
Design and Implementation of a Stone Rotation Measurement System
with IMU Sensor and Stone Behavior Presentation System
Chen Guanyu
1 a
, Haruna Mori
1 b
, Yoshinari Takegawa
1 c
, Shimpei Aihara
2 d
and Fumito Masui
3 e
1
Graduate School of Systems Information Science, Future University Hakodate, Hokkaido, Japan
2
Department of Sport Science and Research, Japan Institute of Sport Sciences, Tokyo, Japan
3
Information Communication Group, Kitami Institute of Technology, Hokkaido, Japan
Keywords:
Curling, Visualization, Rotation Measurement.
Abstract:
In the strategic sport of curling, referred to as “chess on ice,” precise measurement and real-time presentation of
stone dynamics are critical for performance optimization. This study introduces a novel system that integrates
Inertial Measurement Units (IMUs) and real-time data processing to track and analyze the rotational dynamics
of curling stones accurately. Additionally, our system includes the Stone Behavior Presentation System, which
interactively displays real-time data on a tablet device, providing instant feedback to players and coaches.
This dual approach not only enhances the accuracy of data collection but also improves the immediacy and
applicability of the information for strategic decision-making in training and competitive environments.
1 BACKGROUND
Curling is a sport in which players slide stones on ice,
aiming to achieve a higher score than their opponents.
Curling is a strategic sport, also known as chess on
ice, and information sharing among players is essen-
tial. For example, it is no exaggeration to say that
who wins or loses a match is determined by how ac-
curately the behavior of a thrown stone, such as its
moving speed and rotation speed, can be collected.
Therefore, being able accurately and quickly to un-
derstand the ever-changing behavior of the stones is
one of the most important skills for curling players.
Takegawa et al. have developed a technique for es-
timating the position and moving speed of stones on
a curling sheet(Takegawa et al., 2023). Additionally,
curling requires precise control of a stone’s move-
ment on ice, where understanding its rotational dy-
namics is crucial for performance analysis and im-
provement(Maeno, 2014). Traditional methods for
measuring the rotation of a curling stone rely heavily
on manual observation and post-event video analysis,
a
https://orcid.org/0009-0007-8754-6979
b
https://orcid.org/0009-0001-6202-4150
c
https://orcid.org/0000-0003-1947-0021
d
https://orcid.org/0000-0002-8513-0204
e
https://orcid.org/0000-0001-9979-8734
which can be time-consuming and prone to inaccura-
cies. Particularly in the case of curling, players may
inadvertently obstruct the cameras, making it impos-
sible to accurately confirm the rotation through slow-
motion replay. Additionally, in post-event analysis,
frequent replays are necessary, so good visualization
is a valuable factor for efficient data interaction.
Accurate and real-time measurement of the curl-
ing stone’s rotation is imperative for coaches, play-
ers, and researchers to gain insights into the mechan-
ics of the sport. Such data is essential for optimizing
strategies, improving training methods, and advanc-
ing the scientific understanding of curling dynamics.
Moreover, real-time feedback during training sessions
can potentially enhance performance by allowing im-
mediate adjustments based on precise rotational data,
making this a worthwhile research consideration.
The primary objective of this study is to develop
a novel system that utilizes smart IMU sensors and
quaternion data to accurately measure and analyze the
rotational dynamics of a curling stone. Thus, we de-
velop “Tablet Stone,” a system that acquires real-time
stone behavior data (moving speed, rotation speed,
and rpm) and interactively displays the stone’s behav-
ior on a tablet device attached to the stone.
140
Guanyu, C., Mori, H., Takegawa, Y., Aihara, S. and Masui, F.
Design and Implementation of a Stone Rotation Measurement System with IMU Sensor and Stone Behavior Presentation System.
DOI: 10.5220/0012899700003828
In Proceedings of the 12th International Conference on Sport Sciences Research and Technology Support (icSPORTS 2024), pages 140-147
ISBN: 978-989-758-719-1; ISSN: 2184-3201
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
2 RELATED RESEARCH
2.1 Rotation Measurement
Previous studies (Barbour and Schmidt, 2001) have
explored various methods for tracking and analyzing
the movement of sports equipment, including the use
of video analysis and mechanical sensors. However,
these methods often fall short in terms of real-time
data acquisition and processing capabilities. Recent
advancements in Inertial Measurement Unit (IMU)
sensors have opened new possibilities for sports an-
alytics, providing high-resolution data on motion dy-
namics.
In particular, IMU sensors have been successfully
applied to real-time motion tracking in fields such
as biomechanics and robotics(Verdel et al., 2023).
The application of these sensors in curling, however,
remains relatively unexplored. This study aims to
bridge this gap by developing a system that leverages
smart IMU sensors to measure the rotational angle
and speed of a curling stone in real time, providing
immediate feedback and detailed post-analysis capa-
bilities.
