
RARN: Lightweight Deep Residual Learning with Attention for
Human Emotions Recognition
Zhenyuan Zhu
a
Master of Professional Study in Data Science, University of Auckland, Auckland, New Zealand
Keywords: Emotion Recognition, Rotation-Aware Residual Network, Facial Expressions, Convolutional Neural Networks.
Abstract: Human emotion identification represents a formidable challenge within computer vision research. This study
endeavours to classify human emotions across seven discrete categories: anger, disgust, fear, happiness,
neutral, sadness, and surprise. To address this challenge, this paper introduces the Rotation-Aware Residual
Network (RARN), a novel framework leveraging convolutional neural networks (CNNs) and spatial attention
mechanisms. Notably, this approach is designed to excel in accurately discerning facial emotions amidst
complex real-world contexts. Experimental validation conducted on the FER-2013 Dataset underscores the
efficacy of our proposed model, demonstrating notable improvements in emotion recognition accuracy.
Crucially, the Rotation-Aware Residual Network's innovative integration of multi-scale fusion and angle-
sensitive spatial attention modules underscores its unique capacity to capture nuanced facial expressions. This
breakthrough has significant implications for diverse applications, including human-computer interaction,
psychological health assessment, and social signal processing. Moving forward, future research endeavours
will focus on further refining the network architecture and expanding the diversity of datasets to enhance the
model's performance across various scenarios.
1 INTRODUCTION
Automatic facial expression analysis is widely used
in computer vision for many applications, such as
emotion prediction, expression retrieval, and image
album summarization, and has been extensively
studied (He, 2016)(Szegedy, 2017)(Zhou, 2023). The
generalised classification model categorises emotion
detection into happiness, sadness, fear, fury, disgust,
and surprise. These categories are established to
streamline the identification and description process
through common terminology. The universality
hypothesis of emotion (Ekman, 1969) is widely used
in emotional computing research due to its simplicity
and universality, making it the preferred theory. The
implementation of mobile and embedded computing
requires not just stronger hardware, more datasets,
and more complex models for autonomous facial
expression analysis but also network topologies that
are efficient in terms of power consumption and
memory utilisation (Szegedy, 2017).
The most straightforward strategy to enhance the
effectiveness of deep neural networks is to increase
a
https://orcid.org/0009-0009-7527-5395
their depth and breadth (Arora, 2014). Nevertheless,
this would unavoidably lead to a significant rise in the
network's parameter count, leading to overfitting (He,
2016). Szegedy et al. (Szegedy, 2017) from Google
introduced the Inception module of deep
convolutional networks as a solution to the
aforementioned issues. This module's core principle
is the parallel integration of several convolutional
layers; concatenating the output matrices from each
layer in the depth dimension produces a more
complex matrix. By repeatedly stacking the Inception
module, a more extensive network can be created,
effectively increasing the network's depth and breadth.
This, in turn, enhances the accuracy of the deep
learning network and prevents overfitting. One
benefit of utilising the Inception module is its
capacity to merge visual data of varying dimensions
while reducing the size of matrices containing
numerous entries. This aggregation technique
facilitates extracting characteristics from images of
various sizes.
In addition to the Inception module, this study
delves into the residual connections proposed by He
Zhu, Z.
RARN: Lightweight Deep Residual Learning with Attention for Human Emotions Recognition.
DOI: 10.5220/0012911100004508
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Engineering Management, Information Technology and Intelligence (EMITI 2024), pages 127-134
ISBN: 978-989-758-713-9
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
127
et al. (He, 2016). They contend that residual
connections are inherently vital for efficiently
training deep networks. Their ResNet addresses the
issue of model degradation caused by increased
network depth through the incorporation of a deep
residual learning module. Specifically, this module
employs a stacking mechanism that combines the
input and output of each layer without introducing
additional parameters or computations, thereby
enhancing the convergence speed of model training.
Another study (Wang, 2017) has demonstrated that
incorporating a spatial attention mechanism into
ResNet ensures that an image retains its original
features even after undergoing operations like
cropping, translation, or rotation. This enhancement
significantly improves the accuracy of model
predictions.
