as the stadium, or training a
network to convert a representation of the score into a
feature vector. Figure 4 depicts the components of a
token and the order of tokens in a training sequence.
Cropping Sequences. We crop the input training
sequences to eliminate data outside of actual game-
play. The data removed includes players getting into
position for the next play or switching sides which are
not essential for simulation. To train the model effi-
ciently using batches, we define a maximum sequence
length of tokens T and cut any sequences longer than
this into multiple sequences. Shorter sequences are
padded to make up the remainder of the maximum
length. The sequence length T depends on the sam-
ple rate of the data, and the length of previous data
relevant to predicting the next time step. Tracking
data can be sampled up to 50 Hz. Although this pro-
vides extremely fine detail, for team sports like foot-
ball with 23 objects on the pitch, a period of 5 seconds
at 50 Hz would produce a sequence length of 5750
tokens, making the model impractical to train. Since
many of the dynamics in matches are longer than 5
seconds, we make a compromise between sample rate
and computational cost.
3.2 Transformer Decoder Model
We use a transformer decoder model f that is an ex-
tended implementation of baller2vec (Alcorn and
Nguyen, 2021) to predict future player and ball states
given the current and recent history of states. We
make a significant update to the baller2vec exper-
iments by modelling both the ball and the players si-
multaneously.
The model f is run in an auto-regressive mode
with a rolling window of length T , using a specified
period of previous predictions to predict the ball and
player state at the next step. We use the same atten-
tion method as baller2vec, permitting each object
token to attend to every object token up to and includ-
ing its own time step. We adjust the attention mask
so that each object token can attend to the context to-
kens, influencing the predictions for player and ball
icSPORTS 2024 - 12th International Conference on Sport Sciences Research and Technology Support
122

movement.
We treat the update step as a classification as op-
posed to a regression or diffusion problem, by split-
ting the area of possible next locations for the ball and
players into a 3D and 2D grid, respectively, of discrete
bins that indicate the relative offset ρ from the current
position p as this is easier to learn and can bound mo-
tion to physically possible values. A depiction of a
grid for a football player and the ball is shown in Fig-
ure 5.
Figure 5: Visualization of the 2D and 3D classification grids
used to predict the position of a player and the ball at the
next time step.
We use nucleus sampling (Holtzman et al., 2020)
to sample the location in the output grid based on the
output probabilities of f . When the grid location has
been selected, we turn the discrete value into a contin-
uous value by sampling from a uniform distribution
across the bin. If the initial conditions for the player
or ball have zero velocity, this helps to force the sim-
ulation into motion by avoiding continuous velocity
predictions of zero.
To enable the model to learn the behavior of in-
dividual players, the bin size must be fine grained
enough for predictions to capture distinguishing fea-
tures. In many sports, important statistics include how
fast a player can run, or how far they can hit, throw or
kick the ball. Formally, the probability distribution of
predicting a particular bin location k for an object n at
step τ + 1 is
p(ρ
τ+1,n
= k|O
1:τ,n
) = f (O
1:τ,n
, k).
The value of ρ is then sampled from the distribution:
ρ
τ+1,n
∼ p(ρ
τ+1,n
= k|O
1:τ,n
).
Based on the sampled value of ρ and the mapping
between bins and physical distance, the updated val-
ues of position p
τ+1,n
, velocity v
τ+1,n
, and distance
to the ball d
τ+1,n
can be computed. Since we use
the baller2vec attention mask, the positions of the
ball and each player can be updated simultaneously at
each time step.
We detect the end of a simulation or break in a
play with logic specific to each sport. For example,
we can end simulations if a ball goes out of bounds
or in some sports if the ball makes contact with the
ground, or if the time in the period of play runs out.
When generating simulations, we set a maximum in-
put sequence length of T tokens. For a player and
ball state update at step τ + 1, we input from τ − T to
τ steps of initial token data into the model f . If T time
steps of data are not yet simulated, the missing tokens
are padded with zeros and masked. Specifically, sim-
ulations are rolled autoregressively out at the ith step
as
ρ
i
∼ p(ρ
i
= k|O
i−1
, O
i−2
. . . O
i−T
).
