
CRANEBot: Teleoperated Crane-Suspended Robotic System
for Inspection and Manipulation in Harsh Environments
Giancarlo D’Ago
1,2 a
, Sergio Di Giovannantonio
1 b
, Luca Rosario Buonocore
1 c
and Mario Di Castro
1 d
1
European Organization for Nuclear Research, CERN, 1211 Geneva, Switzerland
2
PRISMA Lab, Department of Electrical Engineering and Information Technology,
University of Naples Federico II, Via Claudio 21, 80125 Naples, Italy
Keywords:
Robotics in Hazardous Fields, Engineering for Robotic Systems, Telerobotics and Teleoperation.
Abstract:
The need to perform operations from above has become one of the primary challenges that robotics must
address in recent times. At CERN, high-intensity hadron colliders and fixed target experiments increasingly
require robotic telemanipulation to prevent human personnel from being exposed to radioactive environments.
In this article, we propose a modular robotic system called CRANEBot, which is transported by cranes. This
system enables operations from above, allowing for extended sessions of inspection, manipulation, and remote
handling at variable heights with minimal impact on the external environment. The system operates using a
robotic framework that enables communication with its hardware components and is controlled by a teleop-
erator through a graphical interface. The proposed functionalities have been tested and validated in multiple
robotic interventions.
1 INTRODUCTION
The development and deployment of robotic technol-
ogy in hostile environments has received consider-
able attention in recent years. Key applications in-
clude space exploration, nuclear inspection and de-
commissioning, offshore energy maintenance, under-
water inspection and deep mining (Bellingham and
Rajan, 2007), (Trevelyan et al., 2016). In all these
application areas, the robot is the ideal candidate to
replace skilled personnel, both to eliminate the risk
related to human health and to increase productivity.
At the European Organization for Nuclear Research
(CERN), the world’s largest high-energy physics lab-
oratory, robotics fits exactly into this context. At
CERN there are more than 70 km of underground tun-
nels and multiple fixed target experiments, with thou-
sands of items that need to be inspected, monitored
and maintained. The radiation from particle collisions
and the high magnetic field are major risk factors for
human operators. The use of robots in CERN’s semi-
a
https://orcid.org/0000-0002-4695-7719
b
https://orcid.org/0009-0008-1871-9458
c
https://orcid.org/0000-0001-5396-2519
d
https://orcid.org/0000-0002-2513-967X
structured and unstructured environments is particu-
larly challenging (Di Castro, 2019): the specific en-
vironments in which robots have to operate led to
the need to design ad-hoc solutions with high level
of dexterity that are not available on the market.
Maintenance and inspection work at CERN can re-
quire both ground (Di Castro et al., 2017), (D’Ago
et al., 2022) and overhead operations (Di Castro et al.,
2018b), (Gamper et al., 2021), (D’Ago et al., 2024).
The necessity of conducting operations from
above is one of the primary challenges that robotics is
increasingly being called upon to address. Examples
include the inspection and maintenance of difficult-
to-access sites and structures, such as bridges (Do-
rafshan and Maguire, 2018), (Ivanovic et al., 2021),
power lines (Cacace et al., 2021), and pipe arrays in
chemical plants (Suarez et al., 2020a). A solution to
these challenges is provided by the expanding field
of Unmanned Aerial Manipulators (UAM) (Ruggiero
et al., 2018), (Ollero et al., 2021). This field combines
aerial vehicles, such as drones, with manipulators, en-
abling not only visual inspection but also the execu-
tion of manipulation tasks at significant heights and
over extended distances. Other examples of robotic
activities from above include the inspection and dis-
mantling of nuclear sites, for which the most com-
D’Ago, G., Di Giovannantonio, S., Buonocore, L. R. and Di Castro, M.
CRANEBot: Teleoperated Crane-Suspended Robotic System for Inspection and Manipulation in Harsh Environments.
DOI: 10.5220/0012892100003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 2, pages 101-108
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
101

Figure 1: CRANEBot, crane-suspended robotic system in
its dual-arm configuration.
monly used solutions are once again drones (Jiang
et al., 2018) or robotic systems suspended from above
using cable systems (Yokokohji, 2021). Overhead op-
erations are also a fundamental aspect in the latest
installations for nuclear fusion research, where it is
necessary to perform remote handling operations in
highly radioactive zones. In this case, the most com-
monly used solutions consist of long-reach manipula-
tors (Ribeiro et al., 2011), or industrial manipulators
connected to telescopic structures extending from the
ceiling (Haines et al., 2014).
However, the robotic solutions presented are inad-
equate when the following conditions occur simulta-
neously:
• The operating environments are unstructured, and
the height of operation is variable;
• There is a requirement to perform not only visual
inspections but also heavy remote manipulation
tasks;
• The total operation time can be considerably high;
• It is essential to minimize environmental contam-
ination, especially in areas with radioactive dust.
