
Nanosensors for Soft Robotics Exoskeletons
Fredy A. Cuellar
1 a
, Juan C. Salcedo-Reyes
3 b
, Diana Montoya
3
, Catalina Alvarado-Rojas
1 c
and
Julian D. Colorado
1,2 d
1
School of Engineering, Pontificia Universidad Javeriana, Bogota, 110231, Colombia
2
Omics Science Research Institute, iOMICAS, Pontificia Universidad Javeriana, Cali 760031, Colombia
3
Laboratorio de Pel
´
ıculas Delgadas y Nanofot
´
onica, Departamento de F
´
ısica, Facultad de Ciencias,
Pontificia Universidad Javeriana, Bogota, 110231, Colombia
Keywords:
Piezoelectric Sensor, Robotic Exoskeletons, Neuromuscular Rehabilitation, Carbon-Based Nano-Inks,
Reduced Graphene Oxide, Biocompatibility, Wearable Healthcare Technologies, Mechanical Stress
Characterization, Therapeutic Applications.
Abstract:
This paper presents a multi-layered piezoelectric nanosensor designed for robotic exoskeletons, aimed at en-
hancing neuro-muscular rehabilitation. Green-driven methods were used to achieve biocompatibility throught
the incorporation of carbon-based nano-inks, reduced graphene oxide, and an optimized piezoelectric layer to
enhance electrical conductivity under mechanical stress. These components are integrated with a triboelectric
layer composed of a teflon-copper core. Electrical characterization tests demonstrate that the proposed sensor
exhibits robust performance and high reliability, both critical issues for hand grasping sensing under rehabili-
tation scenarios.
1 INTRODUCTION
The advent of robotic-driven neurological physiother-
apy has been significantly reducing recovery times
in rehabilitation scenarios. In particular, the pre-
cise actuation and sensing capabilities integrated in
robotic-based exoskeletons facilitate the mobility of
affected limbs through highly intense and repetitive
therapies. This enhances the precision of the treat-
ment and provides a straightforward method for gen-
erating quantitative data necessary for assessing pa-
tient progress. An important body of work in the
literature has demonstrated significant clinical-based
improvements in upper-limb mobility in post-stroke
patients, while using such robotic devices (Abdullah
et al., 2011).
Several devices have been specifically designed
for patients with hand motion impairments. These
devices include orthoses, exoskeletons, and terminal
effector devices (Mayer et al., 2022). Orthoses pro-
vide static support, whereas motorized exoskeletons
enable both passive and active therapeutic exercises
a
https://orcid.org/0009-0003-2261-1654
b
https://orcid.org/0000-0002-6209-0502
c
https://orcid.org/0000-0002-2315-5692
d
https://orcid.org/0000-0002-6925-0126
under the supervision of a physiotherapist (Jackson
and Abdullah, 2023). In general, exoskeleton con-
trol systems are organized into three hierarchical lev-
els: perception, control, and execution. This structure
facilitates precise responses based on data collected
from the environment, the device, and the user’s in-
teractions (Ne
ˇ
tukov
´
a et al., 2022).
The integration of precise sensing capabilities is
key to provide active assistance able to adapt to
the patient (Pan et al., 2023). In this arena, bio-
compatible nanosensors have opened new alternatives
for precise sensing with ease and flexible integration.
In this regard, nanosensors integrated into wearable
devices, such as gloves or exoskeletons, can provide
real-time feedback on hand grasping strength, pres-
sure distribution, and finger movement (Luo et al.,
2024). This level of detailed monitoring is crucial for
tailoring rehabilitation exercises to the specific needs
of the user, ensuring optimal recovery and function-
ality. Additionally, the incorporation of nanosensors
into these devices allows for the development of more
sophisticated control algorithms, which can improve
the accuracy and responsiveness of assistive technolo-
gies (Yang et al., 2024).
