
MLN-Subdue: Substructure Discovery In Homogeneous Multilayer
Networks
Anish Rai, Anamitra Roy, Abhishek Santra and Sharma Chakravarthy
Computer Science and Engineering Department and Information Technology Laboratory (IT Lab),
The University of Texas at Arlington, Arlington, Texas 76019, U.S.A.
{anish.rai, axr9563, abhishek.santra}@mavs.uta.edu, sharmac@cse.uta.edu
Keywords:
Multilayer Networks, Substructure Discovery, Decoupling Approach, Map/Reduce Architecture.
Abstract:
Substructure discovery is a well-researched problem for graphs (both simple and attributed) for knowledge dis-
covery. Recently, multilayer networks (or MLNs) have been shown to be better suited for modeling complex
datasets that have multiple entity and relationship types. However, the MLN representation brings new chal-
lenges in finding substructures due to the presence of layers, and substructure discovery methods for MLNs
are currently not available.
This paper proposes a substructure discovery algorithm for homogeneous MLNs using the decoupling ap-
proach. In HoMLNs, each layer has same or a common subset of nodes but different intralayer connectivity.
This algorithm has been implemented using the Map/Reduce framework to handle arbitrarily large layers and
to improve the response time through distributed and parallel processing. In the decoupled approach, each
layer is processed independently (without using any information from other layers) and in parallel and the
substructures generated from each layer are combined after each iteration to generate substructures that span
layers. The focus is on the correctness of the algorithm and resource utilization based on the number of layers.
The proposed algorithm is validated through extensive experimental analysis on large real-world and synthetic
graphs with diverse graph characteristics.
1 MOTIVATION
Mining has been traditionally performed on transac-
tional data whether it is clustering, classification, or
identifying frequent itemsets. For applications where
there is an inherent relationship, graphs offer better
representation for the modeling of data. As a result,
mining techniques were extended to graph models.
Graphs can also be used to model relationships among
multiple object types and relationships in a variety of
applications such as chemical compounds, virus prop-
agation, electrical and road transportation networks,
web analysis, etc. In particular, with graph models
where each vertex corresponds to an entity and each
edge corresponds to a relationship between two enti-
ties, the problem of finding frequent patterns becomes
one of discovering subgraphs that occur frequently or
compress the graph or forest better.
Substructure discovery (Cook and Holder, 1993)
was developed as a main memory algorithm for graph
models when data sizes were not very large. However,
with the advent of social networks and the Internet,
graph sizes have grown significantly, necessitating al-
ternative approaches to substructure discovery.
Why Multilayer Networks (MLNs)? As graphs be-
come larger (in terms of the number of nodes and
edges) and complex (in terms of the number of en-
tity types and relationships), modeling the data using
a representation that preserves the structure and se-
mantics of data becomes important. A model that is
also amenable to efficient analysis is another issue to
reckon with. From these perspectives, MLNs offer
distinct advantages.
Simple graphs are unable to capture the complex-
ity of data and its semantics although a large num-
ber of analysis algorithms exist for them. Attributed
graphs can handle additional complexity with multi-
ple edges, but lack analysis algorithms. MLNs, as a
network of networks, offer separation of semantics (as
individual layers) and flexibility of analysis (when de-
coupling approach (Santra et al., 2017b; Santra et al.,
2017a) is used) using desired subsets of layers. In ad-
dition, extant simple graph analysis algorithms can be
leveraged in the decoupling approach.
If MLNs are used for modeling, each layer in the
MLN represents a different relationship, either be-
36
Rai, A., Roy, A., Santra, A. and Chakravarthy, S.
MLN-Subdue: Substructure Discovery In Homogeneous Multilayer Networks.
DOI: 10.5220/0012906200003838
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2024) - Volume 1: KDIR, pages 36-47
ISBN: 978-989-758-716-0; ISSN: 2184-3228
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
tween the same type of entities within a layer (in-
tralayer edges), or across layers between different
types of entities (interlayer edges). The advantages
of modeling data using MLNs are discussed in (Boc-
caletti et al., 2014; Santra et al., 2017b; Kivel
¨
a et al.,
2013). However, with the use of MLNs, the challenge
is to extend graph analysis algorithms, be it commu-
nity, centrality, or substructure detection, to the new
representation.
Depending on the types of entities, multiple layers
can be defined for the same (or a subset of) entity type
or different entity types. MLNs can be of three dif-
ferent types: Homogeneous, Heterogeneous, and Hy-
brid. Homogeneous Multilayer Networks (HoMLNs)
are used to model multiple distinct relationships ex-
isting between the same type of entities. Each set of
intralayer edges represent one particular type of re-
lationship, and the interlayer edge sets are implicit,
as the same set of nodes are present in every layer.
For example, the same set of actors can be connected
based on co-acting, similar average rating, and similar
movie genres they work in forming three different lay-
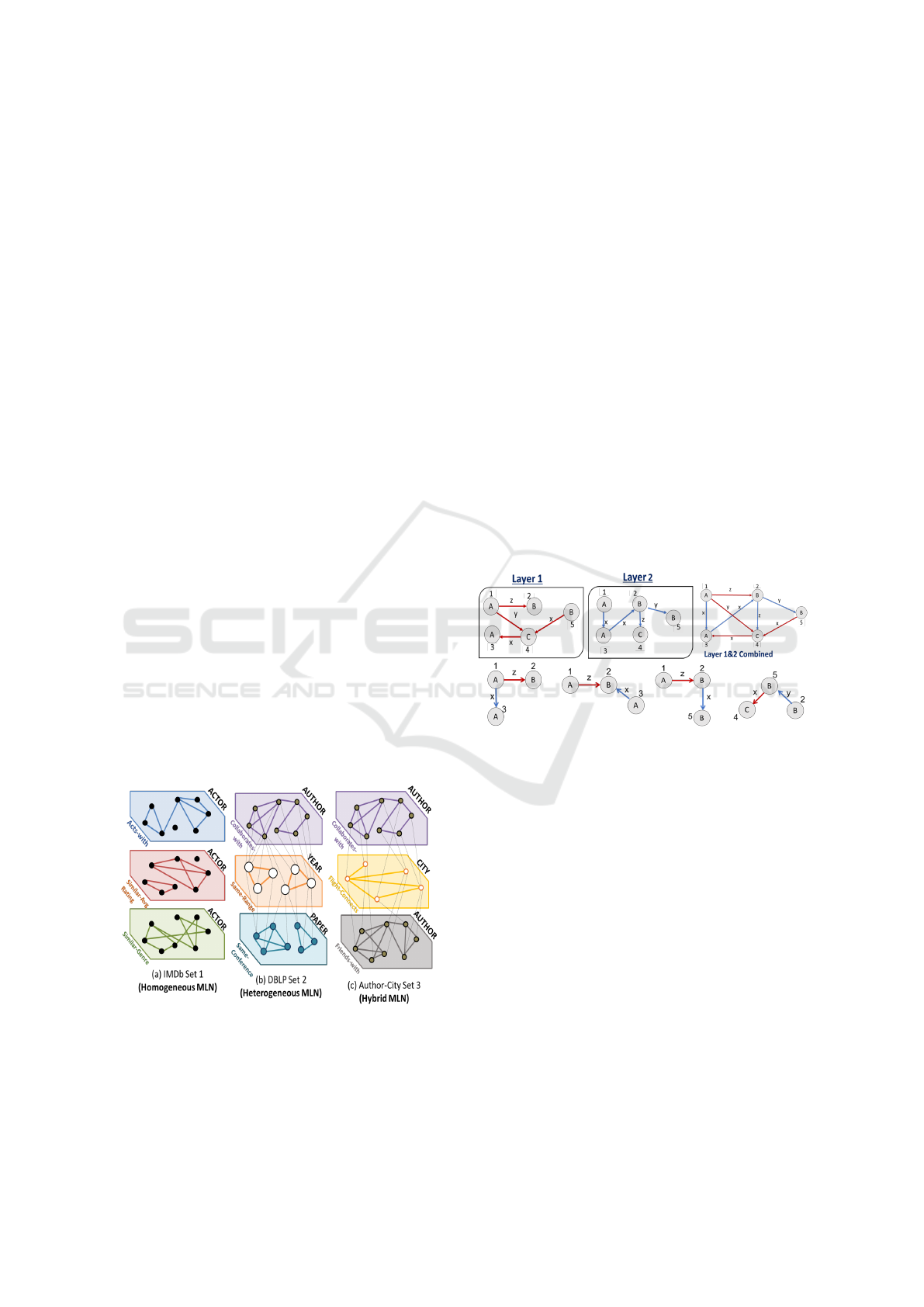
ers as shown in Figure 1 (a). Relationships among dif-
ferent types of entities are modeled through Heteroge-
neous Multilayer Networks (or HeMLNs), as shown
in Figure 1 (b). The interlayer edges here are explic-
itly represented to demonstrate the relationship across
layers. For example, there can be edges between the
author layer and paper layer, if an author has writ-
ten that paper. Finally, for data that includes multi-
ple relationships within and across different types of
entity sets, a combination of homogeneous and het-
erogeneous multilayer networks can be used, called
Hybrid Multilayer Networks (or HyMLNs), as shown
in Figure 1 (c).
