
Control of Biohybrid Actuators Using Neuroevolution
Hugo Alcaraz-Herrera
1 a
, Michail-Antisthenis Tsompanas
1 b
, Igor Balaz
2 c
and Andrew Adamatzky
1 d
1
Unconventional Computing Laboratory, University of the West of England, Bristol, BS16 1QY, U.K.
2
Laboratory for Meteorology, Physics and Biophysics, Faculty of Agriculture, University of Novi Sad,
Trg Dositeja Obradovica 8, Novi Sad, 21000, Serbia
Keywords:
Neuroevolution, NEAT, HyperNEAT, Genetic Algorithm, Biohybrid Actuator.
Abstract:
In medical-related tasks, soft robots can perform better than conventional robots because of their compliant
building materials and the movements they are able perform. However, designing soft robot controllers is not
an easy task, due to the non-linear properties of their materials. A formal design process is needed since human
expertise to design such controllers is not sufficiently effective. The present research proposes neuroevolution-
based algorithms as the core mechanism to automatically generate controllers for biohybrid actuators that
can be used on future medical devices, such as a catheter that will deliver drugs. The controllers generated
by methodologies based on Neuroevolution of Augmenting Topologies (NEAT) and Hypercube-based NEAT
(HyperNEAT) are compared against the ones generated by a standard genetic algorithm (SGA). In specific, the
metrics considered are the maximum displacement in upward bending movement and the robustness to control
different biohybrid actuator morphologies without redesigning the control strategy. Results indicate that the
neuroevolution-based algorithms produce better-suited controllers than the SGA. In particular, NEAT designed
the best controllers, achieving up to 25% higher displacement when compared with SGA-produced specialised
controllers trained over a single morphology and 23% when compared with general-purpose controllers trained
over a set of morphologies.
1 INTRODUCTION
Soft robotics is a sub-field of robotics that studies ma-
chines built with flexible and ductile materials, such
as silicone rubbers (Rus and Tolley, 2015). This
type of robots have demonstrated better performance
in specific tasks related to healthcare (Hsiao et al.,
2019), due to their morphology and behaviour that are
heavily inspired by living organisms.
Despite their promising applicability, soft robots
face significant challenges, i.e., defining an adequate
morphology design. Under a traditional approach of
robot designing, considerable time and material re-
sources are utilised since numerous alternative proto-
types are tested physically (Schulz et al., 2016). On
the other hand, under a soft robots approach, design-
ing process is more complex due to the materials’
flexibility and mechanical properties being non-linear
a
https://orcid.org/0000-0002-9991-662X
b
https://orcid.org/0000-0002-6607-7831
c
https://orcid.org/0000-0002-6831-9232
d
https://orcid.org/0000-0003-1073-2662
and difficult to characterise (Hiller and Lipson, 2014).
When a suitable design is found, the next step con-
sists of designing an appropriate controller for the soft
robot, a process that can be considered as intricate as
finding a suitable morphology. The required strate-
gies to control soft robots have two main considera-
tions: (i) the soft materials constituting the robot can
deform at every point, resulting in infinite degrees of
freedom, including bending, extension, contraction,
and torsion, and (ii) soft materials present non-linear
and time-dependent properties. These aspects make
modeling soft robot behaviour and movement a diffi-
cult task (Wang and Chortos, 2022).
A methodology that can assist the design of con-
trollers for soft robots which is worth investigat-
ing is Neuroevolution (NE). NE focuses on evolv-
ing the topology and weights of artificial neural net-
works (ANNs) employing a genetic algorithm (GA)
methodology. Arguably, the most efficient NE al-
gorithm has proved to be Neuroevolution of Aug-
menting Topologies (NEAT) (Stanley and Miikku-
lainen, 2002). Furthermore, under the rationale that
Alcaraz-Herrera, H., Tsompanas, M., Balaz, I. and Adamatzky, A.
Control of Biohybrid Actuators Using Neuroevolution.
DOI: 10.5220/0012919300003837
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Joint Conference on Computational Intelligence (IJCCI 2024), pages 197-204
ISBN: 978-989-758-721-4; ISSN: 2184-3236
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
197

natural structures are composed of shape repetition
and patters, an extension of NEAT was developed,
namely Hypercube-based Neuroevolution of Aug-
menting Topologies (HyperNEAT) (Stanley et al.,
2009). HyperNEAT evolves a singular type of ANNs
named Compositional Pattern-Producing Networks
(CPPNs), whose difference to traditional ANNs fo-
cuses around the use of periodic functions (e.g., sine
and square wave), in order to generate patterns, like
symmetry and repetition that help evolve more inter-
esting topologies (Stanley, 2007a).
The fundamental objective of the presented re-
search is assessing the suitability of NEAT and Hyper-
NEAT as design engines for controllers of biohybrid
actuators (BHAs), a particular type of soft robots’
components that are built utilising biological mate-
rial, such as tissues or cells. Specifically, we anal-
yse the capabilities of the NEAT and HyperNEAT to
design controllers whose objective is to induce an up-
ward bending movement to a given BHA. That BHA
may be embodied into a catheter for targeted drug de-
livery to areas of the human body that are difficult to
reach.