This paper reports the development of a bio-
nanosensor fabricated using green-based methods for
synthesizing nanomaterials, aimed at decreasing tox-
640
Cuellar, F. A., Salcedo-Reyes, J. C., Montoya, D., Alvarado-Rojas, C. and Colorado, J. D.
Nanosensors for Soft Robotics Exoskeletons.
DOI: 10.5220/0012906500003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 1, pages 640-644
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
Soft exoskeleton
(compliant joints)
Bio-nanosensor
Caracterización
Sustrato de nanocelulosa
Fabricación de (Nanoparticulas de cobre)
Se sintetizan nanopartículas de cobre de 30
nm mediante el uso de ácido ascórbico.
Estas nanopartículas se utilizan para crear la
siguiente capa, que se aplicará sobre el
sustrato y entrará en contacto con la capa
de óxido de grafeno reducido. De esta
manera, se logra la construcción de un
sensor piezorresistivo que emula los
mecanorreceptores de adaptación lenta.
Fabricación de Nanomateriales (óxido de grafeno reducido)
• El objetivo es la fabricación de un sensor diseñado para imitar mecanorreceptores en
aplicaciones de electromiografía. Este sensor consta de múltiples capas y utiliza
nanomateriales, y está destinado a aplicarse en la piel para detectar dichas señales.
• Los nanomateriales son desarrollados utilizando métodos verdes o de bio-fabricación
con el objetivo de disminuir la toxicidad y aumentar la biocompatibilidad para
aplicaciones en medicina, en las Figuras A, B, C se realiza la primera fase de óxido de
grafeno y en la figura C y E se realiza la fabricación de óxido de grafeno reducido.
Fabricación de Sensores Basados en
Nanomateriales para Aplicaciones en
Electromiografía y Detección de
Esfuerzo
La creciente demanda de tecnologías avanzadas en el campo de la medicina y la
ingeniería ha impulsado la búsqueda de sensores altamente sensibles y versátiles. En
este contexto, la incorporación de nanomateriales en la fabricación de sensores ha
emergido como una solución prometedora. Presentamos una investigación centrada en
el desarrollo de sensores basados en nanomateriales diseñados específicamente para
medir señales electromiográficas (EMG) y esfuerzo para su aplicación en la creciente
área de la robótica blanda (soft robotics). Estos sensores ofrecen una combinación única
de sensibilidad, flexibilidad y adaptabilidad, lo que los convierte en herramientas ideales
para la detección precisa de señales biológicas y su integración en sistemas de control en
la robótica blanda.
!
Facultad de Ingeniería, Pontificia Universidad Javeriana, Bogotá, Colombia
"
Departamento de Física, Pontificia Universidad Javeriana Bogotá, Colombia.
Fredy A. Cuellar
1
, Julián D. Colorado
1
,
Catalina Alvarado-Rojas
1
, Juan Carlos Salcedo Reyes
2
, Hernán
Rodríguez Hernández
2
Introducción
Métodos
Resultados
Conclusiones
Rector
Vicerrector Académico
Vicerrector del Medio Universitario
Secretario General
FACULTA D DE MED IC INA
Decana Académica
Decano del Medio Universitario
Directora de Carrera
Director de Posgrados
Secretaria de Facultad
Director General
Directores de Departamento
Directores de Instituto
Editor
Comité Editorial
Corrección de Estilo
Diseño, preprensa e impresión
La Revista Universitas Médica -
San Ignacio. Todo el material remitido es revisado por el Comité Editorial
sus autores.
Commons Reconocimiento 4.0 Internacional.
Rector
Vicerrector Académico
Vicerrector del Medio Universitario
Secretario General
FACU LTAD D E ME DICI NA
Decana Académica
Decano del Medio Universitario
Directora de Carrera
Director de Posgrados
Secretaria de Facultad
Director General
Directores de Departamento
Directores de Instituto
Editor
Comité Editorial
Corrección de Estilo
Diseño, preprensa e impresión
La Revista Universitas Médica -
San Ignacio. Todo el material remitido es revisado por el Comité Editorial
sus autores.
Commons Reconocimiento 4.0 Internacional.
