
Automated Design of a Genetic Algorithm for Image Segmentation Using
the Iterated Local Search
Thambo Nyathi
a
Department of Computer Science, University of Pretoria, Hatfield Campus, Pretoria, South Africa
Keywords:
Genetic Algorithm, Automated Design, Image Segmentation, Iterated Local Search.
Abstract:
Image thresholding is a fundamental technique used in image processing for segmentation. This is the process
of determining optimal thresholds for an image. When the number of thresholds exceeds two, that is, multi-
level thresholding, the computational complexity of the process increases exponentially. This has resulted in
the popularity of addressing this problem by using metaheuristic methods. However, metaheuristics are pa-
rameterised and their effectiveness depends on their configuration, which is often performed manually using
an iterative trial-and-error approach. This leads to less effective designs that yield less accurate thresholds
and longer design times. This study proposes using an Iterated Local Search to configure a low-level meta-
heuristic, namely, a Genetic Algorithm(GA), to solve the multilevel threshold problem. The performance of
the proposed approach was compared with that of a manually designed standard GA approach, and evaluated
using T2 weighted Magnetic Resonance images of the brain. Furthermore, the proposed approach is compared
with two other metaheuristic algorithms for the same problem. The results showed that the automatically de-
signed genetic algorithm significantly outperformed the standard genetic algorithm approach and the other two
algorithms on the set objective function. Although the runtimes were higher than those of the manual design
approach, better thresholds were obtained.
1 INTRODUCTION
Image segmentation is an essential process for image
analysis. It involves techniques used to partition an
image into distinct regions, with the hope that each
partitioned part belongs to a different object within
the image. Segmentation is prominent in facial recog-
nition and pedestrian detection among the numerous
image-processing techniques. Image segmentation
processes are predominantly preprocessing steps. Im-
age segmentation aims to simplify image data to en-
able ease of manipulation. Image thresholding is an
image-segmentation technique that separates an im-
age into two or more regions based on the intensity
values of the pixels. The most common thresholding
techniques are based on manipulating the histograms
of grayscale-level images (Amiriebrahimabadi et al.,
2024). Thresholding attempts to discriminate an ob-
ject from the background or other objects based on
the pixel intensity values of the object. There are
two approaches to thresholding: bi-level threshold-
ing and multilevel thresholding. The approaches are
a
https://orcid.org/0000-0003-4676-6063
categorised by the number of thresholds k. For bi-
level thresholding, there is one threshold (k=1), one
class is the range of pixel intensity values represent-
ing the object and the other representing the back-
ground. In multilevel thresholding, k > 1 and deter-
mining the optimal multilevel threshold value(s) is not
trivial (Abualigah et al., 2023).
Several techniques are used to determine opti-
mal threshold values for bi-level thresholding with
Otsu’s method (Ostu, 1979) and Kapur’s entropy
method (Kapur et al., 1985) being the most widely
used. These non-parametric exhaustive methods have
proved to be highly effective for bi-level threshold-
ing. However, as threshold levels increase beyond the
bi-level, Otsu and Kapur’s methods become computa-
tionally expensive. As a result, the use of metaheuris-
tic methods, specifically genetic algorithms (Holland,
1973) to solve multilevel thresholding problems has
gained prominence in recent years(Abualigah et al.,
2023). However, the effectiveness of metaheuristics
depends significantly on their configuration (Mart
´
ın-
Santamar
´
ıa et al., 2024). Therefore, this study pro-
poses automating the design of metaheuristics to
solve the multilevel thresholding problem. The pro-
Nyathi, T.
Automated Design of a Genetic Algorithm for Image Segmentation Using the Iterated Local Search.
DOI: 10.5220/0012908500003837
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Joint Conference on Computational Intelligence (IJCCI 2024), pages 189-196
ISBN: 978-989-758-721-4; ISSN: 2184-3236
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
189

posed approach uses the Iterated Local Search (ILS)
algorithm (Lourenc¸o et al., 2019) to search the de-
sign space for the best GA design that solves the MLT
problem. To demonstrate its effectiveness the pro-
posed approach used a threshold of ten T2-weighted
pulse sequences (Tsushima et al., 2003) Magnetic
Resonance brain images for k = 2,3 and 4. The results
are compared to a manually designed approach, the
results of the Particle Swarm Optimisation (Kennedy
and Eberhart, 1995), and a real number encoded ge-
netic algorithm obtained from the literature. The con-
tributions of this study are as follows:
• To propose a novel ILS approach to configuring
GAs that can be used to solve the MLT problem.
• To demonstrate that the proposed ILS approach
configures GAs more effectively than a manually
configured GA.
• To demonstrate that using ILS to search for GA
designs is beneficial and improves the results ob-
tained from the GA.
