
A Decentralized Guaranteed Collision Avoidance Control Framework for
Multi-Vehicle Systems in Highly Constrained Spaces
Erick J. Rodr
´
ıguez-Seda
a
Department of Weapons, Robotics, and Control Engineering,
United States Naval Academy, Annapolis, MD, U.S.A.
Keywords:
Artificial Potential Field, Collision Avoidance, Multi-Agent Systems, Unmanned Vehicles.
Abstract:
Collision avoidance methods based on artificial potential field functions generally assume vehicles and ob-
stacles to have circular or elliptical shapes, which hinders mobility through narrow and cluttered spaces. To
counteract this problem, this paper presents a decentralized, cooperative control framework for vehicles of
unicycle type that considers the non-circular shape and relative orientation of vehicles and obstacles, increas-
ing their maneuverability through tight spaces. The control framework proposes the use of a continuously
differentiable time-varying minimum safe distance that agents need to enforce based on their shape and rel-
ative orientation and modulates the avoidance maneuvers and reaction forces based on the collision threat,
increasing the reaction forces when the vehicles are fast approaching and relaxing the forces when they are
moving away. The resulting closed-form control inputs are continuously smooth and bounded and are rigor-
ously proven to guarantee collision avoidance at all times.
1 INTRODUCTION
Nowadays, unmanned vehicles operate in complex
and dynamic environments such as disaster relief
zones, border control, and warehouses, to name a few.
Oftentimes, they need to navigate through highly con-
strained zones while sharing the space with other ve-
hicles and obstacles. The latter tends to compromise
mobility in lieu of safety (Xiao et al., 2021). There-
fore, it is mission-critical to design control algorithms
that allow these vehicles to have higher mobility and
performance while maintaining safety.
1.1 Related Work
Collision avoidance control algorithms for unmanned
vehicles have been studied for decades (Hoy et al.,
2014; Raibail et al., 2022). They typically lie in one of
two categories: motion planning and reactive control.
Motion planning methods can lead to optimal trajec-
tories, but their implementation is mostly centralized,
demanding information from all other agents, or re-
quires an accurate model of the environment (Hoy
et al., 2014). Real-time reactive collision avoidance
methods, on the other hand, can be decentralized and
respond to unexpected obstacles, making these strate-
a
https://orcid.org/0000-0003-1108-4329
gies more suitable for unknown and dynamic spaces.
A popular branch among real-time reactive con-
trol methods is the use of artificial potential field
(APF) functions (Khatib, 1986). APF-based methods
allow one to build provably safe collision avoidance
control laws that can not only guarantee safety but can
be implemented in a decentralized way and for an ar-
bitrarily large number of vehicles (Stipanovi
´
c et al.,
2007). Recent examples of decentralized methods for
multi-vehicle systems include (Du et al., 2019; Mel-
chiorre et al., 2022; Gao et al., 2024). Yet, most APF-
based approaches rely on the conservative assump-
tion that agents, that is, vehicles and obstacles, are
of circular or elliptical shape, or a collection of them
(Stipanovi
´
c et al., 2007; Braquet and Bakolas, 2022).
This worst-case scenario assumption simplifies the
analysis at the expense of making the agents occupy a
larger space. For instance, consider the two vehicles
of rectangular shape in Figure 1. The circular body as-
sumption will require both vehicles to keep a distance
from each other equal to or larger than the summa-
tion of their circumradii, r
max
i j
= h
i
+ h
j
, regardless of
their relative orientation. Instead, one could take their
shape and orientation into consideration and reduce
the distance, r
i j
, that agents need to keep from each
other, as shown in Figure 1. A recent APF-based ap-
proach that takes into consideration their orientation
and shape is presented in (Rodr
´
ıguez-Seda, 2024b).
Rodríguez-Seda, E. J.
A Decentralized Guaranteed Collision Avoidance Control Framework for Multi-Vehicle Systems in Highly Constrained Spaces.
DOI: 10.5220/0012900300003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 1, pages 229-236
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
229

z
i,2
y
i
z
j,2
∆
i j
R
i j
r
i j
φ
i
θ
i j
r
max
i j
R
h
j
z
i,1
z
j,1
x
i
Figure 1: Minimum safe distance. Traditional approaches
assume vehicles to have circular shapes and enforce a con-
stant minimum distance equal to or greater than the sum of
their circumradii r
max
i j
= h
i
+ h
j
.
Another common drawback of most APF-based
methods is the equal treatment of obstacles that are
moving away and those approaching. This is due to
the sole reliance on relative position among agents
while ignoring the direction of motion or velocity.
Recent research efforts that integrate relative velocity
information into the APF formulation include (Zhang
et al., 2020; Ginesi et al., 2021). These approaches,
however, require the obstacle’s velocity, which might
not be available or difficult to estimate. As an alter-
native, the work in (Rodr
´
ıguez-Seda and Stipanovi
´
c,
2020; Rodr
´
ıguez-Seda, 2024a) proposes an APF-
based framework that only uses the vehicle’s velocity
information and not the obstacle’s, relaxing the APF
force if the vehicle is moving away from the obstacle
and increasing it if the vehicle is moving closer to it.
1.2 Contributions
This paper builds on (Rodr
´
ıguez-Seda and Stipanovi
´
c,
2020) and (Rodr
´
ıguez-Seda, 2024b) to propose a de-
centralized, cooperative APF-based control law for
nonholonomic vehicles of unicycle type that guaran-
tees collision avoidance at all times while increas-
ing maneuverability through dynamic and highly clut-
tered spaces. The proposed control law takes into
consideration the shape and relative orientation of
vehicles and obstacles to yield non-circular, tighter
avoidance zones. In contrast to other collision avoid-
ance methods for non-circular obstacles (Zimmer-
mann et al., 2022), the proposed framework yields
closed-form controllers that generate smooth and con-
tinuous forces and torques. Furthermore, the vehi-
cle’s avoidance response is modulated based on the
collision threat: it increases or decreases the repul-
sive force and activation distance if the vehicle is ap-
proaching the obstacle or moving away. To demon-
strate the performance of the control framework, a
simulation example is presented and compared with
the use of constant avoidance and reaction zones.