Furthermore, the presented systems typically suffer
from the disadvantage of having a limited workload
capacity. As a result, they are unable to perform han-
dling, installation, and dismantling tasks through a
single robotic system in one operational phase.
We propose the mechatronic design and con-
trol architecture of a modular robotic system named
CRANEBot, shown in Fig. 1, which allows opera-
tions from above and extensive inspection, manipula-
tion and remote handling sessions at varying heights
with minimal impact on the unknown external envi-
ronment.
2 RELATED WORKS
This section aims to present the state of the art in
robotic systems for inspection and manipulation from
above. Robotic systems can be categorised into
two primary classes based on their operational en-
vironments: (i) systems designed for structured or
semi-structured environments, where environmental
knowledge can be utilised to grant the robot a high
degree of autonomy, and where the robot often in-
tegrates seamlessly with its surroundings; (ii) sys-
tems intended for unstructured environments, where
the robot does not inherently integrate with its sur-
roundings from a design perspective.
The first category includes numerous robotic sys-
tems designed for operations from above, commonly
used in big science facilities. In (Di Castro et al.,
2018b), a robotic system employed at CERN, known
as the Train Inspection Monorail (TIM), is presented.
This system entails a train that moves along an over-
head monorail within the Large Hadron Collider
(LHC) tunnel, which comprises several modules in-
cluding a wagon designed for overhead manipulation,
equipped with robotic arms for handling and mea-
surement tasks from above, as illustrated in Fig. 2a.
In (Gamper, 2024), a study is presented on the devel-
opment and deployment of a robotic system within
the 100 km-long tunnel of the Future Circular Col-
lider (FCC) at CERN. This system comprises a trol-
ley mounted on a double rail, capable of bidirectional
movement. Attached to the trolley is a 9-degree-of-
freedom robotic arm, enabling inspection and manip-
ulation tasks from above. These functionalities are
crucial for reducing human intervention in such an
extensive workspace. In (Graves and Dayton, 2011)
and (Haines et al., 2014), the robotic system utilised
at the Spallation Neutron Source (SNS), a nuclear fu-
sion facility characterised by high radiation levels, is
presented. This system, depicted in Fig. 2b, is meant
to handle and place experimental samples within the
SNS instrumentation. The system is a telerobotic
dual-arm servomanipulator mounted at the end of a
vertical telescoping boom, which is in turn attached
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
102

to a traversing gantry. The system at the European
Spallation Source (ESS) (Gahl, 2015) is used instead
for remote handling within the Active Cells Facility.
It consists of a dual-arm system suspended on rails at
an approximate height of 7 meters from the ground
and connected via a telescopic boom. However, all
the presented systems are closely tied to their opera-
tional environment both in terms of functionality and
design, which limits their use in an unknown environ-
ment.
To overcome this limitation, one possibility is of-
fered by aerial platforms such as drones, which are
ideal for working in unknown and unstructured en-
vironments. These systems are capable of being
positioned throughout the whole three-dimensional
space. They are well-suited for outdoor visual
inspection (Falorca et al., 2021), and recent re-
search allows their use even in GNSS-denied environ-
ments (Mostafa et al., 2018). When interaction with
the environment is needed, manipulators can be in-
stalled underneath the aerial platform (Ollero et al.,
2021). However, the rigid coupling of manipulators
with drones may prove inadequate for maintaining a
safe distance between the rotors and the area to be
inspected. Therefore, the trend is to separate the ma-
nipulation structure from the transport structure using
rigid rods (Suarez et al., 2020b) or cables (Miyazaki
et al., 2019), (Lee et al., 2020). An example of this
type of solution is provided in Fig. 2c. Despite be-
ing an excellent solution for inspection and manipu-
lation tasks in unknown environments, these systems
encounter three significant limitations: (i) their in-
ability to execute heavy manipulation tasks (such as
screwing, sewing, bolting, etc.) due to the presence
of an unconstrained floating suspension platform; (ii)
diminished operation times due to the restricted space
for batteries within the aircraft and the energy ex-
pended in flight management; (iii) the potential dis-
persal of contaminating particles if radioactive dust is
present in the environment, facilitated by the airflow
generated by the rotors.
The limitations outlined are partially addressed
by solutions conceptually akin to the one devised for
the dismantling of the chimneys of Units 1/2 exhaust
stack at the Fukushima nuclear reactor (Yokokohji,
2021), as depicted in Fig. 2d. This system consists
of a large lifting beam containing all the electronics to
power and control multiple Staubli industrial manipu-
lators capable of cutting the chimney. In this scenario,
the benefits associated with the capability to operate
in an unfamiliar environment despite the absence of
inherent integration with the surroundings are facili-
tated by the option to link the system to a standard
crane. This crane then positions and lowers the sys-
Figure 2: (a) Long-reach robotic arm mounted on the Train
Inspection Monorail inside CERN’s LHC tunnel. (b) Teler-
obotic dual-arm servomanipulator mounted on a telescopic
boom at SNS
1
. (c) UAM for bird-diverter installation on
power lines, with drone and dual-arm system connected via
four ropes. (d) Multi-arm system mounted on lifting beam
hoisted by cranes for decommissioning of Fukushima nu-
clear site
2
.
tem to the desired height. Nonetheless, the system
presented is oversized for the requirements of indoor
facilities necessitating narrow spaces.
