
Multiple Model Iterative Learning Control of FES Electrode Arrays
Lucy Hodgins
a
, Chris T. Freeman
b
and Zehor Belkhatir
c
School of Electronics and Computer Science, University of Southampton, Southampton, U.K.
Keywords:
Iterative Learning Control, Functional Electrical Stimulation, Multiple Model Switched Adaptive Control,
Stroke Rehabilitation.
Abstract:
Stroke is a common cause of hand and upper limb disability, but current rehabilitation approaches do not ade-
quately support successful recovery. Functional electrical stimulation (FES) is the most widely used assistive
technology, and is able to support accurate hand and wrist motion when applied using multi-element electrode
arrays. However, accurate movements have only been possible using an iterative learning control (ILC) ap-
proach involving many repeated model identification tests. This lengthy process limits wide-spread use. This
paper presents a solution for FES electrode array control using estimation-based multiple-model ILC (EM-
MILC), in which a set of parameterised models is used to automatically update the stimulation applied to each
array element every time a task is carried out. This removes the need for model identification, significantly
improving system usability whilst maintaining high performance. Experimental results demonstrate that EM-
MILC reduces the average number of tests from 16 to 3, compared to the most accurate existing approach.
1 INTRODUCTION
Stroke is a leading cause of disability worldwide, with
over 12 million new cases each year (Feigin et al.,
2022). Approximately half of suffers are left with
some form of hand or upper limb impairment, which
significantly impacts their quality of life (Persson
et al., 2012). Movement can be regained through con-
tinued repetitive practice of functional tasks, which
strengthens neural connections in the brain (Hebbian
learning (Hebb, 1949)). However, the level of support
provided by conventional physiotherapy is typically
inadequate (Stockley et al., 2019), and 62% of people
with severe impairment fail to regain dexterous hand
motion within six months (Kwakkel et al., 2003).
This motivates the use of assistive technologies,
the most common of which is functional electrical
stimulation (FES) (Hughes et al., 2014), in which
nerves are stimulated via surface electrodes to arti-
ficially contract the underlying muscles. Hand move-
ment requires the coordinated motion of a large num-
ber of different muscles, which makes FES control
challenging. In recent years electrode arrays have en-
abled more selective stimulation of hand and wrist
a
https://orcid.org/0000-0001-6109-0546
b
https://orcid.org/0000-0003-0305-9246
c
https://orcid.org/0000-0001-7277-3895
muscles (Schill et al., 2009; Salchow et al., 2016;
O’Dwyer et al., 2006), with the best results arising
through use of iterative learning control (ILC) (Free-
man, 2014; Sun and Freeman, 2024). ILC utilises the
repetitive nature of rehabilitation to improve perfor-
mance by updating the control signal using data from
previous attempts. However, existing ILC approaches
require lengthy identification procedures, meaning
they have not yet translated into clinical practice.
The need for model identification can be mitigated
by fusing ILC with adaptive control. One adaptive
approach that has previously shown promise in the
context of FES is multiple model switched adaptive
control (MMSAC) (Brend et al., 2015), in which a set
of controllers are designed based on a set of system
models that capture the presumed uncertainty. The
framework determines which plant most closely fits
the system behaviour at a given point in time, be-
fore switching the corresponding controller into the
closed-loop. The MMSAC framework was adapted
for use with ILC in (Freeman and French, 2015) to
create a framework termed estimation-based multiple
model ILC (EMMILC).
This work extends the EMMILC architecture for
use with a general class of non-linear systems. This
involves defining a principled design framework for
specification of the plant model set and controller
properties, together with a computationally efficient
Hodgins, L., Freeman, C. T. and Belkhatir, Z.
Multiple Model Iterative Learning Control of FES Electrode Arrays.
DOI: 10.5220/0012892900003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 1, pages 537-544
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
537
estimator structure to determine the controller switch-
ing. The EMMILC framework is then applied to con-
trol hand and wrist motion using an FES electrode
array. Experimental results compare it with the best
existing approach, and confirm its practical efficacy.
This paper is structured as follows. Section 2 in-
troduces the necessary background, including a com-
prehensive model of the hand and wrist stimulated by
an FES array, and an overview of ILC. The nonlin-
ear EMMILC framework is developed in Section 3,
and Section 4 applies it to FES array based hand and
wrist control. Experimental results are then presented
in Section 5 before Section 6 concludes the paper.
2 PROBLEM DESCRIPTION AND
PRELIMINARIES
FES electrode arrays are composed of n separate elec-
trodes pads, that are arranged in fixed pattern. They
are typically printed on polycarbonate and have a hy-
drogel layer that is placed on the surface of the skin.
An FES sequence u(t) ∈ R
n
is applied to these elec-
trodes over time instances t = 0,1,...,N, and the aim
is to precisely assist the patient’s movement. This
is done by selecting a set of q clinically-relevant
joint angles y(t) ∈ R
q
and requiring they track a pre-
defined reference signal trajectory y
d
(t) ∈ R
q
.
Since stroke rehabilitation requires repeated task
practice, each attempt or ‘iteration’ of a task is de-
noted by introducing an additional argument, with
variable k = 1,2,.... The control aim is to compute
input u(k,t) such that the error e(k,t) = y
d
(t)−y(k,t)
decreases with each sucessive iteration, i.e.