This study encapsulates the foundational concepts
of the previously mentioned network modules and
introduces a novel and versatile facial expression
detection model, termed the Rotation-Aware
Residual Network (RARN). RARN is designed to
balance both network performance and efficiency,
addressing critical aspects overlooked by existing
architectures. Through rigorous experimentation on
the FER-2013 dataset, the effectiveness and
practicality of RARN are thoroughly evaluated.
Comparative analyses against conventional ResNet
and InceptionNet architectures highlight the unique
contributions of RARN in achieving superior
performance metrics while maintaining
computational efficiency. This research underscores
the significance of incorporating rotation-aware
mechanisms in facial expression detection, offering
valuable insights into improving accuracy and
robustness.
2 LITERATURE REVIEW
2.1 Deep Residual Learning
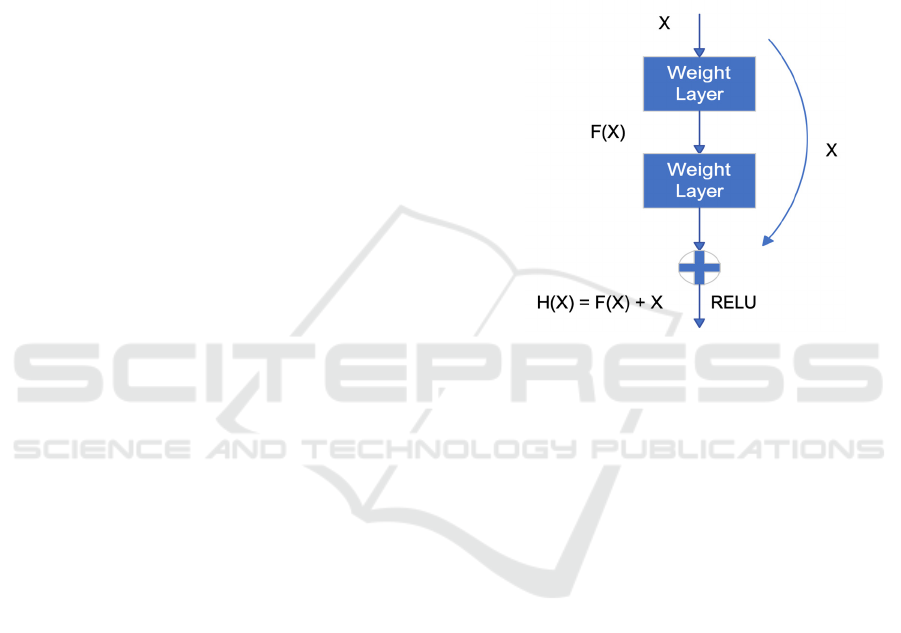
He et al. (He, 2016) proposed including a residual
framework in the network architecture to address the
issue of training deep networks. The residual network
is based on the concept of a highway network, which
has shortcut connections in its construction. This
allows the input to be immediately sent to the output.
Specifically, the fundamental concept underlying
ResNet is the presumption that an optimal solution
exists for the model's network architecture. In other
words, ResNet holds that numerous network layers
are frequently redundant in the actual deep network
architecture. To achieve the completion of the
identity mapping in these redundant levels and verify
that the input and output of the identity layer are
identical, as seen in Figure 1, ResNet modifies the
input of the residual module from 𝐹
𝑋
to 𝐻
𝑋
𝐹
𝑋
𝑥. If the network layers are redundant, then
just let 𝐹
𝑋
equal zero to achieve the identity
mapping. Through the incorporation of this residual
learning module, the network can substantially
augment the network layer's depth throughout the
design phase.
Figure 1: Residual Module (Photo/Picture credit: Original).
The ResNet architecture is often used for object
recognition because of its efficient design. The
architecture has a single convolutional layer, multiple
convolutional blocks in the intermediate section, and
an output layer. The ResNet architecture is classified
as ResNet18, ResNet34, ResNet50, ResNet101, and
ResNet152, according to the quantity of
convolutional blocks included in the centre. As more
blocks are included, the network increases in depth,
enabling the detection of increasingly complex
feature patterns.