Somos una sede que pertenece al Hospital
Universitario San Ignacio, vinculado con el Instituto
de Envejecimiento de la Facultad de Medicina de la
Pontificia Universidad Javeriana y otras unidades
académicas como el Departamento de Psiquiatría y
Salud Mental. Ofrecemos atención integral,
humana, segura y eficiente a personas con
problemas cognoscitivos del comportamiento y
deterioro funcional.
Evaluamos, entrenamos,
asesoramos a familiares y cuidadores para el
manejo del paciente en casa, así como para su
permanencia activa en la sociedad.
Robotic Exoskeleton for smart
rehabilitation
cognoscitiva.
Musicoterapia.
SEGUIMIENTO
CUIDADOS A LARGO PLAZO
Con la apertura de la nueva sede, tendremos
una Unidad con cobertura para pacientes que
requieran una larga estancia, ofreciendo
condiciones de vivienda dignas de alta calidad.
Tendremos servicios dirigidos al cuidado de
adultos y personas mayores, principalmente
con trastornos cognitivos, así como
alteraciones del comportamiento y la conducta,
con condiciones que les impidan continuar
viviendo en su hogar, para la asistencia y
seguimiento de sus comorbilidades.
Se indica la fabricación un sensor multifuncional utilizando nanomateriales para replicar
mecanorreceptores. Los nanomateriales se obtienen mediante métodos sostenibles y
biocompatibles, lo que los hace adecuados para aplicaciones médicas y de robótica
blanda. Ofrecen sensibilidad, flexibilidad y adaptabilidad, lo que los hace ideales para
detectar señales biológicas y controlar dispositivos de robótica blanda.
Sensores Señal EMG
Aplicación Soft para
rehabilitación
Microscopio
de Fuerza Atómica
Interdigitated electrode layout
Flexible fabric
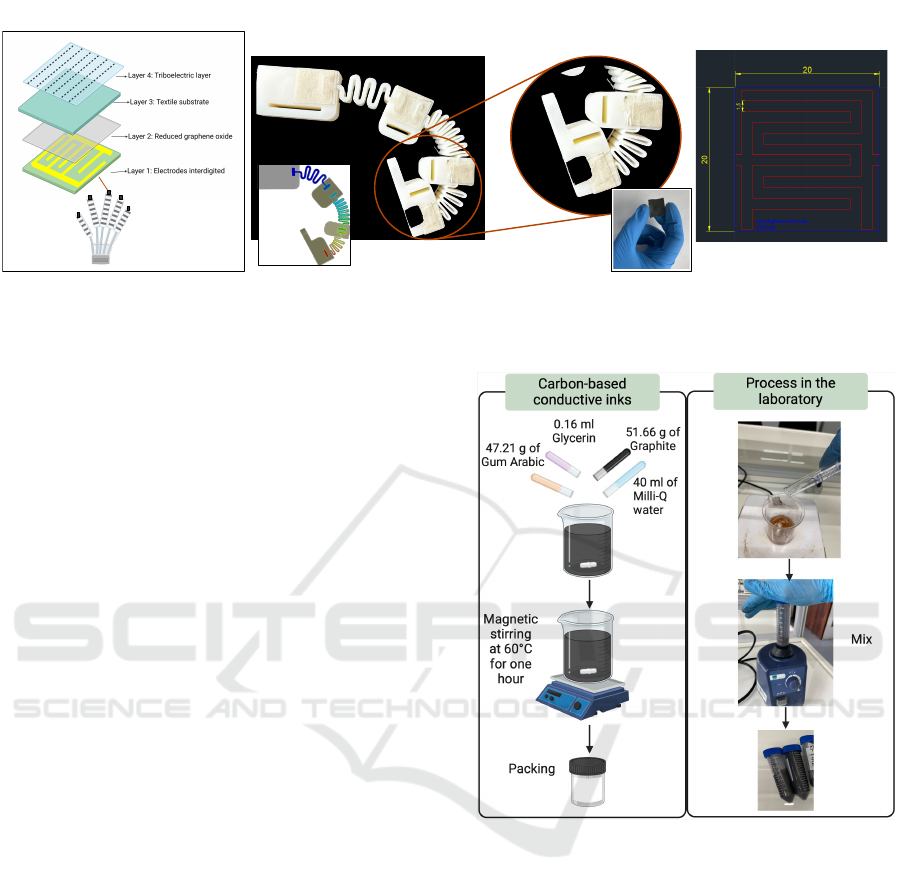
Figure 1: Bio-nanosensor design layers and integration with a hand-based soft robotic exoskeleton to support tactile pressure
sensing in grasping-driven rehabilitation.