lim
k→∞
e(k,t) = 0, t = 0,1,...,N − 1. (1)
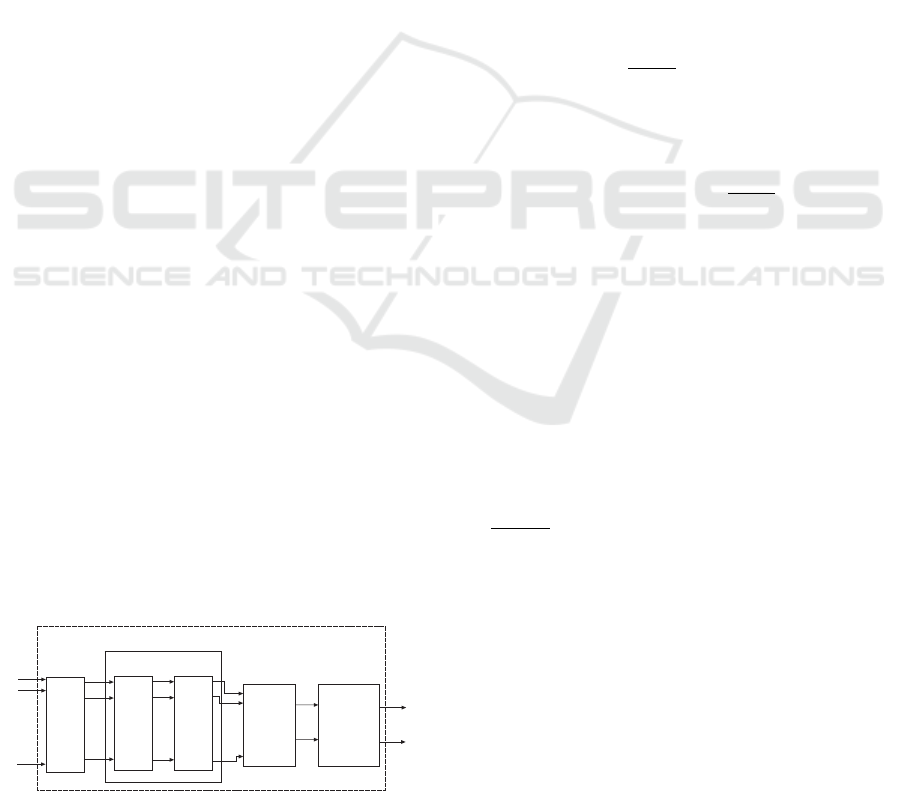
2.1 Hand and Wrist Structure
The dynamics of the electrically stimulated hand and
wrist consists of four key components: the electrode
array, the muscle dynamics, the non-linear tendon net-
work, and the rigid body dynamics. Their connection
is shown in Figure 1, denoted using operator G
∗
.
IRC
LAD
Tendon
network
R(y)
Muscles
Rigid
Body
Dynamics
Electrode array
F
1
F
2
u
1
u
2
z
1
z
2
z
l
v
1
v
2
v
l
u
n
F
l
τ
1
τ
q
..............
...
y
G
*
θ
1
θ
q
}
Figure 1: Hand and wrist model structural components.
The stimulation experienced by the ith muscle can
be modelled as a linear combination of the FES ap-
plied to each element of the n channel electrode array.
The stimulation signal v(k,t) ∈ R
l
experienced by the
l underlying muscles therefore has elements
v
i
(k,t) =
n
∑
j=1
a
i, j
u
j
(k,t), i = 1,...,l (2)
where a
i, j
∈ R
+
is the contribution of the jth array
element to the ith muscle (Freeman et al., 2016).
The dynamics of the ith muscle can be accu-
rately modelled by a Hammerstein structure, com-
prising a static function h
IRC,i
(v
i
(k,t)) which mod-
els the isometric recruitment curve (IRC), cascaded
with linear activation dynamics (LAD) (Le et al.,
2010). The latter are denoted by the state-space triple
{M
A,i
,M
B,i
,M
C,i
} with state ˜x
i
(k,t). The generated
force F
i
(k,t) then feeds into a tendon network which
generates a moment about each joint angle. The
moment arm of the ith muscle about the pth joint
is computed using
dE
i
(y
p
)
dy
p
where continuous function
E is the associated tendon excursion (Feldman and
Latash, 2005). Therefore the overall moment vec-
tor generated by stimulating all muscles is τ(k,t) =
R(y(k,t))F(k,t) where the (p,i)th element of moment
arm matrix R(y(k,t)) ∈ R
q×l
is
dE
i
(y
p
)
dy
p
(k,t).
The moment vector actuates the passive rigid body
dynamics of the system which take the general form
M(y(k,t)) ¨y(k,t) +C(y(k,t), ˙y(k,t)) + G(y(k,t))
+ K(y(k,t), ˙y(k,t)) = τ(k,t) (3)
where M(·) denotes the inertia matrix, C(·,·) is the
Coriolis matrix, G(·) the gravity vector, and K(·,·)
captures joint stiffness, damping and friction effects.
Combining the above four components yields the
overall dynamic system
dx(k,t)
dt
=
x
2
(k,t)
M(x
1
(k,t))
−1
X(x(k,t))
M
A,1
˜x
1
(k,t)
.
.
.
M
A,l
˜x
l
(k,t)
+
0
0
M
B,1
h
IRC,1
( ¯a
1
u(k,t))
.
.
.
M
B,l
h
IRC,l
( ¯a
l
u(k,t))
, (4)
y(k,t) =
I 0 ... 0
x(k,t) := h(x(k,t)), (5)
where state vector x(k,t) =
[x
1
(k,t)
⊤
,x
2
(k,t)
⊤
, ˜x
1
(k,t)
⊤
,··· , ˜x
l
(k,t)
⊤
]
⊤
and
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
538

output y(k,t) = [θ
1
(k,t),..., θ
q
(k,t)]
⊤
, with x
1
:= y,
x
2
:= ˙y. In addition, ¯a
i
= [a
i,1
,...,a
i,n
] and
X(x(k,t)) = R(x
1
(k,t))
M
C,1
˜x
1
(k,t)
.
.
.
M
C,l
˜x
l
(k,t)
− G(x
1
(k,t))
−C(x
1
(k,t),x
2
(k,t))− K(x
1
(k,t),x
2
(k,t)).
State-space system (4) is then discretised to give
x(k,t + 1) = f (x(k,t),u(k,t)), x(k, 0) = x
0
,
y(k,t) = h(x(k,t)), t = 0,1,...,N − 1.