2.2 Inception Module
The primary concept behind the Inception module
(Szegedy, 2015) is to simultaneously apply multiple
convolution operations or pooling operations to the
input image. This enables the retrieval of different
dimensions of feature data from the input picture. The
convolution output results are then merged and
concatenated to create a more comprehensive feature
map, resulting in an enhanced image representation.
This not only significantly expands the breadth of the
network, but it may also serve as a substitute for
manually picking the filter type in a convolutional
layer or deciding whether to set convolutional and
pooling layers.
EMITI 2024 - International Conference on Engineering Management, Information Technology and Intelligence
128

The Size-Aware Parallel Residual network
architecture suggested in this paper is a deep and
intricate structure composed of linked modules
inspired by the concept of the Inception module
(Szegedy, 2016). Each module has several
convolutional and pooling layers specifically
designed to extract distinct characteristics from the
input picture. The Inception module consists of two
main components: decomposed convolution and
batch normalisation. Decomposed convolutions use a
blend of convolutional filters with varying kernel
sizes to extract characteristics from the input picture.
1x1 convolutional filters are used to decrease the
input dimensionality, while high-latitude
convolutional filters are utilised to extract more
intricate features from the input image. Batch
normalisation is a technique that helps to stabilise the
training process and mitigate the problem of internal
covariate shift. Internal covariate shift refers to the
changes in the distribution of network inputs that
occur during training.
2.3 Attention
While convolutional neural networks possess a robust
capacity for nonlinear expression, in cases when the
information is exceedingly complicated, it becomes
imperative to construct a more intricate network
model in order to get a more potent expression ability.
To simplify the model, the attention mechanism may
enhance the neural network's capacity to process
information by mimicking the way the human brain
handles excessive data. During face expression
identification tasks, the gathered photographs are
often categorised into distinct classification outcomes
as a consequence of varying shooting angles. An
effective approach is to enhance the network's
sensitivity to angles by including a spatial attention
mechanism in the network design. A spatial
transformation neural network (Zhang, 2023) has the
ability to convert different types of deformed data in
space and automatically identify the features of
significant areas. This module guarantees that the
resulting picture after performing cropping,
translation, or rotation operations will be identical to
the original image before the operations were applied.
3
ROTATION-AWARE RESIDUAL
NETWORK (RARN)
3.1 Overview
The RARN builds upon the ResNet framework for
facial expression classification, leveraging both
high-level and low-level image features while
integrating an angle-sensitive attention mechanism.
Illustrated in Figure 2, the network architecture
comprises a multi-scale fusion module and an angle-
sensitive spatial attention module. The former
extracts features from input images using a
combination of down-sampling, up-sampling, and
lateral connections, facilitating the fusion of low-
level and high-level information for comprehensive
feature representation. Meanwhile, the angle-
sensitive spatial attention module enhances feature
extraction by incorporating angle information into the
feature map, allowing for adaptive feature weighting
tailored to different facial expressions. This
innovative approach enables RARN to capture both
global and local characteristics more effectively,
thereby enhancing its ability to classify facial
expressions accurately.
Figure 2: Rotation-Aware Residual Network (Photo/Picture
credit: Original).
3.2 Unit for Fusion on Multiple Scales
The unit for fusion on multiple scales integrates
micro-expression features into the generalized facial
expression recognition process. Specifically, it
incorporates low-level characteristics to detect subtle
changes in expression, as relying solely on high-level
features may overlook them. Typically, low-level
characteristics offer limited semantic information but
provide precise physical position details. On the other
hand, high-level characteristics contain rich semantic
details but lack complete spatial position information.
The module aims to optimise the utilisation of global
features by integrating low-level and high-level
features.
To mitigate the potential issue of gradient
vanishing in the deep feature extraction network, this
study employs Resnet as the feature extraction
network for the detection network. After a thorough
experimental comparison, it is determined that
Resnet152 has a superior detection effect, and the
time loss is also within an acceptable range. Therefore,
Resnet152 is chosen as the backbone network.
Comprising three steps - downsampling, upsampling,
and lateral connection - as depicted in Figure 3, the
multi-scale fusion module orchestrates the integration
process.