icity and maximize its bio-compatibility with the hu-
man skin. The sensor has multiple layers to mimic cu-
taneous mechanoreceptors with piezoelectric and tri-
boelectric layers. Electrical characterization is pre-
sented, demonstrating the potential of these flexi-
ble sensing devices synthesized in a small footprint,
while providing accurate sensitivity and precision.
2 METHODS
Figure 1 depicts the multilayered architecture of the
sensor composed by 4 stacked layers. A flexible
fabric was used to allow proper integration with the
exoskeleton prototype developed in previous work
reported in (Bonilla et al., 2023). As shown, the
first two layers constitute the main piezoelectric sen-
sor. The interdigitated electrode structure, fabricated
through screen printing with carbon-based inks, im-
parts conductivity to the sensor.
A flexible textile substrate is employed, highlight-
ing the applicability of sustainable and flexible mate-
rials for wearable technology. This electrode is paired
with a layer of reduced graphene oxide, synthesized
using an environmentally friendly method, to improve
the sensor’s performance. The subsequent layer is a
triboelectric layer, integrated to enhance the sensor
with surface texturing capabilities, which are crucial
for exoskeletons designed for hand rehabilitation.
2.1 Piezoelectric Layer Fabrication
The fabrication process is described as follows:
• Substrate preparation: A flexible and durable tex-
tile substrate is selected for its suitability in wear-
able technologies.
Figure 2: Conductive ink manufacturing process.
• Electrode patterning: Interdigitated electrodes are
directly printed onto the textile substrate using
conductive carbon-based inks through the screen-
printing technique. This method allows precise
control over the electrode patterns and thick-
nesses. Figure 2 details the fabrication process of
these conductive inks, highlighting the formula-
tion and application steps involved.
• Graphene-oxide application: Reduced graphene
oxide, produced via an environmentally friendly
reduction process, is subsequently applied to the
interdigitated electrodes. This coating is crucial
for enhancing the piezoelectric properties of the
sensor. Figures 3 and 4, provide a detailed expla-
nation of the synthesis process for this nanomate-
rial.
Nanosensors for Soft Robotics Exoskeletons
641

Figure 3: Graphene oxide manufacturing process.
Figure 4: Reduced graphene oxide manufacturing process.
2.2 Triboelectric Layer Fabrication
The triboelectric layer comprises fine teflon fibers
with an embedded copper core. This specific structure
is selected to generate the triboelectric effect, with
Teflon providing the requisite triboelectric properties
and the copper core enhancing electrical conductivity
and overall layer effectiveness.
2.3 Assembly
All layers are carefully aligned in the correct order
and bonded using environmentally friendly biocom-
patible adhesives. This ensures both the biocompat-
ibility and functionality of the sensor. Proper align-
ment is critical to ensure cohesive performance when
integrated into the exoskeleton.
3 RESULTS
3.1 Conductive Inks Characterization
The electrical properties of inks applied to paper and
plastic substrates are crucial, significantly influencing
their suitability for flexible devices. To simulate re-
alistic usage conditions, the inks were bent and fixed
at angles of 180°, 120°, 90°, 45°, and 30°. Electrical
resistivity was measured using the four-point probe
method, and conductivity was subsequently calcu-
lated.