To date there is no robotic system in the literature
capable of performing both inspection tasks and time-
consuming heavy manipulation tasks in unstructured
environments (indoors and outdoors), with the need to
access narrow spaces with variable heights and with
minimal impact on the external environment.
(a) (b)
(c) (d)
3 ROBOT DESCRIPTION
This section is intended to provide the functional and
mechatronic specification of the CRANEBot robotic
platform.
3.1 Functional Specifications
This robotic system allows the execution of tasks
at considerable heights by leveraging lifting systems
(e.g. overhead and tower cranes), hence being capa-
ble of tackling all those manipulation and inspection
tasks in areas inaccessible to ground robots (wheeled
and legged). In the specific setting of CERN, where
1
Courtesy of Oak Ridge National Laboratory
2
Source: Tokyo Electric Power Company Holdings
CRANEBot: Teleoperated Crane-Suspended Robotic System for Inspection and Manipulation in Harsh Environments
103
1
1
2
2
3
3
4
4
5
5
6
6
A A
B B
C C
D D
sdigiova
24/05/2024
DESIGNED
1 / 1
CHECKED
APPROVED
RELEASED
A3
1 : 15
Scale
Designed:
Sheet
QAC
Revision
Number
LABEL:
CERN
24/05/2024
4
0
°
1
4
5
°
6
3
°
6
3
°
1
4
5
°
4
0
°
R950
R600
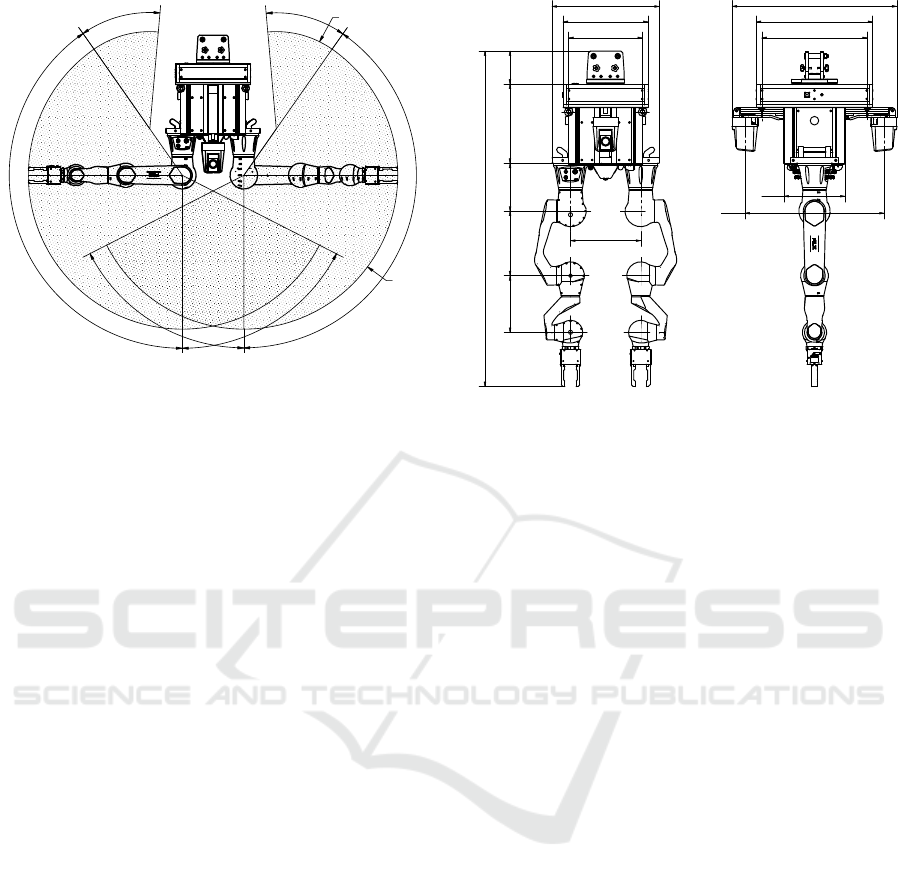
Figure 3: Robot workspace with grippers installed on the
end-effectors.
the system is currently deployed, the robot’s activities
primarily occur within hazardous areas. This hazard
stems from the radioactivity generated by the particle
accelerator, as well as the complex nature of the ma-
nipulation and inspection tasks, which pose risks to
human intervention.