2 PROBLEM
2.1 Multi-Vehicle System Dynamics
Consider a group of N nonholonomic vehicles of uni-
cycle type with dynamic equations governed by
˙x
i
(t) = v
i
(t)cosφ
i
(t), m
i
˙v
i
(t) = f
i
(t)
˙y
i
(t) = v
i
(t)sinφ
i
(t), J
i
˙
ω
i
(t) = τ
i
(t)
˙
φ
i
(t) = ω
i
(t),
(1)
where x
i
(t) and y
i
(t) are the position coordinates,
φ
i
(t) is the orientation, v
i
(t) and ω
i
(t) are the linear
and angular velocities, m
i
is the mass, J
i
is the iner-
tia, and f
i
(t) and τ
i
(t) are the control force and torque
inputs for the ith robot (see Figure 1). The control
objective is to design
1
f
i
and τ
i
such that the ith ve-
hicle follows a desired path while avoiding collisions
with other vehicles and obstacles. Unfortunately, it
is well known that the position and orientation of (1)
cannot be simultaneously stabilized at a desired value
using a continuous static state feedback control law
(Brockett, 1983). Therefore, this paper proposes the
use of input-output feedback linearization, where the
control task shifts to regulating the position of a ref-
erence point in front of (x
i
,y
i
) given by
z
i,1
=x
i
+ L
i
cosφ
i
, z
i,2
=y
i
+ L
i
sinφ
i
(2)
where L
i
> 0 is a constant parameter and z
i
=
[z
i,1
,z
i,2
]
T
are the Cartesian coordinates of the refer-
ence point. Now, differentiating twice equation (2)
and applying the following control force and torque
f
i
τ
i
=
cosφ
i
m
i
sinφ
i
m
i
−sinφ
i
J
i
L
i
cosφ
i
J
i
L
i
×
u
i,1
+ v
i
ω
i
sinφ
i
+ L
i
ω
2
i
cosφ
i
u
i,2
−v
i
ω
i
cosφ
i
+ L
i
ω
2
i
sinφ
i
(3)
one can show that (1) reduces to
¨
z
i
=u
i
(4a)
˙
φ
i
=L
−1
i
−sinφ
i
L
i
cosφ
i
L
i
˙
z
i
(4b)
where u
i
= [u
i,1
,u
i,2
]
T
is the new control input for the
linearized system. While the internal dynamics (4b)
1
In what follows, the time argument of signals will be
omitted unless it is deemed necessary.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
230

can only be shown to be Lagrange stable (Rodr
´
ıguez-
Seda et al., 2014), the linear dynamics of the reference
point (4a) are controllable. That is, for a any desired
position z
d
i
∈R
2
, one can design a state feedback con-
trol law u
i
such that z
i
→ z
d
i
as t → ∞.
2.2 Problem Formulation
The main control objective is to design a decen-
tralized cooperative control framework that guaran-
tees the safe navigation of multiple vehicles through
highly constrained spaces. To this end, consider the
interaction of a pair of agents ith and jth, as illustrated
in Figure 1. Note that the minimum safe distance (or
envelope) between the agents, denoted as r
i j
, is not
only a function of their shapes and dimensions but
also of their relative position and orientations
r
i j
:= r
i j
(z
i
−z
j
,φ
i
,φ
j
) = r
ji
(z
j
−z
i
,φ
j
,φ
i
). (5)
That is, r
i j
depends on how the jth agent or obstacle
is positioned with respect to the ith vehicle. One then
says that a collision takes place if
z
i
−z
j
≤ r
i j
for
some time t. In what follows, it is assumed that one
can find an envelop function r
i j
that is continuously
differentiable with bounded derivative. Finally, it is
assumed that the vehicles can detect, either via com-
munication or onboard sensors, the relative position
and orientation of other agents within a bounded de-
tection radius R > sup
i, j̸=i
{r
i j
} = r
max
i j
.
Having defined the minimum safe distance and the
detection radius, one can formulate the control objec-
tive as follows. Design a control strategy u
i
such that
z
i
→ z
d
i
as t → ∞ and
z
i
−z
j
> r
i j
∀ i, j ̸= i,t ≥ 0,
where z
d
i
is the desired final position.
3 CONTROL FRAMEWORK
3.1 Collision Avoidance Control
To achieve the control objective, this paper proposes
the use of the following control law
u
i
= K
p
(z
d
i
−z
i
) −K
v
˙
z
i
+ u
a
i
(6)
where K
v
and K
p
are positive constants and u
a
i
is the
collision avoidance control input given by
u
a
i
= −
∑
j∈N
i
∂V
T
i j
∂z
i
+
∂V
0
i j
∂r
i j
∂r
i j
∂z
i
T
+
1
L
i
∂V
0
i j
∂r
i j
∂r
i j
∂φ
i
−sin φ
i
cosφ
i
!
(7)
The group N
i
= {j ∈ {1,··· , N}/i,
z
i
−z
j
≤ R} is
the set of neighbors of the ith agent and V
i j
and V
0
i j
are
avoidance functions (Stipanovi
´
c et al., 2007) given by
V
i j
:=V
i j
(z
i
,z
j
,r
i j
,R
i j
)=
min
(
0,
z
i
−z
j
2
−R
2
i j
z
i
−z
j
2
−r
2
i j
)!
2
V
0
i j
:= V
i j
(z
i
,z
j
,r
i j
,R
0
i j
). (8)
The reaction radius R
i j
represents the distance at
which the ith vehicle starts avoiding the jth agent.
Ideally, this radius should be larger if the ith vehi-
cle is approaching the jth agent at a large speed and
smaller if it is moving away. Therefore, similar to
(Rodr
´
ıguez-Seda and Stipanovi
´
c, 2020), this paper
proposes the use of
R
i j
:=R
i j
(λ
i j
) = r
i j
+ ∆
i j
(λ
i j
) (9a)
∆
i j
:=∆
i j
(λ
i j
) =
¯
∆
1
2
+
tan
−1
(αλ
i j
+ σ)
π
(9b)
where ∆
i j
denotes the reaction gap distance (i.e., the
distance at which the ith vehicle starts reacting to ob-
stacles), 0 <
¯
∆ ≤ R −sup
i, j
{r
max
i j
} defines the maxi-
mum reaction gap distance, α and σ are two control
parameters, and λ
i j
= (z
i
−z
j
)
T
˙
z
i
represents the rate
at which the ith vehicle either increases (λ
i j
> 0) or
decreases (λ
i j
< 0) its distance to the jth agent. Note
that ∆
i j
→ 0, R
i j
→ r
i j
if λ
i j
→ −∞ (i.e., if the ith
vehicle is rapidly distancing itself from the jth agent)
and ∆
i j
→
¯
∆, R
i j
→ r
i j
+
¯
∆ if λ
i j
→ −∞ (i.e., if the
vehicle is fast approaching). The radius
R
0
i j
=: R
i j
(0) = r
i j
+
1
2
¯
∆ +
1
π
¯
∆ tan
−1
(σ) (10)
denotes the reaction radius when λ
i j
= 0. Note that
R
0
i j
≡R
0
ji
, yet R
i j
and R
i j
are, in general, not the same.