2.2 Feedback Methods in Curling
There is, even now, no established theory regarding
what causes the stones to curve as they travel(Murata,
2022). Due to the complex and advanced element of
strategy and the fact that technique is dependent on
players, there are few scientific approaches to curling,
in comparison with other sports. Nevertheless, Masui
et al. have started research titled ‘Curling Science’,
which is an initiative to create new strategy support
that integrates information technology
1
. This project
involves research on digital curling(Ito and Kitasei,
2015), tactical analysis, measurement of stone be-
havior, and sweeping(Gwon et al., 2020; Won et al.,
2018). Digital curling refers to the proposal of a vir-
tual curling space, created using a computer’s physi-
cal simulator, that acts as a space to enable discussion
of curling strategy. This concept has been developed
by a large number of people(Yamamoto et al., 2015).
In addition, systems, such as the Portable Tactical
Support DB System, have been developed to record
information, e.g., shots, stone layout, match scores,
players taking part, and the condition of the ice, on a
tablet device (Masui et al., 2015; Masui et al., 2016;
Otani et al., 2016).
1
https://kaken.nii.ac.jp/en/grant/KAKENHI-
PROJECT-15H02797/
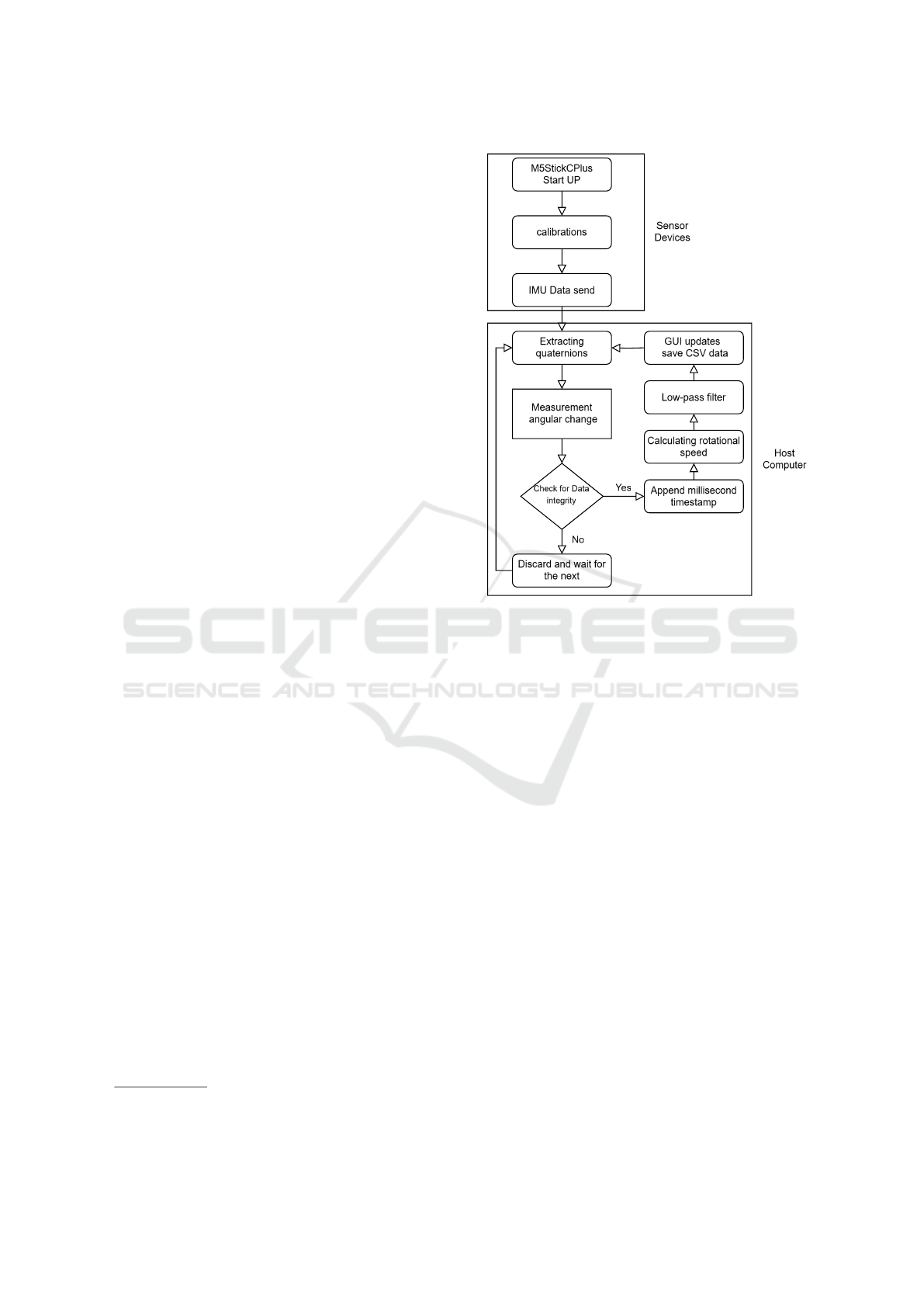
Figure 1: Work loop.