3.3 Event Classification
We also train an event classifier g which is run after
a break in gameplay. Examples of events would be
passes, runs, fouls, goals, the type of shot played, and
so on. The event classifier g has the same input and
architecture as f , but does not use attention masking,
and uses separate prediction heads for each different
type of event. The event classifier can be used for
defining the initial conditions for the next play and
gathering statistics about the period of play.
4 TENNIS IMPLEMENTATION
DETAILS
In this section, we detail the implementation of Sport-
sNGEN for tennis. Initial rally conditions, boundary
logic and relevant player statistics are well defined, so
we can demonstrate the capabilities of the system.
We use a proprietary dataset of tennis tracking
data for approximately 15,000 tennis matches con-
taining 7.6 million rally sequences. The data contain
COM locations for each player and the ball sampled
at 25 Hz, with the center of the court at (x, y, z) =
(0, 0, 0), whose components refer to the length, width,
and vertical directions, respectively.
The data also contains metadata about each match
and rally, including: the players in the rally, the tour-
nament and court, the rally winner, whether the rally
was a first or second serve, and what shots were
played. The tracking data set is cut up into individual
sequences that start at the toss before a serve and end
shortly after the rally is finished. We set a maximum
sequence length of input data to be 6 seconds. We
found that increasing the sequence length to be more
than 6 seconds became computational impractical and
did not improve the model accuracy. This suggests
that professional tennis players’ decision making is
not strongly affected by information further than 6
seconds into the past. We also double the size of the
SportsNGEN: Sustained Generation of Realistic Multi-Player Sports Gameplay
123

data set by flipping the data along the x and y axes
simultaneously.
We allow for ±25 mm of uniform position and
per unit time velocity noise in the x dimension and
±12.5 mm of noise in the y and z dimensions. If the
added noise is any smaller than this, the simulations
start to break down. For output classification, we use
61 bins for each dimension, scaled for the ball such
that the maximum velocity is fractionally faster than
the current fastest serve speed. This results in 61 ×
61 = 3721 and 61 × 61 × 61 = 226981 possible bin
locations for the player and ball output, respectively.
At 25 Hz, this equates to a ball bin size of {x, y, z} =
{46, 13, 10} mm.
The playing surface is important contextual infor-
mation when predicting rallies in tennis. The expec-
tation is that hard and grass courts have the fastest
bounces, and clay courts absorb more momentum
from the impact resulting in slightly slower bounces
and longer rallies. We learn context vectors for each
surface and tournament in the dataset, and also en-
courage the model to learn the difference between first
and second serve types by including context vectors
for both.
We generate initial conditions based on historical
examples from the data when particular players are
serving first or second serves from specific sides. We
take the initial condition as the start of the toss move-
ment during the serve. This initial condition includes
the positions and velocities in all dimensions for both
players and the ball. We can detect the end of the rally
through simple logic on the movement of the ball. If
the ball continues past a player, is close to stationary
near the net, bounces out of bounds or bounces twice
on one side of the net, then we can deem the rally to
have finished. At this point, we stop the simulation
and collect the rally data using the event classifier.
To understand who won the rally, and for analysis
of the point, we train the event classifier to classify
the type of shot being played at every step within the
simulation. This includes the type of stroke (ground-
stroke, serve, volley, etc.), the direction of the shot
(cross court, down the line, etc.), whether the shot is
a winner, error, or a continuation of the point, and if
an error is forced or unforced.
The event classifier g receives as input a simpli-
fied version of the input token, without any identity
I or context C components. In the training data, shot
type labels are consistent across time steps between
shots. The model is expected to predict the same,
only varying its prediction when the ball contacts a
racket. When a rally is finished, we convert the track-
ing data from the rally into the shot type classifier in-
put, run the model once to identify where the changes
in shot type are, and take the model shot type between
changes as the final label for each shot. The winner or
error classification for the final shot of the rally tells
us who won the point, and the shot type labels help us
break down the shots for statistical analysis. To com-
bine rallies together to simulate an entire match, all
that is left to do is implement logic to increment the
score, calculate who is serving, from which end and
which side. These can be used to obtain the initial
conditions for the next point.
Tennis Network Architecture. The input tokens
O
τ,n
are embedded with a 3 layer MLP with input size
30, hidden sizes 256 and 512, and output size 2048.