Figure 1: Examples of MLN Types.
Why Map/Reduce? We have used the Map/Reduce
paradigm as an example of the distributed and parallel
processing approach. Without loss of generality, any
other paradigm (e.g., Spark) can be used in its stead
without modifying the overall approach.
Problem Statement: The problem addressed in this
paper is finding interesting and frequent substruc-
tures in a given Homogeneous Multilayer Network
(HoMLN) using the decoupling approach proposed
in (Santra et al., 2017a; Santra et al., 2017b; Santra
et al., 2022) to leverage its advantages. This amounts
to not converting the MLN into a single graph, but still
getting the same result as if the MLN was processed
as a single graph.
The main challenge here is to use the substruc-
tures generated for each layer independently and in
parallel to compose them to compute the missing sub-
structures that span multiple layers correctly and ef-
ficiently. To the best of our knowledge, there are
no MLN substructure discovery algorithms. How-
ever, the rationale for using the decoupling approach
is that existing algorithms from the literature(Cook
and Holder, 1993; Das and Chakravarthy, 2015) can
be used effectively for each layer. When these algo-
rithms are used to find substructures in each layer in-
dependently, many substructures that span layers will
be missing as shown in Figure 2.
Figure 2: Substructures that span layers - only combined
graph can generate them (color coded).
Approaches for MLN Substructure Discovery:
MLNs can be processed for various types of analyses
(community detection, substructure discovery etc.)
Alternative approaches are listed below with a brief
explanation.
1. Traditional Aggregation Approach: In this ap-
proach, layers of a MLN are conflated into a single
graph. Boolean AND or OR aggregation can be used
to reduce a HoMLN to a simple graph and find sub-
structures correctly for a given multilayer network.
The aggregation process can be costly (depending on
the number of layers) and the resulting graph can be
large (for OR composition). As a result, substructure
discovery time can be significantly greater than that of
a single layer. This approach also restricts paralleliza-
tion as each layer cannot be processed in parallel. The
loss in MLN structure, due to aggregation, also makes
it difficult to drill-down results without maintaining
MLN-Subdue: Substructure Discovery In Homogeneous Multilayer Networks
37

extensive mapping. Finally, for processing a subset of
layers, separate aggregation is required – making the
approach less flexible and inefficient.
2. Decoupling-Based Approach: It is a “divide
and conquer” approach for analyzing multilayer net-
works. The goal is to find substructures in each layer
independently and then use a separate composition
function to combine the results to generate what is
missing for that analysis (e.g., community, central-
ity, substructure, motif, etc.) The decoupling-based
approach used in this paper to address the substruc-
ture discovery problem is described along with a fig-
ure (Figure 5) in Section 4.
3. Holistic Approach: In this approach, neither the
MLN is aggregated nor the decoupling approach is
used. An algorithm is developed from scratch (as
available graph analysis algorithms cannot be used as
in the previous two approaches), keeping the struc-
ture and semantics intact. However, a new algorithm
need to be developed for each analysis making this
approach complex as the algorithm needs to traverse
back and forth across layers. This approach has been
used for coherent clusering in (Boden et al., 2012)
We use the decoupling-based approach in this pa-
per as it is efficient and extant analysis algorithms
(there are several of them depending on the analy-
sis) can be used. The main challenge to be addressed
is the development of the composition function and
establishing its correctness (soundness and complete-
ness.) Also, evaluating the efficiency of this approach
as compared to the aggregation approach (used as GT
or ground truth for validation.)
The contributions of this paper are:
• Adapting the decoupling approach for substruc-
ture discovery
• Developing Map/Reduce approach for substruc-
ture discovery
• Composition algorithm for HoMLN substruc-
ture discovery
• Establishing the empirical correctness of the
composition algorithm
• Extensive experimental analysis with diverse
synthetic and real-world datasets
This paper is organized as follows. Section 2 dis-
cusses related work. Section 3 discusses the prelimi-
naries for substructure discovery using Map/Reduce.
Section 4 details the adaptation of the decoupling
approach for iteration-based substructure discovery.
Section 5 discusses the composition algorithm and
its correctness. Section 6 discusses the Map/Reduce
approach for distributed and parallel computation on
MLN. Section 7 provides experimental analysis. Con-
clusions are in Section 8.
2 RELATED WORK
SUBDUE (Cook and Holder, 1993; Ketkar et al.,
2005) was developed as a main-memory substruc-
ture discovery algorithm. It performs a computa-
tionally constrained beam search where substructures
of increasing size are generated iteratively and eval-
uated using the Minimum Description Length (or
MDL) (Rao and Lu, 1992) metric. The algorithm be-
gins with all substructures of size one (i.e., an edge),
and in each iteration expands the instances by one
neighboring edge in all possible ways. After each it-
eration, the top beam (parameter specified) substruc-
tures are carried over to the next iteration. Best sub-
structures are output based on the size and other pa-
rameters specified.
Due to the limitations of the main-memory ap-
proach, the disk-based approach (Wang et al., 2005)
stores the data on disks and stages chunks of data
to memory as needed. The graph is indexed to
speed up retrieval. However, this approach needs
to marshal data between the disk and main memory
buffer, and its performance can be very sensitive to
buffer size, replacement policies, hit ratios, etc. To
overcome the pitfalls of the disk-based approach, a
database management system (or DBMS) was used
to store the graph and SQL for substructure discov-
ery(Padmanabhan and Chakravarthy, 2009). This
takes advantage of the buffer management and opti-
mization provided by the DBMS. Although scalabil-
ity was achieved to graphs of over a million nodes
and edges, use of self-joins on large relations for sub-
structure expansion seems to have made it difficult to
go beyond due to computation resulting in unaccept-
able response time. Also, it appears that the removal
of duplicate substructures required sorting columns in
row-based Relational DBMS, making it expensive in
terms of the number of joins needed.
As the graph sizes grew further with the advent
of social networks and the Internet, graphs had to be
partitioned to deal with the increasing sizes. As a
result scalable parallel computing algorithms had to
be developed. Map/Reduce (Das and Chakravarthy,
2015; Das and Chakravarthy, 2018) and other archi-
tectures were used to address the problem of substruc-
ture discovery on a large graph by dividing the graph
into smaller partitions and then combining the results
across partitions. In addition to substructure discov-
ery, partitioning of graphs has been explored in other
KDIR 2024 - 16th International Conference on Knowledge Discovery and Information Retrieval
38

research as well (Yang et al., 2012).
With multilayer networks being used for modeling
large complex datasets, there is a need for substruc-
ture discovery algorithms on MLNs. A clustering al-
gorithm (Boden et al., 2012) for finding clusters in a
multilayer graph has been proposed using the holis-
tic approach described earlier. Similarly, another al-
gorithm (Liu and Wong, 2008) has been proposed to
find quasi-cliques to find all one-dimensional clusters
in a single layer, which are then used to find multi-
dimensional clusters. The focus of this work is to
find clusters of vertices that are densely connected by
edges with similar edge labels in a subset of graph
layers.
This paper differs from the above in that we
are proposing a decoupling-based algorithm for sub-
structure discovery that gives the same results as the
ground truth. It is also efficient as compared with the
algorithm used for GT. Further, it uses Map/Reduce
to process each layer and for composition providing
better scalability than extant approaches.
3 TERMINOLOGY USED
Graphs are input as text files and this section indicates
input formats for MLN-Subdue as well as some termi-
nology needed for understanding the paper.
Input Graph Representation: For substructure dis-
covery, labeled graphs are used where vertex and edge
labels are not assumed to be unique, but all vertex
IDs are unique. The input graph is represented as
an unordered list of 1-edge substructures where each
edge is represented as a 5-element tuple <edge label,
source vertex id, source vertex label, destination ver-
tex id, destination vertex label>. The input graph is
stored in an ASCII file with a 1-edge substructure in
each line. If needed, graphs in other formats are con-
verted to this format.
Adjacency List: Adjacency list of a vertex ID is the
set of edges that are incident (both outgoing and in-
coming) on that vertex ID. The adjacency list is used
to expand a substructure from each vertex ID in that
substructure using an edge from the adjacency list.