3 MEASUREMENT METHOD
3.1 System Proposal
3.1.1 System Overview
The proposed system utilizes the BNO055 IMU sen-
sor to monitor and analyze the rotational dynamics of
a curling stone in real-time. The sensor operates in
NDOF (Nine Degrees of Freedom) mode and trans-
mits data packets via UDP at approximately 9.2 Hz.
These packets include quaternions, raw accelerom-
eter, gyroscope, and magnetometer data. The host
computer, implemented using Python on a Surface
Pro 8, is responsible for receiving the quaternion data,
converting it to Euler angles, and calculating the ro-
tation angle and speed. A low-pass filter is applied
to the rotation speed data to reduce noise. The pro-
cessed data is displayed using a graphical user inter-
face (GUI) implemented with matplotlib and saved in
CSV format for post-experiment analysis. Figure 1 il-
lustrates the overall workflow of the system, detailing
the data flow and processing steps involved in real-
time monitoring and analysis.
Design and Implementation of a Stone Rotation Measurement System with IMU Sensor and Stone Behavior Presentation System
141
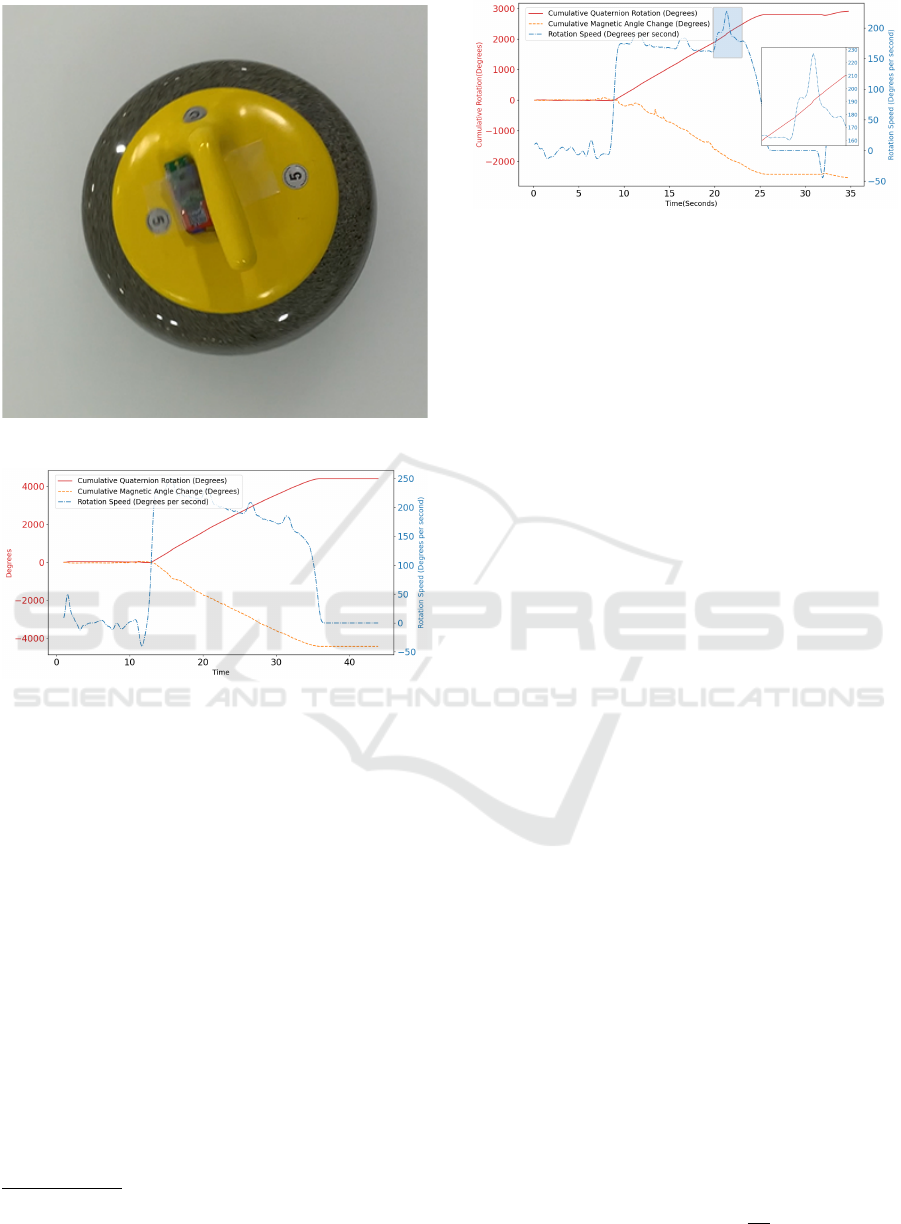
Figure 2: Sensor device.
Figure 3: Results and analysis.
3.1.2 Hardware Components
BNO055 Sensor. The BNO055, developed by
Bosch, is a high-precision IMU sensor integrating a
triaxial 14-bit accelerometer, a high-precision triaxial
16-bit gyroscope, and a triaxial geomagnetic sensor.
This advanced integration reduces size and complex-
ity while minimizing potential errors.