The tasks encompassed by the robot include ob-
ject recognition, machinery monitoring, and defect
detection, thanks to its on-board camera system. Ad-
ditionally, manipulation, positioning, and object in-
sertion are enabled by the presence of two robotic
manipulators. Furthermore, by equipping the robotic
arms with various mechatronic tools, the robot can
undertake assembly, disassembly, screwing, centring,
measuring, and maintenance tasks. Robot’s large
workspace and overall compact dimensions, shown in
Fig. 3 and Fig. 4 respectively, make it a device capable
of accessing relatively confined spaces while ensuring
high dexterity.
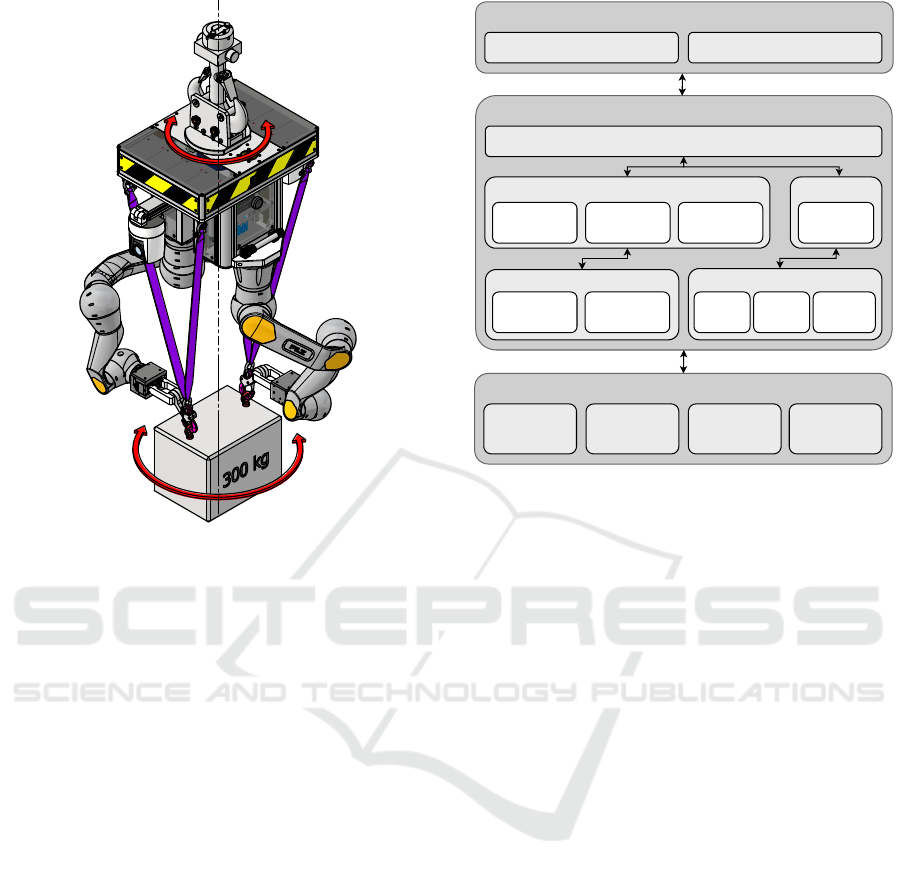
Another important innovative feature is the possi-
bility of using the robot as a rotating lifting beam for
the remote transport of loads up to 300 kg. Objects to
be transported can be hooked/released using special
hooks/lifting components handled by the manipula-
tors, slung and lifted via the 4 eye nuts installed under
the platform, and eventually rotated for accurate posi-
tioning.
3.2 Mechatronic Design
The robot’s key component is its central platform, i.e.
an aluminium frame that plays a multiple role: (i) al-
lows the connection with the crane hook; (ii) offers
an additional degree of freedom allowing the robot
to rotate around a vertical axis; (iii) supports the two
1
1
2
2
3
3
4
4
5
5
6
6
A A
B B
C C
D D
400
580
1
8
1
5
380
4
2
8
1
7
8
2
6
0
3
5
0
3
0
7
460
754
630
570
331
891
Figure 4: CRANEBot dimensions.
robotic manipulators; (iv) incorporates the on-board
camera system; (v) contains all the essential electron-
ics for powering, actuating and controlling the con-
nected systems; (vi) plays the role of lifting beam for
remote transport of additional loads. The following
will give more details on the above-mentioned points.