2 BACKGROUND
NEAT has been previously used as a controller design
engine in robotic applications. For instance, NEAT
is implemented to design controllers for a robot in a
crowded environment (Seriani et al., 2021). A ray-
casting model can be implemented in industrial robots
with relative acts as the robot’s perception, which can
perceive objects at the current time and has a memory
of previously perceived objects. Controllers are first
assessed in simulated environments and subsequently
in a minimal physical implementation. Results advo-
cate that controllers generated by NEAT converge to
a suitable design in both environments.
In another exemplar research, NEAT is applied
to design locomotive controllers (Tibermacine and
Djedi, 2014). The scope of the study focuses on vir-
tual creatures that are simulated in a physics engine
called Open, Dynamic Engine (ODE). The controllers
generated by NEAT are compared against controllers
evolved in a more standard approach and results indi-
cate that controllers designed by NEAT exhibit better
performance since they consider the locomotive fea-
tures of morphologies and tend to be more robust than
those generated by the traditional approach.
Finally, NEAT has also been utilised to de-
sign controllers for autonomous vehicles. For in-
stance, a reactive navigation hybrid controller for
non-holonomic mobile robots was studied (Caceres
et al., 2017). Experiments were conducted in a sim-
ulation platform developed by the authors and are
based on the kinematic model of a car-like robot. Re-
sults suggest that controllers designed by NEAT ex-
hibited the expected performance of controlling the
kinematics of car-like robots in an unknown envi-
ronment, avoiding obstacles and reaching the target
point.
Moreover, HyperNEAT has also been utilised to
design robot controllers, as well as their shapes.
For instance, a method that aims to find suitable
morphologies and controllers has been introduced
(Tanaka and Aranha, 2022). The method was tested
in four scenarios considering the adaptation level ob-
served in the robots used for experimentation. The
results suggested that the approaches can generate
morphologies and that their controllers are capable of
suitably performing on the given tasks.
Furthermore, HyperNEAT has been used to de-
sign locomotion controllers utilised by autonomous
crawler robots with flippers (Sokolov et al., 2017). In
order to evaluate their performance, controllers were
tested in the ROS/Gazebo simulator. The inputs of
CPPNs were Light Detection and Ranging (LIDAR)
data, the robot’s position, orientation, flipper angle,
and track velocities. The outputs were commands to
control the flipper angles and track velocities. The
results indicated that HyperNEAT-based controllers
help crawler robots navigate and overcome obstacles
in three-dimensional environments.
Finally, an implementation of HyperNEAT to de-
sign controllers for quadruped robots has been pro-
posed (Risi and Stanley, 2013). The model had the
morphologies of robots as input. Moreover, the out-
put was neural-network-based controllers capable of
working with different robot morphologies. The per-
formance of controllers was assessed utilising three
morphologies, and they were compared against static
controllers. Results suggested that HyperNEAT iden-
tified the relationship between morphologies and con-
troller architectures, which help to generate suitable
performance.
Inspired by the aforementioned works of employ-
ing NE for controlling different types of robots (i.e.,
crawlers, runners and even car-like) to achieve higher
displacement, the same methodology is tested here
on robots limited to angular-only movement. To the
best of the authors’ knowledge, this aspect has not
been tested before, and insights gained by this re-
search will assist the design methodology of robotic
controllers for tasks requiring precision movements,
such as medical applications.
ECTA 2024 - 16th International Conference on Evolutionary Computation Theory and Applications
198

3 NEUROEVOLUTION
Two of the most popular NE-based approaches are
utilised in this research. Namely, NEAT (Stanley and
Miikkulainen, 2002), and an extension of NEAT: Hy-
perNEAT (Stanley et al., 2009).
3.1 NEAT
A well-established method to train ANNs is back-
propagation of errors, whereas an alternative method
is utilising evolutionary optimisation methods. The
fitness functions of such methods can be the minimi-
sation of the output errors of ANNs. Namely, NE
iteratively applies selection, crossover and mutation
operators on a population of randomly initialised net-
works to discover the best performing one, after a
given amount of generations. NEAT algorithm was
conceived to alleviate three main “pathologies” ob-
served in previous NE algorithms (Stanley and Mi-
ikkulainen, 2002). Namely, (i) the lack of appro-
priate solution representations that would allow the
recombination of arbitrary network topologies; (ii)
preventing the premature disappearance of novel net-
work topologies discovered during evolution; and (iii)
avoiding the use of fitness functions to punish com-
plex topologies of individuals.
3.2 HyperNEAT
A well-established extension of NEAT is Hyper-
NEAT. This approach employs NEAT to evolve the
topology of a particular type of neural network known
by the term Compositional Pattern-Producing Net-
work (CPPN) (Stanley, 2007b). HyperNEAT evolves
CPPNs and takes advantage of their properties to re-
produce natural patterns observed in nature, such as
symmetry and repetition (Stanley et al., 2009). Two
critical differences exist between NEAT and Hyper-
NEAT: (i) Activation functions and (ii) Substrate.