Each 1-edge expansion becomes a separate substruc-
ture. This allows an n-edge substructure to be ex-
panded into a number of (n+1)-edge substructures in
an iteration.
Substructure Expansion: Starting from 1-edge, sub-
structures of increasing size are generated systemati-
cally in each iteration using the adjacency list. As
the goal is to discover interesting substructures of any
size, systematic graph expansion is critical to the pro-
cess. Expansion is done on each substructure inde-
pendently as indicated above. Expansion is uncon-
strained, i.e., each substructure independently grows
into a number of larger substructures in each iteration.
This independent expansion leads to the generation of
duplicate substructures which must be removed to en-
sure correctness. A substructure is represented as a
(lexicographically) ordered list of edges.
Canonical Instances for Duplicate Elimination:
Lexicographic ordering of edges in a substructure is
used to identify duplicates. Each edge in a substruc-
ture is ordered based on edge label, then source vertex
label, then destination vertex label, and finally source
and destination vertex IDs. If any of the values match,
the comparison moves forward to the next compo-
nent, else the ordering is performed. A substructure
can be uniquely represented using the lexicographic
order of 1-edge components. This is called a canoni-
cal k-edge instance. Intuitively, two duplicate k-edge
substructures must have the same ordering of labels
and vertex IDs when converted to canonical k-edge
instance
1
. Figure 3 shows an example of duplicate
substructures generated by two different substructure
instances during independent expansion and how they
are detected as duplicates using their canonical in-
stances.
Canonical Substructures for Graph Isomorphism:
Isomorphs in a graph have the same graph structure
in terms of vertex and edge labels as well as connec-
tivity, but differ in vertex IDs. In contrast, duplicates
have the same vertex IDs. After duplicate elimina-
tion, we need to identify isomorphs to count their oc-
currences. We need to convert canonical instances of
substructures to canonical substructures using rela-
tive ordering of vertex IDs. Intuitively, in the canoni-
cal form, two isomorphic substructures have the same
relative ordering of vertex numbers. To identify
isomorphs, the canonical instance is converted into
a canonical substructure. This is done by replacing
each vertex ID with their relative positions in the in-
stance starting from 1. The inclusion of these relative
positions is critical for differentiating the connectivity
of the instances. Figure 4 shows an example of how
canonical substructure is created from the canonical
instance. It can be seen that the isomorphs have differ-
ent canonical instances. Using the above technique,
the relative positioning of vertex Ids (2, 5, 4) for the
canonical instance 1 and (7, 10, 9) for the canonical
instance 2 are converted to (1, 2, 3). Hence we can
1
Substructures and substructures instances are used in-
terchangeably when the meaning is clear from the context.
However, substructure instances are converted into rela-
tive ordering of vertex IDs, termed canonical substructures,
which are used for detecting substructure isomorphs.
MLN-Subdue: Substructure Discovery In Homogeneous Multilayer Networks
39
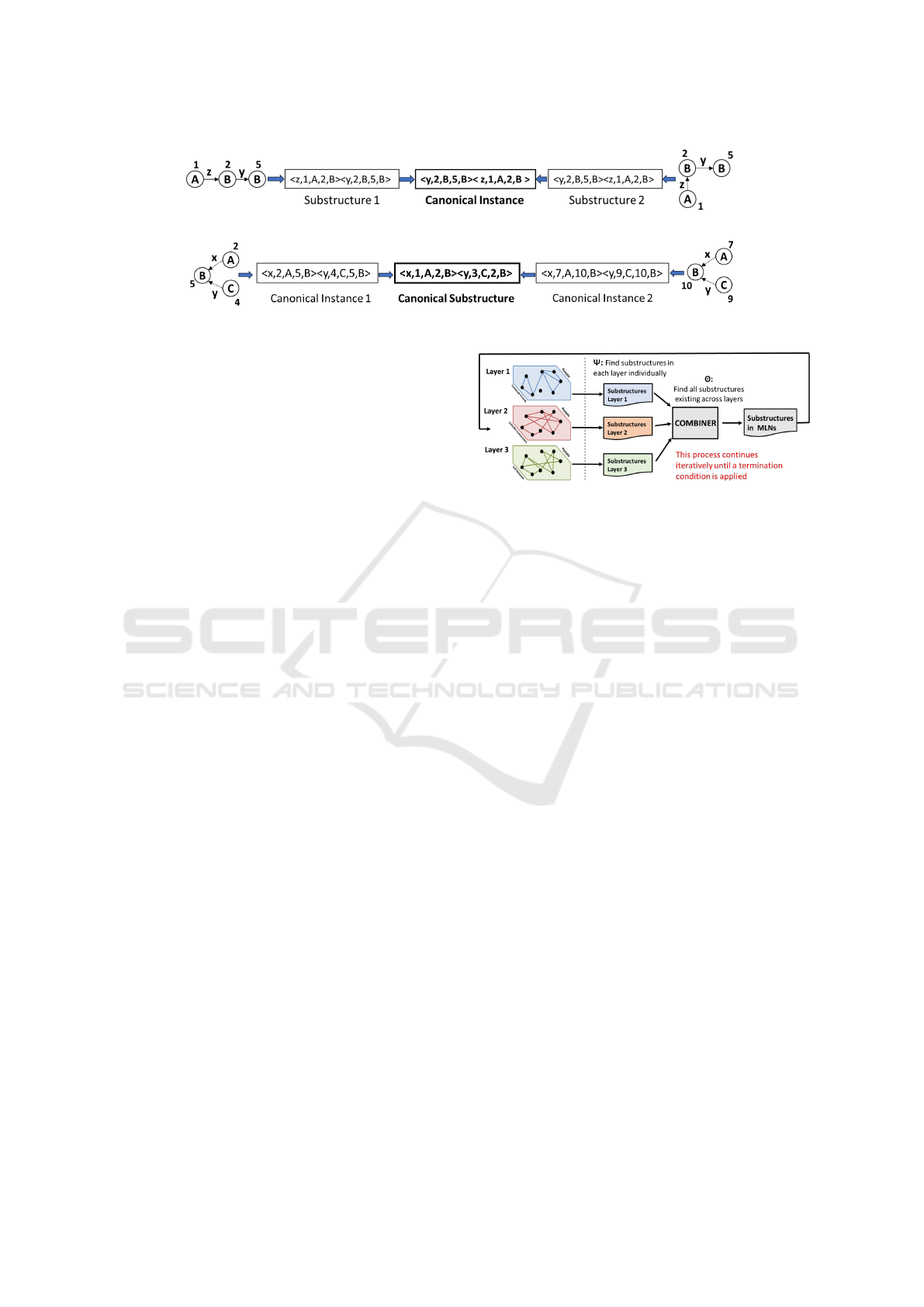
Figure 3: Duplicate substructure identification using canonical instances.
Figure 4: Graph isomorphism and canonical substructures.
identify isomorphs using canonical substructures.
Metrics for Ranking: Many metrics are used to
rank substructures based on isomorphs. Frequency of
isomorphic substructures is one such metric (higher
the frequency, the better the substructure.) Another
widely used information-theoretic metric is the Min-
imum Description Length (or MDL (Rao and Lu,
1992)). MDL calculates the importance of a substruc-
ture on how well it compresses the entire graph/forest.
A substructure that compresses the graph better is
considered an interesting and repetitive substructure.
When MDL is used, an MRN (Most Restrictive
Node)(Bringmann and Nijssen, 2008; Elseidy et al.,
2014) metric is used to count non-overlapping in-
stances. But overlapping instances have also been
used to compute frequency and MDL for each sub-
structure.
4 DECOUPLING APPROACH
Multilayer networks consist of multiple layers of sim-
ple graphs where each layer represents a relationship
between entities in that graph. However, most algo-
rithms convert a MLN (or a subset of it) into a sim-
ple graph using aggregation (Domenico et al., 2014)
and/or projection techniques (Berenstein et al., 2016)
to use extant algorithms. However, this leads to loss
of structure, semantics, and information from the fi-
nal analysis results (Kivel
¨
a et al., 2013; De Domenico
et al., 2014). For the other end, existing single
graph algorithms cannot be directly used for the holis-
tic approach described earlier. In this paper, the
decoupling-based approach has been used which pre-
serves the structure and semantics of MLNs (Santra
et al., 2017a; Pavel et al., 2023) while performing
analysis on complex datasets without losing any infor-
mation. It is also shown to be efficient (Santra et al.,
2017a).