In its top part the robot features an adapter de-
signed to accommodate double hooks (adhering to
DIN15402 or UNI 9470/1 standards) that serves as a
safe and solid attachment point, allowing the system
to be lifted vertically and handled by the crane (see
Fig. 6). The hook adapter comprises three plates ar-
ranged in a U-shaped configuration and affixed to the
top of the platform. Upon inserting the crane hook
between the two vertical plates, it is securely held in
place by lifting pins equipped locking nuts. Addition-
ally, four threaded knobs are provided to ensure the
hook is correctly centred and its lateral movement is
restricted. Currently a set of four adapters is available
to accommodate four different DIN15402 hook sizes:
4, 6, 8, and 10. When dealing with larger hooks, it
is necessary to harness the platform by attaching two
slings to the lifting pins. The crane hook adapter is
attached to a rotational actuated joint that allows a
360-degree rotation around a vertical axis at a speed
of 4 revolutions per minute. To utilise this capabil-
ity, it is imperative to lock the rotation of the crane
hook. Thanks to this joint it is possible to rotate the
platform, and therefore the load it carries, to enable a
precise orientation positioning.
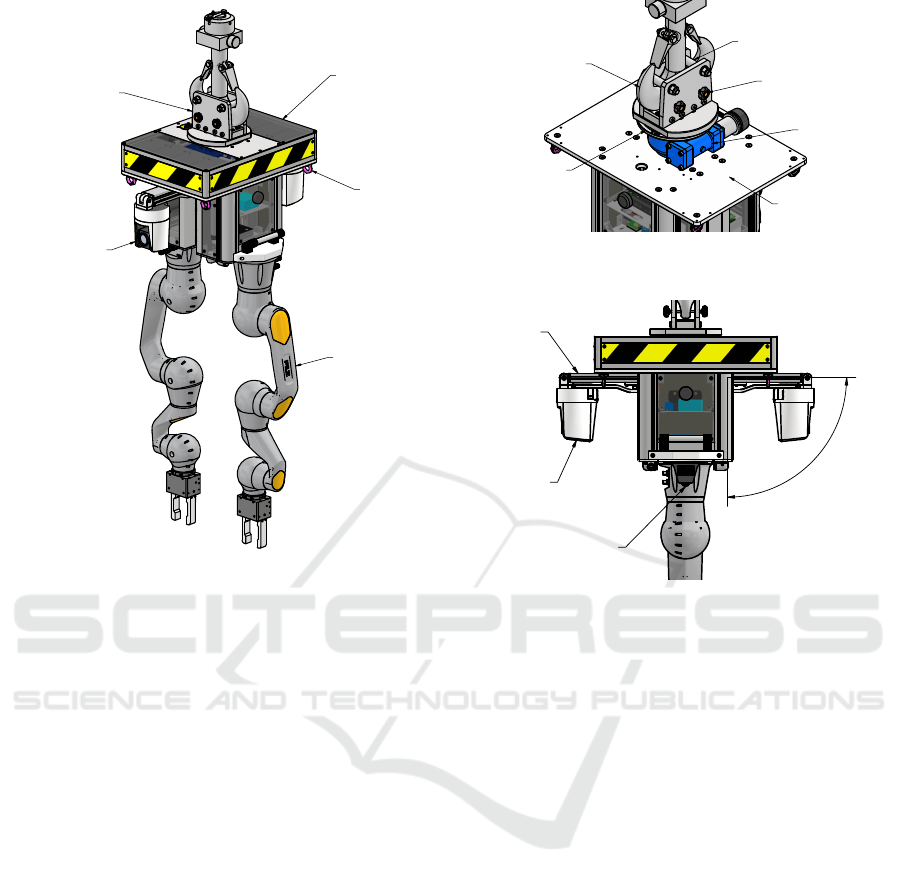
On its left and right lateral sides, the system is
equipped with two lightweight robotic arms, as shown
in Fig. 5. Currently, the system can accommodate
two manipulator models, namely PRBT6 arms man-
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
104
1
1
2
2
3
3
4
4
5
5
6
6
A A
B B
C C
D D
battery pack
eye nuts
on-board
camera system
manipulators
crane hook
adapter
Figure 5: Overview of CRANEBot mechanical design.
ufactured by PILZ and LWA4P arms manufactured
by Schunk. Both models are driven by three pairs of
actuators with perpendicular axes, named ERB mod-
ules, located at the shoulder, elbow and wrist respec-
tively, for a total of 6 revolute joints. Each ERB mod-
ule is endowed with zero-backlash Harmonic Drives
which allow precise positioning of manipulator joint.
These arms are also notably lightweight (maximum
of 19 kg per arm) and compact, and have a maximum
payload of 6 kg, allowing for high versatility with re-
spect to the mentioned tasks. The arms are also pow-
ered 24 V DC power, so they do not require an ex-
ternal large inverter. The choice of this manipulator,
besides its construction characteristics, is also due to
the possibility of not necessarily having to use a pro-
prietary control system and external control box, but
of being able to write open-source code and interface
with the firmware via the CANopen protocol.