This paper is arranged as follows: Section 2 out-
lines the field of automated design. Section 3 presents
the multilevel thresholding problem, and Section 4 is
an outline of the GA. The Iterated Local Search is
presented in Section 5. Section 6 is the proposed ap-
proach followed by the experimental setup in Section
7 and the results in Section 8. The conclusion and
future research are outlined in Section 9.
2 AUTOMATED DESIGN OF
METHAHEURISTICS
The design of metaheuristics has long been viewed
as a combinatorial optimisation problem. It is still
driven by human expertise, which is influenced by
intuition and bias and is evaluated through trial-and-
error approaches (Mart
´
ın-Santamar
´
ıa et al., 2024). It
involves trial runs in which parameter values are it-
eratively changed. The parameter values that yield
the best objective value outputs are used in the fi-
nal configuration. The manual design search space
is usually restricted based on the experience of al-
gorithm designers. The development of automated
design techniques for metaheuristics is a specialized
field that aims to create or customize metaheuristic
algorithms for specific optimisation problems. The
goal is to enhance the efficiency of the design pro-
cess by automating some or all aspects of it, result-
ing in potentially more effective algorithms. The lit-
erature presents two approaches to automated design:
offline and online (Zhao et al., 2023). In offline ap-
proaches, the automated design process occurs inde-
pendently of the problem that needs to be solved. On-
line design involves the adaptation of a metaheuristic
during execution. Offline approaches are simpler to
implement and less computationally expensive (Zhao
et al., 2023). Several approaches for the configuration
of metaheuristics have been proposed, such as irace
(L
´
opez-Ib
´
a
˜
nez et al., 2016) and ParamsILS (Hutter
et al., 2007) although none have been widely adopted.
In its most basic form of automated design, an algo-
rithm is decomposed into its basic design components
and possible values, and placed at a low level. A de-
signer algorithm operates at a higher level and com-
bines different low-level components into a valid al-
gorithm. The designed algorithms are evaluated on
a problem, and the best-performing algorithm is pro-
posed as the solution.
In this study the automated design of a genetic al-
gorithm is proposed. Genetic algorithms are one of
the most popular evolutionary algorithms; thus, it is
not surprising that the automated design of GAs has
been previously proposed. In the earliest study on au-
tomating a GA, a GA was used at a higher level to
configure a lower-level GA (Grefenstette, 1986). Sub-
sequently, several studies have proposed using vari-
ous other algorithms to configure genetic algorithms.
Despite the potential benefits of automated design, it
is still an evolving field, and manual approaches may
outperform automated methods. The time and ef-
fort required to develop effective metaheuristics can
be significantly reduced using automated design tech-
niques. The high-level algorithm can also suffer from
the same design flaws as the low-level algorithm. In
this study, we propose using an Iterated Local Search
algorithm as the high-level algorithm. The ILS algo-
rithm replaces an algorithm designer and searches in
a search space of GA designs. This algorithm has the
advantage of being simple to implement. ILS has a
low computational cost and very few parameters to
configure. The next section reviews the multilevel
thresholding problem.
3 MULTILEVEL
THRESHOLDING
Multilevel thresholding is a systematic way of
segmenting a greyscale image I into k+1 subre-
gions/classes. In this case k thresholds are required
and are defined as {t
1
,t
2
,t
3
,.....,t
k
}.
c
0
= g(x, y) ∈ I|0 ≤ g(x, y) ≤ t
1
− 1 (1)
c
1
= g(x, y) ∈ I|t
1
≤ g(x, y) ≤ t
2
− 1 (2)
c
k
= g(x, y) ∈ I|t
k
≤ g(x, y) ≤ L − 1 (3)
ECTA 2024 - 16th International Conference on Evolutionary Computation Theory and Applications
190

In Equations 1, 2 and 3 c
k
represents the k
th
sub-
region, while L represents the number of greyscale
levels. This problem involves searching for the best
threshold values within the space of thresholds in the
range of 0 - L. This is an NP problem and the use of
exact methods leads to the search complexity growing
exponentially as the number of thresholds increases as
O(L
k−1
). The effectiveness of the determined thresh-
olds is generally evaluated by minimizing or max-
imizing an objective function. While Kapur’s en-
tropy and Otsu’s methods are primarily used for bi-
nary thresholding, with modifications, they can both
be extended to multilevel thresholding. This study
used Kapur’s method as the objective function be-
cause of its calculation speed. The objective is to
achieve optimal class separation by maximizing intra-
class entropy and minimizing inter-class information
leakage. The Kapur’s entropy can be extended for the
MLT problem as follows: If k values from the follow-
ing threshold values {t
1
,t
2
,t
3
,.....,t
k
} dissect the image
into distinct regions. The probability p
i
can be defined
as:
p
i
=
h(i)
∑
L−1
i=0
h(i)
(4)
where h(i) represents the grey scale level and
∑
L−1
i=0
h(i) is the total number of pixels, while L is the
number of levels. Kapur’s entropy is given as follows:
f (t
1
,t
2
, .....t
n
) = H
0
+ H
1
+ ..... + H
k
(5)
To evaluate multilevel problems Kapur’s entropy
is extended as follows.