2
BME280 Sensor. The BME280 sensor collects
barometric pressure data, which can be used for fu-
ture research. This additional data can provide in-
sights into environmental conditions that might affect
the curling stone’s performance.
ESP32 M5StickC PLUS. This microcontroller
handles the data acquisition from both the BNO055
and BME280 sensors, with all components connected
via the I2C interface. The combined weight is mini-
2
Information from Bosch’s official documentation.
https://www.bosch-sensortec.com/products/smart-sensor-
systems/bno055/
Figure 4: Collision analysis.
mized to only 19.8g, reducing the impact on the curl-
ing stone.
3.1.3 Data Transmission
Data packets, including quaternions and sensor read-
ings, are sent from the ESP32 M5StickC PLUS to the
host computer using the UDP protocol. This ensures
minimal latency and efficient data transfer for real-
time processing.
3.1.4 Data Processing on the Host Computer
The host computer runs a Python-based program to
receive and process the data. Below is a detailed ex-
planation of the implementation steps:
Data Reception: A UDP socket is configured to lis-
ten for incoming data packets. The data is decoded
and parsed into individual sensor readings.
Quaternion to Euler Angle Conversion: Us-
ing the scipy.spatial.transform library, the received
quaternions are converted to Euler angles. This con-
version is crucial for calculating the rotation angle and
speed of the curling stone. Quaternions are used be-
cause they avoid the gimbal lock problem (Bernardes
and Viollet, 2022) that can occur with Euler angles,
providing a more stable representation of orientation.
Rotation Angle. The cumulative rotation angle is
computed from the Euler angles. The formula used
is:
Cumulative Rotation =
n
∑
i=1
(θ
i
− θ
i−1
) (1)
where θ represents the Euler angle around the z-axis.
The speed of rotation is calculated by differenti-
ating the Euler angles over time. The formula used
is:
Rotation Speed =
∆θ
∆t
(2)
icSPORTS 2024 - 12th International Conference on Sport Sciences Research and Technology Support
142

This measures how quickly the stone is rotating in de-
grees per second.
To reduce noise in the rotation speed data, a low-
pass filter is applied. The filter formula is as follows:
Filtered Speed = α ·Current Speed
Rotation Speed
+ (1 −α) · Previous Speed
Rotation Speed
(3)
where α is the filter coefficient that determines the
amount of smoothing.
Data Visualization. A real-time GUI is imple-
mented using Matplotlib to display the cumulative ro-
tation and rotation speed. The GUI updates at a fre-
quency of approximately 9 Hz, providing immediate
visual feedback.
In Figure 3, the red line represents the curling
stone’s rotational angle(degree), which can be seen
to increase as the stone rotates. The blue line in-
dicates the rotational speed(degree per second), and
the yellow line represents the raw magnetometer
data(rotational angle).
Data Storage. All processed data, including times-
tamps, cumulative rotation angles, and rotation
speeds, are saved to a CSV file for later analysis. This
ensures that detailed records of each experiment are
maintained.
By following these steps, the system can provide
accurate and real-time measurements of the curling
stone’s rotational dynamics, offering valuable insights
for both training and research purposes.
3.1.5 Post-Experiment Analysis
The post-experiment analysis involves processing the
recorded data from the experiments to gain insights
into the rotational dynamics of the curling stone. This
section details the steps taken to analyze the data, in-
cluding data cleaning, quaternion to Euler angle con-
version, rotation calculation, and visualization. Load-
ing Data: The recorded data is loaded from a CSV
file, which contains timestamps and sensor readings,
including quaternions and magnetometer data.
Timestamp Conversion. Timestamps are con-
verted to a proper time format and adjusted to rela-
tive time from the start of the experiment. This allows
for accurate calculation of time intervals between data
points.
Offset Calculation. For each timestamp, offsets are
calculated based on the number of data points to dy-
namically determine intervals. This helps in accu-
rately plotting the data over time.
Quaternion to Euler Angle Conversion: Using
the scipy.spatial.transform library, quaternions are
converted to Euler angles. This conversion is essen-
tial for calculating the rotation angles of the curling
stone.
Cumulative Rotation Changes. The changes in ro-
tation angles (yaw) are calculated and accumulated to
obtain the cumulative rotation over time.
Magnetic Angle Calculation. The changes in the
magnetic field angle are also calculated and accumu-
lated to provide additional insights into the stone’s ro-
tation dynamics.
Rotation Speed: The rotation speed is calculated
by dividing the rotation changes by the time inter-
vals. A Gaussian filter is applied to smooth the rota-
tion speed data.The alpha value of the low-pass filter
is adjusted during the post-experiment analysis to op-
timize the smoothness of the speed curves, ensuring
accurate representation of the curling stone’s dynam-
ics.
Visualization. The processed data is visualized us-
ing Matplotlib, displaying both cumulative rotation
and rotation speed over time. Annotations are added
to show total rotation in degrees and turns, as well as
cumulative magnetic angle changes.