Additionally, the central platform houses the on-
board camera system, as shown in Fig. 7. This set of
vision sensors is meant to provide a visual feedback
during inspection and teleoperation. It comprises
a panoramic camera, specifically an AXIS F1035-E
Sensor Unit, located in the lower central portion of the
frame pointing down, and two Pan-Tilt-Zoom (PTZ)
cameras, denoted as AXIS V5925, positioned on the
front and back sides of the platform. Moreover, with
the aim of enhancing the operator’s perspective and
1
1
2
2
3
3
4
4
5
5
6
6
A A
B B
C C
D D
sdigiova
28/05/2024
DESIGNED
1 / 1
CHECKED
APPROVED
RELEASED
A3
1 : 6
Scale
Designed:
Sheet
QAC
Revision
Number
LABEL:
CERN
28/05/2024
slew drive
main
support plate
lifting pins
absolute
encoder
threaded knobs
double hook
Figure 6: Detail on the hook system and the rotational actu-
ator with vertical axis positioned below the adapter.
1
1
2
2
3
3
4
4
5
5
6
6
A A
B B
C C
D D
panoramic camera
9
0
°
wings
PTZ
camera
Figure 7: Detail on the camera system and the wings open-
ing/closing feature.
visibility, a wings system enables independent move-
ment of the PTZ cameras on the sides of the platform.
The system is also pre-wired for the installation of
three additional cameras, in particular AXIS F1005-E
Sensor Units, which can serve as additional points-of-
view for observing the manipulator end-effectors.
All mentioned electromechanical devices are in-
ternally connected to each other via the platform and
are powered by 8 lead-gel 24 V batteries, which guar-
antee a total operating time of up to 8 hours, in most
situations sufficient to complete a robotic task. The
central structure houses an on-board controller PC,
a Inertial Measurement Unit for on-line pose estima-
tion, and a router for connecting the robot via 4G/5G
and WiFi.
Finally, four eye nuts are available in the corners
of the central platform facing downwards, allowing
an external suspended load of up to 300 kg to be
tied to the robot and thus transport simultaneously
the robotic system and additional object via overhead
crane. The combined handling of the two systems
(robot and load) is of fundamental importance be-
cause: (i) it allows, via the robot, to have an easy vi-
sual feedback on the handling of the load suspended
by the overhead crane, which is important when, for
example, the load has to be centred with respect to
CRANEBot: Teleoperated Crane-Suspended Robotic System for Inspection and Manipulation in Harsh Environments
105
1
1
2
2
3
3
4
4
5
5
6
6
A A
B B
C C
D D
Figure 8: Robot handling an external load (max. 300 kg),
with the manipulators in the configuration to hook/release
the load.
fixed supports; (ii) once it has been positioned in the
space via the overhead crane, it allows immediate ma-
nipulation on the load (e.g. screwing it onto a sup-
port) in the same operational phase, without the need
to separate the two handling actions.
4 CONTROL
The robot operates in a remote, hazardous area, con-
trolled through its on-board computer, which inter-
faces with all physical components, including motor
drivers, cameras, and sensors. This computer runs
a robotic framework that processes sensory data and
manages both control functions and communications.
Operators interact with the robot through a Graphical
User Interface (GUI) connected over available net-
works. There are two types of interfaces developed
for use at CERN: a 2D GUI and a 3D Mixed Reality
GUI (Szczurek et al., 2023), both created with Unity
and C#. Depending on the specific setup, communi-
cation between the robot and the GUIs can occur via
a 4G network, WiFi, or a wired network connection.
Robot Base Robot Arms Tools
CRANEBot Hardware
Sensors
CERN Robotic Framework
CERN Robotic GUI
2D GUI 3D Mixed Reality GUI
CANOpen
Motor drivers
Actuators
Tools motors
Sensors
Cameras IMU
Radiation
measure
Motion control Kinematics
Control
Trajectory
generator
High level communication
Vision
Object
recognition
Figure 9: Overview of control architecture.
4.1 Control Architecture
The CERN Robotic Framework, abbreviated as
CRF (Di Castro et al., 2018a), is a modular software
architecture developed at CERN for supervised tele-
operation and autonomous inspection in hazardous
environments. It is a fully in-house solution essen-
tial for controlling CERN’s pool of robots. The CRF
covers all the software aspects required for using a
robot, ranging from low-level driver implementations,
through middleware communication, to communica-
tion with the user interface for teleoperations. The
framework is written in standard C++17 and uses
CMake as its building tool. The framework is cur-
rently ran and tested on Ubuntu 20.04 and Ubuntu
22.04 distributions. As shown in Fig. 9, the CERN
Robotic Framework decomposes into a set of in-
terconnected modules. These include modules for
low-level communication with actuators and sensors,
modules for control, kinematics management, and
trajectory generation, modules for vision algorithms,
and modules for data exchange with user interfaces.