H
0
= −
∑
t
1
−1
i=0
p
i
ω
0
ln
p
i
ω
0
, where ω
0
=
∑
t
1
−1
i=0
p
i
(6)
H
k
= −
∑
L−1
i=t
k
p
i
ω
k
ln
p
i
ω
k
, where ω
k
=
∑
L−1
i=k
p
i
(7)
Numerous metaheuristics have been employed to
solve the multilevel thresholding problems. In a
recent survey (Amiriebrahimabadi et al., 2024) de-
scribes the use of evolutionary algorithms such as
genetic algorithms. In the early years, metaheuris-
tics were commonly used independently; however, to
improve performance, the latest approaches employ
hybridised metaheuristics (Amiriebrahimabadi et al.,
2024).
The next section reviews genetic algorithms.
4 GENETIC ALGORITHMS
Algorithm 1 outlines a genetic algorithm.
Genetic Algorithms have been widely applied in
multilevel thresholding owing to their computational
Data: Population P, Fitness function F,
Crossover rate p
c
, Mutation rate p
m
Result: Optimal solution
Initialize population P;
Evaluate the fitness of each individual;
while termination condition not met do
Select parents for crossover;
Apply crossover with probability p
c
;
Apply mutation with probability p
m
;
Evaluate the fitness of new individuals;
Update the population;
end
return best individual from final population;
Algorithm 1: Genetic Algorithm (Holland, 1973).
efficiency. When applied to MLT problems, inte-
ger encoding is the most commonly used encoding
method (Manikandan et al., 2014). Each individual
is a complete solution to an MLT problem, in which
each gene is an integer that represents a threshold.
The general mode of operation of most techniques
that employ GAs begins by generating random thresh-
olds. The thresholds are iteratively adjusted using
variation operators to improve the objective function.
Genetic algorithms have been used to threshold mag-
netic resonance brain scan images(Manikandan et al.,
2014). Binary encoding has been used to thresh-
old a subset of benchmark problems (de Oliveira and
Yamanaka, 2018). Studies in the literature employ
a wide range of population sizes. Ranging from a
population size of 20 and 30 (de Oliveira and Ya-
manaka, 2018). Fitness proportionate and tourna-
ment selections are the most commonly used parent
selection methods. Otsu’s and Kapur’s methods are
the most commonly used fitness functions. The most
commonly applied variation operators are crossover
and mutation operators. Single-point crossover has
been widely used at a rate of 10%. Another widely
used crossover method is simulated binary crossover
(SBX) (Manikandan et al., 2014). A study (Sun
et al., 2016) used fitness proportionate selection and
discrete mutation as genetic operators to threshold
benchmark images at levels 2,3,4 and 5, using Otsu
and Kapur’e entropy as fitness functions. In the fol-
lowing study, 100 generations were set as the ter-
mination criteria. Most studies (Hammouche et al.,
2008) have used the generational approach to update
the population. In that study, a population size of 100
was used, with Kapur entropy configured as the fit-
ness function. Single point crossover was used at a
rate of 90% and mutation rate of 1%. In another study
(Abbasgholipour et al., 2011), a GA was used to solve
the thresholding problem by using string encoding
with a population size of 12. Tournament selection
Automated Design of a Genetic Algorithm for Image Segmentation Using the Iterated Local Search
191

was performed, using, a tournament size of 4. Single
point crossover (80%), mutation (16%), and 400 gen-
erations were the termination criteria. Medical image
segmentation is an important area where threshold-
ing algorithms are applied such as a study (Manikan-
dan et al., 2014) where a GA was used to threshold
the MRI brain scan images using real number encod-
ing. Simulated binary crossover (SBX) was applied
at a probability rate of 80% and mutation probability
rate of 1 %. A population size of 50 was used and
the termination criteria was 10000 generations. Vari-
ations in GAs for solving the MLT problem can also
be found in the literature (Lai and Tseng, 2004).
5 ITERATED LOCAL SEARCH
Iterated Local Search is a metaheuristic algorithm
which is effective at solving a wide range of optimi-
sation problems. It involves three steps: perturbation,
local search and evaluation of an acceptance criterion.
Data: Initial solution s
0
, perturb function N,
Iteration limit T
Result: Improved solution
s
best
← s
0
;
s
′
← s
0
;
t ← 0;
while t < T do
s
′
← perturb(s
′
) ; // Generate a
neighbour solution
s
′
← localSearch(s
′
) ; // Apply local
search to s
′
if fitness(s
′
) > fitness(s
best
) then
s
best
← s
′
;
end
t ← t +1;
end
return s
best
;
Algorithm 2: Iterated Local Search (Lourenc¸o et al.,
2003).