Similarly, R
i j
̸≡ R
ik
for j ̸= k.
Now, returning to (7) one can show that
∂V
T
i j
∂z
i
=
4(R
i j
−r
i j
))(
z
i
−z
j
2
−R
2
i j
)(z
i
−z
j
)
(
z
i
−z
j
2
−r
2
i j
)
3
∂V
i j
∂r
i j
=
4∆
i j
(R
2
i j
−
z
i
−z
j
2
)(R
i j
r
i j
+
z
i
−z
j
2
)
(
z
i
−z
j
2
−r
2
i j
)
3
if r
i j
<
z
i
−z
j
≤ R
i j
, undefined if
z
i
−z
j
= r
i j
,
and zero otherwise. Similarly, one can show that
∂V
i j
∂z
i
=
∂V
ji
∂z
i
,
∂V
i j
∂z
i
= −
∂V
i j
∂z
j
,
∂V
i j
∂r
i j
=
∂V
ji
∂r
i j
. (11)
Theorem 1. Consider the system in (1) with con-
trol law (3) and (6). Assume that z
d
i
is constant
and that
z
i
(0) −z
j
(0)
> r
i j
∀ i, j ̸= i. Then,
z
i
(t) −z
j
(t)
> r
i j
∀ t ≥ 0.
Proof. Consider the following Lyapunov function
W =
1
2
N
∑
i=1
K
p
z
d
i
−z
i
2
+
∥
˙
z
i
∥
2
+
N
∑
i=1
∑
j∈N
i
V
0
i j
!
. (12)
A Decentralized Guaranteed Collision Avoidance Control Framework for Multi-Vehicle Systems in Highly Constrained Spaces
231

Differentiating (12) with respect to time yields
˙
W =
N
∑
i=1
−K
p
(z
d
i
−z
i
)
T
˙
z
i
+ (K
p
(z
d
i
−z
i
) −K
v
˙
z
i
)
T
˙
z
i
−
N
∑
i=1
∑
j∈N
i
∂V
T
i j
∂z
i
+
∂V
0
i j
∂r
i j
∂r
i j
∂z
i
T
+
1
L
i
∂V
0
i j
∂r
i j
∂r
i j
∂φ
i
−sin φ
i
cosφ
i
!
T
˙
z
i
+
1
2
N
∑
i=1
∑
j∈N
i
∂V
0
i j
∂z
i
˙
z
i
+
∂V
0
i j
∂r
i j
∂r
i j
∂z
i
˙
z
i
+
∂V
0
i j
∂r
i j
∂r
i j
∂φ
i
˙
φ
i
!
+
1
2
N
∑
i=1
∑
j∈N
i
∂V
0
i j
∂z
j
˙
z
j
+
∂V
0
i j
∂r
i j
∂r
i j
∂z
j
˙
z
j
+
∂V
0
i j
∂r
i j
∂r
i j
∂φ
j
˙
φ
j
!
(13)
Now, canceling the first two terms and noting that
N
∑
i=1
∑
j∈N
i
∂V
0
i j
∂z
i
˙
z
i
+
∂V
0
i j
∂r
i j
∂r
i j
∂z
i
˙
z
i
+
∂V
0
i j
∂r
i j
∂r
i j
∂φ
i
˙
z
i
!
=
1
2
N
∑
i=1
∑
j∈N
i
∂V
0
i j
∂z
i
˙
z
i
+
∂V
0
i j
∂r
i j
∂r
i j
∂z
i
˙
z
i
+
∂V
0
i j
∂r
i j
∂r
i j
∂φ
i
˙
φ
i
+
∂V
0
i j
∂z
j
˙
z
j
+
∂V
0
i j
∂r
i j
∂r
i j
∂z
j
˙
z
j
+
∂V
0
i j
∂r
i j
∂r
i j
∂φ
j
˙
φ
j
!
(14)
along with
˙
φ
i
=
1
L
i
[−sinφ
i
,cosφ
i
]
˙
z
i
, yields
˙
W = −K
v
N
∑
i=1
∥
˙
z
i
∥
2
−
N
∑
i=1
∑
j∈N
i
∂V
i j
∂z
i
−
∂V
0
i j
∂z
i
!
˙
z
i
≤−
N
∑
i=1
∑
j∈N
i
Λ
i j
λ
i j
(15)
where
Λ
i j
=4
(R
2
i j
−r
2
)(
x
i
−x
j
2
−R
2
i j
)
(
x
i
−x
j
2
−r
2
)
3
−4
(R
2
0
−r
2
)(
x
i
−x
j
2
−R
2
0
)
(
x
i
−x
j
2
−r
2
)
3
. (16)
Note that if λ
i j
≥ 0, then R
i j
≤ R
0
, which implies
that Λ
i j
≥ 0 and, hence Λ
i j
λ
i j
≥ 0. Similarly, if
λ
i j
< 0, then R
i j
> R
0
⇒Λ
i j
< 0 ⇒Λ
i j
λ
i j
> 0. There-
fore,
˙
W ≤ 0 for all t ≥ 0. The latter implies that
W (t) is non-increasing and bounded ∀ t ≥ 0. Now,
suppose that for some pair i, j ̸= i one have that
z
i
(t) −z
j
(t)
→r
i j
for some t > 0. The latter would
imply that W (t) → ∞, which is a contradiction. Since
the solutions of (4a) are continuous, one must have
that
z
i
(t) −z
j
(t)
̸→ r
i j
for all i, j ∈ N
i
,t > 0 and
the proof is complete.