Commonly, NEAT generates ANNs containing
hidden nodes that uniformly adapt the sigmoid as
their activation function. On the other hand, Hy-
perNEAT can use diverse activation functions in the
nodes within CPPNs. Examples of the possible ac-
tivation functions are trigonometric, periodic, and
Gaussian. Using different activation functions during
evolution allows for exploring a significantly more ex-
tensive search space of network topologies.
Due to the pattern reproduction capacity of
CPPNs, HyperNEAT can embody the geometry
within the domain of the problem. Consequently,
those geometrical aspects are considered to determine
the topology of ANNs. The geometric layout where
these ANNs are defined and where HyperNEAT oper-
ates is called substrate.
4 EXPERIMENTAL SETUP
The main objective of this research is to study the suit-
ability of NEAT and HyperNEAT in designing con-
trollers for BHAs. The capacity to induce an upward
bending movement in BHAs is evaluated as the pri-
mary suitability measure of each controller.
4.1 Voxelyze
BHAs are simulated in a physics engine called Voxe-
lyze, which simulates the physical response of BHAs
under specific conditions, such as gravity and ambient
viscosity (Hiller and Lipson, 2014). The source code
of Voxelyze is freely available and utilised in several
optimisation studies (Kriegman et al., 2020; Tsom-
panas and Balaz, 2024).
In order to evaluate the controllers designed by the
proposed methodologies, for the application of mov-
ing a catheter, one end of the BHA is considered fixed
in place, whereas the other is free to move under the
dictated expansion of the active material in its mor-
phology. Thus, to trace the position of the free end of
BHAs in the x, y, z axes during time t, Voxelyze has
been modified to represent BHAs with only one de-
gree of freedom in the yz plane (i.e., they only move
vertically). Furthermore, based on the findings of
previous research (Tsompanas and Balaz, 2024) and
laboratory constraints, BHAs are considered within a
passive enclosure.
The output of Voxelyze (i.e. the position of the
BHA’s free tip) is used to evaluate the performance of
CPPNs. Based on previous research (Alcaraz-Herrera
et al., 2024b), the dimensions of BHA, in terms of
voxels, are twenty units in the x axis and eight units
in the y and z axes. Figure 1 presents an example of
a BHA being simulated by the modified version of
Voxelyze.
4.2 Configuration Scheme
For NEAT and HyperNEAT, the population is com-
posed of 50 individuals (i.e., ANNs and CPPNs repre-
senting controllers) and each evolutionary trial lasted
200 generations. Moreover, the activation functions
utilised for experimentation are: sine, negative sine,
absolute value, negative absolute value, square, nega-
tive square, squared absolute value, negative squared
absolute value, sigmoid, clamped, cubical, exponen-
tial, Gaussian, hat, identity, inverse, logarithmic,
Control of Biohybrid Actuators Using Neuroevolution
199
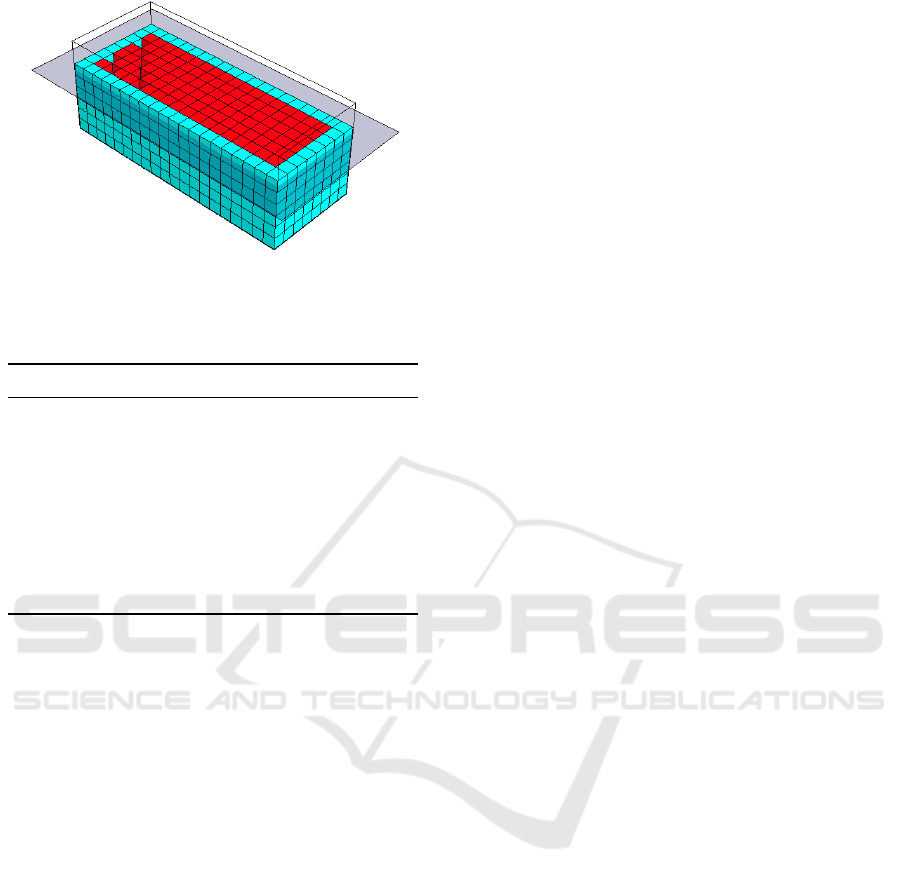
Figure 1: Example of an BHA simulated by Voxelyze.