The network decoupling approach has been il-
lustrated with respect to substructure discovery in
HoMLNs (focus of the paper) in Figure 5, where each
Figure 5: Substructure Discovery: Decoupling Approach.
layer has the same set of nodes but different edge
connectivity. It consists of two functions: analysis
(Ψ) and composition (Θ). Using the analysis func-
tion, each layer in the network is analyzed indepen-
dently (and in parallel) to obtain the layer substruc-
tures. Then, the partial results from any two (or more)
layers are combined and processed by the composi-
tion function to produce substructures that span par-
ticipating layers. This is done for each iteration as
substructure discovery is an iterative algorithm. This
composition can be binary or n-ary. If binary, it can be
repetitively applied to n layers using previously gen-
erated results. This approach allows parallel analy-
sis of each layer to improve efficiency (Santra et al.,
2017a). Further, due to the layer-wise analysis, each
graph is likely to be small, which requires less mem-
ory for computing layer-wise results. Each layer is
also analyzed only once, and the existing single graph
algorithms can be used for that. The results obtained
are then used by the composition function. In addi-
tion, this approach is application-independent.
In this approach, the major challenge is to de-
velop the composition algorithm (Ψ) which is sound
and complete in generating missing substructures that
span layers. It is known from earlier work that sub-
structure generation in each layer is sound and com-
plete.
5 ALGORITHM DESIGN
Substructure discovery in single (simple and at-
tributed) graphs is an iterative process, where inter-
KDIR 2024 - 16th International Conference on Knowledge Discovery and Information Retrieval
40
Algorithm 1 : MLN-Subdue: Substructure Discovery Al-
gorithm for Homogeneous Multilayer Networks.
Require:
Input: Substructures of size k for k
th
iteration
Output: Top beam substructures (intralayer & inter-
layer) of size k+1
1: Load Adjacency list for each layer
2: for each substructure of size k in MLN:
3: Expand each k-edge substructure by one edge in all
directions in each layer
4: Eliminate Duplicates using canonical representa-
tion in each layer
5: end for
6: for each expanded k + 1 edge substructure:
7: Group all the expanded substructures from each
layer based on vertex ID
8: Apply Combine-MLN recursive function to form
k + 1 edge interlayer substructures from k+1 edge in-
tralayer substructures
9: Eliminate duplicates generated during combination
10: end for
11: for all the canonical instances in the MLN:
12: Count the frequency of all substructures using iso-
morphism
13: end for
14: Apply metric Frequency or MDL
15: Apply beam heuristic to determine top-beam sub-
structures and send their instances to be used the next
iteration // Specify beam as required
16: Increment k by 1 for next iteration
17: Goto Step 1 for the next iteration
esting (k+1)-edge substructures are generated in the
k
th
iteration after a multi-step process – independent
substructure instance expansion, conversion to canon-
ical form, duplicate elimination, substructure count-
ing & metric evaluation, ranking based on graph iso-
morphism, and finally, retaining top beam substruc-
tures to be used for the next iteration. For using the
divide-and-conquer-based decoupling approach, the
main task during the k
th
iteration is to figure out how
to systematically use the beam k-edge substructures
and composed substructures (from the previous itera-
tion) to generate next beam (k+1)-edge substructures
correctly and completely. Thus, in case of MLNs,
the challenge is to perform the substructure discovery
(from expansion to substructure ranking) synergisti-
cally using what is generated in the layer-wise analy-
sis phase and what is composed in the previous itera-
tion.
Algorithm 1 presents the composition algorithm
to discover interesting substructures in HoMLNs. The
major steps are discussed below:
Expansion (Layer-wise): In the k
th
iteration, all in-
stances of the beam k-edge substructures, generated
in the previous iteration, are used (for k = 1, all edges
in the layer are used.) In each layer, using the ad-
jacency list for that layer, each substructure instance
is expanded independently by adding one incident
edge (both in and out) to generate as many (k + 1)-
edge substructure instances using the adjacency list
(Lines 1 & 2 of Algorithm 1). However, this uncon-
strained expansion generates local (layer-wise) dupli-
cates, which are identified using canonical ordering
(as outlined in Section 3) and are eliminated (Line 4).
Composing Layer-wise Substructures: This step
generates substructure instances similar to the expan-
sion in layers, but uses a substructure from one layer
and edges from a different layer which are termed
composed interlayer substructures. To achieve this,
first the expanded substructure instances generated
from each layer are grouped based on a shared ver-
tex ID (Line 7) as vertex IDs are the same in all lay-
ers of HoMLNs. This brings together the substruc-
ture instances from all layers that have a shared vertex
ID. Then, a recursive call (Combine-MLN) is made
(with two parameters: set of layers, and size of the
substructure) to combine the intralayer substructures
from different layers sharing a common vertex ID, to
generate (k +1)-edge substructures that span multiple
layers (Line 8). Here, the recursive call performs a
systematic exploration of all combination possibilities
to generate a (k + 1)-edge substructure from m layers
using the layer-wise substructures of size (k+1). This
is applied on all vertices.
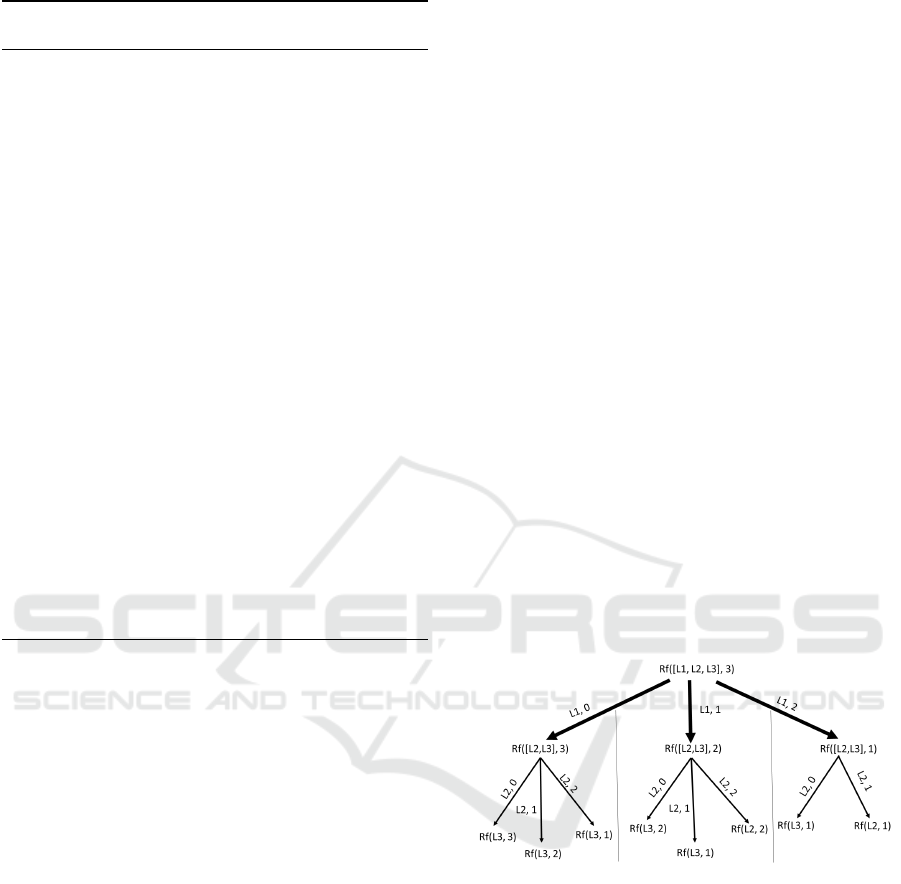
Figure 6: Combination possibilities of generating a 3-edge
interlayer substructure.
Figure 6 shows an example of the combinatorial
possibilities applied by the Combine-MLN recursive
function, where the set of layers is [L1, L2, L3] and
the substructure size is 3. For example, one possibility
is to choose 2 edges from L1 and 1 edge from either
L2 or L3 (the rightmost subtree) or 1 edge from L1,
one edge from L2, and 1 edge from L3 (middle sub-
tree.) Also, this composition stage ensures that only
connected composed substructures are generated.