3.2 Experiments
3.2.1 Equipment Setup and Procedure
To evaluate the feasibility and performance of the
prototype device, a series of experiments were con-
ducted. The lower unit, comprising the sensors and
M5StickC PLUS, was powered on, calibrated using a
figure-of-eight motion to ensure accurate orientation
tracking, and securely attached to the curling stone’s
top cover. Following this setup, the host computer’s
Python program was initiated to start data reception.
Throughout the experiments, a camera continuously
tracked and recorded the curling stone’s movements
to validate the data post-experiment. Various exper-
imental conditions were tested, including combina-
tions of low, medium, and high speeds, clockwise and
counterclockwise rotations, and collisions. The ob-
jective was to evaluate the prototype under different
scenarios.
Design and Implementation of a Stone Rotation Measurement System with IMU Sensor and Stone Behavior Presentation System
143

3.2.2 Data Collection and Initial Findings
During the experiments, data transmission, reception,
and parsing were successful. The angle calculation al-
gorithms performed correctly, and the GUI refreshed
as expected. Once the experiments were complete,
the data, including the computed and raw data, was
automatically saved.
3.2.3 Post-Experiment Analysis
The post-experiment analysis involved using the
saved raw data to recreate the experiments. Addition-
ally, the raw magnetometer data was used to verify
the results and mitigate potential errors from Micro-
Electro-Mechanical Systems (MEMS) algorithms.
3.2.4 Example and Observations
As illustrated in the accompanying Figure 2, a
medium-speed clockwise rotation experiment showed
that the curling stone’s rotational angle(degree), rep-
resented by a red line, increases as the stone rotates.
The blue line indicates the rotational speed(degree per
second), and the yellow line represents the raw mag-
netometer data(rotational angle). The smoothness of
the red line compared to the yellow line is evident,
highlighting the effectiveness of the data smoothing
process. The optimized UI from the post-experiment
analysis quickly displays the number of rotations and
specific degrees. The Matplotlib component allows
for zooming in on specific areas for detailed visual
analysis.
3.2.5 Additional Insights and Improvements
Interesting observations were made from the collision
data set, which is valuable for future collision detec-
tion functionality. In Figure 4, the rotational speed
showed an upward trend at the moment of collision
before decreasing, providing crucial information for
monitoring collisions. Additionally, the experiments
demonstrated the ability to distinguish between clock-
wise and counterclockwise rotations. As shown in
Figure 5, the positive and negative changes in rota-
tional magnitude correspond to clockwise and coun-
terclockwise rotations, respectively.
Furthermore, the experiments revealed several de-
sign improvement points for the prototype:
1. Increase Sampling Rate. Improving the sen-
sor sampling rate can provide more granular data,
leading to more precise analysis of the curling
stone’s rotational dynamics.
2. Enhance Program Stability. Ensuring the stabil-
ity of the Python software is crucial for long-term
Figure 5: clockwise and counterclockwise rotations.
experiments. This can be achieved by implement-
ing better error handling and optimizing the code.
3. Implement Asynchronous and Multithreaded
Processing. Utilizing asynchronous and multi-
threaded processing can reduce CPU load and im-
prove the system’s real-time capabilities. This
enhancement will enable smoother and more ef-
ficient data handling, especially during high-
frequency data acquisition.
4. Improve Real-Time Visualization. Enhancing
the real-time visualization capabilities of the sys-
tem can provide immediate feedback to users.
This can be achieved by optimizing the GUI and
ensuring that it can handle high-frequency data
updates without lag.
5. Ensure Reliable Wireless Network Support.
Reliable wireless network support is essential to
maintain data transmission integrity, especially
during high-frequency updates.
6. Reduce Power Consumption. The cold envi-
ronment of the curling rink affects battery perfor-
mance. Reducing unnecessary power consump-
tion can extend battery life, ensuring longer oper-
ational periods during experiments.
4 TABLET STONE
The Tablet Stone is intended for players who have
competed in the All-Japan University Curling Cham-
pionships, or a higher-level competition, and is in-
tended to be used during practice, such as when prac-
tising delivery and sweeping. The requirements for
the development of the Tablet Stone are listed below.
1. Since the players are concentrating on delivery
and sweeping, it is appropriate to present infor-
mation on the behavior of the stones in the vicin-
ity where the players are looking.
