
Contrastive Learning and Abstract Concepts: The Case of
Natural Numbers
Daniel N. Nissani (Nissensohn)
Independent Research, Israel
Keywords: Contrastive Learning, Self-Supervised Learning, Learning Representations, Generalization, Counting,
Subitizing, Natural Numbers, Conservation Principles.
Abstract: Contrastive Learning (CL) has been successfully applied to classification and other downstream tasks related
to concrete concepts, such as objects contained in the ImageNet dataset. No attempts seem to have been made
so far in applying this promising scheme to more abstract entities. A prominent example of these could be the
concept of (discrete) Quantity. CL can be frequently interpreted as a self-supervised scheme guided by some
profound and ubiquitous conservation principle (e.g. conservation of identity in object classification tasks).
In this introductory work we apply a suitable conservation principle to the semi-abstract concept of natural
numbers by which discrete quantities can be estimated or predicted. We experimentally show, by means of a
toy problem, that contrastive learning can be trained to count at a glance with high accuracy both at human as
well as at super-human ranges. We compare this with the results of a trained-to-count at a glance supervised
learning (SL) neural network scheme of similar architecture. We show that both schemes exhibit similar good
performance on baseline experiments, where the distributions of the training and testing stages are equal.
Importantly, we demonstrate that in some generalization scenarios, where training and testing distributions
differ, CL boasts more robust and much better error performance.
1 INTRODUCTION AND
RELATED WORK
Contrastive Learning (CL) is a self supervised
scheme which has attracted much attention in recent
years. In the visual modality realm it maps a visual
input (e.g. objects to be classified) to linearly
separable representations which achieve
classification accuracy rates competitive with those
of supervised learning (SL) networks of similar
architecture (Chen et al., 2020) in challenging
datasets such as ImageNet (Deng et al., 2009).
In spite of its impressive success in the space of
concrete concepts (Chen et al., 2020), neither CL nor
its variants (Grill et al., 2020; He et al., 2020; Chen &
He, 2020) have been apparently applied so far to the
learning and prediction of abstract or semi-abstract
entities. In a recent work (Nissani (Nissensohn),
2023) has shown that CL can (unlike SL) build
“hyper-separable” representations which are useful
not only to predict an object identity but also to
indicate the existence (or absence) of selected
attributes of interest of this object; this might be seen
as a first modest step away from the concrete and
towards the abstract. Another prominent example of
the learning, ‘grounding’, or in-depth ‘understanding’
of such an abstract entity could be that of the concept
of natural numbers (equivalently, discrete quantities).
This work is a preliminary and introductory step
forward in this direction.
CL exploits, in the concrete visual modality, a
profound principle of conservation: that distinct
views of an object preserve the identity of said object.
To create such distinct views suitable transformations
should (and generally can) be designed (Tian et al.,
2020). Analog principles of conservation have been
applied in physics (e.g. conservation of energy, of
momentum, etc. under suitable reference frames
transformations) with extraordinary success during
the last two centuries.
To apply a relevant and useful transformation to
our (discrete) quantity prediction challenge within a
CL scheme we can imagine the following thought
experiment: that we have objects which we wish to
count at a glance (that is “count without counting”,
see ahead), that these objects lay at the bottom of a
closed box with transparent cover. Shaking the box,
Nissani (Nissensohn), D.
Contrastive Learning and Abstract Concepts: The Case of Natural Numbers.
DOI: 10.5220/0012917500003837
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Joint Conference on Computational Intelligence (IJCCI 2024), pages 523-530
ISBN: 978-989-758-721-4; ISSN: 2184-3236
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
523

our transformation, will randomly change the layout
of the objects inside the box, but the total number of
objects on the box floor will be conserved (since the
box is closed, etc.).
Our CL optimization goal l(i, j) will then consist
of minimizing the normalized distance (Wang &
Isola, 2020) between the neural network so called
projection (i.e. last) layer (Chen et al., 2020)
representations z
i
and z
j
of the pre- and post-shaking
views (‘positive samples’ in the CL jargon) while
simultaneously maximizing the distances between
these representations and the representations of other
samples randomly gathered in a mini-batch (‘negative
samples’). Formally, our goal will then be (see Chen
et al., 2020 for details):
𝑙
(
𝑖,𝑗
)
= (1)
−
𝑠𝑖𝑚𝑧
,𝑧
𝜏
+ log ( 1
exp (
𝑠𝑖𝑚
(
𝑧
,𝑧
)
𝜏
)
𝐿 = (2)
∑
[𝑙
(
2𝑘 − 1,2𝑘
)
+ 𝑙
(
2𝑘,2𝑘 − 1
)
]
where sim(. , .) is the normalized inner product (i.e.
the cosine similarity), τ is a system temperature, N is
the mini-batch size, 1
is a binary indicator function
which vanishes when k = i and equals 1 otherwise,
and L is the overall loss, i.e. l(i, j) summed over all
samples in the mini-batch. At the end of the
optimization process we freeze the neural network
learned parameters, fetch an interior layer and define
its output to be our linearly separable representation
vectors. These are then fed into a (usually supervised,
single layer) linear classifier.