Algorithm 2 presents the outline of the ILS algo-
rithm. The algorithm begins by creating a random ini-
tial solution s
0
using a constructive heuristic. The al-
gorithm then goes through a cycle of applying three
operators, perturbation, local search, and acceptance
criteria, until a stopping criterion is achieved. Pertur-
bation accepts a solution and makes changes that be-
come new starting points of the local search. This en-
ables the ILS to escape local optima (Lourenc¸o et al.,
2003). In the next step, a local search is applied to
the initial solution. This involves searching the neigh-
bourhood of the current solution, in this case s’, by
making small changes to s’. The acceptance criterion
determines whether a new solution should replace the
current optimal solution.
5.1 Automated Design Using Iterated
Local Search
Previous studies have shown that an ILS algorithm
effectively configures other algorithms. In one of
the earliest uses of ILS as an algorithm configura-
tor, (Hutter et al., 2007) proposed an approach called
ParamsILS. This approach was used to configure four
algorithms and was shown to outperform the man-
ually configured algorithms. Variants of ParmaILS,
namely BasicILS and FocusedILS, have been pro-
posed. A concise review of the applications of the
ILS algorithm is presented in (Lourenc¸o et al., 2019).
6 PROPOSED APPROACH
The challenge of designing an evolutionary algorithm
that can achieve optimal performance in solving the
multilevel thresholding problem involves finding a
design that can balance exploration and exploitation
effectively. To achieve this, an ILS algorithm was
used to search the configuration space of the GA. The
proposed approach was based on the ILS algorithm
presented in Section 5. The first step of the ILS for
the GA, herein termed ILSGA, was to create an ini-
tial solution s
0
. An initial solution was randomly cre-
ated from the GA design components, as presented
in Table 1. An ILSGA solution was represented as a
chromosome of nine genes. Each gene (G) represents
a design decision as specified in Table 1.
Table 1: GA Design Decisions.
G Parameter Range of Possible Values
0 popSize 50–200
1 selection 0-tourn,1-fit prop, 2- rank
2 crossover 0-1point,1-SBXT, 2-BLXT
3 crossrate 0-100%
4 mutation 0-bit flip, 1- gauss, 2-cauchy
5 mutrate 0-100%
6 termination 50-150
7 control flow 0 – none, 1- create
8 init 0 – random, 1- sensible
The first column indexes the design-decision
genes of the genetic algorithm. The second column
describes the design decisions. Column 3 presents
the range of possible values for each design deci-
ECTA 2024 - 16th International Conference on Evolutionary Computation Theory and Applications
192

sion. Each range of values represents the values
found in the literature commonly used to configure
a GA. Gene 0 determines the GA population size
from within the range of 50 to 200. Gene 1 spec-
ifies the parent selection method from one of three
possible methods i.e. tournament selection, fitness
proportionate and rank selection. Gene 2 is used
to determine the crossover operator. Three options
are available: 0-uniform crossover, 1-Simulated Bi-
nary Crossover (SBX, eta = 0.2, mu = rand(0,1), and
2- Blend Crossover (BLX, alpha =0.5) (Manikandan
et al., 2014). Gene 3 specifies the crossover rate, and
gene 4 specifies the mutation operator. Gene 4 options
are uniform mutation, gaussian mutation and Cauchy
mutation(Rudolph, 1997). The mutation rate is speci-
fied by gene 5. Gene 6 determines the number of gen-
erations, which is also the termination criterion from
a value of 50 to 200. Gene 7 specifies the control flow
of the GA. If this gene is configured to be a value of
0, the evolution of the GA runs normally; however,
if it is configured to a value of 1, the algorithm will
abruptly create a new population at a random point
during the run. This behaviour allows the algorithm
to escape a local optimum. Gene 8 determines the
starting position of the algorithm. If the gene is set
to 0, the thresholds of the initial population are ran-
domly selected from the range of 0 – 255. If the gene
is set to a value of 1, bounded sensible initialisation is
used for example, for a 2-level threshold GA individ-
ual, the two thresholds are randomly obtained from
bounded ranges as follows: threshold one 0-127 and
threshold two 128-255.
6.1 Iterated Local Search Genetic
Algorithm- ILSGA
An initial ILSGA solution is randomly created from
a range of possible values. The ILSGA solution is
a GA configuration used to solve the MLT problem.
Kapur’s entropy presented in Section 3 was used as
the fitness function of the underlying GA, which was
subsequently used as the objective function of the
ILSGA. The initial solution is used to configure a GA
applied to an MLT problem, and the fitness value of
the best-performing GA is assigned to the ILSGA as
its objective value. A local search was then conducted
on the ILSGA solution. The number of neighbours
considered was randomly selected from 2 to 9. In
this study, a neighbour was considered as a single al-
teration to any of the nine genes of an ILSGA solu-
tion, without considering the value of the gene in the
change. The algorithm may consider two or all nine
neighbours. The selected neighbouring solution was
applied to the MLT problem. The acceptance criterion
used was the improving only criterion (Best(s,s”))
and is given by Equation 8:
s = Best(s, s”) = s”if f (s”) > f (s)else = s (8)
Where f(s) is the objective function. The best-
performing becomes the new solution. Therefore, a
new ILSGA solution is accepted only if it outperforms
the current solution. After this step, a perturbation
was applied. The perturbation operator mutates one
or more genes in the solution. This perturbed solution
becomes the new starting point for the local search.