Figure 7 illustrates the working of Combine-MLN
on a 2-layer MLN. For each layer we show all the
2-edge substructures. When we apply the Combine-
MLN function on each Vertex id of the graph as
shown above, we find all the substructures of size
MLN-Subdue: Substructure Discovery In Homogeneous Multilayer Networks
41
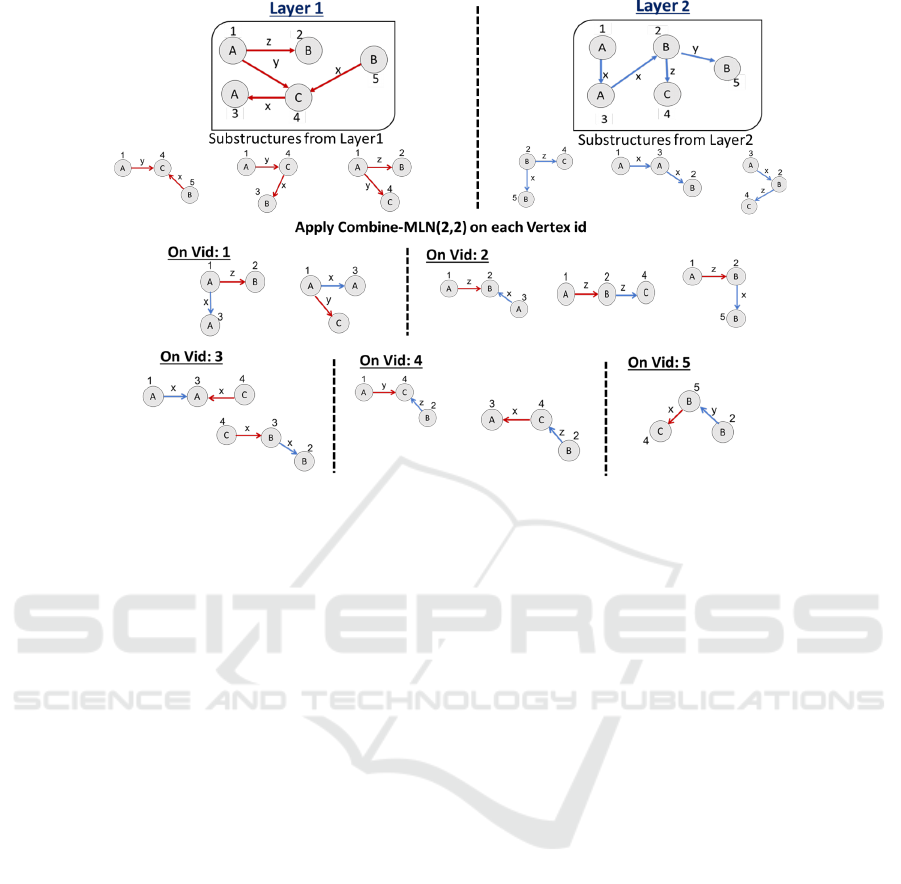
Figure 7: Generating composed interlayer substructures by combining intralayer substructures on shared vertex id.
2, which exist across layers. The parameters of
Combine-MLN function here is (2,2), which means
there are 2 layers and the required size of the sub-
structure is 2.
Duplicate Elimination: The previous step leads to
the generation of duplicate instances (e.g., from fig-
ure 6, the center branch would be generated while
expanding on each of the three layers, L1, L2, and
L3.) As the composed substructures are cast into the
canonical form, duplicates are identified and removed
(Line 9).
Frequency Counting: Exact isomorphs are used
to detect identical substructures, as two isomorphic
substructures have the same relative ordering of the
vertex IDs and have same vertex and edge labels.
Canonical instances follow the lexicographic order-
ing, hence it is easy to generate k-edge canonical sub-
structures using the relative ordering of unique vertex
ID in the order of their appearance in the canonical
instance. All the instances are grouped based on their
canonical form and their frequency is counted (Line
12).
Application of Metric: To restrict the future expan-
sion to high quality substructures, a metric – either
MDL or frequency – is used to determine the impor-
tance of a particular substructure (Line 14). The beam
parameter (user specified with a default) is used as
a heuristic to ensure only the top beam substructures
based on the metric score will be passed on to the next
iteration, thereby restricting the expansion of less im-
portant substructures (Line 15).
Using the proposed algorithm, top substructures
of size k+1 that exist within and across layers in the
k
th
iteration are generated. Algorithm 1 is applied it-
eratively to find substructures of the desired size.
6 MAP/REDUCE
IMPLEMENTATION
The different components of the proposed Algorithm
1 (layer-wise substructure expansion and duplicate
elimination followed by composition, and duplicate
elimination again in each iteration) have been imple-
mented using an iterative two-chained Map/Reduce
architecture. In the first Map/Reduce job, the map-
per performs the expansion of substructures and du-
plicate elimination in each layer, and the reducer per-
forms the composition to generate substructures that
span layers and removes the duplicates from the com-
posed substructures. In the second job, the mapper
converts all substructure instances into canonical iso-
morphic instances to count frequency and emits iso-
morphs as key. The reducer applies the metric and
outputs the top-beam substructures (intralayer and
spanning layers) to be used as candidates for expan-
sion in the next iteration. Figure 8 shows the overall
workflow of substructure discovery in a HoMLN us-
ing the Map/Reduce framework.
Expansion by Mapper 1: Substructure instances
KDIR 2024 - 16th International Conference on Knowledge Discovery and Information Retrieval
42
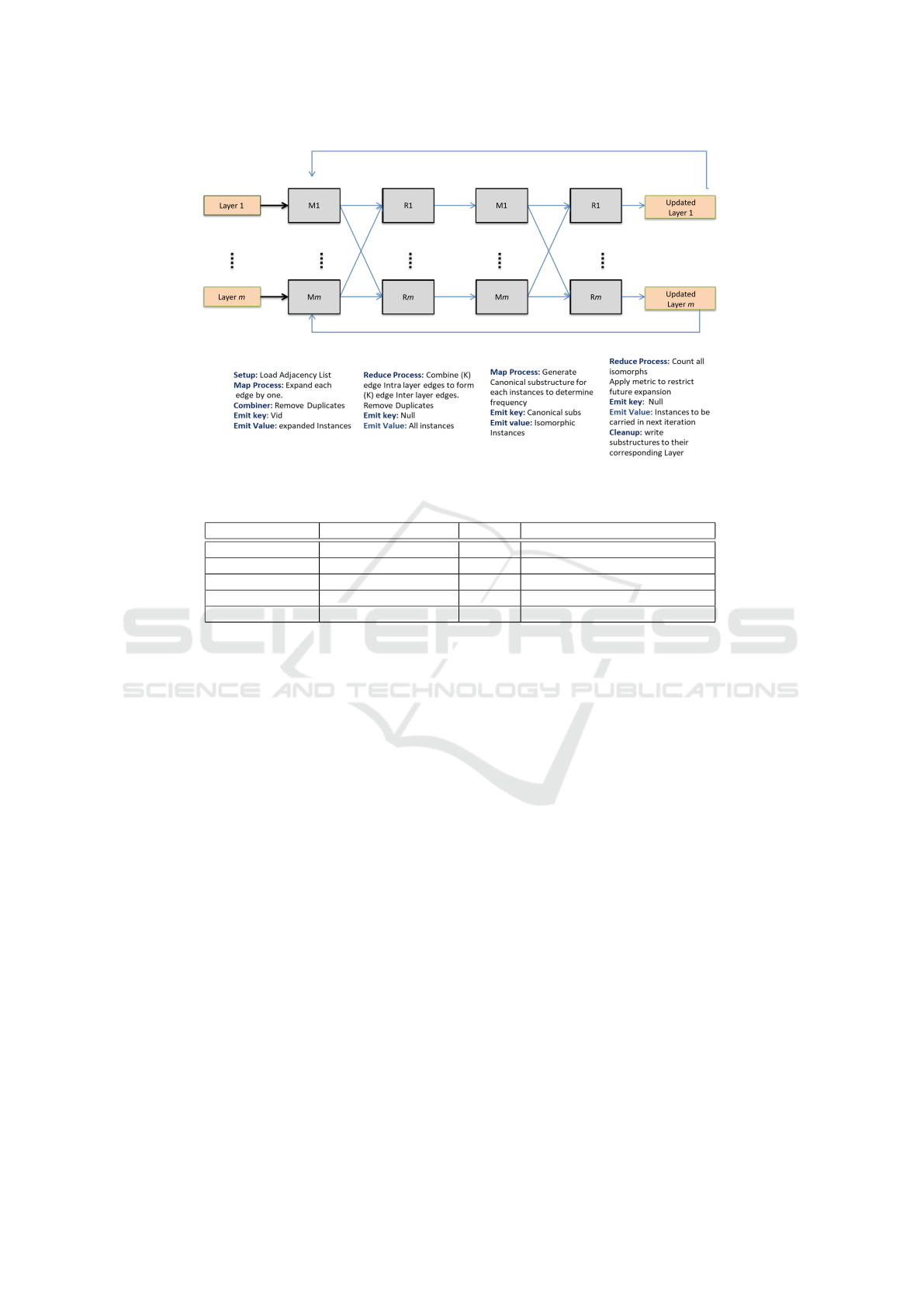
Figure 8: Map/Reduce workflow of MLN-Subdue (including composition).