2. Since the throwers and sweepers comprise differ-
ent numbers of people, who also assume differ-
ent postures and require different information, the
icSPORTS 2024 - 12th International Conference on Sport Sciences Research and Technology Support
144
IMU sensor
Thrower-oriented
presentation method
Pressure sensor
Tablet
Sweeper-oriented
presentation method
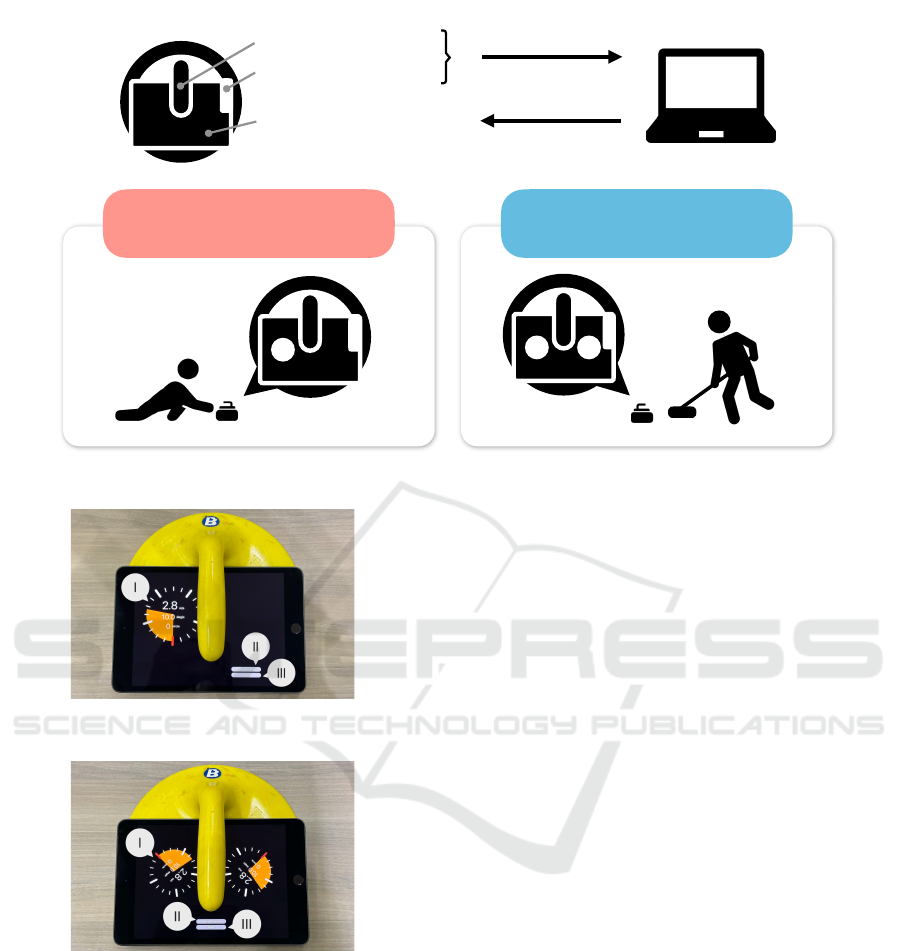
Figure 6: System configuration.
Figure 7: Examples of thrower-oriented presentation
method.
Figure 8: Examples of sweeper-oriented presentation
method.
information presentation method must take these
factors into account. In particular, the sweepers
need to view information from a display on a ro-
tating stone, and it is necessary to consider a pre-
sentation method that is not affected by the rota-
tion of the stone.
The system configuration of the proposed Tablet
Stone is shown in Figure 6. Tablet Stone displays the
stone’s behavior in real-time on the screen of an on-
board tablet device. The sensor data from the IMU
sensor mounted on the tablet and the data from the
pressure sensor mounted under the handle are con-
verted into moving speed, rotation speed, and rpm on
a server located outside the curling sheet. These data
are sent to the tablet and displayed. Data between de-
vices is sent and received via UDP communication.
The tablet was developed as an iOS application using
SwiftUI on an iPad mini.
We propose two presentation methods, one for
throwers and the other for sweepers. The pressure
sensor mounted on the stone’s handle is used to switch
between the two presentation methods. Each presen-
tation method is described in detail in subsections 4.1
and 4.2.
4.1 Thrower-Oriented Presentation
Method
The thrower-oriented presentation method is used in
situations where the thrower is holding the stone han-
dle and delivering the stone. The appearance of
the thrower-oriented presentation method is shown in
Figure 7. The posture of the throwers is low, and the
handle itself and the hand holding the handle obstruct
the display. These factors were taken into considera-
tion when deciding the placement of the presentation
content and the size of the text. Figure 7-(I) is a me-
ter that displays the stone’s behavior in real-time. The
values are, from the top, the moving speed and the ro-
tation angle. The moving speed is also indicated by an
orange circle meter. The maximum value of the cir-
cle meter is 10.0 m/s, which makes it easy to visually
understand how fast the stone is sliding. The rotation
angle is displayed to confirm that the slide is straight.