We humans are able to estimate at a glance, with
high precision and with no explicit enumeration, a
relatively small (up to between 4 to 7) number of
objects in view (Trick & Pylyshyn, 1994). This
capability, for which the special term ‘subitizing’ was
coined (Kaufman et al., 1949) has motivated in recent
years a few groups of neural networks practitioners
(Chattopadhyay et al, 2017; Acharya et al., 2018) to
explore the application of supervised learning (SL)
schemes to a similar challenge.
We are not aware of any similar work on natural
numbers under the umbrella of CL, nor of the
application of CL schemes to other non-tangible
concepts.
As a preliminary introduction to these ideas we
implement a toy problem and corresponding datasets
by means of which CL and SL networks of similar
architecture are trained to subitize and predict the
quantity of identical objects present in an image. We
compare the error performance of these two schemes
at both a ‘baseline’ regime, where training and testing
data originate from identical distributions, as well as
at various generalization regimes, where training and
testing data distributions differ. CL is trained by a
more profound, potentially ‘grounding’, criterion
than SL, a criterion that is intimately related to the
concept of Quantity itself. We thus may well suspect
that it will exhibit error performance better than that
of SL, at least in some of the forementioned
generalization regimes.
The main contributions of this introductory work
are:
a. We demonstrate through the example of the
Quantity (equivalently, Natural Numbers)
non-tangible concept, that CL can learn
abstract concepts whenever transformations
which conserve their defining properties can
be identified and implemented.
b. We show that both CL and SL can learn to
subitize, both at human range (order of 10
objects) and super-human range (order of
100). Moreover, that the error performance of
CL and SL are similarly good under the
forementioned baseline regime scenarios.
c. We show that CL exhibits significant error
performance superiority over SL under certain
generalization regime scenarios, possibly
corroborating, as suspected, the more
profound and grounded nature of learning by
means of a conservation principle (relative to
SL learning which consists of merely forcing
representations to adjust to arbitrary labels).
In Section 2 the toy problem and test setup which
we introductorily employ to demonstrate these ideas
are presented. Section 3 details our simulation results,
and Section 4 provides concluding remarks and
outlines potential future lines of research.
2 EXPERIMENTAL SETUP
We implement a toy problem to conduct experiments,
demonstrate our ideas and probe into our CL
superiority conjecture. We generate (practically
infinite) sequences of random synthetic images of
dimension d x d pixels, with d = 22 or 28. Each image
contains a number of identical white objects laid out
over a black background. For each experiment we
select a training dataset distribution {O, S, R} and a
testing dataset distribution {O’, S’, R’} so we
designate an experiment by the composite triplet
{O/O’, S/S’, R/R’}.
NCTA 2024 - 16th International Conference on Neural Computation Theory and Applications
524

Figure 1: Synthetic image samples. Each image of d x d
pixels (d = 28 in this Figure) contains a random layout of a
random number of objects of an identical shape. Shapes are
either (from top to bottom) Full squares (denoted F in the
text), Void squares (V), Dots (D) and Crosses (C); we may
either preset the objects shape for all images within the
dataset with the same selected shape, or randomly pick for
each image a fixed shape amongst F/V/C which we denote
by X (for miXed, not shown in Figure). The shapes
definition is thus an element of {F, V, C, D, X}.
Baseline experiments consist of triplets where O
= O’, S = S’ and R = R’; otherwise they are
Generalization experiments wherein the training and
testing distributions differ.
O is the maximal number of objects in an image
and took in our experiments the values 10 (to emulate
human range), 60 or 80 (for super-human); the
number of objects in an image is uniformly randomly
selected within a subset of [1, O].
S defines the shape of all objects within an image
and, for the sake of some shape diversity, can take the
values F, V, C, D or X (see Figure 1 for details).
R can take the values A (for All), E (for Evens) or
O (for Odds) where A means that the number of
objects in an image can be any in the range [1, O]
while E or O restricts this number to the subset of
even or odd values respectively.