This cycle was continued for a fixed number of itera-
tions until convergence was achieved.
7 EXPERIMENTAL SETUP
To evaluate the effectiveness of the proposed ap-
proach ten T2-weighted MRI images obtained from
the Harvard Medical School web-based medical im-
age repository were used as test images specifically
Slices 22,32,42,52,62,72,82,92,102 and 112. Six ex-
periments were conducted for each of the ten images.
A manually designed standard GA was used to es-
tablish 2-level, 3-level and 4-level thresholds. Simi-
larly, the ILSGA algorithm was applied to solve for
the 2-level, 3-level and 4-level thresholds. To estab-
lish the parameter values for each threshold level for
the standard GA design, test runs were conducted us-
ing values from the literature as the starting points.
An iterative trial-and-error parameter tuning approach
was applied until the best-performing set of parame-
ters, based on the test runs, was established. These
are presented in Table 2
The simulations were conducted at the Centre for
High-Performance Computing (CHPC) Lengau Clus-
ter. Java 1.8 was used as the software development
platform on the Netbeans 8.1 Integrated Development
Environment.
Table 2: Standard GA Parameters.
Param 2T 3T 4T
Popsize 200 200 200
Selection Tourn Tourn Tourn
Tourn size 8 10 10
Crossover 1-point 1-point Uniform
Crossrate 0.85 0.80 0.70
Mutation Random Random Uniform
MutRate 0.25 0.30 0.25
Termination 200 200 200
Automated Design of a Genetic Algorithm for Image Segmentation Using the Iterated Local Search
193
Table 3: Kapur’s Entropy Results.
Im T ILSGA SGA PSO RGA Im T ILSGA SGA PSO RGA
22 2 11.1665 11.1665 9.2136 9.2155 72 2 11.5713 11.5707 9.4163 9.4205
3 14.3145 14.3145 11.3290 11.7333 3 14.5270 14.5227 11.4144 11.6935
4 17.1510 17.1387 13.5003 13.9555 4 17.3750 17.3257 13.5094 13.8463
32 2 11.3694 11.3694 9.2617 9.2645 82 2 11.3492 11.3492 9.1847 9.1910
3 14.4216 14.4209 11.3367 11.6835 3 14.3630 14.3612 11.0248 11.4269
4 17.3015 17.3038 13.4849 13.9406 4 17.1757 17.1531 13.2558 13.5191
42 2 11.4938 11.4916 9.2568 9.2585 92 2 10.6614 10.6612 8.7750 8.7906
3 14.4656 14.4641 11.3036 11.5779 3 13.5962 13.5763 10.6335 11.1640
4 17.3378 17.3291 13.5556 13.865 4 16.3146 16.2432 12.9568 13.2974
52 2 11.3897 11.3888 9.2433 9.2447 102 2 10.3586 10.3586 8.5127 8.5283
3 14.4421 14.4390 11.2299 11.5795 3 13.4379 13.4335 10.6913 10.9277
4 17.2938 17.2021 13.3646 13.7502 4 16.1471 16.1337 12.5920 13.1320
62 2 11.4731 11.4717 9.3073 9.3367 112 2 9.7462 9.7462 8.1308 8.1476
3 14.5211 14.4960 11.3313 11.6745 3 12.6918 12.6776 10.0312 10.6029
4 17.3975 17.3223 13.4960 13.7812 4 15.7416 15.7128 12.3148 13.0591
Table 4: Image Thresholds.