(6)
2.2 ILC Background
Since stroke rehabilitation requires repeated move-
ments, ILC is a natural choice and has been used suc-
cessfully in five clinical trials (focusing on elbow and
shoulder motion) (Freeman, 2016). ILC is designed to
be applied to tasks carried out repeatedly, and uses er-
ror information from each previous iterations to suc-
cessively improve tracking performance.
To apply ILC, the system dynamics are efficiently
packaged using the ‘lifted’ supervector notation
1
u(k) = [u(k,0)
⊤
,u(k,1)
⊤
,...,u(k,N − 1)
⊤
]
⊤
, (7)
y(k) = [y(k,1)
⊤
,y(k,2)
⊤
,...,y(k,N)
⊤
]
⊤
, (8)
y
d
= [y
d
(1)
⊤
,y
d
(2)
⊤
,...,y
d
(N)
⊤
]
⊤
, (9)
so that dynamics (6) can be equivalently written as
y(k) = g(u(k)), such that (10)
g(u(k)) = [g
1
(u(k))
⊤
,...,g
N
(u(k))
⊤
]
⊤
, (11)
with elements i = 1, 2,...,N given by
g
i
(x(k, 0),u(k,0),...,u(k,i − 1))
= h( f ( f (... f ( f (x(k,0),u(k,0)),u(k, 1)), ...
...,u(k,i − 2)),u(k,i − 1)))). (12)
The most common form of ILC update is
u(k + 1) = u(k) + Le(k), (13)
in which e(k) = y
d
− y(k) and L ∈ R
nN×qN
is a suit-
able learning operator. For linear systems there are
numerous options to design L to balance convergence
and robustness, and these have been extended to the
non-linear case by linearising the system between
each trial about its current operating point (Freeman,
2014; Lin et al., 2006). For example, when applied to
gradient-based ILC, the learning operator is given by
L = γ(g
′
(u(k)))
⊤
, (14)
1
The two-argument form u(k,t) will be used to denote
the along-the-trial form of a signal, with a single argument
denoting the lifted form.
where g
′
(u(k)) is the Jacobian of g(u(k)), given by
g
′
(u(k)) :=
∂g(u)
∂u
u=u(k)
=
∂g
1
(u)
∂u(k)
1
...
∂g
1
(u)
∂u(k)
n
.
.
.
.
.
.
.
.
.
∂g
q
(u)
∂u(k)
1
.
.
.
∂g
q
(u)
∂u(k)
n
.
(15)
2.3 Robust Stability of Standard ILC
Identifying g(u(k)) is exceptionally challenging due
to the complexity of the human hand, which is sensi-
tive to minor changes in electrode position and phys-
iology. It also varies significantly between individu-
als, and over time due to fatigue. The approach used
by (Freeman, 2014) was to identify g
′
(u(k)) between
each iteration by carrying out an identification test on
the patient, however this took over 10 minutes to track
a single reference movement, making it unsuitable for
practical use. One possible solution is to design L to
maximise robustness, potentially using a single nom-
inal model. The remainder of this section demon-
strates the limitations of such an approach.
Define G
∗
as a lifted operator representing the
true plant with the general dynamic form (10). De-
fine C as the lifted operator corresponding to ILC
scheme (13). These are configured as shown in Fig-
ure 2, where the signals have been renamed to account
for the external disturbances (u
0
(k), y
0
(k))
⊤
. Hence
(u
1
(k), y
1
(k)) denotes the plant input and output, and
(u
2
(k), y
2
(k))
⊤
the ILC update and measured error
signals. The operators can then be defined as
G
*
C
u
1
u
0
u
2
y
1
y
0
y
d
y
2
+
+
-
+
+
Figure 2: True plant and ILC feedback configuration.
G
∗
: u
1
7→ y
2
, y
1
(k) = g(u
1
(k)), (16)
and
C : y
2
7→ u
2
, u
2
(k + 1) = u
2
(k) + L
k
y
2
(k).
(17)
Since the true plant is unknown, the designer only
has access to a non-linear model g
p
(u(k)), giving
G
p
: u
1
7→ y
1
, y
1
(k) = g
p
(u
1
(k)), (18)
which is used to design a stabilising ILC law