Design and Implementation of a Stone Rotation Measurement System with IMU Sensor and Stone Behavior Presentation System
145
meter
meter
meter
meter
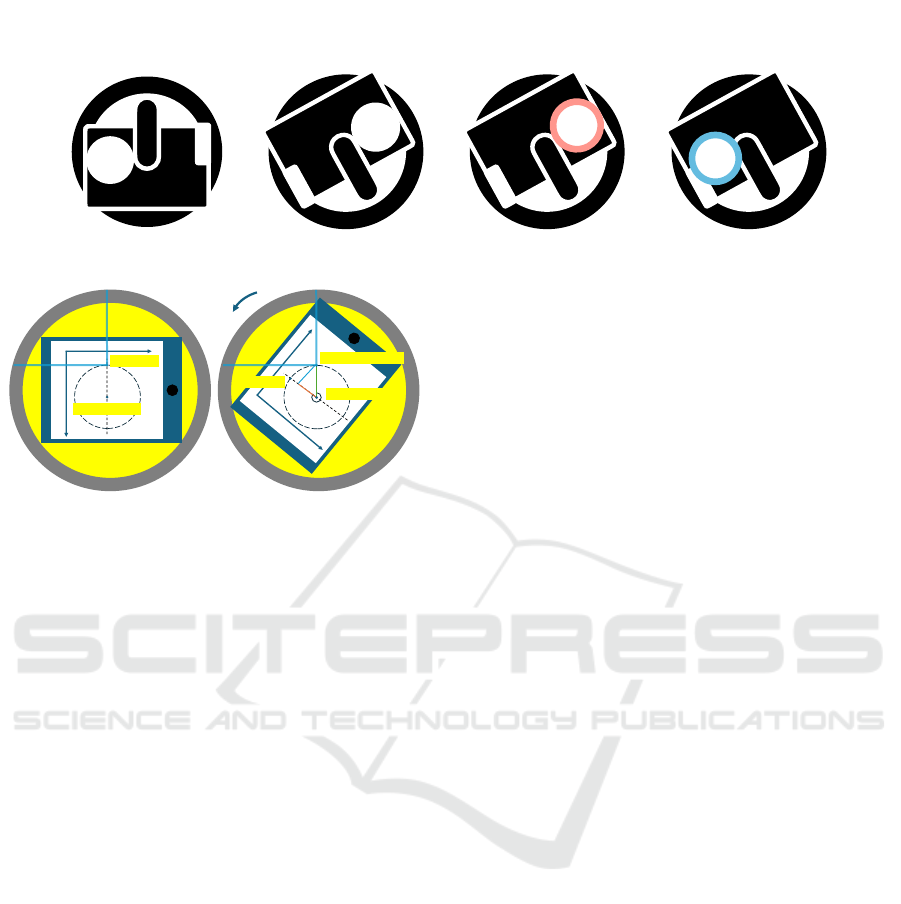
Figure 9: Examples of meter rotation direction fixation function and meter absolute position fixation function.
x
y
D
fix
(Var X, VarY)
x
y
r
θ
D
Δt
(Var X, VarY)
r*sin(-
θ
)
r*cos(-
θ
)
C
(CenterX, CenterY)
C
(CenterX, CenterY)
D
fix
(MeasureX, MeasureY)
Figure 10: Example of meter absolute position fixation
function.
Figure 7-(II) is a button to start UDP communication.
Figure 7-(III) is a button to reset the orientation of the
meter. After resetting, the meter faces the thrower’s
side.
4.2 Sweeper-Oriented Presentation
Method
The sweeper-oriented presentation method is used in
the situation where a stone has been thrown and the
sweepers are sweeping the stone. The sweepers are
in pairs and are positioned on either side of the stone
as shown in Figure 8. The same information as in the
thrower-oriented presentation method is displayed on
the meter. Specifically, Figure 8-(I) is a meter that
displays the stone’s behavior in real-time. The values
are, from the top, moving speed, rotation speed, and
rpm. The moving speed is the same as that in the
thrower-oriented presentation method. The rotation
speed is displayed to allow the user to check how fast
the stone is rotating. Rpm is displayed to allow the
user to check how many rpm have been made. Figure
8-(II) is a button to start UDP communication. Figure
8-(III) is a button to reset the orientation of the meter.
After resetting, the meter will face the sweepers on
the left and right, respectively.
For the sweeper-oriented presentation method, we
propose a Meter Rotation Direction Fixation Function
and a Meter Absolute Position Fixation Function in
order to maintain readability of the meter when the
stone is rotating.
4.2.1 Meter Rotation Direction Fixation
Function
The assumed initial position of the stone is as in Fig-
ure 9-A. When the stone rotates, the meter seen by the
player also rotates (Figure 9-B), resulting in poor vis-
ibility of the meter. The meter rotation direction fixa-
tion function estimates the rotation angle of the stone
from the rotation angle of the IMU sensor mounted
on the tablet and rotates the meter in the opposite di-
rection, as shown in Figure 9-C.
4.2.2 Meter Absolute Position Fixation Function
Even if the Meter Rotation Direction Fixation Func-
tion is applied, the meter will appear in front of the
handle or behind the handle depending on the rotation
of the stone, as shown in Figure 9-C. By applying the
Meter Absolute Position Fixation Function, the posi-
tion on the stone where the meter is displayed is fixed
regardless of the rotation of the stone, as shown in
Figure 9-D.
This function fixes the absolute position of the
displayed meter by rotating the meter by θ degrees
with respect to the center point. An illustration of
the function is shown in Figure 10. The left fig-
ure shows the initial state without rotation, and the
right figure shows the state with rotation. In the ini-
tial state without rotation, the coordinates of the ref-
erence position are D
f ix
(VarX, VarY ) and the cen-
ter coordinates of the stone are C(CenterX, CenterY ).