Table 1: Dataset description.
Purpose Dataset #Nodes #Edges
Correctness Synthetic (SUBGEN) 10K 20K
Correctness Synthetic (SUBGEN) 100K 800K
Scalability LiveJournal 3.9M 34.8M
Scalability Orkut 3.87M 114.8M
Varying Density Synthetic (SUBGEN) 2K 1M, 1.9M, 2.9M, 3.9M
with their respective layer number are read as mapper
input, one at a time. The adjacency list for the layer is
loaded using the setup function. For the k
th
iteration,
the input is a k-edge canonical instance. Each instance
is expanded by one edge at a time using the adjacency
list. The mapper emits the vertex ID as key, and ex-
panded instances as values. As the expansion process
is unconstrained, duplicates are generated, which are
removed using a combiner. In this version, since each
layer is processed by a mapper (even as multiple map
tasks based on the block size), all duplicates can be
eliminated by the combiner.
Composition in Reducer 1: Each reducer receives
a list of expanded substructure instances as values,
grouped on the vertex ID as the key. The recur-
sive function (Combine-MLN) is used to combine all
(k + 1)-edge substructures from the mapper outputs
to generate (k + 1)-edge spanning substructures using
edges from multiple layers. All substructures, both
intralayer and spanning layers, are then emitted to the
next Map/Reduce job as input to generate canonical
substructures to determine graph isomorphism. The
key is null, and the value is the substructure instance.
Identifying Isomorphs in Mapper 2: Creating
canonical substructures from instances requires a
hash table to identify the relative positioning of each
vertex. The mapper receives all the substructure in-
stances as input, and canonical substructure is gener-
ated for every instance. The mapper emits the canoni-
cal substructure as the key and the corresponding sub-
structure instance as the value.
Ranking and Emitting top-beam Instances in
Reducer 2: The reducer receives substructure in-
stances across mappers grouped on canonical sub-
structure. The beam value is used to rank the best
beam substructures in a hash map. This is done by
calculating the MDL value for each canonical sub-
structure, and storing the top beam substructures with
the highest MDL values, emitting only their respec-
tive instances in order to restrict future expansion to
high-ranking substructures in the next iteration. The
reducer emits the (k + 1)-edge substructure instances
and layer IDs as the values in the k
th
iteration, which
are then fed into Mapper 1 of the next iteration as in-
put.
7 EXPERIMENTAL ANALYSIS
Experimental Setup: All experiments have been per-
formed using Java with Hadoop on Comet cluster
at SDSC (San Diego Supercomputer Center). The
MLN-Subdue: Substructure Discovery In Homogeneous Multilayer Networks
43
Comet cluster has 1944 nodes and each node has 24
cores (built on two 12-core Intel Xeon E5 2.5 GHz
processors) with 128 GB memory, and 320GB SSD
for local scratch space.
Dataset Description: Experiments were done on sev-
eral real-world and synthetic datasets (as shown in
Table 1) of varying sizes to establish the correctness,
speedup, and scalability of the approach. Subgen
2
, an
artificial graph generator was used to generate syn-
thetic graphs as it allows the embedding of substruc-
tures with user-defined frequency in a larger single
graph. To generate HoMLN datasets from each base
single graph, edges were randomly distributed across
multiple layers among the same set of nodes.
Empirical Correctness: For a given HoMLN with
multiple layers, the ground truth is generated by first
aggregating the MLN into a single graph by taking
the union of edges (Boolean OR) and then executing
SUBDUE(Ketkar et al., 2005). Both the proposed al-
gorithm and SUBDUE for different HoMLNs gener-
ated the same set of substructures with correct fre-
quency, thus establishing the correctness of the ap-
proach empirically.
Figure 9: Example 5-edge Embedded Substructure.
However, SUBDUE being a main memory ap-
proach failed to execute on large graphs with more
than 100K vertices & 800K edges. So, to verify the
correctness on large graphs, synthetic graphs were
generated having substructures embedded with a user-
defined frequency, the goal being to find the same sub-
structures with the same frequency. A 5-edge embed-
ded substructure, shown in figure 9, was embedded
with a frequency of 1000 in a graph of size 100K
vertices & 800K edges. The exact substructure was
found with the same frequency (of 1000) using the
proposed algorithm, which empirically validates the
correctness of the proposed algorithm for this dataset.
Several such experiments were conducted with
different embedded graph sizes and frequencies.
Effect of Layer Generation Schemes: This set of
experiments is performed using the synthetic dataset
of size 400K vertices & 1.2 million edges with em-
bedded substructures. Two partitioning schemes were
2
https://ailab.wsu.edu/subdue/
used: random and edge-based, to verify the correct-
ness of the algorithm and its effect on response time.
Random scheme partitions a graph into l layers by
distributing edges randomly. Nodes are same in all
l layers. Edge-based partitioning, on the other hand,
creates layers containing all edges having the same
edge label. Multiple edge labels can be in a layer in
edge-based partitioning.
Table 2: Edge distribution for different layer generation
schemes.
Layers Random Edge-Based
Layer 1 399903 351360
Layer 2 399730 478441
Layer 3 400637 370469
Table 2 shows the edge distributions for both parti-
tioning schemes. Notice that the distribution remains
even for random partitioning, but becomes skewed for
edge-based as there can be edge labels with higher
frequency going into a single layer, making it uneven.
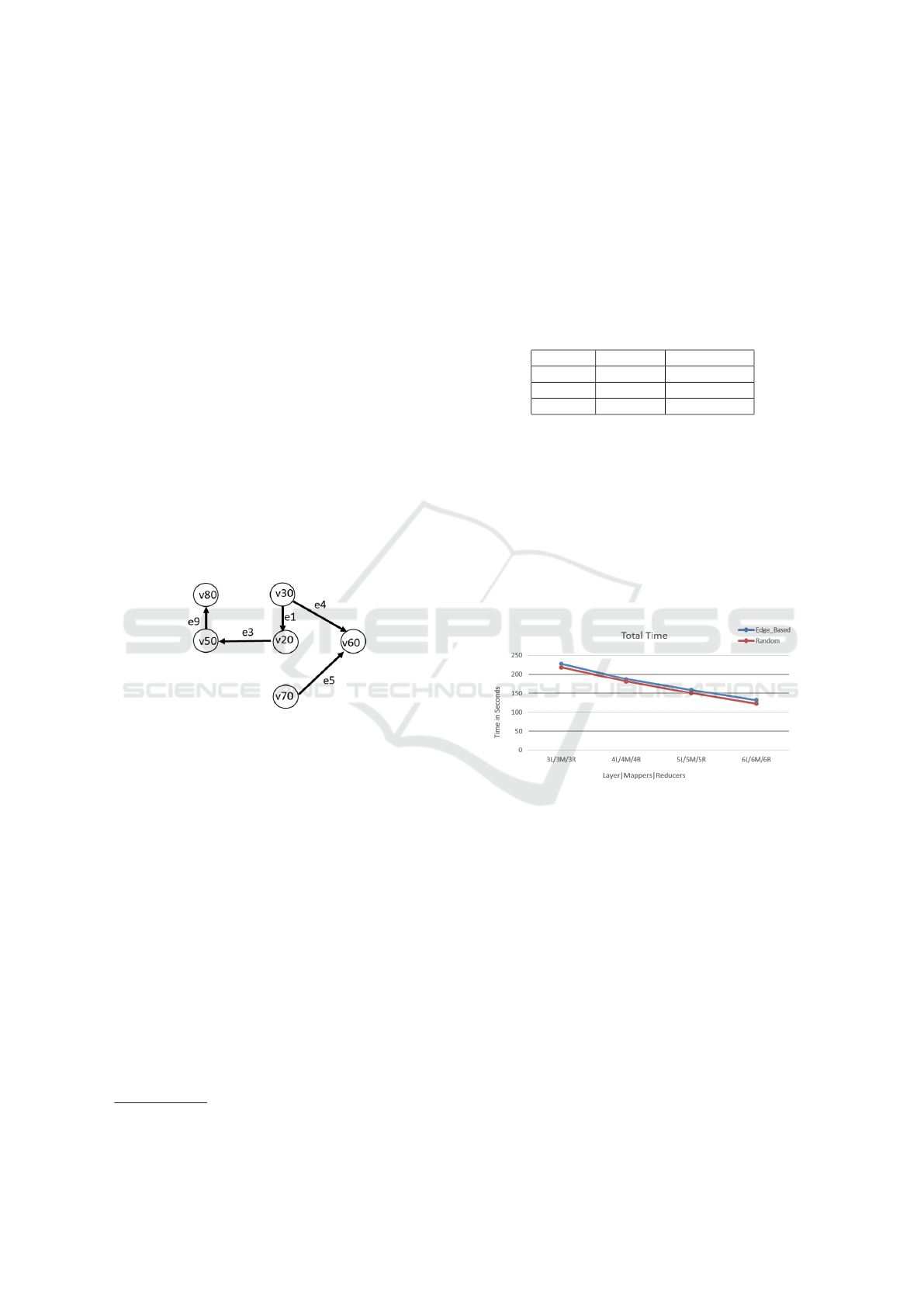
Figure 10 shows the total time taken by both of the
partitioning schemes. There is no substantial differ-
ence in the total response time as it more or less re-
mains the same. So, the numbers are drilled-down
into and the Map and Reduce times are inspected to
understand them clearly.
