
Intuitive Human-Robot Interface: A 3-Dimensional Action Recognition
and UAV Collaboration Framework
Akash Chaudhary
1 a
, Tiago Nascimento
1,2 b
and Martin Saska
1 c
1
Faculty of Electrical Engineering, Czech Technical University in Prague, Technicka 2, 166 27 Prague, Czech Republic
2
Universidade Federal da Para
´
ıba, Brazil
Keywords:
Human-Robot Interaction, Unmanned Aerial Vehicles, Gesture Recognition.
Abstract:
Harnessing human movements to command an Unmanned Aerial Vehicle (UAV) holds the potential to revo-
lutionize their deployment, rendering it more intuitive and user-centric. In this research, we introduce a novel
methodology adept at classifying three-dimensional human actions, leveraging them to coordinate on-field
with a UAV. Utilizing a stereo camera, we derive both RGB and depth data, subsequently extracting three-
dimensional human poses from the continuous video feed. This data is then processed through our proposed
k-nearest neighbour classifier, the results of which dictate the behaviour of the UAV. It also includes mech-
anisms ensuring the robot perpetually maintains the human within its visual purview, adeptly tracking user
movements. We subjected our approach to rigorous testing involving multiple tests with real robots. The
ensuing results, coupled with comprehensive analysis, underscore the efficacy and inherent advantages of our
proposed methodology.
1 INTRODUCTION
In the rapidly evolving field of robotics, intuitive
human-robot interaction (HRI) remains a pivotal chal-
lenge. The ability for robots to accurately interpret
and respond to human actions is crucial for advanc-
ing their integration into diverse applications, from in-
dustrial automation (Vysocky and Novak, 2016) and
healthcare (Mohebbi, 2020) to agriculture (Vasconez
et al., 2019) and autonomous vehicles (Mokhtarzadeh
and Yangqing, 2018). Traditional control interfaces,
such as joysticks and remote controllers, often fail to
provide the natural, seamless interaction that users re-
quire. This gap underscores the need for more intu-
itive and user-friendly methods to enhance human-
robot collaboration, particularly in the context of Un-
manned Aerial Vehicles (UAVs).
Recent advancements in action recognition and
human-robot collaboration have shown significant
promise in addressing these challenges. For instance,
research on annotating human actions in 3D point
clouds has demonstrated the importance of precise
and flexible data for collaborative tasks with industrial
a
https://orcid.org/0000-0001-7857-7641
b
https://orcid.org/0000-0002-9319-2114
c
https://orcid.org/0000-0001-7106-3816
Figure 1: A Group of UAVs controlled by a human operator
in an open field.
robots, emphasizing the potential of 3D data to im-
prove HRI systems (Krusche et al., 2023). Similarly,
the integration of natural language instructions and
3D gesture recognition has enhanced the intuitiveness
of human-robot interaction, making it more effective
for industrial applications by facilitating a more natu-
ral communication interface (Park et al., 2024). Stud-
ies focusing on end-to-end systems for human-UAV
interaction highlight the relevance of intuitive con-
26
Chaudhary, A., Nascimento, T. and Saska, M.
Intuitive Human-Robot Interface: A 3-Dimensional Action Recognition and UAV Collaboration Framework.
DOI: 10.5220/0012921300003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 2, pages 26-35
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

trol mechanisms in field applications, showing how
3D gestures can be effectively used to control UAVs
in real-time scenarios (Jiao et al., 2020). Addition-
ally, the use of intuitive interaction systems, such as
RFHUI, highlights the significance of gesture recog-
nition in enhancing the ease of operation and control
of UAVs in 3D space (Zhang et al., 2018).
Despite these advancements, interpreting human
gestures and translating them into robotic actions re-
main significant hurdles. The complexity of human
movements and the variability in their execution pose
challenges for robotic systems, particularly those with
limited computational power, such as UAVs. Our
research aims to bridge this gap by proposing a
novel methodology for real-time, low computation-
ally expensive, three-dimensional action recognition
and UAV collaboration. By leveraging stereo cam-
eras to capture both RGB and depth data, we can
extract and classify three-dimensional human poses
from continuous video feeds. This approach enables
the UAV to accurately interpret human movements
and respond appropriately 1, thereby enhancing the
intuitiveness and effectiveness of human-UAV inter-
action. Our main contributions are:
1. A new method to estimate three-dimensional full-
body pose from available 2D poses.
2. A proposed feature vector space tailored for Hu-
man Motion Recognition.
3. A unique, fast and lightweight human motion
classifier suitable for UAVs with limited comput-
ing power.
2 RELATED WORKS
Human-robot interaction (HRI) offers a myriad of
methodologies. Among these, the most intuitive is the
teleoperation of a robot through a physical controller.
Yamada et al.(Yamada et al., 2015) employ this strat-
egy by integrating it with virtual reality to direct
robots in construction scenarios. Conversely, Sathiya-
narayanan et al.(Sathiyanarayanan et al., 2015) har-
ness a wearable armband, translating its gestures into
commands for robot systems. For individuals with
disabilities, voice-controlled systems present an in-
valuable solution. Gundogdu et al.(Gundogdu et al.,
2018) pioneered such a system, facilitating the op-
eration of prosthetic robot arms. Our proposed ac-
tion classification method adeptly amalgamates RGB
video data with depth video output, enabling the clas-
sification of 3D human movements. Our prior re-
search (Chaudhary et al., 2022) explored a similar do-
main, but was constrained to 2D data, thereby limiting
the dominion of the user over the robot and impeding
optimal performance. Our tailored feature space for
k-Nearest Neighbor further enhances its effectiveness
even amidst intricate actions by using depth informa-
tion, a custom feature space, and fast lookup times
during the classification process.