Table 1: Parameters utilised to evolve CPPNs under NEAT
and HyperNEAT.
Parameter Value
compatibility threshold 3
compatibility disjoint coefficient 1.0
compatibility weight coefficient 0.5
maximum stagnation 25
survival threshold 0.2
activation function mutate rate 0.4
adding/deleting connection rate 0.2/0.1
activating/deactivating connection rate 0.5
adding/deleting node rate 0.2/0.1
ReLU, SeLU, LeLU, eLU, softplus, hyperbolic tan-
gent. The specific parameters employed for the evo-
lutionary process of CPPNs are presented in Table 1.
Furthermore, individuals are initialised with the
minimal topology possible: no hidden neurons and
input neurons fully connected to output neurons (sim-
ilar to (Tsompanas, 2024)).
4.2.1 NEAT Configuration
Due to BHAs being designed in a discrete three-
dimensional layout with two types of voxels repre-
senting different materials, the input of controllers
considers: (i) the coordinates for each point across
the layout and (ii) the type of material. By the term
voxel, the basic building block in Voxelyze is defined.
Each voxel can be either active (blue color in Fig. 1)
or contractile (red color). Furthermore, the output of
controllers is the phase offset of each voxel across
the layout, dictating the delay in the expansion be-
haviour of active voxels. Thus, under NEAT, CPPNs
are queried as follows:
CPPN(x
i
, y
i
, z
i
, m
i
) = pho
i
(1)
where the (x
i
, y
i
, z
i
) tuple represents the coordinates
of the i-th point in the three-dimensional layout and
m
i
represents the material of the appropriate voxel lo-
cated in the aforementioned point, which is encoded
as follows: 0, absence of a voxel; 1 passive voxel; 3
contractile voxel. Regarding pho
i
, it represents the
phase offset of the i-th point of the layout. In or-
der to provide a complete sinusoidal-based contrac-
tion movement, the output of CPPNs (i.e., controllers)
is clamped in the [−2π, 2π] range.
4.2.2 HyperNEAT Configuration
Under HyperNEAT, the first defining aspect is the
substrate (i.e., an ANN), which has four input neu-
rons due to the discrete three-dimensional layout
where BHAs are designed and the type of each voxel.
Furthermore, one output neuron is needed to pro-
vide the phase offset of each voxel across the three-
dimensional layout. Equation 2 describes how sub-
strates are queried:
substrate(x
i
, y
i
, z
i
, m
i
) = pho
i
(2)
where the (x
i
, y
i
, z
i
) tuple is the coordinates of the i-
th point in the three-dimensional layout. Moreover,
the m
i
variable is related to the voxel type, encoded as
before. The pho
i
variable is defined as in the above.
The next step consists of allocating the neurons
composing the substrate. A series of experiments
where the number of hidden layers and the number
of neurons per hidden layer is varied in the range
[3, 10] were conducted to find the optimal allocation.
Figure 2 depicts the design of the two-dimensional
substrate employed throughout the experiments de-
scribed in this research. Furthermore, the activation
function implemented for the neurons composing the
substrate is ReLU, since it induces a linear (or close to
linear) behaviour and exhibits representational spar-
sity properties (Glorot et al., 2011).
Due to the evaluation of individuals implying
a simulation procedure, the amount of computation
time is significant. Thus, a client-server implemen-
tation was used to take advantage of the distributed
computing capacities of this software architecture
(Alcaraz-Herrera et al., 2024a).