Figure 10: Total response time for partitioning schemes.
As seen in Figure 11, the total map time for edge-
based partitioning is significantly higher as compared
to the total map time for random partitioning. The
reason being, as the edge distribution is skewed, some
mappers end up processing more data for edge-based
partitioning, contributing to more computation time.
On the other hand, total time taken by the reducers
does not change as the data processed by each re-
ducer remains the same, because all the substructures
in the reducer are grouped based on their vertex IDs
and edge labels have no effect on them.
The same embedded substructures were found for
both partitioning schemes, indicating that the algo-
rithm is not affected by the connectivity of the graph.
Scalability of Approach: Without altering the graph
size, an increase in the number of processors is typi-
KDIR 2024 - 16th International Conference on Knowledge Discovery and Information Retrieval
44
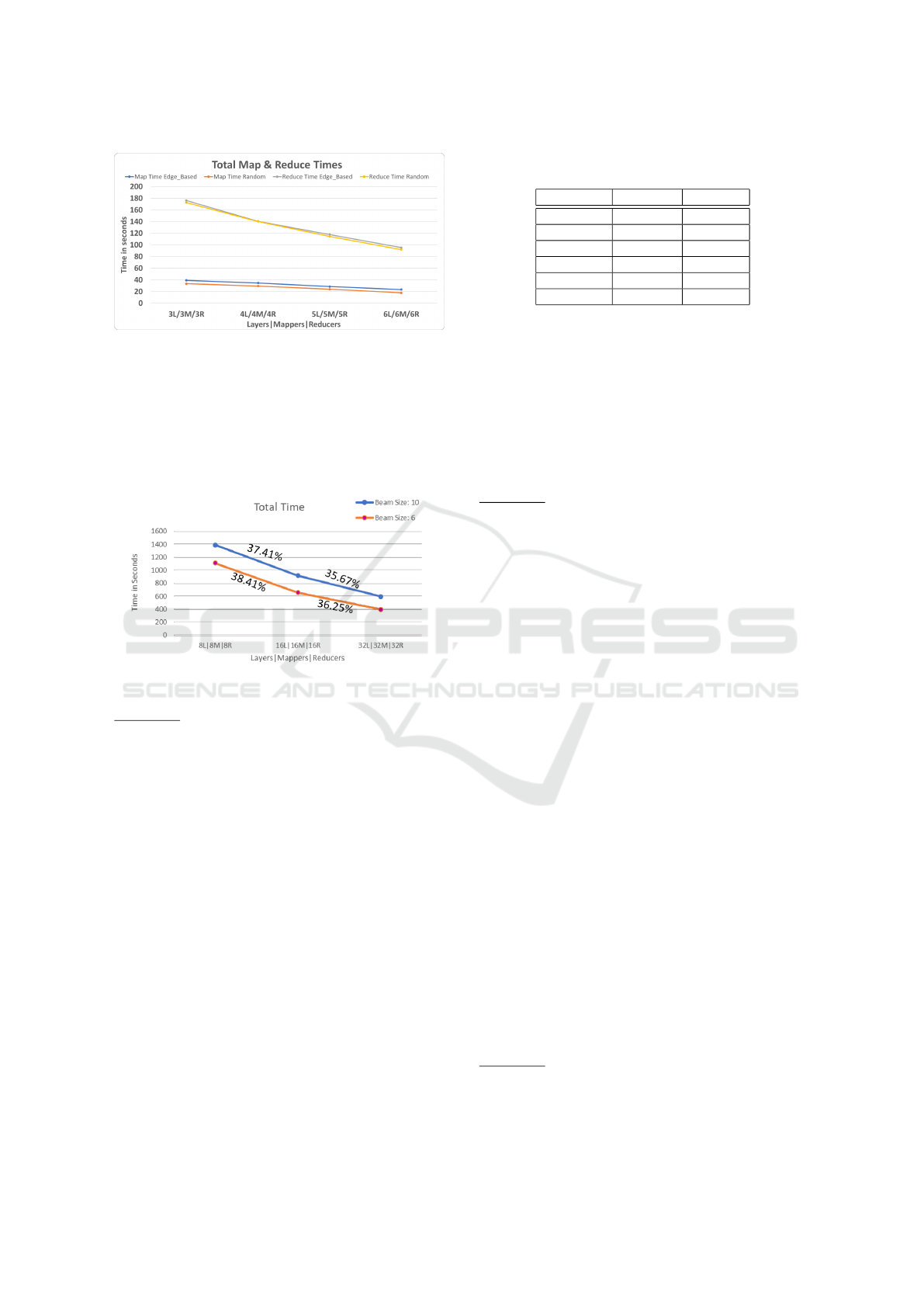
Figure 11: Map & Reduce times using multiple partitioning
schemes.
cally beneficial for mining. So, this set of experiments
was performed on LiveJournal (Leskovec and Krevl,
2014a) and Orkut (Leskovec and Krevl, 2014b) data
to determine the speedup and effectiveness of the al-
gorithm as the number of processors was increased.
This has been showcased using 3 scenarios:
Figure 12: Speedup achieved on LiveJournal data.
Scenario 1: Same number of mapper and reducer
nodes as layers: For this scenario, all the layers are
processed in parallel with the same number of map-
per and reducer nodes. Results in Figure 12 show
a speedup of over 35% for the LiveJournal dataset
when the number of layers, mappers, & reducers are
increased from 8 to 16, and again from 16 to 32. As
the same dataset is partitioned into more layers and
processed by greater number of processors, it leads to
smaller partitions and less computation in each pro-
cessor. This reduction in computation cost contributes
to the speedup achieved. Moreover, as the number of
layers and reducers are doubled, the data received by
each reducer node gets halved, but the mining cost
in the 1st reduce job also increases, as the height of
the tree grows with the increase in number of layers
(as there are composed substructures that span more
layers and the number of combinations for the recur-
sive procedure Compose-MLN increases), leading to
a higher number of possible interlayer combinations.
Figure 12 also shows that the total time taken
when beam size is set to 10 is more as compared to
beam size 6. This is because as the beam size in-
Table 3: Number of substructures generated in each itera-
tion with beam 10 and 6 for the LiveJournal data.
Iterations Beam 10 Beam 6
1 2836928 2836928
2 3929240 3172184
3 4593864 3628496
4 5249968 3849008
5 5346152 4004984
6 5716984 4128496
creases, the number of substructures carried forward
in each iteration increases (illustrated in Table 3), re-
sulting in more data being processed by each proces-
sor.
Orkut and LiveJournal datasets were used for
the next two scenarios with 32 layers (Figures 13a,
13b.) The purpose is to understand the impor-
tance of mappers vs. reducers with respect to the
work/computation done during the algorithm.
Scenario 2: Changing only the number of reducer
nodes: In this scenario, the number of mapper nodes
is fixed at 32, and the number of reducer nodes is var-
ied to see the effect of reducers on response time.
Figure 13a initially shows a high percentage of
speedup for both LiveJournal and Orkut in the re-
duce phase when the number of reducer nodes is in-
creased from 8 to 16 to 32. But after that, the speedup
starts to plateau, with the percentage improvement re-
ducing significantly when going from 32 to 40 and
then to 48 nodes. So, merely adding more reducer
nodes beyond a certain number does not keep improv-
ing speedup, as the overhead (e.g., reducer setup &
cleanup) increases. Orkut takes more absolute time
than LiveJournal, as it has more than 3 times the num-
ber of edges for a similar number of vertices, leading
to more expansion and combination possibilities. In
contrast to the reduce time, total time is shown in
Figure 13b. This speedup is similar to the reduce
time (except in absolute values) indicating that all the
speedup comes from the reducers. This matches the
work done in the reducers as explained in Section 6
and validates the need for more reducers. Remem-
ber, composition is happening in the reducer of job 1
and counting all isomorphs and metric computation is
happening in the reducer of job 2.