4.2 Graphical User Interface
At the top of the control architecture is the Graphical
User Interface (GUI), which allows the teleoperator to
control all the main components of the robot and be
informed about its current status. To enable remote
operations, the user connects via 4G or WiFi to the
same network as the robot. This setup allows the ini-
tiation of the so-called communication points, which
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
106

(a) (b) (c)
Figure 10: Robotic interventions and tests conducted at CERN with CRANEBot.
are software modules developed within the CRF that
establish the connection between the robot and the
GUI. For this purpose, the Transmission Control Pro-
tocol (TCP) is used. The communication points also
initiate the control loops for the central platform and
the arms, ensuring that command signals can be trans-
mitted from the interface to the robot’s joints. In the
specific case of the CRANEBot, the teleoperator can
control the central platform, which includes the ro-
tational joint with vertical axis and the wings, the
robotic arms, and the tools. Video information from
the on-board camera system is streamed in real-time
to the interface.
The interface also provides a visualisation of a
three-dimensional model of the robot, i.e. a graphi-
cal representation of the system’s current state. This
is crucial for the operator to understand the robot’s
configuration, offering an external view that comple-
ments the on-board camera views.
5 VALIDATION: ROBOTIC
OPERATIONS
The robot’s functionalities and control architecture
have been validated in real operations within CERN
facilities, as demonstrated by the examples shown in
Fig. 10. As mentioned in Section 3.2, the robot can
be integrated with different types of cranes and can
be equipped with different types of arms and tools.
In Fig. 10a the CRANEBot is shown equipped with
Schunk LWA4P manipulators and grippers, transport-
ing a vacuum module connected to the platform via
slings. The module is to be installed on a fixed sup-
port and aligned with the beamline within the Com-
pact Muon Solenoid (CMS) experiment. The devices
required for the installation are shown in Fig. 10b,
where one of the two manipulators, in this case PILZ
PRBT6, is equipped with a screwdriver for tighten-
ing the vacuum connections. Finally, in Fig. 10c, the
robot is shown tightening a vacuum tank flange using
an impact driver.
6 CONCLUSIONS
This study presents an innovative robotic system de-
veloped at CERN, called CRANEBot, capable of
performing remote operations in harsh environments
where access from above is required. Its design al-
lows the use of different robotic arms and differ-
ent tools, making it capable of long inspection ses-
sions and heavy manipulation. Finally, the robot is
also configured as a mechanical interface, i.e., lifting
beam, with respect to another load to be transported,
allowing components to be placed and installed eas-
ily and effectively. The system has been validated in
numerous tests and robotic interventions, successfully
performing the required tasks.
REFERENCES
Bellingham, J. G. and Rajan, K. (2007). Robotics in remote
and hostile environments. science, 318(5853):1098–
1102.
CRANEBot: Teleoperated Crane-Suspended Robotic System for Inspection and Manipulation in Harsh Environments
107

Cacace, J., Orozco-Soto, S. M., Suarez, A., Caballero, A.,
Orsag, M., Bogdan, S., Vasiljevic, G., Ebeid, E., Ro-
driguez, J. A. A., and Ollero, A. (2021). Safe local
aerial manipulation for the installation of devices on
power lines: Aerial-core first year results and designs.
Applied Sciences, 11(13):6220.
D’Ago, G., Lefebvre, M., Buonocore, L. R., Ruggiero, F.,
Di Castro, M., and Lippiello, V. (2022). Modelling
and control of a variable-length flexible beam on in-
spection ground robot. In 2022 International Con-
ference on Robotics and Automation (ICRA), pages
8224–8230. IEEE.
Di Castro, M. (2019). A novel robotic framework for safe
inspection and telemanipulation in hazardous and un-
structured environments. PhD thesis, Industriales.
Di Castro, M., Buonocore, L. R., Ferre, M., Gilardoni,
S., Losito, R., Lunghi, G., Masi, A., et al. (2017).
A dual arms robotic platform control for naviga-
tion, inspection and telemanipulation. In Proceed-
ings of the 16th International Conference on Ac-
celerator and Large Experimental Control Systems
(ICALEPCS’17), Barcelona, Spain, pages 8–13.
Di Castro, M., Ferre, M., and Masi, A. (2018a). Cern-
tauro: A modular architecture for robotic inspection
and telemanipulation in harsh and semi-structured en-
vironments. IEEE Access, 6:37506–37522.
Di Castro, M., Tambutti, M. B., Ferre, M., Losito, R.,
Lunghi, G., and Masi, A. (2018b). i-tim: A
robotic system for safety, measurements, inspection
and maintenance in harsh environments. In 2018 IEEE
International Symposium on Safety, Security, and Res-
cue Robotics (SSRR), pages 1–6. IEEE.
Dorafshan, S. and Maguire, M. (2018). Bridge inspec-
tion: Human performance, unmanned aerial systems
and automation. Journal of Civil Structural Health
Monitoring, 8:443–476.