In the realm of sequence classification for human
motion classification, Celebi et al. (Celebi et al.,
2013) marked a significant advancement by intro-
ducing a weighted Dynamic Time Warping (DTW)
methodology that achieved a remarkable accuracy of
96%, a substantial improvement from the preceding
state-of-the-art’s 62.5%. Following this, Rwigema
et al. (Rwigema et al., 2019) refined the system by
integrating a differential evolution strategy to opti-
mize DTW’s weightings. This enhanced approach
achieved a stellar accuracy of 99.40%. However, its
extended processing time posed challenges for real-
time classification applications. In parallel, Schneider
et al. (Schneider et al., 2019) melded DTW with the
one-nearest neighbour technique for movement clas-
sification. Their methodology closely aligns with our
approach, prompting a comparative analysis between
their method and ours to discern our method’s effi-
cacy. Additionally, Yoo et al. (Yoo et al., 2022)
demonstrated rapid processing capabilities in their
classification system, although it necessitated an aux-
iliary IMU sensor for optimal performance. Addition-
ally, their system is limited to palm-action classifica-
tion. Our proposed approach endeavours to address
the trifecta of challenges: processing speed, accuracy,
and sensor dependency, offering a holistic solution in
the domain of human motion recognition.
3 METHODOLOGY
Our overarching ambition is to architect a method
that is apt for deployment on flying robots and pro-
ficient in human detection, action classification, and
the subsequent translation of these actions into robotic
tasks. Given the inherent computational limitations of
UAVs, the challenge lies in devising a classifier that
synergizes accuracy with computational efficiency.
A salient feature of our methodology is its
prowess in classifying 3D actions. This capability
augments the spectrum of detectable movements, of-
fering an enriched, intuitive user interaction. It not
only mitigates potential classification errors where 2D
projections might be misleading but also empowers
the system to discern directional nuances from ac-
tions, granting users refined control over the trajectory
of the robot.
Structured methodically, our approach is seg-
Intuitive Human-Robot Interface: A 3-Dimensional Action Recognition and UAV Collaboration Framework
27
3D Pose
Feature Vector
Encoder
Pose Normalizer
Autoencoder
RealSense
Camera
Mediapipe
2D Pose Estimation
Pose Converter
2D to 3D pose
Depth
Image
RGB
Image
2D
pose
Human Operator
Pose Estimator Human Robot Coordinator
DTW Distance
Calculator
Classifier Leader Drone
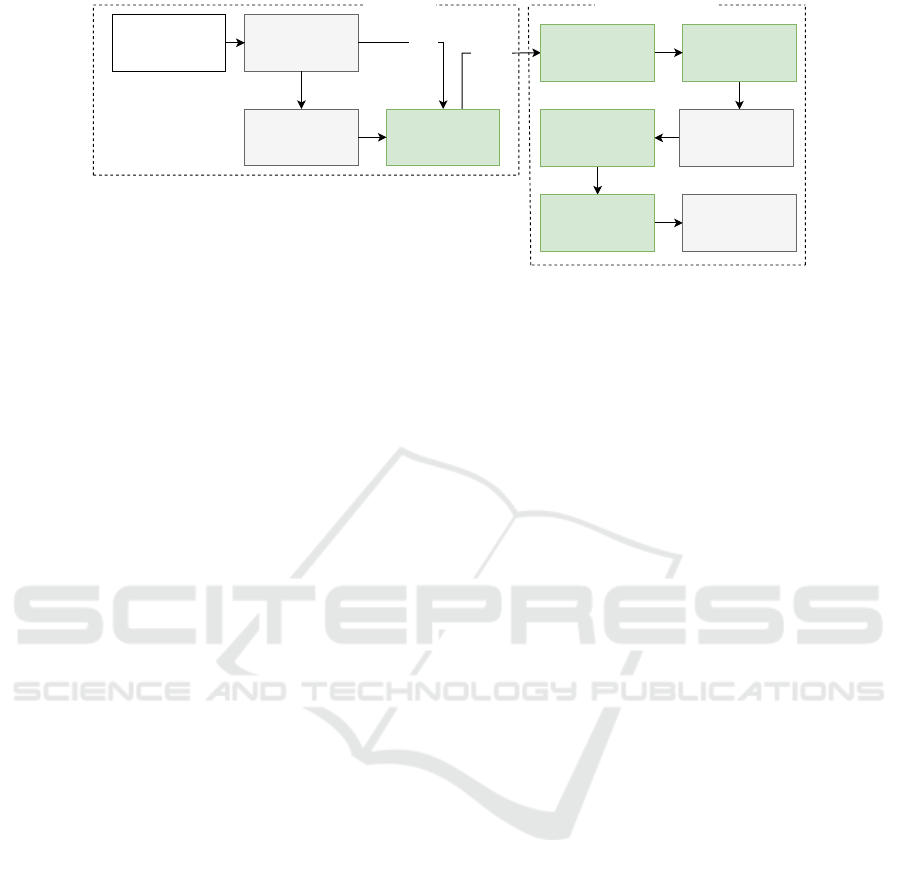
Figure 2: Flowchart depicting the action classifier and its use in UAV control, with the green blocks depicting our contribution.
mented into three core modules: Pose Estimation, Ac-
tion Classification and UAV Control. An overview of
our proposed approach can be seen in Fig. 2.
4 POSE ESTIMATION
The recognition of static gestures can be achieved ei-
ther directly from RGB images via neural networks,
or by distilling skeletal data and applying subse-
quent functions to this data for classification. For the
3D representation, we initially harness a pre-existing
model to derive 2D poses from live video and subse-
quently use depth images to gauge the distance of the
pose joints from the camera.