Theorem 1 guarantees that if all agents start at a
safe distance from each other, they will remain at a
safe distance for all time. Note that it does not say
anything about convergence to the agents’ desired po-
sitions. Results on convergence are given next.
Theorem 2. Assume that z
d
i
is constant and that
z
i
(0) −z
j
(0)
> r
i j
∀ i, j ̸= i. Then, z
i
−z
d
i
,
˙
z
i
and
˙
φ
i
are uniformly ultimately bounded (UUB). Further-
more, if ∃T
0
such that u
a
i
= 0 ∀t ≥T
0
, then z
i
−z
d
i
,
˙
z
i
and
˙
φ
i
vanish exponentially as t → ∞.
Proof. From Theorem 1 one have that W is bounded,
which implies that V
i j
and V
0
i j
are also bounded ∀ i, j ̸=
i,t ≥ 0. Boundedness of V
i j
and V
0
i j
, along with
the fact that r
i j
is continuously differentiable with
bounded derivative by construction, implies that ∃¯u <
∞ such that u
a
i
≤ ¯u ∀ i,t ≥ 0. Now, let e
i
= z
d
i
−z
i
,
˙
e
i
= −
˙
z
i
, and
¨
e
i
= −
¨
z
i
= −K
p
e
i
−K
v
˙
e
i
−u
a
i
be the
tracking error, velocities, and accelerations, and con-
sider the following Lyapunov candidate function
W =K
p
∥
e
i
∥
2
+
1
2
∥
˙
e
i
∥
2
+
1
2
∥
˙
e
i
−K
v
e
i
∥
2
. (17)
Taking the time derivative of W yields
˙
W =2K
p
e
T
i
˙
e
i
+
˙
e
T
i
¨
e
i
+ (
˙
e
i
+ K
v
e
i
)
T
(
¨
e
i
+ K
v
˙
e
i
)
= −K
v
∥
˙
e
i
∥
2
−K
p
K
v
∥
e
i
∥
2
−2
˙
e
T
i
u
a
i
−K
v
e
T
i
u
a
i
≤−aK
v
[e
i
,
˙
e
i
]
T
2
+ b ¯u
[e
i
,
˙
e
i
]
T
(18)
where a = min{1,K
p
} and b = max{2,K
v
}. Since
W < 0 for all
[e
i
,
˙
e
i
]
T
> b ¯u/(aK
v
), one can con-
clude that [e
i
,
˙
e
i
]
T
is UUB (Khalil, 2002), and from
(4b), that
˙
φ
i
is also UUB.
Now, assume that ∃T
0
such that u
a
i
= 0 ∀ t ≥ T
0
.
Then,
˙
W ≤−aK
v
[e
i
,
˙
e
i
]
T
2
∀t ≥T
0
from which one
can conclude that [e
i
,
˙
e
i
]
T
converges asymptotically to
zero. The latter implies that
˙
φ
I
→ 0 as t → 0.
The theoretical results presented so far guarantee
collision avoidance when the desired position is con-
stant and when all agents apply the same control (or
remain static). A natural extension is the use of way-
points to drive the vehicles through a desired path or
trajectory. Additionally, the results presented so far
cannot guarantee the convergence of the tracking er-
ror to zero in all scenarios, i.e., agents may find them-
selves trapped in a deadlock. The next section will
discuss implementing way-points in the control law
and avoiding deadlocks.
3.2 Way-Points and Deadlocks
A main drawback of decentralized APF methods is
the occurrence of deadlocks (Melchiorre et al., 2022).
A vehicle is said to reach a deadlock if it can not
reach the desired position due to a persistent interac-
tion with another agent or obstacle. This is oftentimes
the result of symmetries between the attractive poten-
tial forces (i.e., the first term in (6)) and the avoidance
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
232

control (Rodr
´
ıguez-Seda et al., 2016). That is, when
u
a
i
→ K
p
(z
i
−z
d
i
). To break these symmetries, one
can temporarily change the desired position along a
vector that is perpendicular to the avoidance control.
Consider an ordered sequence of unobstructed M
i
way-points, z
k
i
∈{z
1
i
,··· ,z
M
i
i
}, in the ith vehicle’s de-
sired path separated by at least a distance D
i
> 0 of
each other. The idea is to go to the next way-point
z
k+1
i
whenever the distance of the vehicle to the kth
way-point is smaller than some positive parameter
d
i
≪D
i
. Since the agents’ velocities are bounded, the
times between switches are lower bounded by some
positive constant τ
i
> 0. The latter is a necessary con-
dition for stability and avoidance of Zeno behavior.
Now, due to the presence of obstacles and other
agents, the ith vehicle may not reach the kth way-
point and may end up circulating around it for an in-
definite time. To escape the deadlock, the vehicle may
temporarily switch to a new way-point,
˜
z
k
i
. The new
way-point can be chosen in a direction that is perpen-
dicular to the avoidance control, i.e.,
˜
z
k
i
= z
i
+ µ
i
R (π/2)u
a
i
, if
u
a
+ K
p
(z
i
−z
k
i
)
≤U
i
(19)
where µ
i
is a non-zero constant parameter, U
i
> 0 is
a small constant, and R (π/2) is the 2 ×2 rotational
matrix that rotates u
a
i
by π/2 radians. This tempo-
rary way-point can last for a pre-determined amount
of time T
i
in order to avoid multiple switching in a
short time frame. After T
i
, the vehicle may go back
to the original way-point z
k
i
or switch to another way-
point using (19) if the conflict has not been resolved.
The complete algorithm is given in Algorithm 1.
4 EXAMPLES
This section presents examples of vehicles of rectan-
gular shape with rectangular and circular obstacles.
4.1 Minimum Safe Distance
Let the shape of the ith vehicle be approximated by a
rectangle of length ℓ
i
and width w
i
. Similarly, let the
jth vehicle or obstacle be approximated by a rectangle
of length ℓ
j
and width w
j
. Without loss of generality,
let their lengths be aligned with the x-axis (i.e., when
φ
i
= 0) and define the following functions
β
i j
=
ℓ
i
2
+
ℓ
j
2
q
ε
2
+ cos
2
˜
φ
i j
+
w
j
2
q
ε
2
+ sin
2
˜
φ
i j
(20a)
γ
i j
=
w
i
2
+
ℓ
j
2
q
ε
2
+ sin
2
˜
φ
i j
+
w
j
2
q
ε
2
+ cos
2
˜
φ
i j
(20b)
where ε > 0 is a small constant such that the deriva-
tives of (20) are well-defined and
˜
φ
i j
= φ
i
−φ
j
is the
Algorithm 1: Way-Point Selection.