D’Ago, G., Selvaggio, M., Suarez, A., Ga
˜
n
´
an, F. J., Buono-
core, L. R., Di Castro, M., Lippiello, V., Ollero, A.,
and Ruggiero, F. (2024). Modelling and identification
methods for simulation of cable-suspended dual-arm
robotic systems. Robotics and Autonomous Systems,
175:104643.
Falorca, J. F., Miraldes, J. P., and Lanzinha, J. C. G. (2021).
New trends in visual inspection of buildings and struc-
tures: Study for the use of drones. Open Engineering,
11(1):734–743.
Gahl, T. (2015). The modular control concept of the neu-
tron scattering experiments at the european spallation
source ess. Proceedings of ICALEPCS15, pages pp–
529.
Gamper, H. (2024). A robotic system for cern’s future cir-
cular collider/submitted by dipl. ing. hannes gamper
bsc.
Gamper, H., Gattringer, H., M
¨
uller, A., and Di Castro,
M. (2021). Design optimization of a manipulator for
cern’s future circular collider (fcc). In ICINCO, pages
320–329.
Graves, V. B. and Dayton, M. J. (2011). Core vessel insert
handling robot for the spallation neutron source. Tech-
nical report, Oak Ridge National Lab.(ORNL), Oak
Ridge, TN (United States). Spallation . . . .
Haines, J., McManamy, T., Gabriel, T., Battle, R., Chipley,
K., Crabtree, J., Jacobs, L., Lousteau, D., Rennich,
M., and Riemer, B. (2014). Spallation neutron source
target station design, development, and commission-
ing. Nuclear Instruments and Methods in Physics Re-
search Section A: Accelerators, Spectrometers, Detec-
tors and Associated Equipment, 764:94–115.
Ivanovic, A., Markovic, L., Car, M., Duvnjak, I., and Orsag,
M. (2021). Towards autonomous bridge inspection:
Sensor mounting using aerial manipulators. Applied
Sciences, 11(18):8279.
Jiang, G., Voyles, R. M., and Choi, J. J. (2018). Precision
fully-actuated uav for visual and physical inspection
of structures for nuclear decommissioning and search
and rescue. In 2018 IEEE international symposium
on safety, security, and rescue robotics (SSRR), pages
1–7. IEEE.
Lee, J., Balachandran, R., Sarkisov, Y. S., De Stefano,
M., Coelho, A., Shinde, K., Kim, M. J., Triebel, R.,
and Kondak, K. (2020). Visual-inertial telepresence
for aerial manipulation. In 2020 IEEE International
Conference on Robotics and Automation, pages 1222–
1229.
Miyazaki, R., Jiang, R., Paul, H., Huang, Y., and Shi-
monomura, K. (2019). Long-reach aerial manipu-
lation employing wire-suspended hand with swing-
suppression device. IEEE Robotics and Automation
Letters, 4(3):3045–3052.
Mostafa, M., Zahran, S., Moussa, A., El-Sheimy, N., and
Sesay, A. (2018). Radar and visual odometry inte-
grated system aided navigation for uavs in gnss denied
environment. Sensors, 18(9):2776.
Ollero, A., Tognon, M., Suarez, A., Lee, D., and Franchi,
A. (2021). Past, present, and future of aerial robotic
manipulators. IEEE Transactions on Robotics.
Ribeiro, I., Damiani, C., Tesini, A., Kakudate, S., Siuko,
M., and Neri, C. (2011). The remote handling systems
for iter. Fusion Engineering and Design, 86(6-8):471–
477.
Ruggiero, F., Lippiello, V., and Ollero, A. (2018). Aerial
manipulation: A literature review. IEEE Robotics and
Automation Letters, 3(3):1957–1964.
Suarez, A., Caballero, A., Garofano, A., Sanchez-Cuevas,
P. J., Heredia, G., and Ollero, A. (2020a). Aerial ma-
nipulator with rolling base for inspection of pipe ar-
rays. IEEE Access, 8:162516–162532.
Suarez, A., Real, F., Vega, V. M., Heredia, G., Rodriguez-
Castano, A., and Ollero, A. (2020b). Compliant bi-
manual aerial manipulation: Standard and long reach
configurations. IEEE Access, 8:88844–88865.
Szczurek, K. A., Prades, R. M., Matheson, E., Rodriguez-
Nogueira, J., and Di Castro, M. (2023). Multimodal
multi-user mixed reality human–robot interface for re-
mote operations in hazardous environments. IEEE Ac-
cess, 11:17305–17333.
Trevelyan, J., Hamel, W. R., and Kang, S.-C. (2016).
Robotics in hazardous applications. Springer hand-
book of robotics, pages 1521–1548.
Yokokohji, Y. (2021). The use of robots to respond to nu-
clear accidents: Applying the lessons of the past to the
fukushima daiichi nuclear power station. Annual Re-
view of Control, Robotics, and Autonomous Systems,
4:681–710.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
108