4.1 2D Pose Estimation
Our choice was to use MediaPipe, an implementa-
tion rooted in BlazePose (Bazarevsky et al., 2020).
This Google-based pose estimator is adept at extract-
ing 2D pose information from an RGB image in a live
video stream, capturing 33 key landmarks of human
anatomy. Calibration in MediaPipe is anchored on the
’Vitruvian Man’, ensuring accurate scale and orienta-
tion recognition. This precision is paramount- espe-
cially in aerial robotics, where UAV movement can
result in a non-horizontal camera orientation relative
to the ground.
MediaPipe operates in a distinct fixed-rate loop,
processing the concurrent image. If image callbacks
outpace the MediaPipe loop rate, some frames might
be skipped. Despite this, our onboard system man-
aged a commendable 30 Hz MediaPipe loop fre-
quency, ensuring near-real-time responsiveness.
4.2 3D Pose Estimation
Our methodology leverages 2D poses to predict the
z-coordinate for each landmark. Assuming the cam-
era plane as the X-Y plane, each body pose keypoint
corresponds to a coordinate (x,y). Beyond just RGB,
the Intel Realsense also provides depth images, albeit
with a slight misalignment. By aligning the depth im-
age with the RGB counterpart, we ensure a precise
correspondence between them.
The z-coordinate is deduced by overlaying the 2D
poses on the depth image. An area surrounding each
landmark is considered, factoring in the surrounding
pixels for the best z-coordinate estimate. The area
of consideration inversely correlates with the distance
from the camera. This necessitates an initial estima-
tion of this distance, achieved by superimposing the
coordinates of the shoulders and hips on the depth im-
age, creating a bounding quadrilateral. Given the po-
tential for background inclusion, we opt for the first
quartile average of the depth values, excluding back-
ground measurements.
Given the output from an RGB-D camera like
Realsense, each pixel’s correspondence to an actual
physical area varies with the distance. At a dis-
tance of 1 meter, each pixel represents an area of
1.5mm × 1.5mm, whereas at 6 meters, it is 9mm ×
9mm. With human proportions in consideration, we
scale the number of pixels to match a 90mm × 90mm
area. The subsequent z-coordinate estimation, com-
bined with the MediaPipe output, yields a compre-
hensive 3D pose.
5 FULL-BODY ACTION
CLASSIFICATION
Given the computational constraints on our fleet of
UAVs, the emphasis is on a lightweight algorithm that
retains accuracy. A balance is struck with a custom
k-nearest Neighbor (kNN) classifier. Our approach
to action classification is holistic, beginning with the
careful design of a feature space. By leveraging the
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
28

relationship between several joints in 3D space and
in time, we derive a representative feature vector that
encapsulates the dynamics of human posture. The
core of our methodology adopts a two-stage classi-
fication approach. In the initial stage, Feature embed-
ding translates pose landmarks into meaningful vec-
tor space. Autoencoders are then employed to reduce
the dimensionality of the embeddings. Subsequently,
Dynamic Time Warping (DTW) is used for a refined
comparison, accounting for potential temporal vari-
ations and guaranteeing the precise alignment of se-
quences. This comprehensive strategy ensures a bal-
ance between computational efficiency and classifica-
tion accuracy, providing a robust solution for human
action recognition. The steps of classification are de-
tailed in sections 6 and 7.
6 FEATURE SPACE DESIGN
In the realm of human pose estimation and analysis,
the extraction of meaningful features from detected
landmarks is of prime importance. The proposed
methodology focuses on extracting embeddings from
13 key anatomical landmarks, which are represented
by their 3D coordinates (x,y,z).
6.1 Landmarks Identification
The identified landmarks in the human body are as
follows: Nose, Left and Right Shoulder, Left and
Right Elbow, Left and Right Wrist, Left and Right
Hip, Left and Right Knee, and Left and Right Heel.
6.2 Pose Normalization
To ensure consistency across different poses and indi-
viduals, the detected landmarks undergo a normaliza-
tion process. The normalization is performed in three
stages:
1. Translation Normalization: The landmarks are
translated such that the centre of the pose (mid-
point between the hips) is at the origin.
2. Scale Normalization: The landmarks are scaled
based on the size of the torso or the maximum dis-
tance from any landmark to the pose centre, mul-
tiplied by a given torso size multiplier.
3. Orientation Normalization (optional): The
landmarks are rotated to align the vector connect-
ing the hip centre to the shoulder centre with a pre-
defined target direction, ensuring an upright orien-
tation of the pose.
6.3 Embedding Calculation
For the efficient extraction of features from these
landmarks, an EmbeddingCalculator class has been
utilized. In constructing the feature space for action
classification, we prioritized features with inherent re-
silience to noise and occlusions, essential in 3D pose
estimation. Selection focused on relative positions
and orientations between joints, as these are less sen-
sitive to occlusions and provide a stable reference in
noisy data. Additionally, incorporating temporal fea-
tures like joint velocity and acceleration helps smooth
out noise over time. Depth information plays a crucial
role in enhancing occlusion handling, allowing for a
more accurate estimation of partially visible actions.
This strategic selection ensures our classification re-
mains robust across diverse and challenging condi-
tions.
1. Single Joint Operations: Processes features de-
rived from individual landmarks.
2. Joint Pair Operations: Processes features de-
rived from pairs of landmarks.
3. Tri Joint Operations: Processes features derived
from groups of three landmarks.
6.3.1 Single Joint Operations
For each landmark, the following are calculated:
• Joint Vector: Directly takes the 3D coordinates
of the landmark. Provides the spatial positioning
necessary for accurate pose recognition, crucial
for interpreting directional UAV commands based
on limb orientation.
