
A Human Pose Estimation Method
from Pseudo-Captured Two-Viewpoints Video
Ayaka Shimazu
1
, Chun Xie
2a
, Satoru Tanigawa
3
and Itaru Kitahara
2b
1
Master’s and Doctoral Program in Intelligent Mechanical Interaction Systems, University of Tsukuba, Ibaraki, Japan
2
Center for Computational Sciences, University of Tsukuba, Ibaraki, Japan
3
Faculty of Health and Sport Sciences, University of Tsukuba, Ibaraki, Japan
Keywords: 3D Human Pose Estimation, Performance Analysis, Pseudo-Binocular Filming, Time-Warping.
Abstract: Motion analysis utilizing human pose estimation has garnered increasing attention within sports science, serv-
ing both preventive medicine and skill enhancement purposes. While techniques using 3D trackers and RGB-
D cameras to estimate human poses are gaining attention, the widespread adoption is hindered by the require-
ment for extensive space and specialized equipment. This paper introduces a novel method to estimate the 3D
human pose using RGB video data captured from 'pseudo' two-viewpoints. This approach involves perform-
ing the same motion in different directions and recording with a single camera. We confirm that the accuracy
of 3D human pose estimation from video taken by a single camera is improved by the pseudo-two-viewpoints
recording compared to existing methods using a single monocular RGB camera.
1 INTRODUCTION
This paper proposes a shooting video method called
"pseudo-two-viewpoints recording" to achieve hu-
man pose estimation with sufficient accuracy for
movement analysis. As illustrated in Figure 1,
Pseudo-two-viewpoints recording involves using a
single RGB camera to record the same movement
performed twice but in different orientations by the
same individual.
In sports science, performance analysis is a crucial
component of preventive medicine and technical im-
provement. Movement analysis is typically based on
human pose estimation, which utilizes videos to ac-
curately capture and analyze athlete movements. This
paper introduces a novel video capturing and pro-
cessing method for human pose estimation and
demonstrate our method using jumping as a specific
example, which is closely tied to lower body perfor-
mance and correlates with the risk of lower body in-
juries (Hewett et al. 2005).
Existing methods for 3D human pose estimation
include marker-based methods (Bodenheimer et al.
1997), RGB-D camera-based methods (Zimmermann
a
https://orcid.org/0000-0003-4936-7404
b
https://orcid.org/0000-0002-5186-789X
et al. 2018), monocular camera image-based methods
(Liu et al. 2020), and multi-viewpoint image-based
methods (Chen et al. 2020). While marker-based and
RGB-D camera-based methods offer high accuracy in
pose estimation, they require extensive space and spe-
cialized equipment, posing challenges for use beyond
professional athletes. Conversely, the field of exer-
cise physiology is increasingly recognizing the im-
portance of preventive medicine for a diverse range
of athletes, including amateur and junior athletes in
addition to professionals.
Using a monocular camera to estimate human
pose information is advantageous for acquiring meas-
urement data easily. However, the accuracy of depth
information derived from single-viewpoint observa-
tions is insufficient, posing challenges for movement
analysis applications. By capturing motion from mul-
tiple viewpoints, we can estimate the 2D coordinates
of the joints at each viewpoint and triangulate the 3D
coordinates from matched joints in different views. In
this way, the ambiguity in depth estimation can be re-
solved, leading to more accurate human pose estima-
tion compared to the monocular video. However, this
approach requires the use of multiple synchronized
148
Shimazu, A., Xie, C., Tanigawa, S. and Kitahara, I.
A Human Pose Estimation Method from Pseudo-Captured Two-Viewpoints Video.