Scenario 2 clearly indicates that the mappers take
less time overall as compared to the reducers. Hence,
distributing reduce computation among more re-
ducers has a significant effect on the speedup
which is exemplified in scenario 3 below.
Scenario 3: Changing only the number of mapper
nodes: Here, the number of reducer nodes is fixed
at 32, and the number of mapper nodes is varied to
inspect the effect of mappers on response time.
MLN-Subdue: Substructure Discovery In Homogeneous Multilayer Networks
45

(a) Effect on Reduce Phase Time. (b) Effect on Overall Map/Reduce Time.
Figure 13: Speedup comparison by varying only the number of reducer nodes.
(a) Effect on Map Phase Time. (b) Effect on Overall Map/Reduce Time.
Figure 14: Speedup comparison on varying only the number of mapper nodes.
In Figure 14a, significant speedup is seen in the
map time as the number of mapper nodes is increased
from 8 to 16 to 32. But the total time shown in Fig-
ure 14b is distinctly different from the one we see in
Figure 13b. Total time speedup has reduced signif-
icantly due to much smaller portion of the computa-
tion being distributed. This, again, clearly indicates
that there is not much computation in the mappers
to effectively distribute them to improve the over-
all Map/Reduce performance. In both jobs in the
chain, the reducers are doing heavy lifting in this ar-
chitecture. From Scenarios 2 and 3, it can be inferred
that for this algorithm, prioritizing an increase in the
number of reducers over mappers is more beneficial,
as the reduce phase has a greater effect on total exe-
cution time.
Effect of Graph Density: Connectivity of graphs
also influences the performance of substructure dis-
covery due to large number of substructures gener-
ated during expansion. We categorize graphs as dense
to sparse, where the number of vertices is fixed but
the number of edges vary along the spectrum ranging
from a completely connected graph to a very sparsely
connected graph. This experiment was performed on
a graph with 2K vertices, but varying densities from
Figure 15: Effect of graph density on response time.
25% (1M edges) to 100% (3.9M edges) on 4 layers
using 4 mapper nodes and 4 reducer nodes to see the
effect of connectivity of graphs on response time.
The results in Figure 15 show that with dense
graphs, where each vertex is connected to more ver-
tices on average, the computation cost increases as
there are more expansions which leads to more map
time and more combinations of intralayer edges in the
reducer contributing to more reduce time. This fur-
ther confirms that more time is spent in the reducer in
this algorithm as compared to the mapper.
KDIR 2024 - 16th International Conference on Knowledge Discovery and Information Retrieval
46

8 CONCLUSIONS
This paper proposes a scalable substructure discov-
ery algorithm for HoMLNs using the decoupling-
based strategy. A generic Map/Reduce algorithm
was introduced for the parallel processing of lay-
ers and then composing the results, again, using a
Map/Reduce framework. The basic components of
substructure discovery - substructure expansion, com-
bining substructures from each layer to generate sub-
structures spanning layers (composition function),
duplicate elimination, and counting isomorphic sub-
structures - were incorporated into the Map/Reduce
framework. Empirical correctness was established.
Extensive experimental analysis was performed on di-
verse synthetic and real-world graph datasets.
ACKNOWLEDGMENTS
This work was supported by NSF awards #1955798
and #1916084.
REFERENCES
Berenstein, A., Magarinos, M. P., Chernomoretz, A., and
Aguero, F. (2016). A multilayer network approach
for guiding drug repositioning in neglected diseases.
PLOS.
Boccaletti, S., Bianconi, G., Criado, R., del Genio, C.,
G
´
omez-Garde
˜
nes, J., Romance, M., Sendi
˜
na-Nadal,
I., Wang, Z., and Zanin, M. (2014). The structure and
dynamics of multilayer networks. Physics Reports.
Boden, B., G
¨
unnemann, S., Hoffmann, H., and Seidl, T.
(2012). Mining coherent subgraphs in multi-layer
graphs with edge labels. In Proceedings of the 18th
ACM SIGKDD International Conference on Knowl-
edge Discovery and Data Mining, KDD ’12, pages
1258–1266. ACM.
Bringmann, B. and Nijssen, S. (2008). What is frequent in
a single graph? In Pacific-Asia Conf. on Knowl. Disc.
and Data Mining (PAKDD), pages 858–863. Springer.
Cook, D. J. and Holder, L. B. (1993). Substructure dis-
covery using minimum description length and back-
ground knowledge. Journal of Artificial Intelligence
Research, 1:231–255.
Das, S. and Chakravarthy, S. (2015). Partition and con-
quer: Map/reduce way of substructure discovery. In
International Conference on Big Data Analytics and
Knowledge Discovery, pages 365–378. Springer.
Das, S. and Chakravarthy, S. (2018). Duplicate reduction in
graph mining: Approaches, analysis, and evaluation.
IEEE Trans. Knowl. Data Eng., 30(8):1454–1466.
De Domenico, M., Sol
´
e-Ribalta, A., G
´
omez, S., and Are-
nas, A. (2014). Navigability of interconnected net-
works under random failures. Proc. of Ntl. Acad. of
Sciences.
Domenico, M. D., Nicosia, V., Arenas, A., and Latora, V.
(2014). Layer aggregation and reducibility of multi-
layer interconnected networks. CoRR, abs/1405.0425.
Elseidy, M., Abdelhamid, E., Skiadopoulos, S., and Kalnis,
P. (2014). Grami: Frequent subgraph and pattern min-
ing in a single large graph. Proceedings of the VLDB
Endowment, 7(7):517–528.
Ketkar, N. S., Holder, L. B., and Cook, D. J. (2005). Sub-
due: Compression-based frequent pattern discovery in
graph data. In Proceedings of the 1st Int. Workshop on
open source data mining: frequent pattern mining im-
plementations, pages 71–76.
Kivel
¨
a, M., Arenas, A., Barthelemy, M., Gleeson, J. P.,
Moreno, Y., and Porter, M. A. (2013). Multilayer net-
works. CoRR, abs/1309.7233.
Leskovec, J. and Krevl, A. (2014a). LiveJournal - SNAP
Datasets: Stanford large network dataset collection.
http://snap.stanford.edu/data/com-LiveJournal.html.
Leskovec, J. and Krevl, A. (2014b). Orkut - SNAP Datasets:
Stanford large network dataset collection. http://snap.
stanford.edu/data/com-Orkut.html.
Liu, G. and Wong, L. (2008). Effective pruning techniques
for mining quasi-cliques. In Joint European confer-
ence on machine learning and knowledge discovery
in databases, pages 33–49. Springer.
Padmanabhan, S. and Chakravarthy, S. (2009). Hdb-
subdue: A scalable approach to graph mining. In
International Conference on Data Warehousing and
Knowledge Discovery, pages 325–338. Springer.
Pavel, H. R., Roy, A., Santra, A., and Chakravarthy, S.
(2023). Closeness centrality detection in homoge-
neous multilayer networks. In Proceedings of the 15th
International Joint Conference on Knowledge Discov-
ery, Knowledge Engineering and Knowledge Manage-
ment, IC3K 2023, KDIR.
Rao, R. B. and Lu, S. C. (1992). Learning engineering mod-
els with the minimum description length principle. In
AAAI, pages 717–722.
Santra, A., Bhowmick, S., and Chakravarthy, S. (2017a).
Efficient community re-creation in multilayer net-
works using boolean operations. In International Con-
ference on Computational Science, ICCS 2017, 12-14
June 2017, Zurich, Switzerland, pages 58–67.
Santra, A., Bhowmick, S., and Chakravarthy, S. (2017b).
Hubify: Efficient estimation of central entities across
multiplex layer compositions. In IEEE International
Conference on Data Mining Workshops.
Santra, A., Komar, K., Bhowmick, S., and Chakravarthy, S.
(2022). From base data to knowledge discovery – a
life cycle approach – using multilayer networks. Data
& Knowledge Engineering, page 102058.
Wang, W., Wang, C., Zhu, Y., Shi, B., Pei, J., Yan, X.,
and Han, J. (2005). Graphminer: a structural pattern-
mining system for large disk-based graph databases
and its applications. In Proceedings of ACM SIGMOD
2005, pages 879–881.
Yang, S., Yan, X., Zong, B., and Khan, A. (2012). Towards
effective partition management for large graphs. In
SIGMOD Conference, pages 517–528.
MLN-Subdue: Substructure Discovery In Homogeneous Multilayer Networks
47