C
p
: y
2
7→ u
2
, u
2
(k + 1) = u
2
(k) + L
k,p
y
2
(k),
(19)
Multiple Model Iterative Learning Control of FES Electrode Arrays
539
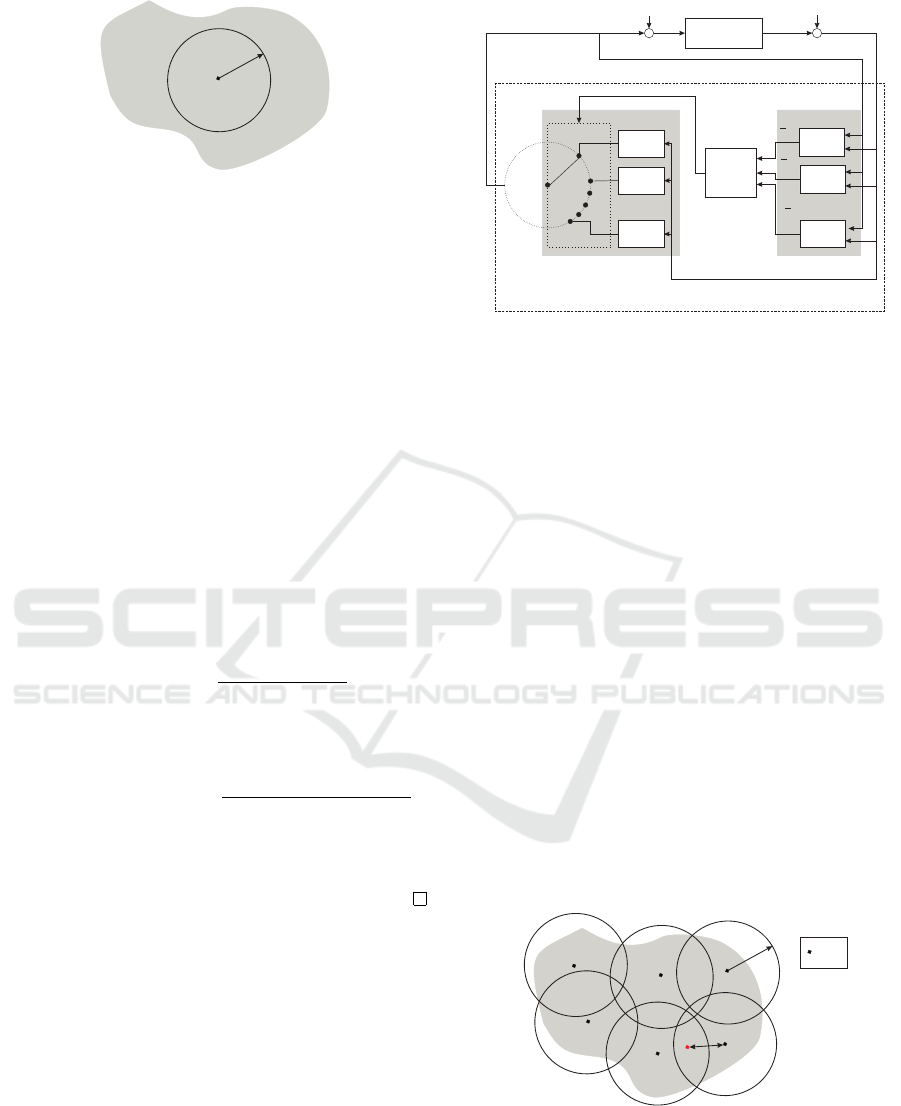
|| ||Π
Gp/Cp
-1
G
p
U
Figure 3: Uncertainty space showing stability region using
a single ILC update designed for model G
p
.
where L
k,p
is designed based on the linearisation (15)
of the model G
p
.
The difference between plant model G
p
and the
true system G
∗
can be captured by the well-known
gap metric, denoted δ(G
p
,G
∗
), which is a bound on
a mapping between their graphs. Using this metric,
the following theorem lays out the conditions under
which C
p
is able to stabilise the true plant G
∗
.
Theorem 1. Let ILC update C
p
be designed such
that the closed-loop system [G
p
,C
p
] is gain stable, i.e.
the map Π
G
p
//C
p
: (u
0
,y
0
)
⊤
→ (u
1
,y
1
)
⊤
from exter-
nal disturbances to internal signals has a finite bound.
Then the true closed-loop system [G
∗
,C
p
] will be gain
stable if the model mismatch satisfies
δ(G
p
,G
∗
) < ∥Π
G
p
//C
p
∥
−1
. (20)
Furthermore, the gap can be directly related to the
underlying vector function forms as
δ(G
p
,G
∗
) ≤ sup
∥u∦=0
∥g
p
(u) − g
∗
(u)∥
∥u∥
, (21)
and if ILC is designed based on the sequence of lin-
earised models {g
′
p
(u(k))}
k∈N
, this equates to
δ(G
p
,G
∗
) ≤ sup
k∈N, ∥u∦=0
∥(g
′
p
(u(k)) − g
∗
|
u(k)
)u∥
∥u∥
,
where g
∗
|
u(k)
u := g
∗
(u + u(k)) − g
∗
(u(k)).
Proof. Adapted from (Georgiou and Smith, 1997)
This states that ILC stabilises a ‘ball’ of plants
with radius ∥Π
G
p
//C
p
∥
−1
centred around G
p
, as
shown in Figure 3. However, if the model mismatch is
too large, this region may not include G
∗
and [G
∗
,C
p
]
will be unstable. This motivates multiple-model ILC,
in which extra models and corresponding controllers
are added to stabilise any possible true plant.
3 EMMILC STRUCTURE
EMMILC builds on the more general multiple
model switched adaptive control (MMSAC) frame-
work (Buchstaller and French, 2016). This section
G
*
argmin
X
1
X
m
X
2
C
1
C
2
C
m
y
1
y+y
0 d
y
2
y
2
u
1
+
+
+
+
u
0
r
1
r
2
r
m
C X
...
...
u
2
EMMILC controller
Figure 4: EMMILC block diagram.
extends it for application to nonlinear systems. The
idea of EMMILC is to design a set of plant models
G = {G
1
,...,G
m
} with associated ILC controllers C =
{C
1
,...,C
m
} such that a plant located anywhere within
a user-defined uncertainty space U will be stabilised
by one of these controllers. Switching between con-
trollers is determined using a bank of estimators,
X
1
,...,X
m
, which compute a residual for each plant
model. Each residual measures how closely a par-
ticular model matches the measured signals (u
2
,y
2
),
and the model with smallest residual is switched into
closed-loop. Figure 4 shows the overall structure.
Based on the underlying theory in (Freeman and
French, 2015), there are two conditions that must be
satisfied to guarantee overall stability:
(i)
∃ G
i
∈ G, s.t. δ(G
i
,G
∗
) < ρ(G,C,U). (22)
(ii)
∃ C
i
∈ C , s.t. ∥Π
G//C
i
∥ < ∞ ∀G ∈ U. (23)
where ρ(·) is defined in (Freeman and French, 2015).
These ensure that the models {G
1
,...,G
m
} are suffi-
ciently close together, and that there exists a controller
within the set C able to stabilise all plants within the
uncertainty space, as illustrated in Figure 5.
|| ||Π
Gp/Cp
-1
G
p
G
*
< ( , , )ρ GCU
U
∈G
Figure 5: Model set requirements (22) and (23).