The transformer decoder, f , has 4 layers, 2048 em-
bedding dimension, 8 heads, 4 expansion factor, and
0.2 dropout. The shared player output network is a
single linear layer with input size 2048 output size
equal to 61 × 61 bins. The ball output network is
a single linear layer with input size 2048 and output
size equal to 61 × 61 × 61 bins.
5 EXPERIMENTS
For the tennis experiments, we selected 3 male profes-
sional players with varying styles to evaluate Sport-
sNGEN and simulated 6 matches between each com-
bination of two players. Each match was the best
of 3 sets. We repeat this experiment across 3 dif-
ferent tournaments, one for each surface type: hard,
clay and grass. For comparison, we then collect data
where these players have played each other on these
surfaces. Using both real and simulated data, we com-
pute relevant statistics and define an evaluation metric
for each statistic as the difference between the two.
For physical metrics, we compare the median,
inter-quartile range (IQR), and Wasserstein distance
between the distributions of real and simulated data
for the following quantities collected across all
matches:
• Toss contact height: Height of the ball at the con-
tact point with the racket during serving.
• First and second serve speeds: Maximum
recorded speed during the serve.
• Return speeds: Maximum speed of a return of
serve.
• Groundstroke speeds: Maximum speed of all
groundstrokes.
We also compute additional relevant statistics based
on aggregated data. For these quantities, a scalar
value is aggregated over many rallies for each player.
icSPORTS 2024 - 12th International Conference on Sport Sciences Research and Technology Support
124

The absolute difference between the real and simu-
lated aggregated scalars is compared.
• First serve %: Percentage of first serves that are
in bounds.
• Double fault %: Percentage of second serves that
are out of bounds.
• First and second serve win %: Percentage of ral-
lies won when serving on first and second serve,
respectively.
• Ace %: Percentage of first serves that are aces.
• Serve points won %: Percentage of rallies won
as server.
Figure 6: Bin probabilities for the ball projected into the
xy plane during a) mid-flight and b) - d) at time of impact
(ToI) for 3 values of top-p. The center of each diagram, bin
(x, y) = (30, 30), corresponds to no movement. Yellow in-
dicates a probability of 0 while progressively darker colors
indicate higher probabilities.
Varying the Top-p Sampling Parameter. Figure 6
shows typical output probability distributions, pro-
jected into the xy plane, for an update step of the ball
in mid-flight, and at the moment the ball is about to
be hit. The peaks in intensity for the mid-flight pre-
dictions (a) are distributed over very few bins since
the model has learned the physical constraints of the
system (e.g. drag, gravity), and can therefore be very
confident in how to update the ball state. The remain-
ing panels (b)-(d) depict the probability distributions
for the ball at the time of impact (ToI) – the point
at which a player hits the ball for various values of
top-p. The distributions in these cases contain multi-
ple separated peaks in intensity in the xy plane. This
corresponds to different decisions a player may make
when choosing to play the shot either down the line or
across the court. By sampling from these two modes,
we are able to perform counterfactual analysis (see
Section 5). As top-p decreases, the probability of
sampling a cross court shot decreases, demonstrating
the need to optimize top-p in order to accurately cap-
ture the player behaviour in the simulations. In gen-
eral, we will see that a low top-p value will result in
less variety in playing style, but a high top-p value
will result in many outliers.
We see the similar patterns in Figure 7a), the cu-
mulative probability for the player and ball at ToI for a
return and during mid-flight for a shot as a percentage
of number of contributing bins. For mid-flight predic-
tions of the ball, the probability distribution is con-
centrated over few bins, with 90% of the distribution
contained within 0.002% of the total bins. When pre-
dicting changes in direction (e.g. at ToI), the probabil-
ity distribution is spread over more bins, up to 0.5%
of the bins are required to populate 90% of the cumu-
lative probability.
Figure 7b) and (c) show how the various metrics
vary with top-p. In (b), the number of non-realistic
rallies (rallies that must be discarded based on logi-
cal checks) increases with a value of top-p both that
is too high, and too low. Increasing top-p increases
the probability that the ball trajectory may be updated
in a way that defies physical constraints and would
be forced to be removed. With too low top-p there
may be too few options for the ball and player to up-
date in a way that leads to a realistic rally. In (c), we
see that with the exception of double fault percentage,
the metrics reach optimal values when top-p is in the
range of 0.8 to 0.9.