A typical experiment may consist of {O/O’, S/S’,
R/R’} = {80/80, D/D, A/A} which means identical
training and testing distribution (i.e. a Baseline
experiment) with between 1 to 80 objects in each
image, each object of Dot shape, and no Evens nor
Odds only restriction.
The objects are randomly laid out within the
image. We do not allow objects to occlude nor touch
each other. Each sample image is generated along
with its label which describes the number of objects
in that sample.
We train a simple fully connected multi layer
neural network by CL with architecture [d
2
400 400
100] where the last layer, of dimension 100, is the (so
called) projection layer (Chen et al., 2020) and the
penultimate layer, of dimension 400 is our
representation layer.
We use for SL an identical architecture, except for
the last layer which for SL contains a softmax
activation function of dimension O. Note that we
could instead have chosen to implement a regression
(e.g. linear) scheme for SL. We opted for the former
since it supports a more ‘apples to apples’
comparative study.
It is not so simple to physically emulate the
“shaking of our box” (of our thought experiment
above) in order to create a new image sample with the
same number of objects within it but with a different
random objects layout. Instead, we opt for a
surrogate: we take the label attached to each image
(which describes the number of objects in that image)
and use it to generate another (random layout) image
with this specified number of objects. This may seem
at first glance a cheating perversion by which we
convert our CL (unsupervised learning) scheme into
a supervised learning one (since we are now using
labels for our ‘transformation’). After some reflection
Contrastive Learning and Abstract Concepts: The Case of Natural Numbers
525

however, it should be easy to conclude that this is
immaterial to our purpose. The same results we are
going to show can be exactly replicated by a true
physical shaking of our box.
Training of CL or SL proceeded for a number of
samples until no further visible convergence progress
is observed in the Loss goal (Eqns. (1) and (2) above
for CL) or in the training Mean Squared Error goal
(for SL). Once training is halted we freeze the CL (or
SL) parameters, and train a single layer supervised
linear classifier (Oord et al., 2018) with the CL (or
SL) network representations generated by the testing
dataset distribution. After this linear classifier is
trained, we evaluate error performance with samples
generated by means of this same selected test dataset
distribution (as mentioned above our datasets are
practically infinite so we are not, by no means and as
properly prohibited, re-using samples for both
training and testing).
We set the CL hidden layers neural units
activation to ReLU and the last layer units to tanh. CL
temperature (τ of Equation 1) was set to 1, and batch
size (N of Equation 2) was set to 10
3
. We used ADAM
(Kingma & Ba, 2015) gradient descent with fixed
learning rate η = 10
-3
. The number of training samples
ranged from 1.8 x 10
6
(equivalent to e.g. 30 MNIST
epochs) to 3.6 x 10
6
depending on the running
experiment.
SL units were here again set to ReLU for hidden
layers but to softmax activation for the last layer. We
used ADAM with fixed learning rate η = 5 x 10
-4
for
the initial stage followed by plain gradient descent
with learning rate typically descending from 10
-5
to
10
-7
. We found this protocol necessary to achieve our
best error performance, possibly testifying the
navigation within a deep narrow valley (Martens,
2010). The number of SL training samples ranged
from 4.2 x 10
6
to 10.8 x 10
6
.
Finally, the linear classifier was trained by ADAM
followed by plain SGD, with similar optimization
protocol as that of SL above and number of samples
typically ranging from 2.4 x 10
6
to 28.8 x 10
6
.
Across all three above schemes ADAM parameters
were set to β
1
= 0.9, β
2
= 0.999 and e = 10
-8
.
To facilitate replication of our results a simulation
package will be provided by the author upon request.
3 SUBITIZING EXPERIMENTAL
RESULTS
In this Section we will be comparing CL vs. SL
subitizing error performance. To probe whether our
forementioned conjecture, which states that CL will
boast superior performance w.r.t. SL in at least some
of the Generalization scenarios (where training and
test distributions differ) we define a set of appropriate
experiments. We also provide baseline results (where
training and testing distributions are identical) for
reference.