Joint Vector = landmarks[i] (1)
where i is the index of the landmark in the prede-
fined list.
• Joint Velocity (v): The rate of change of the
joint’s position with respect to time. Both veloc-
ity and acceleration are essential for distinguish-
ing dynamic gestures from static poses, enabling
the UAV to interpret the urgency or intended pace
of human commands. It is calculated as:
v =
current joint vector − previous joint vector
current timestamp − previous timestamp
(2)
• Joint Acceleration (a): The rate of change of a
joint’s velocity with respect to time. It is com-
puted as:
a =
v − previous v
current timestamp − previous timestamp
(3)
Intuitive Human-Robot Interface: A 3-Dimensional Action Recognition and UAV Collaboration Framework
29

• Joint Vector Angle: The angle between the joint
vector and each of the coordinate axes (x, y, z).
Offers insights into the limb orientation, critical
for understanding gesture directionality and en-
suring precise UAV response to commands like
vertical takeoff or horizontal movement. For a
given joint vector v and axis a, the angle θ is com-
puted using the dot product:
θ = arccos
v · a
∥v∥∥a∥
(4)
• Joint Angular Velocity: The rate of change of
a joint’s vector angle with respect to time. Joint
angular velocity and acceleration help the sys-
tem gauge the smoothness or abruptness of move-
ments, aiding in the interpretation of gesture ur-
gency for immediate or deliberate UAV actions.
• Joint Angular Acceleration: The rate of change
of a joint’s angular velocity with respect to time.
• Displacement Vector: The change in position of
the joint from its previous position. Indicates the
trajectory of joint movements, guiding the UAV in
adjusting its flight path to align with the operator’s
intended direction.
6.3.2 Joint Pair Operations
For each pair of landmarks, the following are com-
puted:
• Joint Pair Vector: The difference in the 3D co-
ordinates of the two landmarks. Provides a rela-
tional understanding of body posture by examin-
ing vectors between pairs of joints, aiding in the
nuanced differentiation of gestures for accurate
UAV command interpretation.
Joint Pair Vector = landmark[ j] − landmark[k]
(5)
where j and k are the indices of the two land-
marks.
• Joint Pair Velocity, Acceleration, Vector Angle,
Angular Velocity, and Angular Acceleration:
These are calculated similarly to the single joint
operations, but are applied to the joint pair vector.
6.4 Tri Joint Operations
Given the three landmarks A, B, and C, we can define
two vectors:
⃗
AB = B − A (6)
⃗
BC = C − B (7)
6.4.1 Tri Joint Angle
The angle θ between two vectors
⃗
AB and
⃗
BC is given
by:
θ = arccos
⃗
AB ·
⃗
BC
∥
⃗
AB∥∥
⃗
BC∥
!
(8)
where
⃗
AB ·
⃗
BC is the dot product of the two vectors.
The normal to the plane containing A, B, and C is
given by the cross product of the vectors
⃗
AB and
⃗
BC:
⃗
N =
⃗
AB ×
⃗
BC (9)
The unit normal vector
ˆ
N is then:
ˆ
N =
⃗
N
∥
⃗
N∥
(10)
The tri joint angle Θ (or the feature we are consid-
ering) is then a combination of θ and
ˆ
N, which could
be represented as:
Θ =
ˆ
N × θ (11)
Our selection of the feature vector was grounded
in its capability to uniquely represent the anatomi-
cal structure and dynamics. It captures the geometric
configuration of poses involving bends or twists, en-
abling complex gesture recognition for sophisticated
UAV manoeuvre commands. The unit normal vector
distinctively identifies the plane in which rays con-
necting a landmark to its neighbouring joints reside.
Concurrently, the cosine of the angle effectively cap-
tures the relative positioning of these rays. By taking
the product of these two entities, we obtain a singular,
robust feature vector. This vector augments the fea-
ture space, bolstering our ability to discern and clas-
sify sequences with heightened precision.
6.4.2 Tri Joint Angular Velocity
The angular velocity ω for the tri joint angle is the rate
of change of Θ with respect to time:
ω =
∆Θ
∆t
(12)
6.4.3 Tri Joint Angular Acceleration
The angular acceleration α for the tri joint angle is the
rate of change of ω with respect to time:
α =
∆ω
∆t
(13)
6.5 Feature Vector Extraction and
Normalization
Upon processing the normalized landmarks with the
embedding calculator, we obtain the primary feature
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
30

vectors, as explained in the previous sub-sections.
These vectors, imbued with the dynamics of human
movement, are central to our classification scheme.
To ensure a consistent representation across the
dataset, we calculate certain parameters. Specifically,
for each embedded sample, we ascertain its minimum
(min) and maximum (max) values. These extremi-
ties are extracted from a concatenated array of em-
beddings, which is aggregated frame by frame from
each sample.
Post parameter estimation, we normalize the fea-
ture vectors using min-max scaling. This normaliza-
tion is pivotal in ensuring that no specific feature over-
shadows others during the classification process. By
mapping the features to a range between -1 and 1, we
achieve uniformity in their magnitudes while main-
taining their sign.
Integrating these features into our classification
framework allows for an advanced, nuanced under-
standing of human motions, ensuring the UAV ac-
tions are tightly coupled with the operator’s intent.
This synergy between human gestures and UAV re-
sponse is fundamental for applications requiring intu-
itive, real-time robot control.
7 ENHANCED K-NEAREST
NEIGHBOR CLASSIFIER
THROUGH DIMENSIONALITY
REDUCTION
Our innovative approach to action classification com-
bines the strengths of dimensionality reduction via
autoencoders and an augmented k-nearest Neigh-
bor (kNN) algorithm integrated with Dynamic Time
Warping (DTW). This two-step methodology is tai-
lored for varying computational efficiency and accu-
racy requirements.