RARN: Lightweight Deep Residual Learning with Attention for Human Emotions Recognition
129
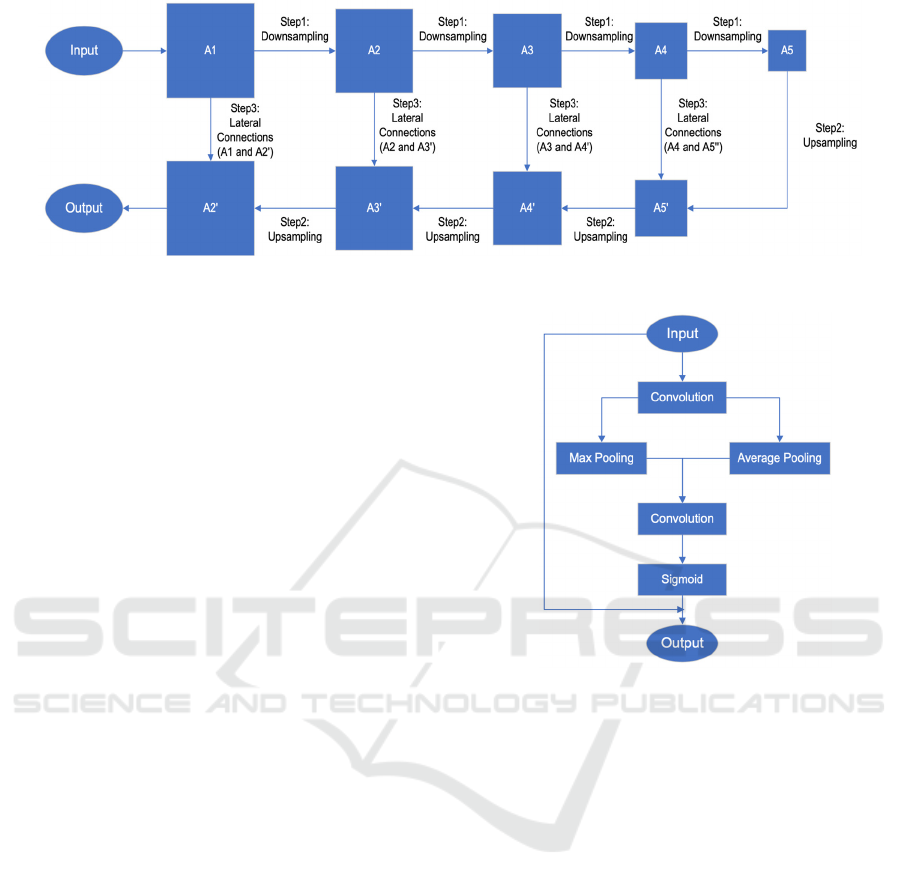
Figure 3: Multi-scale fusion module (Photo/Picture credit: Original).
The downsampling process involves utilizing the
Residual Module architecture to extract feature maps
from five layers of varying depths, starting from the
bottom and progressing upwards, with a scaling
factor of two. This phase establishes a feature
hierarchy comprising feature maps of diverse sizes.
Considering that the bottommost layer of each stage
has the most durable traits, the output from the last
layer of each stage is chosen for further operations.
Downsampling allows the network to retrieve feature
maps, transitioning from high-level to low-level. This
enables the network to capture both the overall
characteristics of the expression as well as the subtle
variations in micro-expressions for each face.
To fully use these feature maps, this study uses
upsampling and lateral connection techniques to
effectively merge the features at each layer.
Specifically, starting with the fifth layer feature map
A5, the feature map A5 is upsampled to match the
size of the fourth layer feature map A4. Subsequently,
the newly generated feature map A5' and the feature
map from the fourth layer A4 are joined in a lateral
manner to produce a novel feature map. Similarly, up
sampling this new feature map to match the
dimensions of the feature map A3, which outputs a
new feature map A4'. And then laterally connect A4'
and A3. This iterative procedure continues until all
feature maps have been computed. By combining
high-level and low-level features, the network is able
to effectively capture both global and local features
without experiencing overfitting or underfitting.
Furthermore, this strategy does not adversely impact
the performance of the model.
3.3 Angle-Sensitive Spatial Attention
Module
The angle-sensitive spatial attention module
comprises six distinct phases, as seen in Figure 4.