Image T ILSGA GA PSO RGA
Slice 22 2 95,177 95,177 97,184 96,184
3 61,115,178 61, 115, 229 69,138,207 58,115,185
4 56 ,108 ,159 ,189 58 ,113, 182, 246 83,116,175,207 44,87,131,186
Slice 32 2 110,185 110, 185 107,185 109,185
3 56 ,115 ,185 60, 118 ,247 74,157,192 53,116,185
4 56 ,114 ,175 ,207 55,113,230,250 95,125,164,194 39,84,131,189
Slice 42 2 112 ,182 113, 182 111,183 114,183
3 83 ,130 ,183 83,131,222 80,148,178 84,132,187
4 76 ,120 ,169 ,214 58,112,236,250 81,125,164,197 30,75,127,188
Slice 52 2 118,181 120,181 119,186 118,185
3 112 ,167 ,204 111,167,237 89,113,187 109,165,203
4 92 ,128 ,170 ,205 82, 122, 182, 248 79,111,141,208 91,131,174,209
Slice 62 2 120,182 119,183 109,186 121,187
3 110 ,166 ,213 115,162,205 112,167,187 101,147,196
4 98 ,136 ,176 ,213 87,127,151,235 85,134,180,203 94,134,175,211
Slice 72 2 116,175 118,177 116,177 117,179
3 98 ,139 ,184 97,140,233 96,178,207 99,141,187
4 96,133 ,174 ,212 98,139,151,213 96,124,161,187 99,140,179,213
Slice 82 2 113,173 113,173 110,170 111,169
3 109 ,158 ,203 109,158,225 103,136,198 103,146,190
4 98 ,134 ,173 ,213 95,138,190,192 100,129,167,188 98,133,169,210
Slice 92 2 108,168 109,168 109,175 109,174
3 102 ,144 ,186 98,146,242 115,134,178 94,142,190
4 98 ,135 ,168 ,199 105, 139,170, 230 77,107,149,194 97,136,173,211
Slice 102 2 114,168 114, 168 98,166 107,174
3 95 ,142 ,186 95, 142, 242 113,145,180 94,142,190
4 91 ,131 ,164 ,201 90,125,128,248 84,124,165,189 1,63,120,174
Slice 112 2 100,150 100, 150 109,162 106,163
3 94 ,135 ,173 94, 138, 247 104,163,216 1,70,142
4 6 ,62 ,122 ,169 5, 56, 209, 233 63,130,153,206 1,65,123,172
ECTA 2024 - 16th International Conference on Evolutionary Computation Theory and Applications
194
8 RESULTS
Table 3 presents the performance results of the
four algorithms using Kapur’s entropy as a metric.
Columns 1 and 7 present the image problem in-
stances. Columns 2 and 8 present the thresholds
considered 2,3 and 4, respectively. The remaining
columns present the algorithms used in this study.
Columns 3 and 9 show the results obtained by the
ILS GA and columns 4 and 10 show the results of the
standard GA. The results of two algorithms, namely
PSO and the real genetic algorithm (RGA), applied to
the same images obtained from (Manikandan et al.,
2014) are also presented. Columns 5 and 11 show
the PSO results and columns 6 and 12 show the RGA
results. The best result from 30 independent runs is
reported for each image for each of the three thresh-
old levels considered for the ILSGA and SGA algo-
rithms. From the results across all images, on the 2-
level thresholds, the ILSGA algorithm performed bet-
ter than SGA on five images and equivalently on the
other five images. On the 3-level thresholds, ILSGA
performed better on nine images and equivalently on
one image, slice22. On the 4-level thresholds, the
ILS GA algorithm performed better on nine images
and worse on slice 32. From the presented values, the
ILSGA and SGA algorithms perform better than the
PSO and RGA algorithms reported in the literature.
However, this assertion is cautionary, as differences
in experimental settings and image sizes may lead to
disparities in the results. Table 4 presents the thresh-
old values achieved for each image by each algorithm
at the considered threshold level. An analysis of the
threshold values revealed that the values obtained for
the 2-level threshold were almost identical across all
algorithms. For the 3-level and 4-level thresholds, the
differences are wider than for the 2-level but the val-
ues are within the same range. To evaluate the sig-
nificance of the differences in performance between
ILSGA and SGA, the Wilcoxon rank sum test at a 5%
significance level was used (Wilcoxon, 1992). The
differences in performance were found to be signifi-
cant where ILSGA performed significantly better than
the standard GA approach.
Table 5 presents a sample of GA designs that were
evolved using the ILSGA algorithm. The first and
second columns show the image and threshold lev-
els, respectively. The third column presents the pa-
rameters of the GA design, as listed in Table 1. The
numbers in brackets indicate the number of times the
ILS algorithm accepts a new set of parameters. The
fourth column shows the design time (in millisec-
onds). For example, in the first row for the image
slice 22 2-level threshold, the population size is 77
Table 5: ILSGA Designs.