5 NEAT VS HyperNEAT
Three metrics are utilised to assess the suitability
of NEAT and HyperNEAT to design controllers for
BHAs: (i) studying the general performance of con-
trollers in terms of inducing an angular movement on
the yz plane to the BHA during a predefined simulated
time period; (ii) testing the robustness of controllers;
and (iii) analysing the complexity of controllers. Note
ECTA 2024 - 16th International Conference on Evolutionary Computation Theory and Applications
200
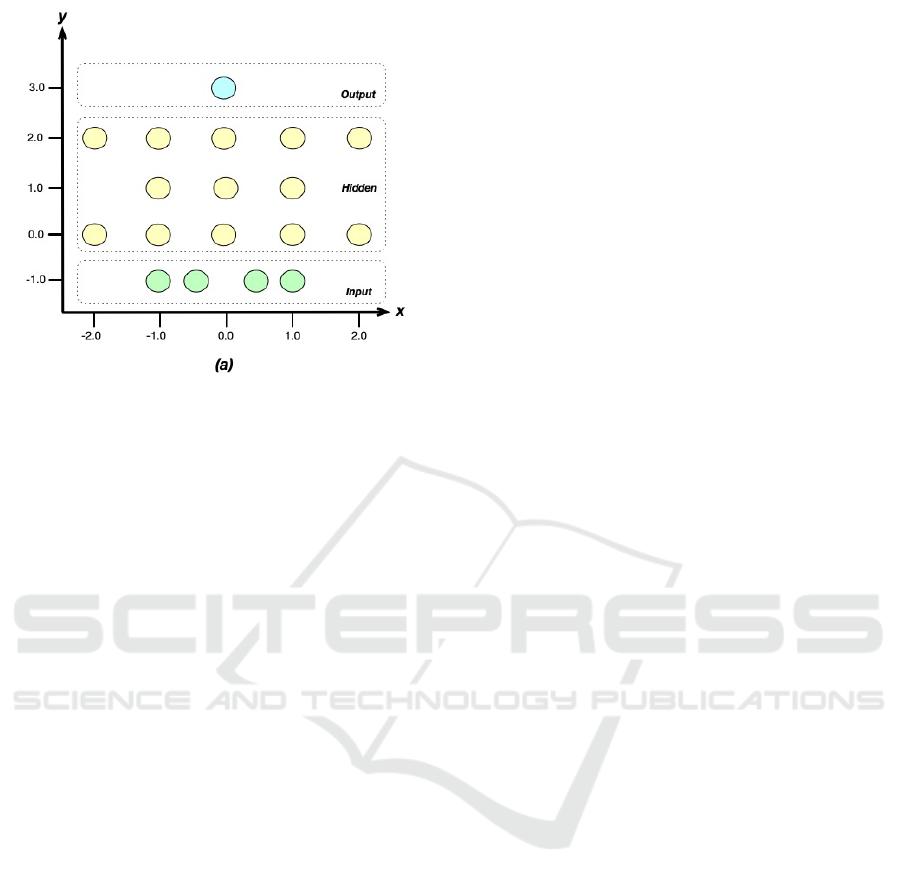
Figure 2: Substrate utilised under HyperNEAT to design
BHA controllers.
here that the displacement of BHAs is measured in
terms of the length of one voxel.
Moreover, a standard genetic algorithm (SGA)
is utilised as a baseline controller design engine.
In order to facilitate the implementation of the el-
ements composing the SGA (i.e., individuals, fit-
ness function, and genetic operators), an object-
oriented framework was employed (Alcaraz-Herrera
and Cartlidge, 2022). Individuals are represented by a
bi-dimensional array (i.e., a matrix) of real numbers in
the [−2π, 2π] range. Regarding the genetic operators,
the crossover implementation is two-point variation
with probability of 0.9. Regarding mutation, one el-
ement of the matrix is randomly chosen and replaced
by a random number within the [−2π, 2π] range. This
takes place with a probability of 0.1.
5.1 General Performance
In this research, the BHAs need to bend in a deter-
mined direction. The case study presented in this re-
search considers upward bending movement as the
target for BHAs controllers. These bending move-
ment is measured utilising the displacement observed
in the yz plane.
Here the general performance of SGA, NEAT,
and HyperNEAT in designing controllers capable of
inducing upward bending movements to BHAs was
analysed. The top three BHA morphologies discov-
ered in previous works (Alcaraz-Herrera et al., 2024b)
are used for experimentation. Figure 3 presents the
mean performance of the fittest controller with 95%
confidence interval depicted by the shaded regions
across 20 evolutionary trials under SGA, NEAT, and
HyperNEAT using three different morphologies: (i)
BHA 1 (Fig. 3-a); (ii) BHA 2 (Fig. 3-b); and (iii) BHA
3 (Fig. 3-c).
NEAT and HyperNEAT significantly outperform
SGA regardless of the BHA morphology utilised. The
data collected were tested and proved not to be nor-
mally distributed (Shapiro–Wilk test; p < 0.01). Us-
ing the Wilcoxon test, it is feasible to confirm that sig-
nificant differences in the performance between NE-
based approaches and SGA exist (paired Wilcoxon-
test; p < 0.01). Furthermore, NE-based approaches
found the fittest controller at the early stages of evo-
lution (i.e., at the first generations of the evolutionary
process), whereas SGA tends to gradually evolve at
a lower pace. In addition, although the difference in
performance between NEAT and HyperNEAT is not
clearly visible in all BHAs used, NEAT significantly
outperforms HyperNEAT (Shapiro–Wilk test, paired
Wilcoxon-test; p < 0.01).
Furthermore, the Kruskal-Wallis test is used to
confirm significant differences among the perfor-
mance of all approaches regardless of the BHA (p <
0.01). Consequently, is it possible to rank the perfor-
mance of the three approaches: NEAT > HyperNEAT
> SGA (Dunn’s test; p < 0.01).
Results suggest that NE-based approaches can de-
sign fitter controllers than those designed by SGA
since more elements of the domain problem are con-
sidered, namely, the morphology and material of
BHAs during evolution. Another relevant aspect that
arguably enhances the performance of NEAT and Hy-
perNEAT is the set of properties of CPPNs that help to
design controllers that induce upward bending move-
ments that follow a pattern considering the morphol-
ogy of the BHA.
5.2 Robustness
A controller can perform adequately inducing upward
bending of specific BHA morphologies. However,
performance may be different if the BHA morphology
changes. This experiment aims to test the robustness
of controllers under a more diverse set of morpholo-
gies (i.e., how suitable the controller’s capacity is to
induce upward bending movements regardless of the
BHA morphology) designed by SGA, NEAT, and Hy-
perNEAT. For each approach, 20 evolutionary trials
were performed.