DOI: 10.5220/0012921400003828
In Proceedings of the 12th International Conference on Sport Sciences Research and Technology Support (icSPORTS 2024), pages 148-154
ISBN: 978-989-758-719-1; ISSN: 2184-3201
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
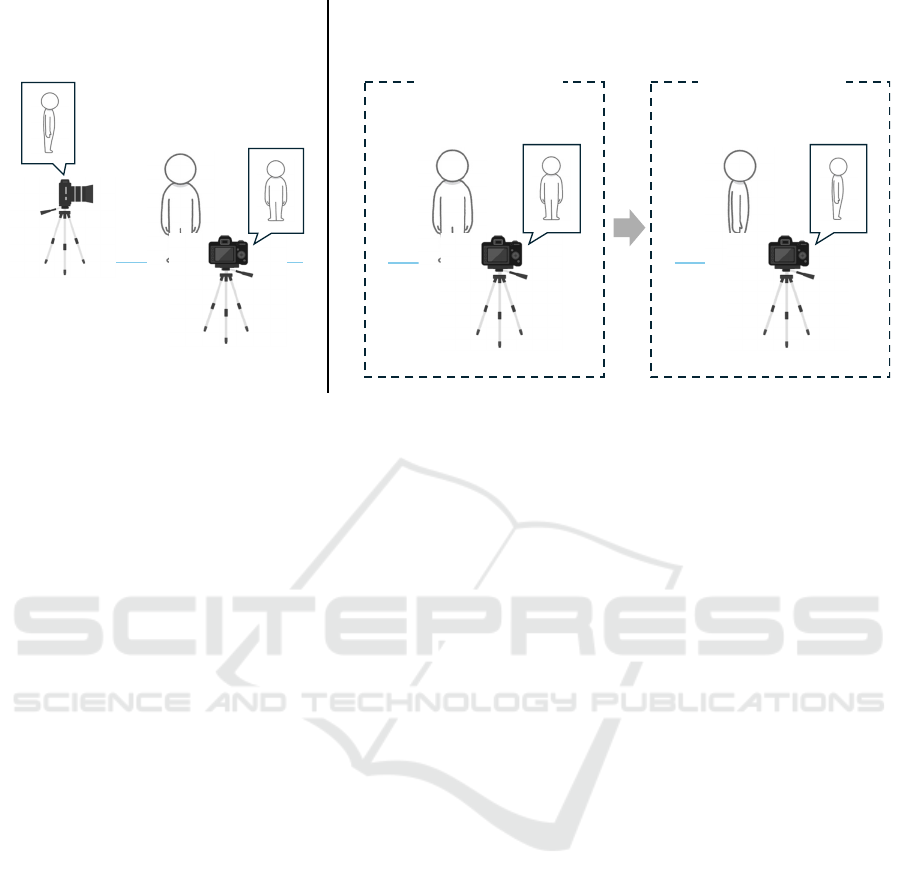
Figure 1: Two-viewpoints recording (left) and pseudo-two-viewpoints recording (right). In two-viewpoints recording, a
frontal image and a side image are captured using two RGB cameras. In pseudo-two-viewpoints recording, the frontal and
side images are obtained by changing the direction of the body and recording twice with a single RGB camera.
RGB cameras, which lead to extra cost and the setup
process can be cumbersome. We therefore propose a
new approach to solve this problem by estimating 3D
human pose information from multi-view (pseudo-
two-viewpoints) video data acquired using only a sin-
gle stationary RGB camera.
The primary challenge in achieving human pose
estimation through pseudo-two-viewpoints recording
lies in temporal and spatial alignment. Temporal de-
viations occur due to varying movement timings,
while spatial deviations arise from changes in camera
and subject orientation. To address these issues, we
introduce a time-warping method to correct temporal
misalignment, along with camera calibration and joint
triangulation, to consistently produce a 3D pose from
two RGB videos. Our method achieves sufficient ac-
curacy for movement analysis without requiring ex-
tensive space or specialized equipment, thus simpli-
fying the process for various athletes.
2 RELATED WORKS
3D human pose estimation can be broadly classified
into marker-based and marker-less methods. Timothy
et al. utilized 25 reflective markers on the lower body
to measure the posture and load on the knee during a
jump landing, recording the 3D coordinates of the
joints (Hewett et al. 2005).
Marker-less posture estimation methods can be
divided into two types: those that estimate joint posi-
tions as 2D coordinates (2D posture estimation) and
those that estimate 3D coordinates (3D posture esti-
mation). An example of a 2D pose estimation method
is HR-Net (Sun et al. 2019). This top-down method
maintains high resolution throughout the process by
adding subnetworks from high resolution to low res-
olution and connecting multi-resolution networks in
parallel, achieving better results than bottom-up
methods for single-person pose estimation. However,
2D pose information alone is insufficient for analyz-
ing sports movements performed in 3D space, neces-
sitating 3D pose estimation.
3D pose information is generally estimated by ap-
plying triangulation based on camera position and
pose information to 2D pose data obtained from im-
ages taken from different viewpoints. This method,
however, requires considerable time and expertise to
set up and synchronize cameras.
GAST-Net (Liu et al. 2020) exemplifies a solution
to this issue. By applying Graph Convolution Net-
works (GCN) to the time series information of the
skeleton, it addresses the self-occlusion problem
where joints are obscured by the subject's own body.
Nevertheless, the accuracy of 3D human pose estima-
tion using a monocular camera remains insufficient
for sports motion analysis when compared to estima-
tion from multiple viewpoints.
In this research, we propose a human pose estima-
tion method that ensure both ease of photography and
accuracy of pose estimation using pseudo multiple
viewpoints captured by a monocular RGB camera.