7.0.1 Dimensionality Reduction with
Autoencoders
In the first pathway, we deploy a deep autoencoder
for significant dimensionality reduction of the input
space. The autoencoder architecture comprises a se-
ries of dense layers that form an encoding phase,
transitioning from an input dimension D
input
to a re-
duced latent dimension D
latent
, where D
latent
≪ D
input
.
Formally, the encoder function E : R
D
input
→ R
D
latent
compresses the data, and the decoder function D :
R
D
latent
→ R
D
input
aims to reconstruct the original data.
The reconstruction loss is minimized, L
reconstruction
=
∥X −D(E(X ))∥
2
2
, where X denotes the input data.
After dimensionality reduction, the latent repre-
sentations are processed through a kNN classifier aug-
mented with DTW as the similarity metric, enhancing
accuracy and making it suitable for precision-critical
scenarios.
7.1 Dynamic Time Warping (DTW)
Following the encoding of the candidate set C, we
refine our matches employing the DTW algorithm.
The DTW distance between two sequences S and S
′
is computed as:
D
DTW
(S,S
′
) = min
∑
(i, j)∈path
d(s
i
,s
′
j
) (14)
Here, d(s
i
,s
′
j
) denotes the Euclidean distance be-
tween the respective feature vectors, while the ”path”
symbolizes the optimal alignment between the se-
quences.
7.2 Classification
Post the DTW filtering, the sequences in our final
shortlist dictate the classification outcome. Given the
frequency distribution of each class within the short-
list, the class exhibiting the highest prevalence is des-
ignated to the incoming sequence. Mathematically,
for an incoming sequence S, the assigned class C
∗
is:
C
∗
= arg max
c∈Classes
Frequency(c,Shortlist) (15)
The selection of k in the kNN classifier is critical for
the balance between noise sensitivity and the classi-
fier’s generalization ability. We determined the opti-
mal k empirically using a cross-validation approach
on various dataset segments to achieve a balance that
maximizes classification performance while minimiz-
ing error rates. The augmentation of kNN with Dy-
namic Time Warping (DTW) further enhances its sen-
sitivity to the temporal dynamics of actions, ensur-
ing that the dimensionality reduction does not com-
promise the classifier’s ability to distinguish between
similar movements.
7.3 Mathematical Formulation and
Empirical Evaluation
Our methodology was empirically evaluated against
the UTD-MHAD(Chen et al., 2015) dataset to
quantify the performance metrics of accuracy and
computational efficiency. The autoencoder-based
method focused on reconstruction loss and classi-
fication accuracy, utilizing the formula Accuracy =
Intuitive Human-Robot Interface: A 3-Dimensional Action Recognition and UAV Collaboration Framework
31

T P+T N
T P+T N+FP+FN
, where T P, T N,FP, and FN represent
true positives, true negatives, false positives, and false
negatives, respectively.
8 UAV CONTROL
The UAV continuously monitors the position of the
human and does so in two steps. In the first step, it
tracks the operator’s position on the video feed and
perpetually corrects its heading, such that the human
remains in the centre of its field of view. The next
step, it monitors the distance of the human from the
drone and tries to maintain a set distance, thereby
eliminating the need for the human to stay in one
place. The UAV is able to do this while simultane-
ously receiving commands from the human’s actions
and performing them.
9 RESULTS
9.1 Method Verification and
Benchmarking
To ensure the robustness and reliability of our pro-
posed method, we initially subjected it to rigorous
benchmarking. Several performance metrics were
employed to verify the efficiency and accuracy of our
classifier.
Performance Metrics:
• Accuracy: The overall rate of correctly classified
human movements among all classifications.
• F1 Score: A weighted average of precision and
recall, providing a balance between false positives
and false negatives.
• Confusion Matrix: A detailed breakdown of true
positives, false positives, true negatives, and false
negatives.
• Computational Time: The time taken for the
classifier to process an input and generate an out-
put.
The performance metrics are summarized in Ta-
ble 1. These tests were run on the same Intel NUC
that is present in our UAVs (Hert et al., 2023), and
therefore accurately reflect the ground reality. The ap-
proach was tested on the UTD-MHAD Dataset (Chen
et al., 2015), which consists of 27 classes. We also
conducted tests with a reduced number of classes to
directly compare our method with those in (Schneider
et al., 2019). Six classes were chosen for this compar-
ison, with one additional class (a8) added to evaluate
its effect on algorithm performance. These 7 actions
were, a1: Arm swipe to the left, a6: Cross arms in
the chest, a7: Basketball shoot, a8: Hand draw x, a9:
Hand draw circle (clockwise), a24: Sit to stand, a27:
Forward lunge.
Two versions of the proposed approach were
tested on the dataset. The Heavy version utilizes the
full set of encodings and is expected to be very accu-
rate, but considerably slower. The encoded version in-
corporates dimensionality reduction, providing faster
classification at slightly lower accuracy. This version
offered a good balance between accuracy and compu-
tational time for real-time classification. The insights
drawn from this evaluation illuminate the trade-offs
between accuracy and computational demands, guid-
ing the selection of the optimal configuration for spe-
cific application scenarios.
Heavy Configuration: Precision at the Cost of
Computational Efficiency. The Heavy configura-
tion (characterized by its utilization of the full set
of encodings) demonstrated remarkable accuracy and
F1 scores across all evaluated class groupings. It
achieved a pinnacle of classification precision in the
6-class setup, with an accuracy of 98.72% and an
F1 score of 99. However, this high degree of preci-
sion comes at a significant computational cost. The
total time for processing 27 classes was recorded at
360.44 seconds, with a per-case time exceeding 2000
ms. This considerable computational demand demon-
strates the Heavy configuration’s limited applicability
in real-time or resource-constrained scenarios.