Object Token Component Ablation Study. In
Figure 8, we quantify how the additional components
in the token vector O affect the convergence and fi-
nal accuracy of the physical metrics when compared
to a baseline model that does not use velocity v, dis-
tance to the ball d, elapsed time e, or context tokens C
(similar to that used in baller2vec). The plots show
that SportsNGEN converges faster and reaches better
results than the baseline model when averaged across
all physical metrics. We also see faster convergence
to ∼20% non-realistic rallies.
Varying the size ι of the player encoding vector I
in Figure 9, we find that the accuracy increases until
ι =20 where there are diminishing returns for further
increases. This is also supported by Figure 10 d)-f),
where the data with no player ID I has a much broader
distribution of serve speeds, and a nearly identical
median serve speed for all three players.
Context Token Study. We add context tokens to
encode the tournament, court surface type, and
SportsNGEN: Sustained Generation of Realistic Multi-Player Sports Gameplay
125

Figure 7: A) Cumulative probability for the player and ball at ToI for a return and during mid-flight for a shot as a percentage
of number of contributing bins. b) Proportion of non-realistic rallies that are discarded during match simulation. c) Absolute
difference between aggregated statistics in the training data and the simulations as a function of top-p.
Figure 8: A comparison of convergence for SportsNGEN against a Baseline model without v, d, e and context tokens C, for
a) An average of the 4 physical metrics, and b) Non-realistic rallies as a function of training iterations.
Figure 9: Varying the player ID I size ι to show how various
metrics can be improved with a larger ι. As a control, we
train a generic model without player ID I.
whether the serve is the player’s first or second. Typ-
ically the second serve is expected to be slower since
players will prioritize accuracy over speed to avoid
losing a point through double fault. Figure 10 shows
that the addition of a serve context token C
serve
as well
as the player ID component I in O reduce the dif-
ference between real and simulated serve speeds and
produce narrower distributions between first and sec-
ond serve speeds.
Figure 10: The distribution of first and second serve speeds
for all three players for the following models: (top) Sport-
sNGEN, (middle) a model with no player ID vector I, (bot-
tom) a model with no serve context token C
serve
.
To quantify the effect of the playing surface, we
use the coefficient of restitution by taking the ratio of
icSPORTS 2024 - 12th International Conference on Sport Sciences Research and Technology Support
126

Figure 11: Ratio of speed after to before the ball bounce.
Each row contains results for a different court surface type.
The columns are real (left), and simulated (right) data. The
last row is surface type agnostic, containing a weighted av-
erage of the data for each court.
the speed after to before the bounce. A value less than
1 means the ball has lost momentum and indicates a
slower surface. Figure 11 shows this metric for three
court types and for the surface agnostic case, for both
real and simulated data. The median value for each
court type follows the expected trend: typically clay
courts have the slowest bounces, and hard courts have
the fastest, which is better represented when we intro-
duce the surface token into the model.
We also demonstrate that SportsNGEN is realistic
throughout the rally with Figure 12 showing the dis-
tribution of rally lengths for real data, and simulations
from SportsNGEN. Although we see a slightly higher
peak in rally lengths in (b), we see both distributions
with a peak at a small number of shots per rally, and
tailing off towards 15 shots.
Figure 12: Length of rallies in number of shots for a) the
original training data for the given three players on hard
surfaces, b) simulated data using SportsNGEN.
Transfer Learning. As an extension to training a
model capable of capturing the behavior of all play-
ers, we also train a generic model f
gen
which learns
a single feature vector I
gen
, called the generic player
vector where I
n
= I
gen
, n ∈ N. We then fine-tune f
gen
with matches containing a specific player, and transfer
learn a new set of I
n
∈ N for the player that can rep-
resent their behavior against a generic opponent. This
could be used for quickly customizing a pretrained
model to a new player on the circuit.
Figure 13 shows various metrics as a function of
the number of training sequences that are required to
fine-tune f
gen
such that the generic player ID vector I
is adapted to a new player. In the simulations, f
gen
is
the opponent for the fine-tuned model. The ground-
stroke and return metrics improve as the number of
training samples increases whereas the serve metrics
fluctuate with the first serve speed getting worse. This
can be explained by the low variability of the serve
distribution being easier to learn when compared to
highly variable groundstroke patterns.