Constants: d
i
,U
i
,K
p
,µ
i
,T
i
,M
i
Input: k,z
i
,u
a
i
,z
k
i
,z
k+1
i
Output: z
d
i
,k
if k < M
i
and
z
i
−z
k
i
< d
i
:
z
d
i
← z
k+1
i
/* Pick Next Way-Point */
k ← k + 1
else if
z
i
−z
k
i
≥ d
i
and
u
a
i
+ K
p
(z
i
−z
k
i
)
≤U
i
:
˜
z
k
i
← z
i
+ µ
i
R (π/2)u
a
i
t
⋆
←t
while t ≤t
⋆
+ T
i
do
z
d
i
←
˜
z
k
i
/* Switch temporarily */
else:
z
d
i
← z
k
i
r
i j
r
i j
r
max
i j
r
max
i j
Figure 2: Comparison of the minimum safe distance be-
tween the proposed control framework (in red) and the tra-
ditional circular assumption (in blue). The left figure illus-
trates the case when the vehicle and obstacle have a rect-
angular shape. The right figure depicts the case when the
obstacle has a circular shape.
relative orientation. Let θ
i j
= atan2(z
j,2
−z
i,2
,z
j,1
−
z
i,1
) be the angle between z
i
and z
j
. Then, the equa-
tion for a rectangle with sides β
i j
and γ
i j
in polar co-
ordinates ρ
i j
and θ
i j
, rotated by φ
i
and centered at z
i
can be approximated by
ζ
i j
=
q
ε
2
+(γ
i j
cos(θ
i j
−φ
i
) + β
i j
sin(θ
i j
−φ
i
))
2
(21a)
η
i j
=
q
ε
2
+(γ
i j
cos(θ
i j
−φ
i
) −β
i j
sin(θ
i j
−φ
i
))
2
(21b)
ρ
i j
=
2β
i j
γ
i j
ζ
i j
+ η
i j
−2ε
. (21c)
Following the same procedure for the jth agent
and using the continuous differentiable approxima-
tion of the minimum function (Stipanovi
´
c et al.,
2012), one can obtain a smooth approximation of r
i j
r
i j
= r
ji
=(2)
1
δ
ρ
−δ
i j
+ ρ
−δ
ji
−
1
δ
, δ ≥ 2 (22)
that is continuously differentiable and bounded.
Choosing smaller ε →0 and larger δ →∞ yields more
compact envelopes. The left side of Figure 2 illus-
trates r
i j
for different relative positions between two
rectangular agents of different sizes and different ori-
A Decentralized Guaranteed Collision Avoidance Control Framework for Multi-Vehicle Systems in Highly Constrained Spaces
233
−15
−12 −9
−6
−3 0 3
6
9 12
15
−9
−6
−3
0
3
6
9
t = 0.0 s
z
k
1
z
d
1
(t)
z
k
2
z
d
2
(t)
z
k
3
z
d
3
(t)
z
k
4
z
d
4
(t)
x (m)
y (m)
Figure 3: Simulated scenario with four vehicles and several
static obstacles represented as squares and circles.
entations. The red-dotted line represents the mini-
mum safe distance that the center of the jth agent can
come from the ith vehicle, which is generally shorter
than the constant minimum distance scenario.
The case of an obstacle of circular shape can be
similarly addressed. Consider an obstacle with radius
h
j
. The rectangle obtained by moving the circular ob-
stacle around the vehicle as seen in Figure 2 has half-
length ℓ
i j
=
1
2
ℓ
i
+ h
j
and half-width w
i j
=
1
2
w
i
+ h
j
.
Then, similar to (21), one can define this rectangle in
polar coordinates r
i j
and θ
i j
= atan2(z
j,2
−z
i,2
,z
j,1
−
z
i,1
), where r
i j
is given by
q
i j
=
q
ε
2
+(w
i j
cos(θ
i j
−φ
i
) + ℓ
i j
sin(θ
i j
−φ
i
))
2
(23a)
s
i j
=
q
ε
2
+(w
i j
cos(θ
i j
−φ
i
) −ℓ
i j
sin(θ
i j
−φ
i
))
2
(23b)
r
i j
=r
ji
=
2w
i j
ℓ
i j
q
i j
+ s
i j
−2ε
. (23c)
Figure 2 illustrates r
i j
for different relative orienta-
tions between the ith vehicle and the jth agent.
4.2 Simulations
Consider a group of four identical vehicles (1) of
rectangular shape, with length ℓ
i
= 2 m and width
w
i
= 1 m, traveling through a highly obstructed en-
vironment, as shown in Figure 3. Each vehicle is
tasked with following a series of way-points by im-
plementing (6) and Algorithm 1. The system and con-
trol parameters are given as m
i
= 1 Kg, J
i
= 1 Kg m
2
,
K
p
= 1 N/m, K
v
= 2 Ns/m, L
i
= 2/3 m, D
i
= 1.5 m,
U
i
= 0.2 N, and µ
i
= 2
√
2 N,
¯
∆ = 4 m, α = 0.4,
σ = −0.3, δ = 6, and ε = 0.05. The static obsta-
cles are assumed to be squares of side ℓ
j
= w
j
= 5 m,
while circular obstacles have radius h
j
= 1.5 m.