Encoded Configuration: A Pragmatic Balance.
Emerging as the balanced contender, the Encoded
configuration significantly reduces computational
time without drastically compromising on accuracy.
For 6 classes, it maintained an impressive accuracy of
97.44% and an F1 score of 97, with a markedly re-
duced per-case time of approximately 38 ms. This
configuration adeptly balances computational effi-
ciency and precision, making it an ideal candidate
for real-time applications. While notable, the dip in
accuracy to 83.24% for 27 classes still positions the
Encoded configuration as a robust option, capable of
handling a diverse range of movements with consid-
erable accuracy.
Discussion on Trade-offs and Configuration Selec-
tion. The analysis of the three configurations high-
lights a fundamental trade-off between computational
efficiency and accuracy. The Heavy configuration,
while highly accurate, may not be feasible for real-
time applications due to its significant computational
demands. The Encoded configuration stands out as
the optimal choice for applications requiring a harmo-
nious balance between accuracy and computational
speed, offering high performance without substantial
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
32
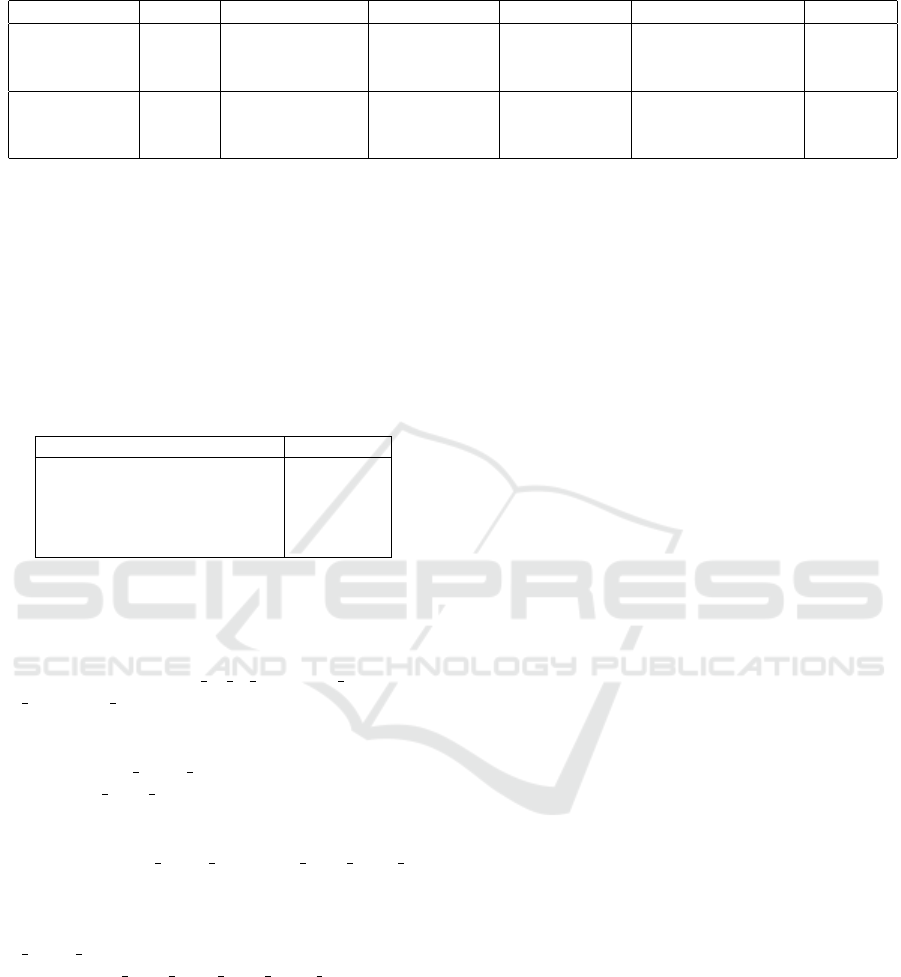
Table 1: Performance metrics of the proposed method.
Configuration Classes Test/Train cases Accuracy (%) Total Time (s) Per case Time (ms) F1 Score
Heavy 27 173/688 98.27 360.44 2083 98
6 39/153 98.72 59.03 1513 99
7 45/178 95.56 71.71 1594 96
Encoded 27 173/688 83.24 23.82 138 84
6 39/153 97.44 1.4896 38 97
7 45/178 86.67 1.7458 39 87
sacrifices. For real-time applications, the Encoded
configuration’s balanced performance profile makes
it exceptionally suitable. It provides a viable solu-
tion that accommodates the need for quick processing
times, while still maintaining a high level of accuracy.
This balance is crucial for deploying efficient and
responsive systems in dynamic environments where
both precision and speed are essential.
Table 2: Comparison of accuracy with state-of-the-art meth-
ods.
Method Accuracy (%)
Classical 60
Schneider et. el. (Schneider et al., 2019) 63-76
Rwigema et al. (Rwigema et al., 2019) 99.4
Celebi et al. (Celebi et al., 2013) 96
Proposed method (Encoded) 86-97
Additionally, the confusion matrices of the En-
coded variant of the approach for 6 and 7 ges-
tures respectively are displayed in Fig 3 and Fig
4. The model exhibits a high degree of accuracy
for gestures, such as a24 sit to stand, a26 lunge, and
a7 basketball shoot, which are likely to have distinct
starting and ending poses or unique motion patterns
that are easily distinguishable. Confusions are primar-
ily seen with a1 swipe left which is sometimes mis-
taken for a8 draw X and vice versa, suggesting that
the horizontal component of the swipe is similar to
part of the ”draw X” motion. Similarly, misclassifi-
cations between a1 swipe left and a9 draw circle cw
imply that certain segments of the swipe and circu-
lar gestures may be indistinguishable to the model.