Controllers are evaluated using the top nine BHAs
discovered in (Alcaraz-Herrera et al., 2024b). There-
fore, nine simulations are run utilising Voxelyze, each
with a different BHA and its phase offsets generated
by the controller. Thus, controllers’ robustness (i.e.,
aptitude) is calculated considering the displacement
observed in the yz plane of each simulation. Equa-
Control of Biohybrid Actuators Using Neuroevolution
201
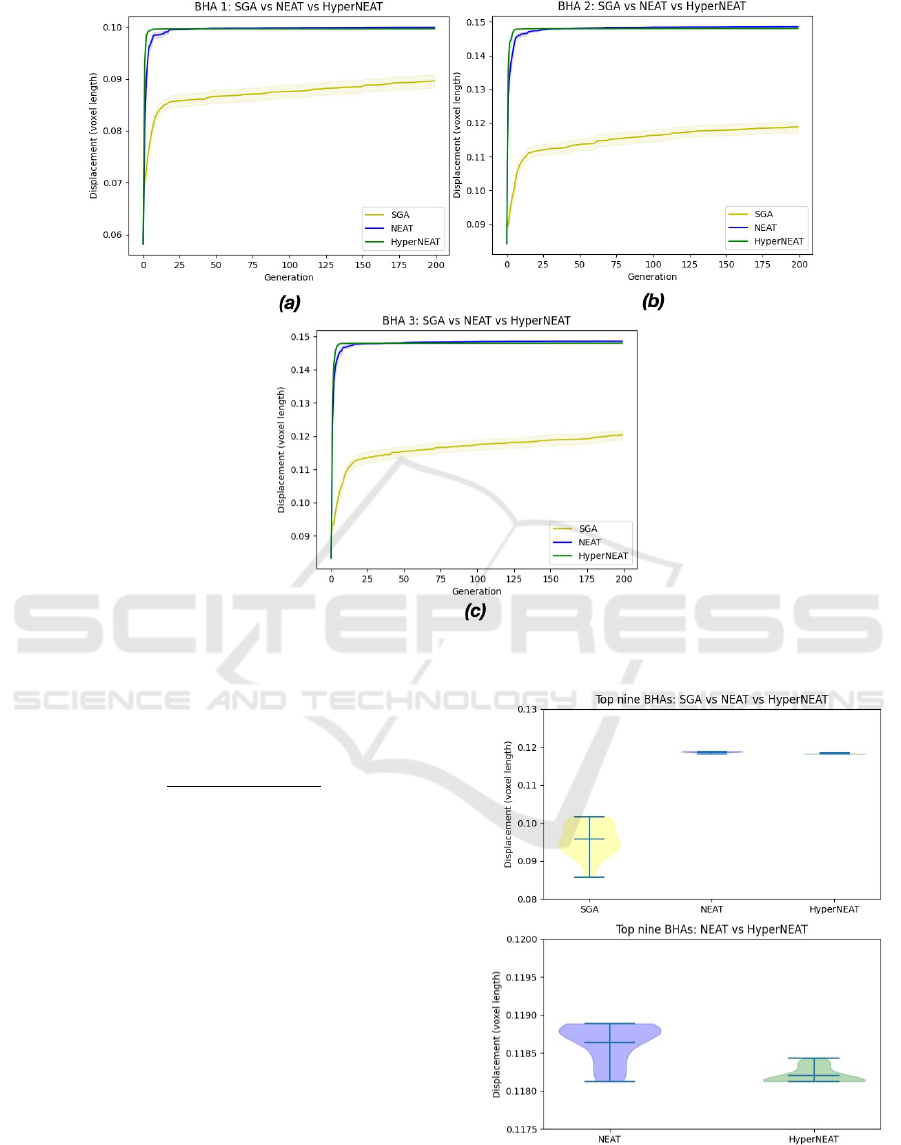
Figure 3: Mean general performance with ±95 confidence interval (shaded region) under SGA, NEAT, and HyperNEAT
using: (a) BHA 1; (b) BHA 2; and (c) BHA 3.
tion 3 defines how the aptitude of the controller c is
computed:
apt
c
=
∑
9
i=1
displacement
i
9
(3)
Figure 4 depicts violin plots comparing the dis-
placement induced by the fittest controller found
by SGA, NEAT and HyperNEAT. Each violin plot
presents median, maximum, minimum and kernel
density estimation of the frequency distribution of
values utilising nine different BHAs.
The displacement induced by all the controllers
exhibit significant differences. First, all the data
gathered are not normally distributed (Shapiro-Wilk
test; p < 0.01). Then, through the Kruskal-Wallis
test, it is feasible to confirm significant differences
among the displacement induced by the controllers
(p < 0.01). Consequently, a performance ranking can
be defined: NEAT > HyperNEAT > SGA (Dunn’s
test; p < 0.01).
Results indicate that despite the number of BHAs
involved during the evolutionary process, NE-based
approaches are more suitable for designing con-
trollers capable of inducing higher upward bending
Figure 4: Displacement observed in the yz plane of the top
nine BHAs induced by: top - SGA (left), NEAT (centre),
and HyperNEAT (right); bottom (close up) - NEAT (left),
and HyperNEAT (right).