3.1 Estimator Design
Estimator X
p
: (u
2
,y
2
)
⊤
7→ r
p
computes the smallest
disturbance estimate (u
0
,y
0
) needed to explain the
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
540

observed signals (u
2
,y
2
) under the assumption that
model G
p
is the true plant. Let N
[a,b]
p,k
(u
2
,y
2
) be
the set of all possible disturbances compatible with
G
p
and observed signals (u
2
(k), y
2
(k)) over iterations
a,a + 1, . ..,b. Then the residual is computed as
r
p
(k) := inf
w
0
{r ≥ 0 | r = ∥w
0
∥, w
0
∈ N
[0,k]
p,k
(u
2
,y
2
)}
(24)
The next theorem shows how this can be com-
puted recursively, and provides a computationally
tractable upper bound which can replace r
p
(k).
Theorem 2. Residual computation (24) can be solved
recursively using
r
p
(k) = ∥r
p
(k − 1),i
p
(k)∥, r
p
(0) = 0, (25)
where the residual calculation for only iteration k is
i
p
(k) = inf
w
0
{r ≥ 0 | r = ∥w
0
∥, w
0
∈ N
[k,k]
p,k
(u
2
,y
2
)}
(26)
Furthermore, i
p
(k) has the upper bound
∥y
2
(k) − g
p
(u
2
(k))∥ (27)
so that an upper bound, ˜r
p
(k), can be computed as
˜r
p
(k) =
v
u
u
t
k
∑
i=0
∥y
2
(i) − g
p
(u
2
(i))∥
2
(28)
Proof. Relations (25), (26) follows from the l
2
iden-
tify ∥∥x∥,∥y∥∥ = ∥(x, y)∥ for x, y ∈ l
2
, and the fact that
the dynamics of one ILC trial do not affect the next.
From Fig. 4, the signals compatible with G
p
satisfy
y
2
(k) = g
p
(u
2
(k) + u
0
(k)) + y
0
(k). An upper bound
on (26) is achieved by setting u
0
= 0 to obtain
i
p
(k) ≤ inf
y
0
,u
0
=0
{r ≥ 0 | r = ∥w
0
∥, w
0
∈ N
[k,k]
p,k
(u
2
,y
2
)}
= inf
y
0
,u
0
=0
{r ≥ 0 | r =
u
0
(k)
y
0
(k)
,
y
0
= y
2
(k) − g
p
(u
2
(k) + u
0
(k))},
= ∥y
2
(k) − g
p
(u
2
(k))∥ (29)
and (28) follows by combining (29) and (25).
Remark 1. Lifted residual calculation (28) can be
modified to account for parameter variation, e.g. due
to muscle fatigue, by introducing a discount factor
0 ≤ λ < 1 such that
˜r
p
(k) =
v
u
u
t
k
∑
i=1
λ
k−i
∥y
2
(i) − g
p
(u
2
(i))∥
2
(30)
4 FRAMEWORK APPLICATION
EMMILC is now applied to FES array motion control.
4.1 EMMILC Design Procedure
The following steps outline the practical implementa-
tion of the EMMILC framework.
1. Model structure: Establish a suitable parame-
terised form to capture the true plant g
∗
(u).
2. Uncertainty space U: Identify the range in
model parameters necessary to capture the vari-
ation in the true dynamics. The set union is U.
3. Controller design procedure: Formulate an ILC
design procedure K : G
p
→ C
p
that stabilises the
closed-loop [G
p
,C
p
]. This will balance conver-
gence with robustness, as measured by (20).
4. Model set G: Construct a model set G with cor-
responding controller set C to give sufficient cov-
erage of the uncertainty space. Criteria (22) and
(23) can be combined into a single condition
∀ G
i
, ∃G
j
∈ G, G
i
̸= G
j
, s.t. δ(G
i
,G
j
) < ∆,
(31)
where parameter ∆ defines the maximum distance
between neighbouring models. Smaller values
will improve the likelihood of a stable design but
will have a higher computational cost.
5. Estimator set: For each model, implement esti-
mator X
p
using (30). Tune λ to balance sensitivity
against adaptability to changing dynamics.
The following subsections apply this design frame-
work using the model form introduced in Section 2.1.
4.2 Specific Model Structure
The human hand and wrist contains 15 joints actu-
ated by over 20 muscles, however 42% of functional
movements involve only four fingers moving in uni-
son (Ingram et al., 2008). Furthermore, the spastic-
ity commonly experienced by stroke patients makes
the extensor muscles a critical target for rehabilitation
(American Stroke Association, 2022). Therefore, the
model used in this work contains l = 4 extrinsic mus-
cles of the hand, namely the extensor communis (EC),
Extensor carpi radialis brevis (ECRB), Extensor indi-
cis (EI), and Extensor carpi ulnaris (ECU). The wrist
and metacarpophalangeal (MCP) joints were actively
controlled, and are defined in Figure 6, resulting in
the output vector y(k,t) = [θ
1
(k,t),θ
2
(k,t)]
⊤
.