Generalization here can be applied along the
shape dimension, or the quantity dimension, or both
at a time (which we do not pursue herein). For
convenience we list below the experiments
(generalized item bold and underlined; please refer to
Section 2 for triplets legend):
• Shape Dimension (human range; train with
miXed images, test with Dots):
o Baseline: {O/O’, S/S’, R/R’} = {10/10,
X/X, A/A}
o Generalization: {O/O’, S/S’, R/R’} =
{10/10, X/D, A/A}
• Quantity Dimension, Range extension (super
human range; train with up to 60 objects, test
with up to 80):
o Baseline: {O/O’, S/S’, R/R’} = {60/60,
D/D, A/A}
o Generalization: {O/O’, S/S’, R/R’} =
{60/80, D/D, A/A}
• Quantity Dimension, within Range (super
human range; train with up to 80 objects, Even
values only, test with up to 80, All values):
o Baseline: {O/O’, S/S’, R/R’} = {80/80,
D/D, E/E}
o Generalization: {O/O’, S/S’, R/R’} =
{80/80, D/D, E/A}
• Quantity Dimension, within Range (super
human range; train with up to 80 objects, Even
values only, test with up to 80, Odd values
only):
o Baseline: {O/O’, S/S’, R/R’} = {80/80,
D/D, E/E}
o Generalization: {O/O’, S/S’, R/R’} =
{80/80, D/D, E/O}
3.1 Shape Dimension (Human Range;
Train with Mixed Images, Test with
Dots)
We report Pr
CL, B
{error} = 0.042 and Pr
SL, B
{error} =
0.007 for Baseline test (denoted by B in super-script),
i.e. {O/O’, S/S’, R/R’} = {10/10, X/X, A/A}, for CL
and SL respectively.
That SL yields better performance than CL under
baseline tests with similar networks architecture is no
surprise: it was noticed in prior works, see e.g. (Chen
et al. 2020) where in order to achieve similar error
NCTA 2024 - 16th International Conference on Neural Computation Theory and Applications
526
performance a deeper and wider architecture (on CL
network relative to SL) was required.
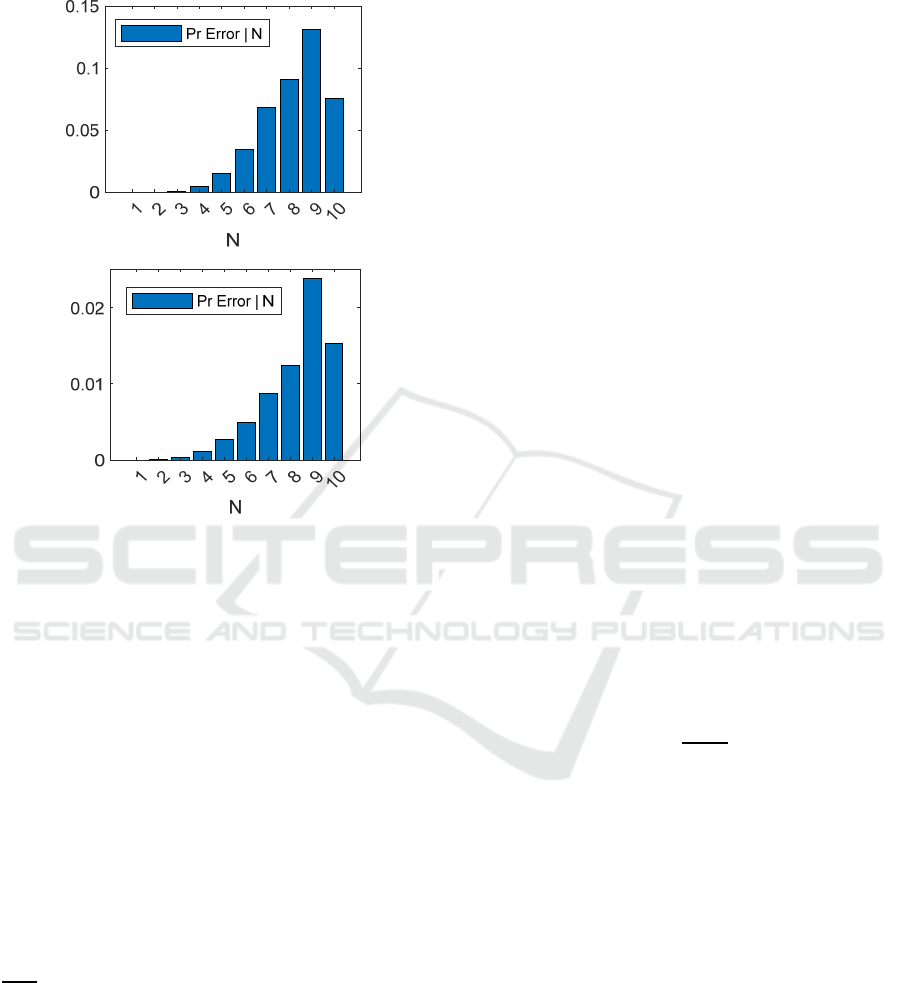
Figure 2: Shape Baseline test, 10 Objects, train with miXed,
test with miXed. Conditional probability of Error given
Ground Truth for CL (top) and SL (bottom).