ECTA 2024 - 16th International Conference on Evolutionary Computation Theory and Applications
202
Table 2: Mean displacement (in voxel lengths) achieved by
the fittest controller designed by SGA, NEAT and Hyper-
NEAT for one morphology and for a set of 9 morphologies.
Scenario SGA NEAT HyperNEAT
BHA 1 0.0896 0.0999 0.0996
BHA 2 0.1188 0.1485 0.1480
BHA 3 0.1202 0.1485 0.1479
Set of 9 0.0957 0.1186 0.1182
Table 3: Mean number of hidden nodes and connections of
the fittest controller designed by NEAT and HyperNEAT.
Approach Hidden Nodes Connections
NEAT 2 3
HyperNEAT 13 36
movements than the standard evolutionary approach.
Again, NEAT and HyperNEAT are more suitable
due to their capacity to consider the morphology and
material of BHAs when designing controllers. Fur-
thermore, CPPNs, the core of both techniques, allow
the production of patterns that have a significant con-
tribution to the emergence of more efficient move-
ment. Consequently, the upward bending movements
induced by NEAT and HyperNEAT controllers follow
a pattern based on the morphology of each BHA.
To better compare the results of the two previous
sections, Table 2 is provided.
5.3 Controller Complexity
Since the BHAs utilised for experimentation, rep-
resent soft robotics components that can be imple-
mented in real life (Alcaraz-Herrera et al., 2024b), the
controllers discovered in this study should be feasible
to be built. Thus, the less complex (i.e., fewer nodes
and connections) a network controller is, the simpler
and more efficient the controller device is.
A crucial aspect to consider for this experiment
is that under NEAT, controllers are represented by
CPPNs. In contrast, under HyperNEAT, substrates
(i.e. ANNs) represent the controllers. Furthermore,
SGA is not considered for this experiment due to
the poor performance exhibited previously. Table 3
shows the mean number of hidden nodes and connec-
tions composing the fittest controller across 20 evolu-
tionary trials under NEAT and HyperNEAT.
In general, HyperNEAT produces significantly
more complex controllers than NEAT due to the fixed
number of hidden neurons of the substrate where Hy-
perNEAT operates. This restricts the exploration of
the search space since it only finds the optimal num-
ber of connections, their weights, and the bias of neu-
rons. On the other hand, NEAT explores a broader
search space that includes the activation functions, the
number of neurons (and their bias), and the number of
connections (and their weights), arguably allowing it
to find more efficient network structures in terms of
complexity and performance. Due to the capacity of
NEAT to discover simpler controller networks it will
be preferred for implementing real-life controllers.
6 CONCLUSIONS
This work studies the capacity of NEAT and Hy-
perNEAT to produce suitable controllers for BHAs.
Their suitability is compared against a SGA. The per-
formance of the three approaches is analysed under
three metrics: (i) general performance (maximum up-
ward bending movement possible to three BHAs); (ii)
testing the robustness of controllers produced (maxi-
mum upward bending movement on nine BHAs); and
(iii) analysing their complexity. For all metrics, 20
evolutionary trials were conducted under the three ap-
proaches.
Results suggest that NEAT and HyperNEAT are
more suitable for designing controllers for BHAs than
SGA, not only for a single morphology but for numer-
ous alternative morphologies. In general, NE-based
approaches outperform SGA due to: (i) their abil-
ity to consider the morphology and the material of
BHAs when designing the controllers, (ii) their core
mechanisms are based on CPPNs, whose properties
help to produce control patterns that are significant in
the emergence of efficient movement (Cheney et al.,
2014).
Although the difference is minimal when the per-
formance of NEAT and HyperNEAT are compared,
NEAT demonstrates a more suitable performance.
Arguably, two factors affected the performance of
HyperNEAT: (a) the substrate design implemented for
experimentation, and (b) the absence of geometrical
aspects of the domain problem that could not be em-
bodied in the design of the substrate. Furthermore,
NEAT was able to design more compact and, hence,
more efficient controllers than HyperNEAT, due to the
fact that the search space included the number of neu-
rons, their connections and their activation functions.
In contrast, the search space, where HyperNEAT op-
erated, is more restricted since it only included the
connections in a fixed number of neurons with the
same activation function.
Future work directions considering the results
gathered from this research can explore the suitability
of the NE-based approaches in more realistic scenar-
ios where elements of the environment (e.g., viscos-
Control of Biohybrid Actuators Using Neuroevolution
203

ity and friction) are included during simulations. Fur-
thermore, adding periodic activation functions, such
as tangent and cosine, could induce other patterns
of more efficient upward bending movements. An-
other avenue of future work may focus on improving
the performance of HyperNEAT with a broader ex-
ploration of hyper-parameters, such as the number of
neurons, hidden layers, and activation functions used
to design the substrate.
ACKNOWLEDGEMENTS
This project has received funding from the European
Union’s Horizon Europe research and innovation pro-
gramme under grant agreement No. 101070328.
UWE researchers were funded by the UK Research
and Innovation grant No. 10044516.