Figure 4: Angle-sensitive Spatial Attention Module
(Photo/Picture credit: Original).
First, the input feature map is convolutionally
transformed into the Angle feature map, which is
subsequently subjected to average pooling and max-
pooling across column channels. In the spatial
dimension, global maximum pooling and global
average pooling reduce the size of the feature maps.
Pooling at various levels results in more intricate
high-level characteristics being recovered. More
precisely, the process of global average pooling
allows for the inclusion of each individual pixel on
the feature map, while global max pooling allows for
the identification of the location in the feature map
with the highest response during gradient
backpropagation.
Next, the two graphs generated in the previous
phase are joined along the channel axis. Then, a
convolutional network is used to enhance the capacity
for nonlinear expression. Subsequently, the feature
maps undergo normalisation via a Sigmoid function
to derive weights for the channel characteristics,
resulting in the angle-sensitive spatial attention
weight map. Ultimately, the acquired angle-sensitive
EMITI 2024 - International Conference on Engineering Management, Information Technology and Intelligence
130
spatial attention weight map is multiplied by the input
feature map to allocate distinct attention weights to
the feature map based on the spatial angle.
4 EXPERIMENTS
4.1 FER-2013 Dataset
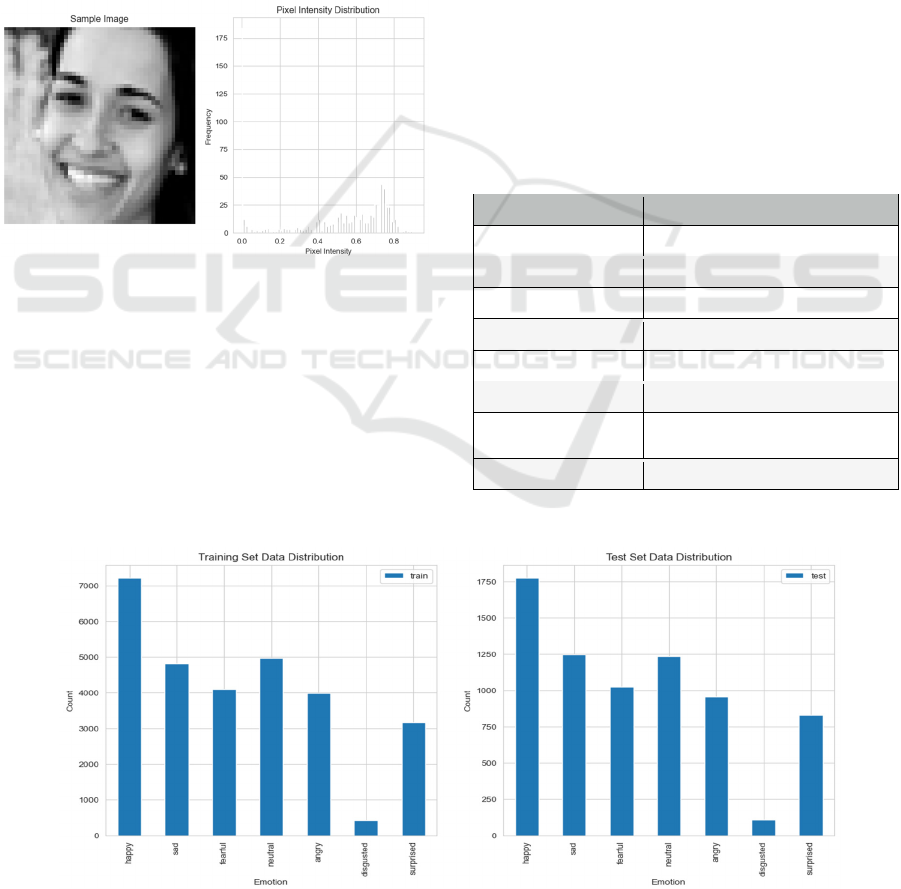
The FER-2013 Dataset was first shown at the Facial
Expression Recognition Challenge at the ICML 2013
session (Goodfellow, 2013). The dataset comprises
35,887 grayscale photographs of faces with
dimensions of 48x48 pixels, as shown in Figure 5.