The model’s difficulty in differentiating between
a1 swipe left and gestures involving complex hand
trajectories (a8 draw X, a9 draw circle cw) indicates
a potential area for improvement. Refinement of the
feature set and the inclusion of more granular tempo-
ral data could enhance the model’s ability to discern
between these gestures with overlapping features.
9.2 Comparative Analysis with
State-of-the-Art Methods
In this section, we juxtapose the performance of
our proposed Encoded configuration against various
state-of-the-art methods, as summarized in the ac-
companying table. The comparative analysis is cru-
cial to positioning our work within the broader land-
scape of action classification methodologies, empha-
sizing its competitive advantages and identifying ar-
eas for further refinement.
Overview of Comparative Performance
1. Classical Methods: These approaches, typically
involving hand-engineered features and classical
machine learning algorithms, show a base ac-
curacy of 60%. Our method significantly sur-
passes this benchmark, demonstrating the efficacy
of modern, data-driven approaches in handling
complex classification tasks.
2. Schneider et al.: With accuracies ranging between
63% to 76%, the work by Schneider et al. closely
aligns with the initial performance metrics our
study aimed to exceed. By achieving accuracy be-
tween 86% to 97% in the Encoded configuration,
our method not only surpasses Schneider et al.’s
performance, but also showcases the potential of
embedding calculators and dimensionality reduc-
tion techniques in enhancing classification accu-
racy.
3. Rwigema et al.: Although Rwigema et al.’s
method achieves an impressive accuracy of
99.4%, it is noted for its unsuitability for real-
time applications due to substantial computational
requirements. This highlights a critical aspect of
our research focus—balancing high accuracy with
computational efficiency to enable real-time clas-
sification.
4. Celebi et al.: The method by Celebi et al.
presents a high accuracy of 96%, situating it
as a leading approach within the field. Our
proposed method’s performance falls within this
high-accuracy bracket while emphasizing real-
time applicability.
9.3 Real-World Deployment
Upon verification, we proceeded to deploy our system
on our UAV platform(Hert et al., 2022)(Hert et al.,
2023) and our UAV control system(Baca et al., 2021),
Intuitive Human-Robot Interface: A 3-Dimensional Action Recognition and UAV Collaboration Framework
33

Figure 3: Confusion Matrix of Encoded Variant with 6 Ges-
ture Classes.
to assess its real-world applicability. The primary fo-
cus of this phase was to determine how well our clas-
sifier could translate laboratory results into practical,
actionable commands in an outdoor environment.
During the trials, the UAV was subjected to a se-
ries of predefined human actions. The 6 gestures that
were used for lab validation (a1, a6, a7, a9, a24, a26),
were performed for testing, with the human standing
between 4-8 meters away from the UAV. The UAV
correctly recognized and responded to 19 out of 20
actions, yielding a real-world accuracy rate of 95%.
Notably, the proposed approach adeptly handled dy-
namic environmental factors, such as changing light
conditions and background noise due to the presence
of clouds, occluding sunlight sporadically throughout
the experiment, showcasing its adaptability and ro-
bustness. Additionally, we encountered no false pos-
itives, which is crucial as the performance of unin-
tended actions is undesirable. The one action that was
not correctly identified was classified as a null action,
leading to no command being sent to the drone. This
is the intended behaviour that we want our approach
to adopt. Missing an action is preferable to misidenti-
fying an action and behaving erratically. Fig 5 shows
a UAV being controlled by a human operator using
gestures.
10 CONCLUSION
In conclusion, the feature space design offers a com-
prehensive approach to extracting rich embeddings
from human pose landmarks. These embeddings,
grounded in both anatomical significance and math-
ematical rigour, are poised to enhance the capabili-
ties of pose-based analysis systems. The comparative
Figure 4: Confusion Matrix of Encoded Variant with 7 Ges-
ture Classes.
Figure 5: A UAV being controlled by a human operator in
an open field.
analysis underscores the Encoded configuration as the
preferred choice for a wide range of applications, par-
ticularly those necessitating real-time processing. It
embodies a practical compromise, delivering high ac-
curacy and F1 scores with considerably lower com-
putational times compared to the Heavy configura-
tion. The comparative analysis also elucidates the po-
sitioning of our proposed method within the action
classification domain. By offering a substantial im-
provement over classical methods and some contem-
porary approaches, as well as by providing a viable al-
ternative to high-accuracy, computationally intensive
methods, our work carves out a niche in the pursuit
of real-time, efficient, and accurate action classifica-
tion. It underscores the importance of methodological
advancements that do not sacrifice practical applica-
bility for theoretical precision, thereby aligning with
the evolving needs of real-world applications. The
proposed method performed exceptionally when de-
ployed on a real UAV, proving its capability in real-
world applications.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
34

ACKNOWLEDGEMENTS
This work has been supported by CTU grant no
SGS23/177/OHK3/3T/13, by the Czech Science
Foundation (GA
ˇ
CR) under research project No. 23-
07517S, and by the Europen Union under the project
Robotics and advanced industrial production (reg.
no. CZ.02.01.01/00/22 008/0004590), by TACR
project no. FW03010020, by the National Council for
Scientific and Technological Development – CNPq,
by the National Fund for Scientific and Technologi-
cal Development – FNDCT, and by the Ministry of
Science, Technology and Innovations – MCTI from
Brazil under research project No. 304551/2023-6 and
407334/2022-0, by the Paraiba State Research Sup-
port Foundation - FAPESQ under research project No.