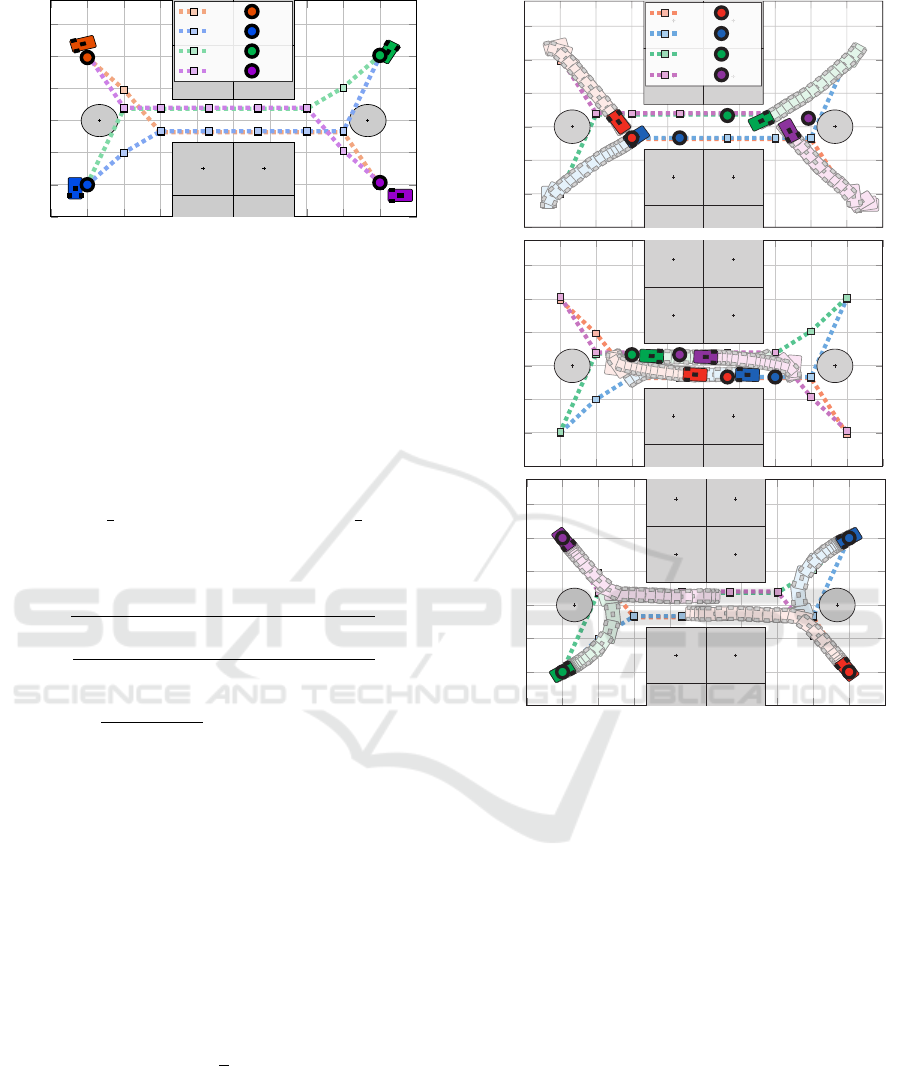
The response of the multi-vehicle system is given
in Figure 4. The vehicles are able to follow the way-
points and navigate smoothly through the narrow cor-
ridor while avoiding collisions and deadlocks, despite
−9
−6
−3
0
3
6
9
t ∈ [0.0s,7.0s]
z
k
1
z
d
1
(t)
z
k
2
z
d
2
(t)
z
k
3
z
d
3
(t)
z
k
4
z
d
4
(t)
y (m)
−9
−6
−3
0
3
6
9
t ∈ [7.0s,15.0s]
y (m)
−15
−12 −9
−6
−3 0 3
6
9 12
15
−9
−6
−3
0
3
6
9
t ∈ [15.0s,26.0s]
x (m)
y (m)
Figure 4: Sequential motion of the multi-vehicle system un-
der proposed avoidance control. Newer positions are over-
imposed and time-spaced by 0.5 s.
having symmetric desired paths with obstacles in their
way. Note also that the leading vehicles, 2nd and 3rd,
are able to avoid the last circular obstacles in their
paths while being closely followed by another agent.
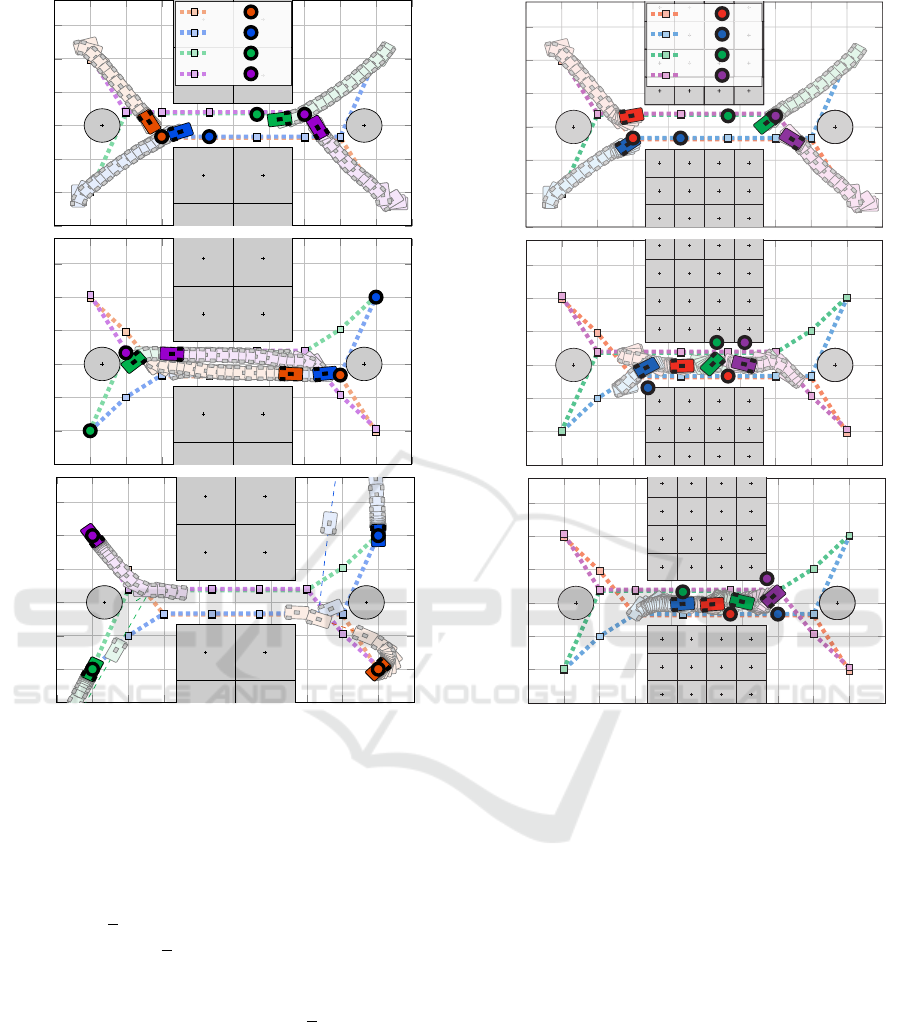
For comparison, the vehicles are also simulated
using the proposed control law (7) but with a con-
stant reaction gap distance of ∆
i j
= ∆
i j
(0) = 0.41 m.