Stimulation was applied using a 6 × 4 element
electrode array (such as that used in (Freeman et al.,
2016)), giving a total of 24 elements. Preliminary
experiments revealed that all four muscles of inter-
est could be activated using only two electrode ele-
ments. The optimal location of these was determined
heuristically for each participant, and the pulse-width
Multiple Model Iterative Learning Control of FES Electrode Arrays
541
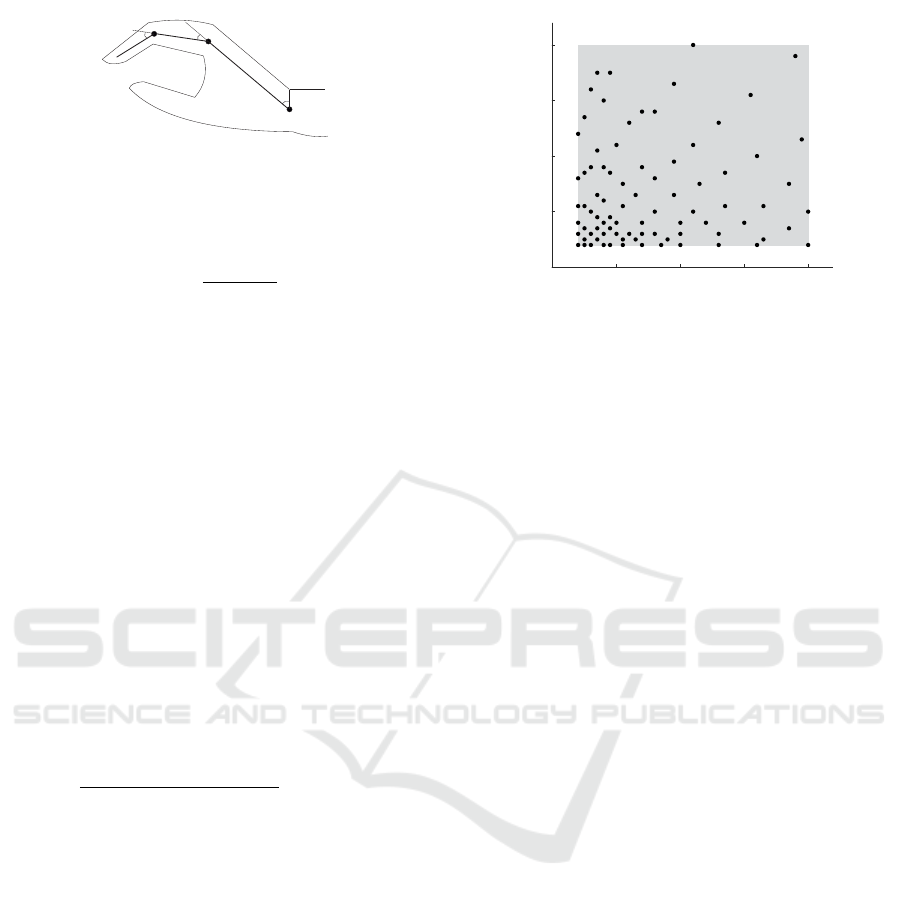
Finger
Thumb
Wrist
θ
2
θ
3
θ
1
Figure 6: Joint angle definitions.
applied to these elements was used as the input to the
system, giving n = q = 2.
The IRC form was chosen as
z
i
= a
1
e
a
2
v
i
− 1
e
a
2
v
i
+ a
3
. (32)
which has been been shown to accurately capture
muscle dynamics using only a small number of pa-
rameters a
1
-a
3
(Freeman et al., 2009). Similarly,
the LAD were modelled as a second order, critically
damped system with natural frequency ω
n
.
The forms of M(y), C(y, ˙y), and R(y) were equiva-
lent to those given in (Theodorou et al., 2011), whilst
gravity was integrated within K(y, ˙y). This then as-
sumed a simple linear friction form, in which each
joint is represented as a spring with stiffness k
i
, damp-
ing b
i
, and zero elongation at the initial position θ
0,i
:
K(y, ˙y) =
k
1
(θ
0,1
− θ
1
) + b
1
˙
θ
1
.
.
.
k
q
(θ
0,q
− θ
q
) + b
q
˙
θ
q
. (33)
The physiological constraints of the joint were mod-
elled by increasing joint stiffness k as the angle θ ap-
proaches a cutoff value θ
cuto f f
. This is expressed by
k
i
(θ
i
) =
0.1k
n,i
(θ
thres,i
− θ
cuto f f ,i
)
θ
i
− θ
cuto f f ,i
+ k
n,i
, i = 1,...,q
(34)
where k
n,i
is the nominal joint stiffness of joint i, and
θ
thres,i
the threshold angle at which the stiffness be-
gins to increase. Implementation was simplified by
selecting a large value of T
s
and setting N = 1. In this
context the output y(k) represents the steady-state re-
sponse to input u(k). This approach has been used
previously in (Sun and Freeman, 2024), and is appli-
cable to the FES rehabilitation setting, in which dy-
namics are slow and the overall shape of the trajectory
is more important than the movement speed.
4.3 EMMILC Design
After establishing the model structure, the next step is
to define the uncertainty space U. Preliminary exper-
iments revealed that parameters k
i
, θ
0,i
, and θ
cuto f f ,i
,
i = {1, 2} had the most impact on model performance,
however, θ
0,i
and θ
cuto f f ,i
could be easily measured
experimentally (see Section 5). The joint stiffness k
1
0 0.5 1 1.5 2
k1
0
0.5
1
1.5
2
k2
U
G
4
G
3
G
5
G
58
G
1
G
2
G
7
G
12
G
17
Figure 7: Model set distribution, with key models labelled.
and k
2
were therefore selected to define the uncer-
tainty space, with bounds k
1
,k
2
∈ [0.2,2] correspond-
ing to the range of values measured in (Park et al.,
2017). Preliminary experiments revealed that this was
a sufficient range to cover possible parameter varia-
tion.
The control design procedure K was selected as
linearisation-based gradient ILC, as given by (13),
(14), due to its favourable robustness properties.
Preliminary tests were carried out in which EM-
MILC design parameters were tuned heuristically to
give optimal values of γ = 10,000, ∆ = 0.0007, and
λ = 0.4. Parameter γ was selected to ensure robust
convergence within 15 iterations, whilst ∆ was se-
lected as a trade-off between minimising computation
time (mean of 3.7s per trial) and ensuring stability.
The resulting model set distribution is shown in Fig-
ure 7. The low λ value allowed the system to quickly
adapt to unforeseen changes in system dynamics.