3030/2021.
REFERENCES
Baca, T., Petrlik, M., Vrba, M., Spurny, V., Penicka, R.,
Hert, D., and Saska, M. (2021). The mrs uav system:
Pushing the frontiers of reproducible research, real-
world deployment, and education with autonomous
unmanned aerial vehicles. Journal of Intelligent &
Robotic Systems, 102:26.
Bazarevsky, V., Grishchenko, I., Raveendran, K., Zhu, T.,
Zhang, F., and Grundmann, M. (2020). Blazepose:
On-device real-time body pose tracking.
Celebi, S., Aydin, A. S., Temiz, T. T., and Arici, T. (2013).
Gesture recognition using skeleton data with weighted
dynamic time warping. volume 1, pages 620–625.
Chaudhary, A., Nascimento, T., and Saska, M. (2022). Con-
trolling a swarm of unmanned aerial vehicles using
full-body k-nearest neighbor based action classifier.
pages 544–551. IEEE.
Chen, C., Jafari, R., and Kehtarnavaz, N. (2015). Utd-mhad:
A multimodal dataset for human action recognition
utilizing a depth camera and a wearable inertial sen-
sor. pages 168–172. IEEE.
Gundogdu, K., Bayrakdar, S., and Yucedag, I. (2018). De-
veloping and modeling of voice control system for
prosthetic robot arm in medical systems. Journal of
King Saud University - Computer and Information
Sciences, 30:198–205.
Hert, D., Baca, T., Petracek, P., Kratky, V., Penicka, R.,
Spurny, V., Petrlik, M., Vrba, M., Zaitlik, D., Stoudek,
P., Walter, V., Stepan, P., Horyna, J., Pritzl, V.,
Sramek, M., Ahmad, A., Silano, G., Licea, D. B.,
Stibinger, P., Nascimento, T., and Saska, M. (2023).
Mrs drone: A modular platform for real-world deploy-
ment of aerial multi-robot systems. Journal of Intelli-
gent & Robotic Systems, 108:64.
Hert, D., Baca, T., Petracek, P., Kratky, V., Spurny, V., Petr-
lik, M., Vrba, M., Zaitlik, D., Stoudek, P., Walter, V.,
Stepan, P., Horyna, J., Pritzl, V., Silano, G., Licea,
D. B., Stibinger, P., Penicka, R., Nascimento, T., and
Saska, M. (2022). Mrs modular uav hardware plat-
forms for supporting research in real-world outdoor
and indoor environments. pages 1264–1273. IEEE.
Jiao, R., Wang, Z., Chu, R., Dong, M., Rong, Y., and Chou,
W. (2020). An intuitive end-to-end human-uav inter-
action system for field exploration. Frontiers in Neu-
rorobotics, 13.
Krusche, S., Al Naser, I., Bdiwi, M., and Ihlenfeldt, S.
(2023). A novel approach for automatic annotation
of human actions in 3d point clouds for flexible col-
laborative tasks with industrial robots. Frontiers in
Robotics and AI, 10.
Mohebbi, A. (2020). Human-robot interaction in rehabili-
tation and assistance: a review. Current Robotics Re-
ports, 1:131–144.
Mokhtarzadeh, A. A. and Yangqing, Z. J. (2018). Human-
robot interaction and self-driving cars safety integra-
tion of dispositif networks. pages 494–499. IEEE.
Park, S., Wang, X., Menassa, C. C., Kamat, V. R., and
Chai, J. Y. (2024). Natural language instructions for
intuitive human interaction with robotic assistants in
field construction work. Automation in Construction,
161:105345.
Rwigema, J., Choi, H. R., and Kim, T. (2019). A differential
evolution approach to optimize weights of dynamic
time warping for multi-sensor based gesture recogni-
tion. Sensors (Switzerland), 19.
Sathiyanarayanan, M., Mulling, T., and Nazir, B. (2015).
Controlling a robot using a wearable device (myo).
Schneider, P., Memmesheimer, R., Kramer, I., and Paulus,
D. (2019). Gesture recognition in rgb videos usinghu-
man body keypoints and dynamic time warping.
Vasconez, J. P., Kantor, G. A., and Cheein, F. A. A. (2019).
Human–robot interaction in agriculture: A survey and
current challenges. Biosystems Engineering, 179:35–
48.
Vysocky, A. and Novak, P. (2016). Human – robot collab-
oration in industry. MM Science Journal, 2016:903–
906.
Yamada, H., Muto, T., and Ohashi, G. (2015). Development
of a telerobotics system for construction robot using
virtual reality. pages 2975–2979. Institute of Electri-
cal and Electronics Engineers Inc.
Yoo, M., Na, Y., Song, H., Kim, G., Yun, J., Kim, S., Moon,
C., and Jo, K. (2022). Motion estimation and hand
gesture recognition-based human–uav interaction ap-
proach in real time. Sensors, 22:2513.
Zhang, J., Yu, Z., Wang, X., Lyu, Y., Mao, S., Periaswamy,
S. C., Patton, J., and Wang, X. (2018). Rfhui: An in-
tuitive and easy-to-operate human-uav interaction sys-
tem for controlling a uav in a 3d space. In Proceedings
of the 15th EAI International Conference on Mobile
and Ubiquitous Systems: Computing, Networking and
Services, MobiQuitous ’18, page 69–76, New York,
NY, USA. Association for Computing Machinery.
Intuitive Human-Robot Interface: A 3-Dimensional Action Recognition and UAV Collaboration Framework
35