This approach is equivalent to the one proposed in
(Rodr
´
ıguez-Seda, 2024b). The results are presented
in Figure 5. Note that, for the first 15 s, the vehicles’
response is very similar to the previous case. How-
ever, once the vehicles reach the last obstacles and
are encircled by another vehicle closely behind, the
second and third vehicles experience a forceful reac-
tion that leads them outside of the plotted area. This is
due to the smaller reaction gap, which requires more
drastic maneuvers in order to avoid collisions.
Finally, the multi-vehicle system is also simulated
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
234
−9
−6
−3
0
3
6
9
t ∈ [0.0s,7.0s]
z
k
1
z
d
1
(t)
z
k
2
z
d
2
(t)
z
k
3
z
d
3
(t)
z
k
4
z
d
4
(t)
y (m)
−9
−6
−3
0
3
6
9
t ∈ [7.0s,14.8s]
y (m)
−15
−12 −9
−6
−3 0 3
6
9 12
15
−9
−6
−3
0
3
6
9
t ∈ [14.8s,26.0s]
x (m)
y (m)
Figure 5: Sequential motion of the multi-vehicle system
with constant detection gap distance. Newer positions are
over-imposed and time-spaced by 0.5 s.
using a constant minimum safe distance radius and a
constant reaction gap distance of ∆
i j
= 0.41 m. When
avoiding other vehicles, the minimum safe distance is
chosen as the sum of their circumradii, i.e., r
i j
= r
ji
=
h
i
+ h
j
= 2
√
2 m. For circular obstacles, it is chosen
as r
i j
= h
i
+ h
j
=
√
2 + 1.5 m. All other obstacles are
divided into smaller 2.5 ×2.5 m
2
squares to allow the
transit of vehicles over the narrow corridor. For these
obstacles, r
i j
is chosen as r
i j
= 2.25
√
2 m. Note that,
since r
i j
is constant, the avoidance control reduces to
u
a
i
= −
∑
j∈N
i
∂V
0
i j
/∂z
i
, which is the traditional APF
approach. The results are illustrated in Figure 6. Note
that the vehicles are able to enter the narrow corridor,
where they reach a deadlock. The z
d
i
=
˜
z
k
i
points out-
side the desired path illustrate how the vehicles try to
evade the deadlock but are unsuccessful.
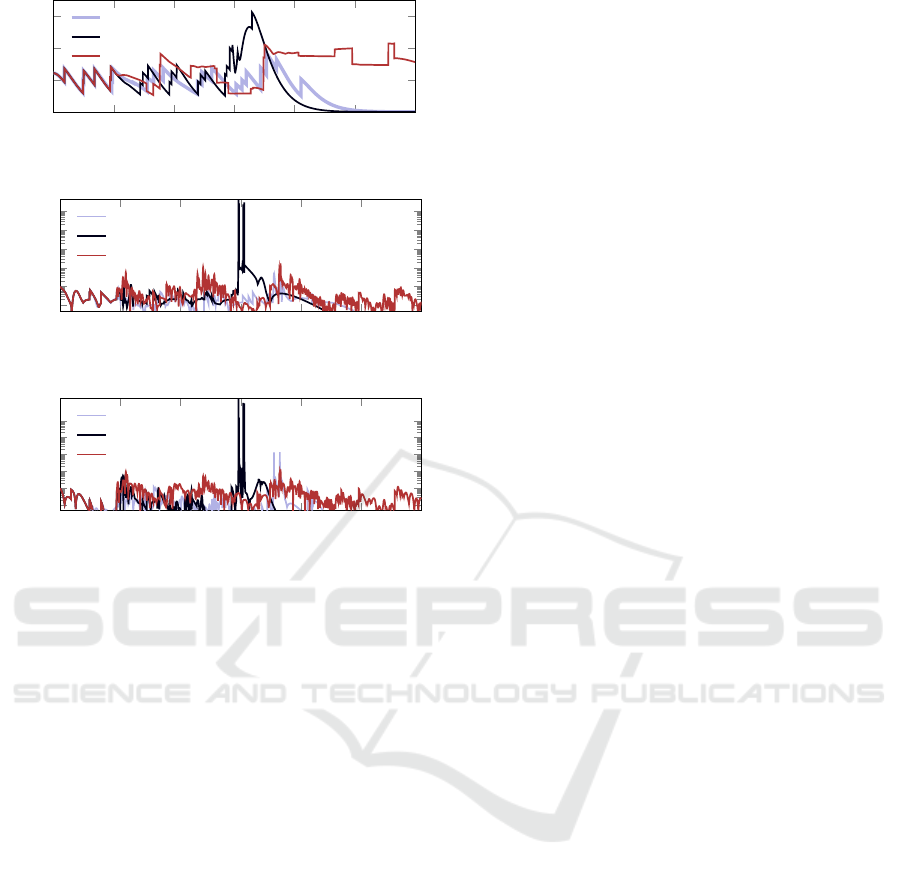
Figures 7, 8, and 9 show the cumulative instan-
taneous error, force, and torque for the case of the
−9
−6
−3
0
3
6
9
t ∈ [0.0s,7.0s]
z
k
1
z
d
1
(t)
z
k
2
z
d
2
(t)
z
k
3
z
d
3
(t)
z
k
4
z
d
4
(t)
y (m)
−9
−6
−3
0
3
6
9
t ∈ [7.0s,15.0s]
y (m)
−15
−12 −9
−6
−3 0 3
6
9 12
15
−9
−6
−3
0
3
6
9
t ∈ [15.0s,26.0s]
x (m)
y (m)
Figure 6: Sequential motion of the multi-vehicle system
with constant minimum safe distance and constant reaction
gap distance.
proposed controller (Proposed Control), the case of a
constant reaction gap (Constant ∆
i j
), and for the case
of a constant minimum safe distance and reaction gap
(Constant r
i j
and ∆
i j
). Note that errors are, in gen-
eral, smaller for the proposed avoidance control. Sim-
ilarly, note that the forces and torques are, in general,
one and four orders in magnitude larger for the use of
constant reaction gaps.