The four-point probe method is a widely accepted
technique for determining the electrical resistivity of
materials. It utilizes four aligned electrodes: the two
outer electrodes supply a constant current to the mate-
rial, while the two inner electrodes measure the volt-
age across them. This arrangement minimizes typical
errors due to contact resistance and the resistance of
the electrodes, ensuring accurate resistivity measure-
ments of the material under test (Ossila, 2024).
Figures 5 and 6 present the electrical properties of
the inks under bending for both substrates. The inks
exhibited no significant change in electrical properties
under bending, indicating their excellent adaptability
to mechanical deformations. This adaptability is vi-
tal for applications requiring high flexibility without
compromising electrical functionality. The robust-
ness and reliability of these conductive inks demon-
strate their potential for use in sensors and other flex-
ible electronic devices, where maintaining electrical
integrity is critical for overall functionality and per-
formance. These findings suggest that the design of
flexible electronic components can leverage the dura-
bility and reliability of these inks under various me-
chanical conditions.
The results demonstrate reliable stability of the
electrical conductivity of conductive inks deposited
on both paper and plastic substrates under various
bending conditions. In both cases, a slight increase
in conductivity is observed as the bending angle de-
creases from 180° to 30°. This trend indicates that
the ink maintains proper conductivity even under sig-
nificant mechanical deformation, which is crucial for
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
642

Figure 5: Conductivity on paper substrate.
Figure 6: Conductivity on plastic substrate.
applications involving flexible or foldable devices.
3.2 Electrical Characterization
Piezoelectric Layer
Figure 7 presents the sensing mechanism of the pro-
posed piezoresistive sensor layer. Unlike flat, hard,
and planar bulk metal layers, the coated textile lay-
ers exhibit pores and roughness. The contact area be-
tween the reduced graphene oxide-coated textile and
the bottom electrodes changes with variations in ex-
ternal pressure. When a compressive force is applied
to the sensor surface, the porous structures deform,
bringing the reduced graphene oxide-coated textile
into closer contact with the interdigital electrodes.
This deformation increases the number of con-
ducting pathways between the graphene oxide and the
carbon nano-ink electrodes, resulting in larger contact
areas and an enhanced current under applied voltage.
Upon unloading, the materials return to their orig-
inal states, reducing the available conduction path-
ways and consequently decreasing the current.
Electrical signal testing was conducted to evaluate
Figure 7: Current measurement configuration.
Figure 8: Measurement of voltage and current relationship
of the piezoelectric layer.
the sensing performance of the textile sensor devices.
As shown in Figure 8, the current-voltage (I-V) curves
of the piezoresistive sensor exhibit highly linear rela-
tionships under static pressure loading. This linearity
indicates that the rGO-coated textile and the carbon
nano-ink electrode textile form ohmic contacts. Ad-
ditionally, the piezoresistive sensor demonstrates high
sensitivity and reliability across a wide range of ap-
plied pressures.
Figure 8 shows the I-V characteristics of the
piezoresistive layer under various applied loads, with
pressures ranging from 1 to 23 kPa. The data were
obtained by measuring the current at different applied
pressures while varying the voltage from 0 to 0.5 V.
The I-V curves clearly show that an increase in volt-
age results in a corresponding increase in current for
all tested pressure levels.
The sensor’s sensitivity is evident from the in-
creasing slope of the I-V curves with higher applied
pressures. For instance, the curve for 1 kPa pres-
sure is relatively low compared to that for 23 kPa,
indicating a more significant response at higher pres-
sures. This feature highlights the sensor’s capability
to distinguish between varying magnitudes of pres-
sure, making it suitable for applications requiring pre-
cise pressure sensing. The linearity of the I-V curves
under each applied pressure confirms the formation
of ohmic contacts by the piezoresistive layer, which is
crucial for the reliability and repeatability of measure-
ments. This linearity also simplifies the calibration of
Nanosensors for Soft Robotics Exoskeletons
643

the sensor in real-world environments, facilitating the
integration of devices utilizing this technology. These
results validate the construction of the piezoresistive
sensor and its application in highly accurate and sen-
sitive pressure monitoring, which is essential for med-
ical devices and advanced robotic systems.