Figure 5 Sample Image & Pixel Intensity Distribution
(Photo/Picture credit: Original).
The majority of these photos have been mechanically
aligned to ensure that the faces are roughly centred
and occupy a similar amount of space in each image.
A comparison of the training and test datasets' label
distributions is shown in Figure 6.
The training sample consists of two columns,
namely "emotion" and "pixel". The Emotion column
categorises each face into one of seven distinct
categories depending on the specific emotion shown
in the facial expression. These categories are as
follows: anger, disgusted, fearful, happy, neutral, sad,
and surprised. The "pixels" column comprises a string
of characters surrounded by quotation marks for each
picture. The test sample only consists of the "pixel"
column.
4.2 Image Pre-Processing
This study employs many popular data augmentation
techniques on the training dataset to generate new and
different pictures from the original photos and
enhance the performance and robustness of Size-
Aware Parallel Residual. These include various
modifications such as rotation, mirroring, and
cropping, along with brightness, contrast, and colour
adjustments. Engaging in this strategy mitigates
overfitting and enhances the generalisation capacity
of models trained on image data. Table 1 presents the
data augmentation settings used for the FER-2013
Dataset in this study.
Table 1: Image Augmentation Parameters.
Parameter Value
Horizontal Flip 1
Vertical Flip 1
Random Grayscale 0.2
Height Shift Range 0.28
Width Shift Range 0.75
Rotation Range 90
Colour Jitter
brightness=0.2, contrast=0.2,
hue=0.2
Normalisation 1
Figure 6: Training and Test Set Data Distribution (Photo/Picture credit: Original).
RARN: Lightweight Deep Residual Learning with Attention for Human Emotions Recognition
131

4.3 Training
The network is trained using the PyTorch and
Torchvision libraries in Python for 33 epochs. The
batch size is 64. The optimisation uses the SGD
optimiser with an initial learning rate of 0.01 and a
decay rate of 0.9 after three epochs of repetition. The
loss function employed is categorical cross-entropy,
calculated using the formula
∑
𝑙𝑜𝑔𝑝
𝑦
∈
𝑐
. In this calculation, 𝑝
𝑦
∈𝑐
represents
the chance that a picture y_i belongs to category 𝐶
.
All tests are conducted under the same running
environment, as shown in Table 2.
Table 2: Running Environment.
System Ubuntu 22.04
CPU AMD Ryzen 9 5900HS
Memory 32GB
GPU NVIDIA RTX 3060
4.4 Evaluation
Figure 7 illustrates the precision of the model across
both the training and test datasets. It vividly portrays
the model's progressive convergence, culminating
instability on the test set, ultimately achieving a final
accuracy of 57.51%. By observing the changes in the
test curves of the two graphs, it becomes evident that
the model has reached a state of stability by the 25th
epoch of training. Meanwhile, as the model is further
trained, the evaluation accuracy and loss are
correspondingly enhanced, although the training
accuracy is constantly improving. This indicates that
the proposed model has not entered an overfitting
state and can stimulate the best performance of the
model.
Figure 7: Accuracy & Loss Distribution (Photo/Picture credit: Original).
Figure 8: Classification Report (Photo/Picture credit: Original).
EMITI 2024 - International Conference on Engineering Management, Information Technology and Intelligence
132

The detailed statistics presented in Figure 8
meticulously evaluate the accuracy of the forecast
outcomes. It's noteworthy that the training efficacy of
the network model is perceptibly impacted by the
quantity of training datasets. The category of disgust
has the smallest dataset, which explains the reason
why it has the most notable disparity in terms of
Precision, Recall, and F1-Score. The two classes that
showed the most significant discrepancies in the
effect of model predictions on the test set are the
fearful and happy classes. Based on this outcome, it
can be deduced that some expressions exhibit notable
variations in prediction outcomes as a consequence of
their intricacy. Hence, investigating the network
structure with the explicit goal of identifying a certain
kind of expression might be regarded as a prospective
area of study.