5 CONCLUSIONS
This paper presented a decentralized, cooperative,
APF-based control framework for multi-vehicle sys-
tems of unicycle type that is rigorously proven to
guarantee collision avoidance for an arbitrarily large
number of agents at all times. The control framework
defines a continuously differentiable time-varying
A Decentralized Guaranteed Collision Avoidance Control Framework for Multi-Vehicle Systems in Highly Constrained Spaces
235
0
5
10
15
20
25
30
0
10
20
30
t (s)
∑
N
i=1
||z
i
−z
d
i
|| (m)
Proposed Control
Constant ∆
i j
Constant r
i j
& ∆
i j
Figure 7: Cumulative tracking error.
0
5
10
15
20
25
30
10
0
10
1
10
2
10
3
10
4
10
5
t (s)
∑
N
i=1
||f
i
|| (m)
Proposed Control
Constant ∆
i j
Constant r
i j
& ∆
i j
Figure 8: Cumulative linear force (in logarithm scale).
0
5
10
15
20
25
30
10
0
10
1
10
2
10
3
10
4
10
5
t (s)
∑
N
i=1
||τ
i
|| (m)
Proposed Control
Constant ∆
i j
Constant r
i j
& ∆
i j
Figure 9: Cumulative torque (in logarithm scale).
minimum safe distance that agents need to enforce,
taking into consideration the shape and orientation
of vehicles and obstacles and, therefore, reducing
the conservatism introduced by traditional APF-based
methods. Furthermore, the framework modulates the
avoidance maneuvers and reaction forces based on
the collision threat level that obstacles might repre-
sent. The synthesis of both approaches is a contin-
uously smooth and bounded control force provided
in analytical closed-form. Simulation results demon-
strated that the proposed avoidance control can in-
crease the maneuverability of vehicles through highly
constrained spaces when compared to the use of con-
stant minimum safe distance and reaction radii.
REFERENCES
Braquet, M. and Bakolas, E. (2022). Vector field-based
collision avoidance for moving obstacles with time-
varying elliptical shape. In Proc. AACC MECC, pages
587–592.
Brockett, R. W. (1983). Asymptotic stability and feedback
stabilization. In Brockett, R. W., Millman, R. S., and
Sussmann, H. J., editors, Differential Geometric Con-
trol Theory, pages 181–191. Birkhauser, Boston.
Du, Y., Zhang, X., and Nie, Z. (2019). A real-time colli-
sion avoidance strategy in dynamic airspace based on
dynamic artificial potential field algorithm. IEEE Ac-
cess, 7:169469–169479.
Gao, Y., Li, D., et al. (2024). Trajectory planning and
tracking control of autonomous vehicles based on im-
proved artificial potential field. IEEE Trans. Veh.
Technol., pages 1–16.
Ginesi, M., Meli, D., et al. (2021). Dynamic movement
primitives: Volumetric obstacle avoidance using dy-
namic potential functions. J. Intell. Robot. Syst.,
101:1–20.
Hoy, M., Matveev, A. S., and Savkin, A. V. (2014). Algo-
rithms for collision-free navigation of mobile robots in
complex cluttered environments: A survey. Robotica,
33(3):463–497.
Khalil, H. K. (2002). Nonlinear Systems. Prentice Hall,
New Jersey.
Khatib, O. (1986). Real-time obstacle avoidance for manip-
ulators and mobile robots. Int. J. Robot. Res., 5(1):90–
98.
Melchiorre, M., Scimmi, L. S., et al. (2022). Robot collision
avoidance based on artificial potential field with local
attractors. In Proc. ICINCO, pages 340–350.
Raibail, M., Rahman, A. H. A., et al. (2022). Decentralized
multi-robot collision avoidance: A systematic review
from 2015 to 2021. Symmetry, 14(3).
Rodr
´
ıguez-Seda, E. J. (2024a). Decentralized low-energy
avoidance control framework for multiple mobile
agents using irregular observations. IEEE Trans. Con-
trol Syst. Technol., 32(3):1027–1039.
Rodr
´
ıguez-Seda, E. J. (2024b). Reactive collision avoid-
ance control for nonholonomic vehicles and obstacles
of arbitrary shape. ASME. Letters Dyn. Sys. Control,
4(3):031005.
Rodr
´
ıguez-Seda, E. J., Stipanovi
´
c, D. M., and Spong,
M. W. (2016). Guaranteed collision avoidance for
autonomous systems with acceleration constraints
and sensing uncertainties. J. Optim. Theory Appl.,
168(3):1014–1038.
Rodr
´
ıguez-Seda, E. J. and Stipanovi
´
c, D. M. (2020). Coop-
erative avoidance control with velocity-based detec-
tion regions. IEEE Control Syst. Lett., 4(2):432–437.
Rodr
´
ıguez-Seda, E. J., Tang, C., et al. (2014). Trajec-
tory tracking with collision avoidance for nonholo-
nomic vehicles with acceleration constraints and lim-
ited sensing. Int. J. Robot. Res., 33(12):1569–1592.
Stipanovi
´
c, D. M., Hokayem, P. F., et al. (2007). Coopera-
tive avoidance control for multiagent systems. J. Dyn.
Syst. Meas. Control, 129:699–707.
Stipanovi
´
c, D. M., Tomlin, C. J., and Leitmann, G. (2012).
Monotone approximations of minimum and maxi-
mum functions and multi-objective problems. Appl.
Math. Optim., 66(3):455–473.
Xiao, X., Liu, B., et al. (2021). Toward agile maneuvers in
highly constrained spaces: Learning from hallucina-
tion. IEEE Rob. Autom. Lett., 6(2):1503–1510.
Zhang, W., Rodr
´
ıguez-Seda, E. J., et al. (2020). Avoid-
ance control with relative velocity information for la-
grangian dynamics. J. Intell. Robot. Syst., 99:229–
244.
Zimmermann, S., Busenhart, M., et al. (2022). Differen-
tiable collision avoidance using collision primitives.
In Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst.,
pages 8086–8093.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
236