Interestingly, errors are not uniformly distributed
across ground truth values at both CL and SL (see
Figure 2): as might be intuitively expected error rate
steadily increases from small to large ground truth
values (with 10 a possible curious exception; this may
be an artifact of our setup: since we set a hard limit of
10 through our softmax function, errors at this ground
truth value are contributed, unlike at other values, by
one side only). A qualitatively similar phenomenon
was observed in subitizing experiments conducted
with human subjects (Kaufman et al., 1949). We did
not observe however a similar trend with our
experiments at super human range.
We next turn to the corresponding Shape
Generalization test, i.e. {O/O’, S/S’, R/R’} = {10/10,
X/D, A/A} where training is conducted with miXed
images (which, as described above, contain either F
or V or C objects but do not contain Dots) but testing
is done with Dots images. Error probability
significantly degrades, with similar degradation at CL
and SL: Pr
CL, G
{error} = 0.31 and Pr
SL, G
{error} = 0.30
(superscript G here denotes Generalization).
More important perhaps however in a quantity
estimation task than this gross error measure is the
conditional distribution of Distances (conditioned on
error events), where Distance = |Ground Truth value
– Predicted value|: in practical situations to predict a
value of 8 instead of a ground truth value 9 is
forgivable while to predict a 1 in the same case is not.
This more suitable metric can be observed in
Figure 3: we notice that in spite the significant
forementioned Pr{error} degradation, the distribution
of Distance in both CL and SL is remarkably
concentrated in the very low values, with Pr
CL
G
{Distance > 1 | error} = 0.036 and Pr
SL G
{Distance
> 1 | error} = 0.041, again pretty similar to each other.
To summarize, in this Shape Generalization
experiment CL and SL perform similarly; they both
degrade significantly in terms of Pr{error}, but their
more tolerant (and perhaps relevant) Pr{Distance > 1
| error} metric is still pretty good.
We have provided this Figure to contrast vs. next
experiments, as we will immediately see.
3.2 Quantity Dimension, Range
Extension (Super Human Range;
Train up to 60 Objects, Test with
up to 80)
Here we report Pr
CL, B
{error} = 0.029 and Pr
SL,
B
{error} = 0.004 for the Baseline test, i.e. {O/O’,
S/S’, R/R’} = {60/60, D/D, A/A}, for CL and SL
respectively. Since the Distance distribution metrics
is apparently of more significant relevance in
subitizing tasks we also report for the Baseline test
Pr
CL B
{Distance > 1 | error} = 0.035 and Pr
SL
B
{Distance > 1 | error} = 0.002.
The corresponding Quantity Generalization test is
{O/O’, S/S’, R/R’} = {60/80, D/D, A/A} where
training is conducted with up to 60 Dots images and
testing is done with up to 80 Dots images. Again, as
in the Shape Generalization experiment, error
probability significantly degrades, with similar
degradation at CL and SL: Pr
CL, G
{error} = 0.24 and
Pr
SL, G
{error} = 0.23.
Conditional Distance distributions of CL and SL,
however, are totally different. Please refer to Figure
4. While CL Distance distribution is concentrated in
the very low values (as in our earlier experiments) and
Pr
CL G
{Distance > 1 | error} = 0.12, SL distribution
practically explodes with Pr
SL G
{Distance > 1 | error}
= 0.80.
Briefly summarizing so far, in shape
generalization experiments (Subsection 3.1 above)
both CL and SL behave similarly: this is reasonable
since it is not shape what CL learns in depth and thus
they should not differ much from each other, just as
in baseline tests.