To validate the improved classification
performance of the proposed network, this research
also conducts a comparative analysis of many popular
classification neural networks, including
InceptionNet (Szegedy, 2017) and MobileNet
(Howard, 2017). Table 3 demonstrates that when
using the same training settings and environment,
RARN outperforms other models in terms of
obtaining convergence and producing a final model
with greater accuracy. RARN enhances the accuracy
of the model's recognition rate while only requiring a
minimal amount of parameters. This demonstrates
that RARN guarantees the performance of the
network while also assuring the benefits of
operational efficiency. RARN achieved an Accuracy
of 57.51%, with gains of 0.54% and 21.17%
compared to InceptionNet and MobieNet
Table 3: Comparison of Accuracy.
Network Accuracy
RARN 57.51%
InceptionNet 56.47%
MobielNet 36.34%
5 CONCLUSIONS
This study presents a comprehensive facial
expression categorization technique that harnesses
attention mechanisms and deep learning. The
approach integrates a multi-scale fusion module and
an angle-sensitive spatial attention module to drive
the classification function. While the multi-scale
fusion module captures both global and specific
characteristics of the input image, the angle-sensitive
spatial attention module enhances feature mapping by
incorporating angle information. Experimental
results showcase the method's superior recognition
rate and substantial improvement in facial expression
categorization. Future research endeavours will delve
into refining network structures, exploring
parameters like convolution core size and step size,
and further defining network levels. Additionally, the
inclusion of more extensive datasets will enhance the
evaluation of the network's performance.
REFERENCES
He, K., Zhang, X., Ren, S., & Sun, J. (2016). Deep residual
learning for image recognition. In Proceedings of the
IEEE conference on computer vision and pattern
recognition (pp. 770-778).
Szegedy, C., Ioffe, S., Vanhoucke, V., & Alemi, A. (2017,
February). Inception-v4, inception-resnet and the
impact of residual connections on learning. In
Proceedings of the AAAI Conference on artificial
intelligence (Vol. 31, No. 1).
Zhou, J., Xiong, Y., Chiu, C., Liu, F., & Gong, X. (2023).
Sat: Size-aware transformer for 3d point cloud semantic
segmentation. arXiv preprint arXiv:2301.06869.
Ekman, P., Sorenson, E. R., & Friesen, W. V. (1969). Pan-
cultural elements in facial displays of emotion. Science,
164(3875), 86-88.
Arora, S., Bhaskara, A., Ge, R., & Ma, T. (2014, January).
Provable bounds for learning some deep
representations. In International conference on machine
learning (pp. 584-592). PMLR.
Wang, F., Jiang, M., Qian, C., Yang, S., Li, C., Zhang, H., ...
& Tang, X. (2017). Residual attention network for
image classification. In Proceedings of the IEEE
conference on computer vision and pattern recognition
(pp. 3156-3164).
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S.,
Anguelov, D., ... & Rabinovich, A. (2015). Going
deeper with convolutions. In Proceedings of the IEEE
conf. on Computer Vision and Pattern Recognition (pp.
1-9).
Szegedy, C., Vanhoucke, V., Ioffe, S., Shlens, J., & Wojna,
Z. (2016). Rethinking the inception architecture for
computer vision. In Proceedings of the IEEE conf. on
computer vision and pattern recognition (pp. 2818-
2826).
Zhang, X., Liu, C., Yang, D., Song, T., Ye, Y., Li, K., &
Song, Y. (2023). Rfaconv: Innovating spatital attention
and standard convolutional operation. arXiv preprint
arXiv:2304.03198.
Goodfellow, I. J., Erhan, D., Carrier, P. L., Courville, A.,
Mirza, M., Hamner, B., ... & Bengio, Y. (2013).
Challenges in representation learning: A report on three
machine learning contests. In Neural Information
Processing: 20th International Conference, ICONIP
RARN: Lightweight Deep Residual Learning with Attention for Human Emotions Recognition
133

2013, Daegu, Korea, November 3-7, 2013. Proceedings,
Part III 20 (pp. 117-124). Springer berlin heidelberg.
Howard, A. G., Zhu, M., Chen, B., Kalenichenko, D., Wang,
W., Weyand, T., ... & Adam, H. (2017). Mobilenets:
Efficient convolutional neural networks for mobile
vision applications. arXiv preprint arXiv:1704.04861.
EMITI 2024 - International Conference on Engineering Management, Information Technology and Intelligence
134