Figure 13: Learning features of a specific player by fine-
tuning a generic model, showing a) the Wasserstein distance
for physical data, and b) difference to training data for sta-
tistical metrics.
6 APPLICATIONS
In this section we explore SportsNGEN applications.
Predicting Rally Outcomes. A key intended ap-
plication of SportsNGEN is generating insights for
coaching and sports broadcasts. To prove it’s valid-
ity for these applications, the model should accurately
forecast the probability that each player wins a rally
as it develops.
We can test SportsNGEN’s ability to do this in the
following way. We sample random rallies from the
training data, and roll out the model from a given ran-
dom time step 100 times, to generate a win percentage
for both players. Repeating this for a large number of
starting points, we form a histogram of predictions by
stratifying the predictions into bins.
SportsNGEN: Sustained Generation of Realistic Multi-Player Sports Gameplay
127

Figure 14 shows the histogram of events contribut-
ing to the win percentage calibration plot. For each
event, 100 simulated rollouts are used to generate the
win percentage. The mean win percentage generated
by the model is close to 50% which is to be expected
for tennis rallies. In addition there are situations in
which the winner is very likely already determined
(if the random time chosen is close to the end of the
rally, for example). As a result, the bins close to 0
and 100% are also more populated which explains the
higher error in the more sparsely populated bins close
to 20% and 80%.
For each prediction, we also have the ground truth
of who won the rally in the training data. Taking the
90% bin for example, if the model is well-calibrated,
the corresponding ground truth rallies should be won
by the player in 90% of cases. Figure 15 shows that
the win percentages generated by the SportsNGEN
are well-calibrated, with deviations where data are
sparse.
Figure 14: Histogram of win percentages output by the
model when simulating rollouts in a random rally at a ran-
dom point.
Figure 15: Predicted win percentages vs. observed win per-
centages for SportsNGEN. The solid line shows ideal cal-
ibration. The win percentages output by SportsNGEN are
well calibrated.
Counterfactuals. Figure 16 demonstrates one way
the SportsNGEN can be used to inform coaching de-
cisions. A point indicated by the red dot in a real rally
is chosen as a branch point in time, just as a player
is about to play a shot. In the real rally, the shot af-
ter the branch point goes straight down the middle –
indicated by the purple line in (a).
We can force alternative shot selection by sam-
pling from the cross court mode in Figure 6 and
analysing how the rally would have played out. In (b)
and (c), two alternatives are depicted. We quantify the
strength of each shot selection by running 100 simula-
tions until the end of the rally, sampling equally from
both modes at this branch point. We then aggregate
statistics to calculate a win percentage for each shot
choice.
Playing a shot to either of the two corners gave the
player roughly equal probability of winning at 58%,
whereas the original choice of hitting to the middle
reduced the probability below 50%. Pushing the op-
ponent farther to the edge of the court may explain
this advantage. Figure 6 shows that the probability
of the cross court mode is lower, highlighting that the
player would more often opt for the safer shot down
the middle.
Figure 17 shows the results of many simulations
forcing a certain type of shot for the shot shown in
purple. It shows that even if there are constraints im-
posed on the type of shot, there can still be variability
in play. Running this simulation for many shots and
aggregating win percentages can give insight into the
kinds of tactics that would be advantageous, and since
the player and court can be specified and trained on
real data, it could be specifically useful for improving
the play style of a player in a particular situation.
Football. Though we focused this work on tennis,
we have had success using SportsNGEN to simu-
late football matches with a high degree of realism
using the same model architecture. Click on https:
//youtu.be/M0kkKiGVNzk for a video demonstration
of sustained passing sequences. The player and ball
positions are derived from COM data.
7 LIMITATIONS
An important limitation of SportsNGEN is that it is
not designed to handle out of distribution situations.
Unconventional initial conditions can produce unreli-
able results. This extends to unseen players in which
the model will default to a “generic” player represen-
tation. This method is also computationally intensive,
requiring 2 days to train on an NVIDIA A100 GPU.