Contrastive Learning and Abstract Concepts: The Case of Natural Numbers
527
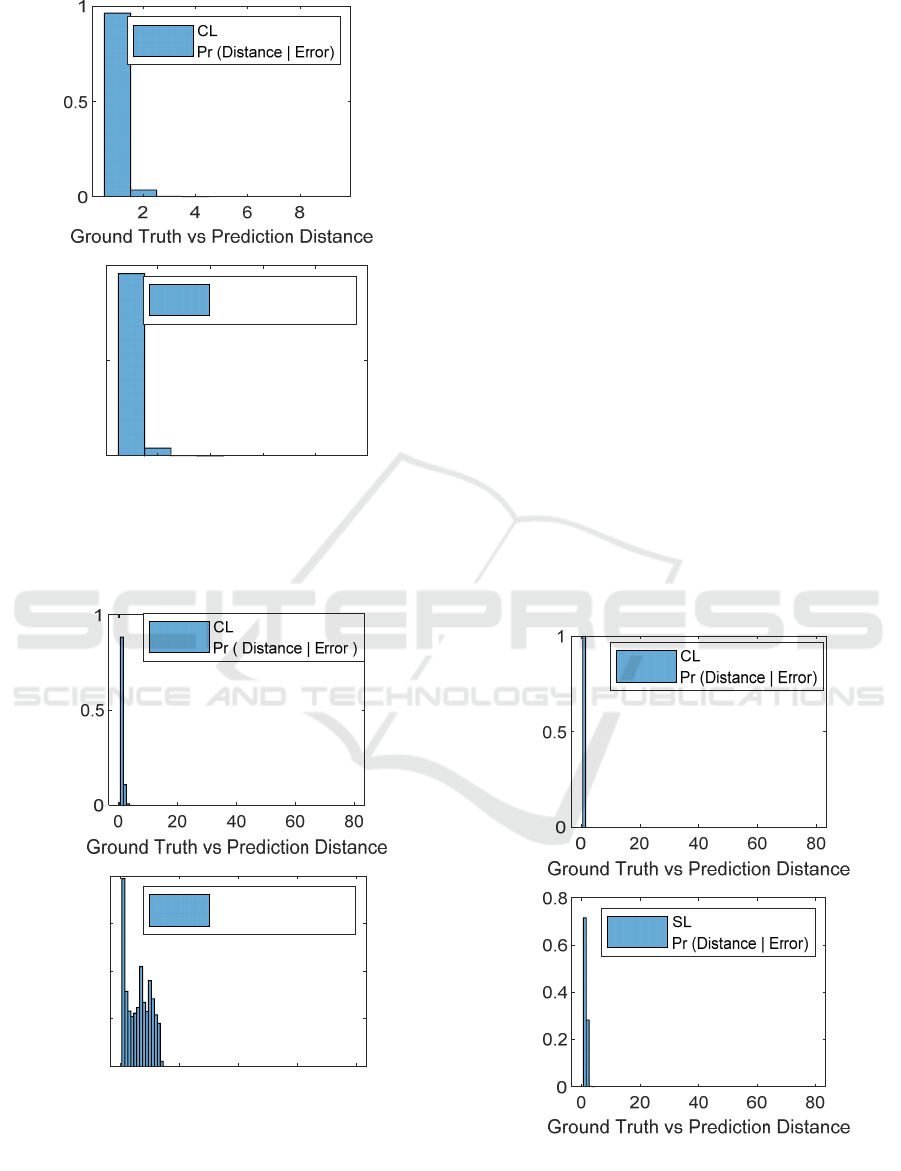
Figure 3: Shape Generalization, train with miXed, test with
Dots. Conditional probability distribution of Ground Truth
vs. Predicted Distance for CL (top) and SL (bottom).
Figure 4: Quantity Generalization, train with up to 60, test
with up to 80 Dots images. Conditional Distance
distribution for CL (top) and SL (bottom). CL exhibits a
modest degradation w.r.t. baseline test while SL collapses.
In contrast, in quantity generalization scenarios,
CL and SL respond extremely differently and CL
significantly outperforms SL. This can be attributed
in our view to the profoundness to which CL learns
the abstract concept of “numberness” by means of the
contrastive learning conservation principle,
compared to the merely forced mapping of input
images to arbitrary labels in SL. The concept of
Numbers seems to become ‘grounded’ in CL but not
so in SL.
3.3 Quantity Dimension, Within Range
(Super Human Range; Train with
up to 80 Objects, Even Values
Only, Test with up to 80, All
Values)
Next we report Pr
CL, B
{error} = 0.019 and Pr
SL,
B
{error} = 0.0004 as well as Pr
CL B
{Distance > 2 |
error} = Pr
SL B
{Distance > 2 | error} = 0 for the
Baseline test of this experiment, i.e. {O/O’, S/S’,
R/R’} = {80/80, D/D, E/E}, for CL and SL
respectively. Notice that conditional Distance
distribution results here are reported w.r.t. a threshold
valued 2 (rather than 1 as before) since Odds “do not
exist” in this Baseline scenario.