REFERENCES
Alcaraz-Herrera, H. and Cartlidge, J. (2022). Exploration of
ontological representations for evolutionary computa-
tion. In 2022 IEEE Congress on Evolutionary Com-
putation (CEC), pages 1–8.
Alcaraz-Herrera, H., Tsompanas, M.-A., Adamatzky, A.,
and Balaz, I. (2024a). Neuroevolution algorithms ap-
plied in the designing process of biohybrid actuators.
https://arxiv.org/abs/2408.07671.
Alcaraz-Herrera, H., Tsompanas, M.-A., Adamatzky,
A., and Balaz, I. (2024b). Using neuroevo-
lution for designing soft medical devices.
https://arxiv.org/abs/2408.09107.
Caceres, C., Rosario, J. M., and Amaya, D. (2017).
Approach of kinematic control for a nonholonomic
wheeled robot using artificial neural networks and ge-
netic algorithms. In 2017 International Conference
and Workshop on Bioinspired Intelligence (IWOBI),
pages 1–6.
Cheney, N., MacCurdy, R., Clune, J., and Lipson, H.
(2014). Unshackling evolution: evolving soft robots
with multiple materials and a powerful generative en-
coding. ACM SIGEVOlution, 7(1):11–23.
Glorot, X., Bordes, A., and Bengio, Y. (2011). Deep sparse
rectifier neural networks. In Proceedings of the Four-
teenth International Conference on Artificial Intelli-
gence and Statistics, Proceedings of Machine Learn-
ing Research, pages 315–323.
Hiller, J. and Lipson, H. (2014). Dynamic simulation of soft
multimaterial 3d-printed objects. Soft robotics, 1(1).
Hsiao, J.-H., Chang, J.-Y., and Cheng, C.-M. (2019). Soft
medical robotics: clinical and biomedical applica-
tions, challenges, and future directions. Advanced
Robotics, 33(21):1099–1111.
Kriegman, S., Blackiston, D., Levin, M., and Bongard,
J. (2020). A scalable pipeline for designing recon-
figurable organisms. https://github.com/skriegman/
reconfigurable
organisms. Accessed: May 29, 2024.
Risi, S. and Stanley, K. O. (2013). Confronting the chal-
lenge of learning a flexible neural controller for a
diversity of morphologies. In Proceedings of the
15th Annual Conference on Genetic and Evolutionary
Computation, GECCO ’13, page 255–262.
Rus, D. and Tolley, M. T. (2015). Design, fabrication and
control of soft robots. Nature, 521(7553):467–475.
Schulz, A., Sung, C., Spielberg, A., Zhao, W., Cheng, R.,
Grinspun, E., Rus, D., and Matusik, W. (2016). In-
teractive robogami: An end-to-end system for design
of robots with ground locomotion. The International
Journal of Robotics Research, 36(10):1131–1147.
Seriani, S., Marcini, L., Caruso, M., Gallina, P., and Med-
vet, E. (2021). Crowded environment navigation with
neat: Impact of perception resolution on controller op-
timization. Journal of Intelligent & Robotic Systems,
101(2).
Sokolov, M., Afanasyev, I., Klimchik, A., and Mavridis,
N. (2017). Hyperneat-based flipper control for a
crawler robot motion in 3d simulation environment.
In 2017 IEEE International Conference on Robotics
and Biomimetics (ROBIO), pages 2652–2656.
Stanley, K. O. (2007a). Compositional pattern pro-
ducing networks: A novel abstraction of develop-
ment. Genetic Programming and Evolvable Ma-
chines, 8(2):131–162.
Stanley, K. O. (2007b). Compositional pattern pro-
ducing networks: A novel abstraction of develop-
ment. Genetic Programming and Evolvable Ma-
chines, 8(2):131–162.
Stanley, K. O., D’Ambrosio, D. B., and Gauci, J. (2009). A
Hypercube-Based Encoding for Evolving Large-Scale
Neural Networks. Artificial Life, 15(2):185–212.
Stanley, K. O. and Miikkulainen, R. (2002). Evolving neu-
ral networks through augmenting topologies. Evolu-
tionary Computation, 10(2):99–127.
Tanaka, F. and Aranha, C. (2022). Co-evolving morphology
and control of soft robots using a single genome. In
2022 IEEE Symposium Series on Computational In-
telligence (SSCI), pages 1235–1242.
Tibermacine, A. and Djedi, N. (2014). Neat neural net-
works to control and simulate virtual creature’s loco-
motion. In 2014 International Conference on Multi-
media Computing and Systems (ICMCS), pages 9–14.
Tsompanas, M.-A. (2024). Incremental growth on composi-
tional pattern producing networks based optimization
of biohybrid actuators. In International Conference on
the Applications of Evolutionary Computation (Part of
EvoStar), pages 275–289. Springer.
Tsompanas, M.-A. and Balaz, I. (2024). Outline of an evo-
lutionary morphology generator towards the modular
design of a biohybrid catheter. Frontiers in Robotics
and AI, 11.
Wang, J. and Chortos, A. (2022). Control strategies for soft
robot systems. Advanced Intelligent Systems, 4(5):88–
101.
ECTA 2024 - 16th International Conference on Evolutionary Computation Theory and Applications
204