While we believe our method is applicable to many
sports, we have only trained models for football and
tennis. Other sports may introduce difficulties.
icSPORTS 2024 - 12th International Conference on Sport Sciences Research and Technology Support
128

Figure 16: A real rally, and two simulated rallies for a different shot type, where the color transparency indicates time into the
rally (with opaque being the end). The ball trajectory is orange, with the shot at which the simulations start shown in purple.
The point at which the two simulations are branched is denoted by a red dot. The players are shown as blue and red traces.
Figure 17: A real rally a), and many simulated rallies for two different shot types b), c). In the real rally, the increasing color
opacity indicates time into the rally. The ball trajectory is orange, with the shot at which the simulations start shown in purple,
the point at which this is branched is denoted by a red dot. The players are shown as blue and red traces. In the simulations,
only the shots after the decision are shown to highlight the possibilities arising from the simulation engine.
8 DISCUSSION
In this work, we detailed SportsNGEN that is capable
of generating realistic sports gameplay when trained
on player and ball tracking sequences. A unique as-
pect of the system is the ability to customize game-
play in the style of a particular player via fine-tuning.
Also, it is straightforward to use SportsNGEN to in-
form coaching decisions and game strategy through
counterfactuals. In the future, we plan to adapt Sport-
sNGEN to sports beyond tennis and football.
ACKNOWLEDGEMENTS
The authors would like to thank Beyond Sports B.V.
for the visualisations and Sports Interactive for syn-
thetic football data. We also thank Anirban Mishra,
Tristan Fabes, and Pavlo Sharhan for their helpful
contributions.
REFERENCES
Alcorn, M. A. and Nguyen, A. (2021). baller2vec: A
multi-entity transformer for multi-agent spatiotempo-
ral modeling. arXiv preprint arXiv:2102.03291.
Braga, P. H. and Barros, E. S. (2022). rsoccer: A framework
for studying reinforcement learning in small and very
small size robot soccer. RoboCup 2021: Robot World
Cup XXIV, 13132:165.
Chen, X., Wang, W.-Y., Hu, Z., Chou, C., Hoang, L.,
Jin, K., Liu, M., Brantingham, P. J., and Wang, W.
(2023). Professional basketball player behavior syn-
thesis via planning with diffusion. arXiv preprint
arXiv:2306.04090.
Hauri, S. and Vucetic, S. (2022). Group activity recognition
in basketball tracking data–neural embeddings in team
sports (nets). arXiv preprint arXiv:2209.00451.
Holtzman, A., Buys, J., Du, L., Forbes, M., and Choi, Y.
(2020). The curious case of neural text degeneration.
In International Conference on Learning Representa-
tions.
Kurach, K., Raichuk, A., Sta
´
nczyk, P., Zaj ˛ac, M., Bachem,
O., Espeholt, L., Riquelme, C., Vincent, D., Michal-
ski, M., Bousquet, O., et al. (2020). Google re-
search football: A novel reinforcement learning en-
vironment. In Proceedings of the AAAI conference on
artificial intelligence, volume 34, pages 4501–4510.
Le, H. M., Carr, P., Yue, Y., and Lucey, P. (2017a). Data-
driven ghosting using deep imitation learning.
Le, H. M., Yue, Y., Carr, P., and Lucey, P. (2017b). Coordi-
nated multi-agent imitation learning. In International
Conference on Machine Learning, pages 1995–2003.
PMLR.
Li, L., Yao, J., Wenliang, L., He, T., Xiao, T., Yan, J., Wipf,
D., and Zhang, Z. (2021). Grin: Generative relation
and intention network for multi-agent trajectory pre-
diction. Advances in Neural Information Processing
Systems, 34:27107–27118.
Liu, S., Lever, G., Wang, Z., Merel, J., Eslami, S., Hennes,
SportsNGEN: Sustained Generation of Realistic Multi-Player Sports Gameplay
129
D., Czarnecki, W. M., Tassa, Y., Omidshafiei, S., Ab-
dolmaleki, A., et al. (2021). From motor control
to team play in simulated humanoid football. arXiv
preprint arXiv:2105.12196.
Miller, A., Bornn, L., Adams, R., and Goldsberry, K.