Figure 5: Quantity Generalization, train with Evens only,
test with All, both up to 80 Dots images. Distance
distribution for CL (top) and SL (bottom). CL exhibits no
degradation w.r.t. baseline test while SL once again
collapses.
2468
Ground Truth vs Prediction Distance
0
0.5
1
SL
Pr (Distance | Error)
0 20406080
Ground Truth vs Prediction Distance
0
0.05
0.1
0.15
0.2
SL
Pr (Distance | Error)
NCTA 2024 - 16th International Conference on Neural Computation Theory and Applications
528
The corresponding Quantity Generalization test is
{O/O’, S/S’, R/R’} = {80/80, D/D, E/A} where
training is conducted with even quantities (i.e. 2, 4.
6…80) of up to 80 Dots images, and testing is done
with all quantities (i.e. 1, 2, 3….80) of up to, again,
80 Dots images. SL degrades its error probability
w.r.t. baseline here, while CL this time exhibits even
better performance than its own baseline: Pr
SL
G
{error} = 0.045 and Pr
CL G
{error} = 0.00003.
Evaluating again with our conditional Distance
distribution metrics (please refer to Figure 5), CL
significantly outperforms SL here too with Pr
CL
G
{Distance > 1 | error} = 0 and Pr
SL G
{Distance > 1 |
error} = 0.285, supporting once again our motivating
conjecture.
3.4 Quantity Dimension, Within Range
(Super Human Range; Train with
up to 80 Objects, Even Values
Only, Test with up to 80, Odd
Values Only)
Our baseline setup here is identical to that of the last
experiment, i.e. {O/O’, S/S’, R/R’} = {80/80, D/D,
E/E}, for CL and SL respectively, and so are our
results. The conditional Distance distributions results
here (for both baseline and generalization tests) are
once again reported w.r.t. a threshold valued 2 (rather
than 1) for the same reason as in Subsection 3.3
above.
The corresponding Quantity Generalization test is
{O/O’, S/S’, R/R’} = {80/80, D/D, E/O} where
training is conducted with even quantities (i.e. 2, 4.
6…) of up to 80 Dots images and testing is done with
odd quantities (i.e. 1, 3, 5…79) of up to 79 Dots
images. Both CL and SL exhibit good error
probability with Pr
CL G
{error} = 0.026 and Pr
SL
G
{error} = 0.026 and both show excellent Distance
conditionals with Pr
CL G
{Distance > 2 | error} = Pr
SL
G
{Distance > 2 | error} = 0.
It appears that once CL and SL learn the Evens
the discriminative resolution of the resulting
representations is good enough to predict the Odds
with good error performance, For the SL scheme
however, this holds only provided that the Evens are
omitted from the testing dataset, so that they do not
‘confuse’ the SL network as apparently occurred in
our previous Subsection 3.3 experiment.
Table 1 provides a concise summary of our results
above.
4 DISCUSSION AND TOPICS
FOR FUTURE RESEARCH
We have provided preliminary demonstrative
evidence, through our selected example of quantity
estimation at a glance, that contrastive learning
methods can deal not only with concrete, tangible
concepts. Our choice however of natural numbers is
not casual. When
dealing with concrete objects it is
not difficult to identify transformation sets, with
random properties, which efficiently span the
distribution of a dataset; examples include crop and
color distortion for ImageNet (Chen et al., 2020) and
elastic distortion (Simard et al, 2003) for EMNIST
(Nissani (Nissensohn), 2023). This is possibly not the
case for abstract concepts in general, and identifying
viable abstract sets and their corresponding spanning
random transformations is a research challenge. It
would be of interest to see other such concepts to
follow-on our current very first step.
Table 1: Experiments results summary. T denotes a Threshold, valued 1 for all tests, except 5, 7 and 8 for which T = 2 (see
text). Most informative results are bolded/underlined.
Test
#
EXPERIMENT TEST CL SL CL SL
Pr{error} Pr{Distance > T |
error}
1 Shape, train
miXed test Dots
Baseline 0.042 0.007 0 0
2 Generalized 0.31 0.30 0.036 0.041
3 Qty, Range
extension, train 60
test 80 ob
j
ects
Baseline 0.029 0.004 0.035 0.002
4 Generalized 0.24 0.23 0.12 0.80
5 Qty, within
Range, train
Evens test All
Baseline 0.019 0.0004 0 0
6 Generalized 0.00003 0.045 0 0.285
7 Qty, within
Range, train
Evens test Odds
Baseline 0.019 0.0004 0 0
8 Generalized 0.026 0.026 0 0
Contrastive Learning and Abstract Concepts: The Case of Natural Numbers
529

We find it quite remarkable that both CL and SL
exhibit such impressive subitizing error performance
in baseline test scenarios even at super-human ranges.