4 CONCLUSIONS
Multilayered piezoelectric sensors offer significant
potential for enhancing robotic exoskeletons used in
neuromuscular rehabilitation. The incorporation of
carbon-based nano-inks and reduced graphene ox-
ide makes these sensors environmentally friendly and
biocompatible, suitable for direct skin contact.
The piezoelectric and triboelectric layers of the
sensor are highly sensitive and capable of distinguish-
ing between different levels of applied pressure. Such
sensitivity is crucial for replicating the sophisticated
mechanoreceptive capabilities of human skin, thereby
enhancing the rehabilitative effectiveness of the ex-
oskeleton. Also, the electrical characterization of the
sensor demonstrates its viability under mechanical
deformation and stability in functional performance.
These are critical considerations for wearable tech-
nologies that must withstand various dynamic phys-
ical stresses. Additionally, the linear I-V characteris-
tics under applied pressures facilitate easier integra-
tion and calibration within exoskeleton frameworks,
broadening its utility in physio-therapeutic applica-
tions.Future research should focus on real-world test-
ing to assess the long-term durability of the sensor
and its integration with other biomedical monitoring
technologies.
ACKNOWLEDGEMENTS
This work was funded by the project “iREHAB: Sis-
tema inteligente de Rehabilitaci
´
on usando un Ex-
oesqueleto para recuperar Habilidad motora en dis-
capacidades post-ACV, usando se
˜
nales Biol
´
ogicas
del paciente” sponsored by The Ministry of Science
Technology and Innovation (MinCiencias), program
918-2022 under GRANT CTO: 622-2022, Award ID:
91805.
REFERENCES
Abdullah, H. A., Tarry, C., Lambert, C., Barreca, S., and
Allen, B. O. (2011). Results of clinicians using a ther-
apeutic robotic system in an inpatient stroke rehabil-
itation unit. Journal of NeuroEngineering and Reha-
bilitation, 8:50.
Bonilla, D., Bravo, M., Bonilla, S. P., Iragorri, A. M.,
Mendez, D., Mondragon, I. F., Alvarado-Rojas, C.,
and Colorado, J. D. (2023). Progressive rehabilitation
based on emg gesture classification and an mpc-driven
exoskeleton. Bioengineering, 10(7).
Jackson, G. and Abdullah, H. A. (2023). Development and
testing of a soft exoskeleton robotic hand training de-
vice. Sensors, 23:8395.
Luo, X., Tan, H., and Wen, W. (2024). Recent advances in
wearable healthcare devices: From material to appli-
cation. Bioengineering, 11:358.
Mayer, T. A., Harsch, A.-K., Koska, D., Hensel-Unger, R.,
and Maiwald, C. (2022). Effects of an active hand
exoskeleton on forearm muscle activity in industrial
assembly grips. Work, 72:1577–1591.
Ne
ˇ
tukov
´
a, S., Bejtic, M., Mal
´
a, C., Hor
´
akov
´
a, L., Kut
´
ılek,
P., Kauler, J., and Krupi
ˇ
cka, R. (2022). Lower
limb exoskeleton sensors: State-of-the-art. Sensors,
22:9091.
Ossila (2024). Calculate sheet resistance using the
four-probe method. https://www.ossila.com/pages/
sheet-resistance-theory. Accessed: 2 May 2024.
Pan, D., Hu, J., Wang, B., Xia, X., Cheng, Y., Wang, C.-
H., and Lu, Y. (2023). Biomimetic wearable sensors:
Emerging combination of intelligence and electronics.
Advanced Science, 10.
Yang, K., Zhang, S., Hu, X., Li, J., Zhang, Y., Tong, Y.,
Yang, H., and Guo, K. (2024). Stretchable, flexible,
breathable, self-adhesive epidermal hand semg sensor
system. Bioengineering, 11:146.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
644