5 EXPERIMENTAL TESTING
Extensive simulation was first undertaken using in-
silico data to demonstrate system feasibility. Results
are omitted for brevity but can be found online at
https://doi.org/10.5258/SOTON/D3186. Experimen-
tal tests were then carried out on four unimpaired par-
ticipants, following ethical approval from the Univer-
sity of Southampton (ERGO: FEPS 91636).
5.1 Method
Code was written in Matlab 2024a and deployed in
realtime onto a Raspberry Pi 3B. This provided PWM
outputs that were amplified using a 4-channel stim-
ulator (Odstock Medical Ltd, Salisbury UK), whilst
joint angles were recorded using a contactless motion-
capture sensor (Ultraleap Stereo IR 170). The setup
is shown in Figure 8.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
542
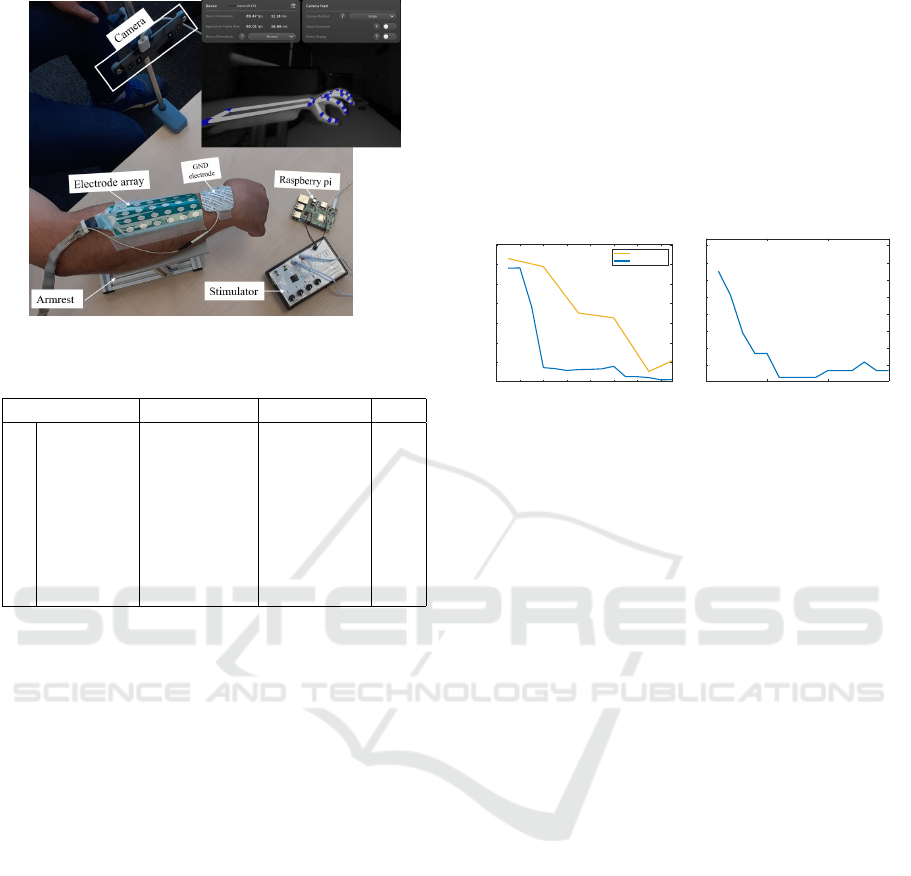
Figure 8: Experimental setup showing motion tracking.
Table 1: EMMILC and ID-based ILC performance.
Participant y
d
Error norm k
∗
1
ID-based [65.4,-9.8] 0.1065 13
EMMILC 0.0236 4
2
ID-based [79.9, -9.3] 0.3958 >24
EMMILC 0.1801 4
3
ID-based [80.2,-20.0] 0.2727 10
EMMILC 0.2304 2
4
ID-based [57.5, -7.7] 1.372 19
EMMILC 0.3141 2
For each participant a feasible reference was first
determined, as given in Table 1, corresponding to a
pointing posture. The values of θ
0
were recorded as
the resting joint angles, before the maximum stim-
ulation pulsewidth (300µs, in accordance with FES
safety protocols) was applied to both channels, with
the resulting angles giving θ
cuto f f
. These values were
then used to define the model.
The performance of EMMILC was compared to
the best existing electrode array control approach, in
which the ILC algorithm employs a linearised model
that is identified between trials using tests on the
physical patient (Sun and Freeman, 2024). Each iter-
ation of identification-based (ID-based) ILC requires
n + 1 tests (1 ILC update and n identification tests).
5.2 Results
Table 1 compares the performance of EMMILC to
that of ID-based ILC, in terms of the error norm af-
ter 15 tests, defined by
Error norm = ∥y
d
− y(15)∥
2
, (35)
and the number of iterations (denoted k
∗
) required for
the error to converge to 30% of its initial value.
This reveals that the average error norm over all
participants after 15 iterations is 65% lower when us-
ing EMMILC as compared with ID-based ILC, re-
quiring on average 13 fewer tests to converge.
Figure 9a gives an example of the convergence
of EMMILC and ID-based ILC for one participant,
demonstrating that EMMILC convergence requires
significantly fewer tests. EMMILC switching is
shown in Figure 9b, which reveals that the algorithm
quickly switches to a stabilising model and stays there
for the remaining trials. The key models that the sys-
tem switches to are shown in Figure 7.
0 2 4 6 8 10 12 14
Iterations
0.2
0.4
0.6
0.8
1
1.2
1.4
Error norm
ID-based ILC
EMMILC
(a) Error convergence
0 5 10 15
Iteration
10
20
30
40
50
60
70
80
Selected model
(b) EMMILC switching
Figure 9: Example performance for participant 1.
6 CONCLUSIONS AND FUTURE
WORK
This paper has presented a novel approach to the con-
trol of electrode arrays using multiple-model iterative
learning control. It first extended EMMILC for ap-
plication to nonlinear systems, and then developed
a transparent framework for the design of a suitable
model-set, estimator, and controller. It then demon-
strated the effectiveness of EMMILC in experiments
with unimpaired participants. These revealed that it
could reduce the average number of tests for con-
vergence by 13 compared to standard identification-
based ILC algorithms.