Im T GA Design Time
22 2 77,1,2,60,0,10,87,1,0 (4) 18721
3 152,1,2,70,2,20,119,1,1 (12) 58341
4 99,2,1,80,1,10,102,1,0 (4) 51656
62 2 159,2,0,30,0,80,98,1,0 (3) 65154
3 189,1,0,20,0,60,144,1,1 (6) 47705
4 77,2,2,80,1,50,51,0,1 (6) 56301
102 2 172,0,2,50,2,10,120,1,0 (3) 60953
3 184,1,1,30,2,20,144,0,1 (5) 57887
4 179,0,2,50,2,40,153,1,1(5) 54139
and the fitness proportionate is selected as the selec-
tion method. The crossover operator is set to BLXT
at a probability rate of 60%. A bit-flip mutation was
applied at a probability rate of 10 %. ILSGA was ap-
plied for 87 iterations. The process runs for 18721
milliseconds and four perturbations were accepted as
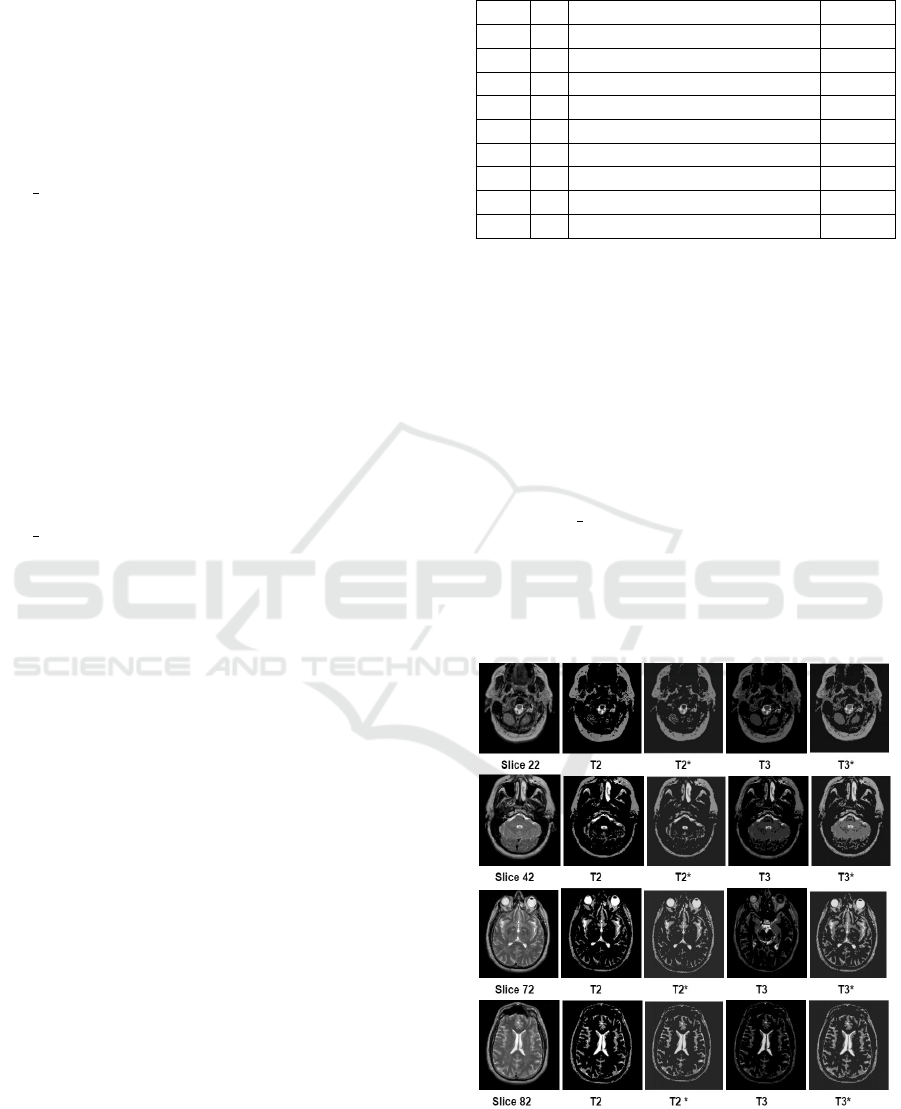
new solutions. Figure 1 shows a visual illustration of
the comparison between thresholded MRI images and
those obtained from (Manikandan et al., 2014). The
first row refers to slice 22. T2 is the output of the 2-
level thresholding while T3 is the 3-level thresholding
from the ILS GA. Images labelled T2* and T3* were
extracted from (Manikandan et al., 2014). It can be
seen that there are slight differences between those
obtained from the ILSGA and those obtained from
(Manikandan et al., 2014). This is in line with the
obtained objective function values.
Figure 1: Comparison of Segmented Images.
Automated Design of a Genetic Algorithm for Image Segmentation Using the Iterated Local Search
195

9 CONCLUSION AND FUTURE
WORK
This study proposes an automated genetic algorithm
design using an Iterated Local Search algorithm ap-
proach. The effectiveness of the proposed approach
was evaluated using T2-weighted axial brain MR.
The automated design-evolved GA achieved better re-
sults on the objective function metric than the stan-
dard manually designed GA. The automated design
of metaheuristics has proven to be effective in the ma-
jority of problem domains where metaheuristics have
achieved success. The purpose of this study was to
evaluate the efficacy of an automated design in the do-
main of image segmentation, specifically multilevel
thresholding. Additionally, the design time of the GA
is less than that of the manual approach, which can
range from one day to several days as the search space
of parameter values is very wide. Future work will in-
volve a comparative analysis between ILS and a more
complex algorithm. The use of an algorithm more
complex than ILS may achieve better results since the
ILS searches in the locality of an initial solution and
can be vulnerable to local optimal. Additionally, con-
sideration of a larger number of specimen images will
be investigated.