(2014). Factorized point process intensities: A spa-
tial analysis of professional basketball. In Xing, E. P.
and Jebara, T., editors, Proceedings of the 31st Inter-
national Conference on Machine Learning, volume 32
of Proceedings of Machine Learning Research, pages
235–243, Bejing, China. PMLR.
Omidshafiei, S., Hennes, D., Garnelo, M., Wang, Z., Re-
casens, A., Tarassov, E., Yang, Y., Elie, R., Con-
nor, J. T., Muller, P., et al. (2022). Multiagent off-
screen behavior prediction in football. Scientific re-
ports, 12(1):8638.
Tang, B., Zhong, Y., Neumann, U., Wang, G., Chen, S., and
Zhang, Y. (2021). Collaborative uncertainty in multi-
agent trajectory forecasting. Advances in Neural In-
formation Processing Systems, 34:6328–6340.
Teranishi, M., Tsutsui, K., Takeda, K., and Fujii, K. (2022).
Evaluation of creating scoring opportunities for team-
mates in soccer via trajectory prediction. In Interna-
tional Workshop on Machine Learning and Data Min-
ing for Sports Analytics, pages 53–73. Springer.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, Ł., and Polosukhin, I.
(2017). Attention is all you need. Advances in neural
information processing systems, 30.
Wang, Z., Veli
ˇ
ckovi
´
c, P., Hennes, D., Tomašev, N.,
Prince, L., Kaisers, M., Bachrach, Y., Elie, R., Wen-
liang, L. K., Piccinini, F., et al. (2023). Tacticai:
an ai assistant for football tactics. arXiv preprint
arXiv:2310.10553.
Wu, G., Zhao, S., Lin, J., and Silva, C. (2021). Basketball
gan: Sportingly acceptable trajectory prediction.
Yu, C., Yang, X., Gao, J., Chen, J., Li, Y., Liu, J., Xi-
ang, Y., Huang, R., Yang, H., Wu, Y., and Wang,
Y. (2023). Asynchronous multi-agent reinforcement
learning for efficient real-time multi-robot coopera-
tive exploration. In Proceedings of the 2023 Interna-
tional Conference on Autonomous Agents and Multia-
gent Systems, AAMAS ’23, page 1107–1115, Rich-
land, SC. International Foundation for Autonomous
Agents and Multiagent Systems.
Yuan, Y., Makoviychuk, V., Guo, Y., Fidler, S., Peng, X.,
and Fatahalian, K. (2023). Learning physically simu-
lated tennis skills from broadcast videos. ACM Trans.
Graph, 42(4).
Yue, Y., Lucey, P., Carr, P., Bialkowski, A., and Matthews,
I. (2014). Learning fine-grained spatial models for
dynamic sports play prediction. In 2014 IEEE inter-
national conference on data mining, pages 670–679.
IEEE.
Zhan, E., Zheng, S., Yue, Y., Sha, L., and Lucey, P. (2019).
Generating multi-agent trajectories using program-
matic weak supervision. In International Conference
on Learning Representations.
Zhao, Z., Chai, W., Hao, S., Hu, W., Wang, G., Cao, S.,
Song, M., Hwang, J.-N., and Wang, G. (2023). A
survey of deep learning in sports applications: Per-
ception, comprehension, and decision. arXiv preprint
arXiv:2307.03353.
Zheng, S., Yue, Y., and Hobbs, J. (2016). Generating long-
term trajectories using deep hierarchical networks.
Advances in Neural Information Processing Systems,
29.
APPENDIX
Prediction Error Versus Time. Figure 18 shows the
results from 200 simulations initialized from a ran-
dom point in a random rally. The simulations are
evolved for 1.75 seconds and the RMSE is plotted
compared with the ground truth data for the ball and
players. The baseline is taken as a linear extrapolation
of the velocity of the player and ball frozen at the time
the simulation begins. Our simulation performs better
than a linear extrapolation over a short time, indicat-
ing it has learned how to sensibly predict and update
the state vectors as a function of time.
Figure 18: Root Mean Squared Error (RMSE) compared
to real tennis data as a function of time, for both ball and
player positions when simulating forward from a random
in a rally. SportsNGEN performs better than a baseline of
linear extrapolation.
icSPORTS 2024 - 12th International Conference on Sport Sciences Research and Technology Support
130