With rotation, D
∆t
(VarX, VarY ) denotes the coordi-
nates of the reference position, C(CenterX, CenterY)
denotes the coordinates of the center of the stone, and
D
f ix
(MeasureX, MeasureY ) denotes the coordinates
of the position drawn after rotation by θ degrees. Let
r be the distance from C to D
f ix
. θ is the angle con-
verted from the rotation angle of the built-in sensor to
radians. The formulas for MeasureX and MeasureY
are described below.
MeasureX = CenterX + r × sin(−θ) (4)
MeasureY = CenterY − r × cos(−θ) (5)
icSPORTS 2024 - 12th International Conference on Sport Sciences Research and Technology Support
146

5 CONCLUSION
The developed system, featuring advanced IMU sen-
sors and robust data processing techniques, represents
a significant breakthrough in the real-time analysis of
curling stone dynamics. This system not only mea-
sures rotational dynamics accurately, but also fea-
tures the innovative Stone Behavior Presentation Sys-
tem, which displays real-time data interactively on a
tablet device. This dual functionality enhances train-
ing effectiveness and strategic decision-making for
both coaches and players.
Future enhancements will focus on increasing the
sampling rate, improving system stability, and ex-
panding real-time processing capabilities, ensuring
the system remains cutting-edge. As for verification,
we plan to verify if the tablets affect the trajectory of
the stones and the players, and to test the two pro-
posed methods to see if they affect the training effec-
tiveness. Additionally, we plan to refine the Stone Be-
havior Presentation System to offer more customized
and user-friendly interfaces that can adapt dynami-
cally to different game scenarios and user preferences.
Through these advancements, our system promises to
revolutionize training methods and strategic planning
in the sport of curling.
ACKNOWLEDGEMENTS
This work was supported by the “The Enhancement of
HPSC Infrastructure through Technology Innovation
Project” of Japan Sports Agency.
REFERENCES
Barbour, N. and Schmidt, G. (2001). Inertial sensor tech-
nology trends. IEEE Sensors Journal, 1(4):332–339.
Bernardes, E. and Viollet, S. (2022). Quaternion to euler
angles conversion: A direct, general and computation-
ally efficient method. PLoS One, 17(11):e0276302.
Gwon, J., Kim, H., Bae, H., and Lee, S. (2020). Path plan-
ning of a sweeping robot based on path estimation of
a curling stone using sensor fusion. Electronics, 9(3).
Ito, T. and Kitasei, Y. (2015). Proposal and implementa-
tion of ”digital curling”. In 2015 IEEE Conference on
Computational Intelligence and Games (CIG), pages
469–473.
Maeno, N. (2014). Dynamics and curl ratio of a curling
stone. Sports Engineering, 17:33–41. Published: 30
July 2013, Issue Date: March 2014.
Masui, F., Hirata, K., Otani, H., Yanagi, H., and Ptaszynski,
M. (2016). Informatics to support tactics and strate-
gies in curling. International Journal of Automation
Technology, 10(2):244–252.
Masui, F., Ueno, H., Yanagi, H., and Ptaszynski, M. (2015).
Toward curling informatics — digital scorebook de-
velopment and game information analysis. In 2015
IEEE Conference on Computational Intelligence and
Games (CIG), pages 481–488.
Murata, J. (2022). Study of curling mechanism by preci-
sion kinematic measurements of curling stone’s mo-
tion. Scientific Reports, 12(1).
Otani, H., Masui, F., Hirata, K., Yanagi, H., and Ptaszyn-
ski, M. (2016). Analysis of curling team strategy
and tactics using curling informatics. In Correia,
P. P. and Cabri, J., editors, icSPORTS, pages 182–187.
SciTePress.
Takegawa, Y., Sasaki, N., Aihara, S., and Masui, F. (2023).
Development of a curling stone tracking system using
infrared leds, and an accompanying application. In
Proceedings of the 11th International Conference on
Sport Sciences Research and Technology Support (ic-
Sports 2023), pages 136–143.
Verdel, N., Mohorcic, M., Drobnic, M., Supej, M., and De-
polli, M. (2023). Time synchronization in wireless
imu sensors for accurate gait analysis during running.
In 2023 IEEE International Workshop on Sport, Tech-
nology and Research (STAR), pages 126–129.
Won, D.-O., Kim, B.-D., Kim, H.-J., Eom, T.-S., Muller,
K.-R., and Lee, S.-W. (2018). Curly: An ai-based
curling robot successfully competing in the olympic
discipline of curling. In Proceedings of the Twenty-
Seventh International Joint Conference on Artificial
Intelligence, IJCAI-18, pages 5883–5885. Interna-
tional Joint Conferences on Artificial Intelligence Or-
ganization.
Yamamoto, M., Kato, S., and Iizuka, H. (2015). Digital
curling strategy based on game tree search. In 2015
IEEE Conference on Computational Intelligence and
Games (CIG), pages 474–480.
Design and Implementation of a Stone Rotation Measurement System with IMU Sensor and Stone Behavior Presentation System
147