REFERENCES
Abbasgholipour, M., Omid, M., Keyhani, A., and Mo-
htasebi, S. S. (2011). Color image segmentation with
genetic algorithm in a raisin sorting system based on
machine vision in variable conditions. Expert Systems
with Applications, 38(4):3671–3678.
Abualigah, L., Almotairi, K. H., and Elaziz, M. A. (2023).
Multilevel thresholding image segmentation using
meta-heuristic optimization algorithms: Comparative
analysis, open challenges and new trends. Applied In-
telligence, 53(10):11654–11704.
Amiriebrahimabadi, M., Rouhi, Z., and Mansouri, N.
(2024). A comprehensive survey of multi-level thresh-
olding segmentation methods for image processing.
Archives of Computational Methods in Engineering,
pages 1–51.
de Oliveira, P. V. and Yamanaka, K. (2018). Image seg-
mentation using multilevel thresholding and genetic
algorithm: An approach. In 2018 2nd international
conference on data science and business analytics
(ICDSBA), pages 380–385. IEEE.
Grefenstette, J. J. (1986). Optimization of control param-
eters for genetic algorithms. IEEE Transactions on
systems, man, and cybernetics, 16(1):122–128.
Hammouche, K., Diaf, M., and Siarry, P. (2008). A mul-
tilevel automatic thresholding method based on a ge-
netic algorithm for a fast image segmentation. Com-
puter Vision and Image Understanding, 109(2):163–
175.
Holland, J. H. (1973). Genetic algorithms and the opti-
mal allocation of trials. SIAM journal on computing,
2(2):88–105.
Hutter, F., Hoos, H. H., and St
¨
utzle, T. (2007). Auto-
matic algorithm configuration based on local search.
In Aaai, volume 7, pages 1152–1157.
Kapur, J. N., Sahoo, P. K., and Wong, A. K. (1985). A new
method for gray-level picture thresholding using the
entropy of the histogram. Computer vision, graphics,
and image processing, 29(3):273–285.
Kennedy, J. and Eberhart, R. (1995). Particle swarm opti-
mization. In Proceedings of ICNN’95-international
conference on neural networks, volume 4, pages
1942–1948. ieee.
Lai, C.-C. and Tseng, D.-C. (2004). A hybrid approach
using gaussian smoothing and genetic algorithm for
multilevel thresholding. International Journal of Hy-
brid Intelligent Systems, 1(3-4):143–152.
L
´
opez-Ib
´
a
˜
nez, M., Dubois-Lacoste, J., C
´
aceres, L. P., Bi-
rattari, M., and St
¨
utzle, T. (2016). The irace package:
Iterated racing for automatic algorithm configuration.
Operations Research Perspectives, 3:43–58.
Lourenc¸o, H. R., Martin, O. C., and St
¨
utzle, T. (2003). It-
erated local search. In Handbook of metaheuristics,
pages 320–353. Springer.
Lourenc¸o, H. R., Martin, O. C., and St
¨
utzle, T. (2019). Iter-
ated local search: Framework and applications. Hand-
book of metaheuristics, pages 129–168.
Manikandan, S., Ramar, K., Iruthayarajan, M. W., and
Srinivasagan, K. (2014). Multilevel thresholding
for segmentation of medical brain images using real
coded genetic algorithm. Measurement, 47:558–568.
Mart
´
ın-Santamar
´
ıa, R., L
´
opez-Ib
´
a
˜
nez, M., St
¨
utzle, T., and
Colmenar, J. M. (2024). On the automatic genera-
tion of metaheuristic algorithms for combinatorial op-
timization problems. European Journal of Opera-
tional Research.
Ostu, N. (1979). A threshold selection method from gray-
level histograms. IEEE Trans SMC, 9:62.
Rudolph, G. (1997). Local convergence rates of sim-
ple evolutionary algorithms with cauchy mutations.
IEEE Transactions on Evolutionary Computation,
1(4):249–258.
Sun, G., Zhang, A., Yao, Y., and Wang, Z. (2016). A
novel hybrid algorithm of gravitational search algo-
rithm with genetic algorithm for multi-level threshold-
ing. Applied Soft Computing, 46:703–730.
Tsushima, Y., Aoki, J., and Endo, K. (2003). Brain mi-
crohemorrhages detected on t2*-weighted gradient-
echo mr images. American journal of neuroradiology,
24(1):88–96.
Wilcoxon, F. (1992). Individual comparisons by ranking
methods. In Breakthroughs in statistics: Methodology
and distribution, pages 196–202. Springer.
Zhao, Q., Duan, Q., Yan, B., Cheng, S., and Shi, Y. (2023).
Automated design of metaheuristic algorithms: A sur-
vey. Transactions on Machine Learning Research.
ECTA 2024 - 16th International Conference on Evolutionary Computation Theory and Applications
196