Areas for future work include carrying out experi-
mental tests on stroke patients, increasing the number
of inputs in order to activate a carefully-chosen subset
of electrodes, and improving EMMILC performance
by increasing the dimension of the uncertainty space.
REFERENCES
American Stroke Association (2022). Let’s talk about spas-
ticity after stroke.
Brend, O., Freeman, C., and French, M. (2015). Multiple-
model adaptive control of functional electrical stimu-
lation. IEEE Transactions on Control Systems Tech-
nology, 23(5):1901–1913.
Buchstaller, D. and French, M. (2016). Robust stabil-
ity for multiple model adaptive control: Part i—the
Multiple Model Iterative Learning Control of FES Electrode Arrays
543

framework. IEEE Transactions on Automatic Control,
61(3):677–692.
Feigin, V. L., Brainin, M., Norrving, B., Martins, S., Sacco,
R. L., Hacke, W., Fisher, M., Pandian, J., and Lindsay,
P. (2022). World stroke organization (wso): Global
stroke fact sheet 2022. International journal of stroke.
Feldman, A. G. and Latash, M. (2005). Testing hypotheses
and the advancement of science: recent attempts to
falsify the equilibrium point hypothesis. Brain Res,
145(91–103).
Freeman, C. and French, M. (2015). Estimation based mul-
tiple model iterative learning control. In 2015 54th
IEEE Conference on Decision and Control (CDC),
pages 6070–6075.
Freeman, C., Hughes, A.-M., Burridge, J., Chappell, P.,
Lewin, P., and Rogers, E. (2009). A model of the up-
per extremity using fes for stroke rehabilitation. Jour-
nal of biomechanical engineering, 131:031011.
Freeman, C., Yang, K., Tudor, J., and Kutlu, M.
(2016). Feedback control of electrical stimulation
electrode arrays. Medical Engineering and Physics,
38(11):1185–1194.
Freeman, C. T. (2014). Electrode array-based electrical
stimulation using ILC with restricted input subspace.
Control Engineering Practice, 23:32–43.
Freeman, C. T. (2016). Control System Design for
Electrical Stimulation in Upper Limb Rehabilitation.
Springer International Publishing. Springer Interna-
tional Publishing.
Georgiou, T. T. and Smith, M. C. (1997). Robustness anal-
ysis of nonlinear feedback systems: An input–output
approach. IEEE Transactions on Automatic Control,
42(9):1200–1221.
Hebb, D. O. (1949). Organization of Behavior. Psychology
Press.
Hughes, A.-M., Burridge, J., Demain, S., Ellis-Hill, C.,
Meagher, C., Tedesco Triccas, L., Turk, R., and
Swain, I. (2014). Translation of evidence-based as-
sistive technologies into stroke rehabilitation: Users’
perceptions of the barriers and opportunities. BMC
health services research, 14:124.
Ingram, J., Kording, K., Howard, I., and Wolpert, D. (2008).
The statistics of natural hand movements. Experimen-
tal brain research. Experimentelle Hirnforschung. Ex-
périmentation cérébrale, 188:223–36.
Kwakkel, G., Kollen, B. J., van der Grond, J., and Prevo, A.
J. H. (2003). Probability of regaining dexterity in the
flaccid upper limb: impact of severity of paresis and
time since onset in acute stroke. Stroke, 34 9:2181–6.
Le, F., Markovsky, I., Freeman, C. T., and Rogers, E.
(2010). Identification of electrically stimulated mus-
cle models of stroke patients. Control Engineering
Practice, 18(4):396–407.
Lin, T., Owens, D., and Hatonen, J. (2006). Newton
method based iterative learning control for discrete
non-linear systems. International Journal of Control,
79(10):1263–1276.
O’Dwyer, S., O’Keeffe, D., Coote, S., and Lyons, G.
(2006). An electrode configuration technique using
an electrode matrix arrangement for fes-based upper
arm rehabilitation systems. Medical Engineering &
Physics, 28(2):166–176.
Park, K., Chang, P.-H., and Kang, S. H. (2017). In vivo
estimation of human forearm and wrist dynamic prop-
erties. IEEE Transactions on Neural Systems and Re-
habilitation Engineering, 25(5):436–446.
Persson, H. c., Parziali, M., Danielsson, A., and Sunnerha-
gen, K. (2012). Outcome and upper extremity func-
tion within 72 hours after first occasion of stroke in
an unselected population at a stroke unit. a part of the
salgot study. BMC neurology, 12:162.
Salchow, C., Valtin, M., Seel, T., and Schauer, T. (2016). A
new semi-automatic approach to find suitable virtual
electrodes in arrays using an interpolation strategy.
European Journal of Translational Myology, 26(2).
Schill, O., Rupp, R., Pylatiuk, C., Schulz, S., and Reischl,
M. (2009). Automatic adaptation of a self-adhesive
multi-electrode array for active wrist joint stabiliza-
tion in tetraplegic sci individuals. In 2009 IEEE
Toronto International Conference Science and Tech-
nology for Humanity (TIC-STH), pages 708–713.
Stockley, R., Peel, R., Jarvis, K., and Connell, L. (2019).
Current therapy for the upper limb after stroke: a
cross-sectional survey of uk therapists. BMJ Open,
9(9).
Sun, X. and Freeman, C. T. (2024). Parameterised function
ILC with application to stroke rehabilitation. Control
Engineering Practice, 145.
Theodorou, E., Todorov, E., and Valero-Cuevas, F. J.
(2011). Neuromuscular stochastic optimal control
of a tendon driven index finger model. In Proceed-
ings of the 2011 American Control Conference, page
348–355. IEEE.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
544