We did not inquire into the existence of a practical
upper bound to this range nor, more generally, into
the error performance as function of the dataset range,
which of course should be of interest.
The results shown indicate that CL and SL perform
quite similar to each other in shape generalization
tests, both with significant error probability
degradation but with robust figures w.r.t. conditional
distance distribution. This might be expected since
the natural numbers conservation principle guiding
CL should not grant it any advantage when dealing
with varying shapes.
In contrast, CL alone maintains this robustness in
quantity generalization tests as well, and in particular
in range extension tests, where the scheme is asked to
estimate at a glance a quantity bigger than what it was
ever exposed to. This seems to support our motivating
conjecture that stated that CL, because it is guided by
the principle of conservation of natural numbers
should obtain, after training, a more deep and
grounded sense of ‘numberness’. And this would then
be the second case in a row at which CL seems to
show a fundamental superiority over SL in generating
information rich representations (the first being the
forementioned capability of detection of objects
attributes (Nissani (Nissensohn), 2023)).
In this introductory work we have devised and
employed a toy problem to demonstrate our ideas
because it has better control of test bench variables
and parameters. It should be of course important to
evaluate whether similar results can be achieved in
more realistic scenarios which may include clutter,
occlusion, composite scenes with different classes of
real-life objects, etc. Several datasets for such
purpose are already available (Acharya et al., 2019).
REFERENCES
Acharya, M., Kafle, K., Kanan, C., ‘TallyQA: Answering
Complex Counting Questions’, AAAI 2019
Chattopadhyay, P., Vedantarn, R., Selvaraju, R.R., Batra,
D., Parikh, D., ‘Counting Everyday Objects in
Everyday Scenes’, CVPR 2017
Chen, T., Kornblith, S., Norouzi, M., Hinton, G., ‘A Simple
Framework for Contrastive Learning of Visual
Representations’, PMLR 2020
Chen, X., He, K., ‘Exploring Simple Siamese
Representation Learning’, arXiv 2011.10566, 2020
Deng, J., Dong, W., Socher, R., Li, L., Li, K., Fei-Fei, L.,
‘ImageNet: A Large-Scale Hierarchical Image
Database’, CVPR 2009
Grill, J., Strub, F., Altche, F., Tallec, C., Richemond, P.H.,
Buchatskaya, E., Doersch, E., Pires, B.A., Guo, Z.D.,
Azar, M.G., Piot, B., Kavukcuoglu, K., Munos, R.,
Valko, M., ‘Bootstrap Your Own Latent. A New
Approach to Self-Supervised Learning’, arXiv
2006.07733, 2020
He, K., Fan, H., Wu, Y., Xie, S., Girshick, R., ‘Momentum
Contrast for Unsupervised Visual Representation
Learning’, arXiv 1911.05722v3
Kaufman, E.L., Lord, M.W., Reese, T.W., Volkmann, J.,
‘The Discrimination of Visual Number’, The American
Journal of Psychology, 1949, pp. 498-525
Kingma, D.P., Ba, J.L., ‘ADAM: A Method for Stochastic
Optimization’, ICLR 2015
Martens, J., ‘Deep learning via Hessian-free optimization’,
Proceedings of the 27
th
International Conference on
Machine Learning, 2010
Nissani (Nissensohn), D.N., ‘Contrastive Learning and the
Emergence of Attribute Associations’, ICANN 2023
Oord, A.v.d., Li, Y., Vinyals, O., ‘Representation Learning
with Contrastive Predictive Coding’, arXiv
1807.03748, 2018
Simard, P.Y., Steinkraus, D., Platt, J.C., ‘Best Practices for
Convolutional Neural Networks Applied to Visual
Document Analysis’, ICDAR 2003
Tian, Y., Sun, C., Poole, B., Krishnan, D., Schmid, C.,
Isola, P., ‘What Makes for Good Views for Contrastive
Learning?’, NIPS 2020
Trick, L.M., Pylyshyn, Z.W., ‘Why are Small and Large
Numbers Enumerated Differently? A Limited Capacity
Pre-attentive Stage in Vision”, Psychological Review,
1994
Wang T., Isola, P., ‘Understanding Contrastive
Representation Learning through Alignment and
Uniformity on the Hypersphere’, ICML 2020
NCTA 2024 - 16th International Conference on Neural Computation Theory and Applications
530