1st jump 2nd jump
two-viewpoints
video
pseudo-two-viewpoints
video
A Human Pose Estimation Method from Pseudo-Captured Two-Viewpoints Video
149
3 PROPOSED METHOD
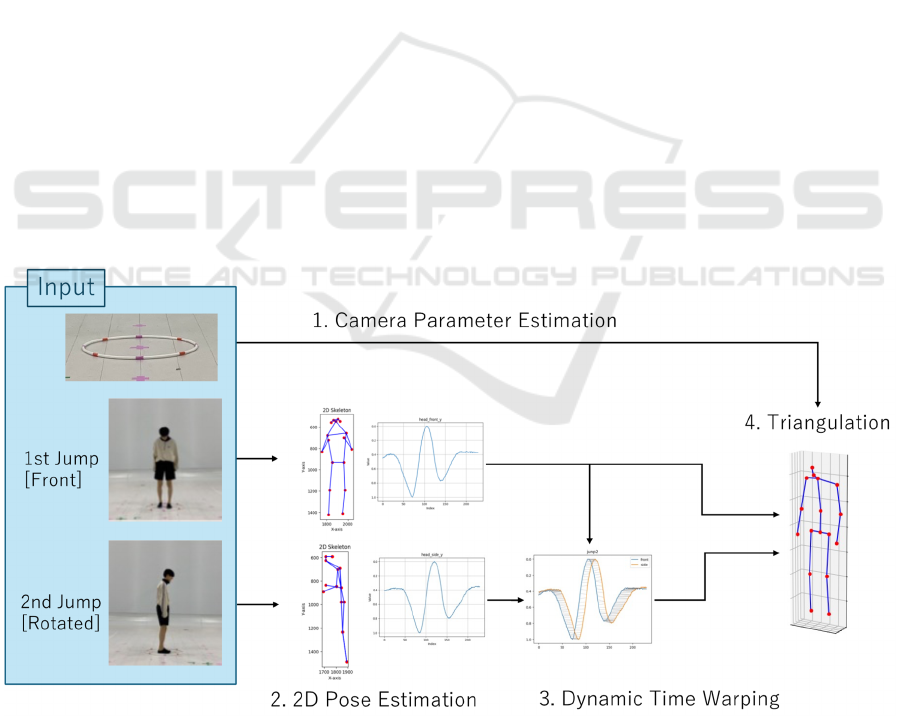
Figure 2 illustrates the processing flow of the pro-
posed method. A single fixed camera is used to cap-
ture images from two different angles (pseudo-two-
viewpoints recording) by changing the subject's body
direction and repeating the same action twice. The
camera position and orientation (extrinsic parame-
ters) are estimated based on landmarks set in the
scene. 2D pose estimation is first performed on the
two captured videos separately. Dynamic Time
Warping (DTW) (Müller 2007) is then applied to the
estimated 2D pose time series information to compen-
sate for the temporal misalignment between the two
series. Finally, the 3D positions of the joints are esti-
mated by triangulating the corresponding 2D joints
using the camera intrinsic and extrinsic parameters
estimated in advance.
3.1 Definition of Coordinate Systems
Figure 3 shows the coordinate system defined this pa-
per. The origin of the world coordinate system 𝑊 is
the center of the hula hoop placed in the scene. The
𝑋-axis is parallel to the horizontal axis of the image
plane of camera 1, and the 𝑌-axis is parallel to the
horizontal component of the optical axis of camera 1.
The 𝑍-axis is obtained by the cross product of the 𝑋
and 𝑌 axes and is orthogonal to the ground on which
the hula hoop is placed. The camera coordinate sys-
tem 𝑐
takes the optical center of camera 1 as the
origin, with the horizontal axis of the image plane as
the 𝑋
-axis (points to the right), the vertical axis as
the 𝑌
-axis (points downward), and the optical axis as
the 𝑍
-axis (points forward). Let (𝑡
,𝑡
,𝑡
) be the
world coordinate of the optical center of camera 1,
and given that 𝑡
is always zero, the rigid body trans-
formation from world frame basis 𝑊 to camera frame
basis 𝑐
in homogenous coordinates is expressed by
Equation (1).
𝒄
=
100 𝑡
00−1𝑡
010−𝑡
000 1
𝑾
(1)
In the pseudo-two-viewpoints recording, the po-
sition and orientation of the virtually positioned cam-
era 2 need to be determined based on the viewport of
camera 1, as it is virtually moved due to the subject's
orientation change. Assuming that the camera 2 is a
rotation of camera 1 by an angle 𝜃 around the 𝑍-axis
of the world coordinate system, the rotation matrix
𝑅
between 𝑐
and 𝑐
are expressed by Equation (2).
𝑹
=
cos𝜃 −sin𝜃 0
sin𝜃 cos𝜃 0
0
0
1
(2)
Figure 2: The 3D human pose is estimated using two videos of jumps in different directions as input. The 3D coordinates of
the joints are estimated by applying joint-based time alignment and joint coordinate triangulation.
icSPORTS 2024 - 12th International Conference on Sport Sciences Research and Technology Support
150
3.2 Spatial Alignment
3.2.1 Camera Position Estimation
The position and orientation (extrinsic parameters) of
camera 1 are obtained using landmarks whose 3D co-
ordinates are known. In this research, a hula hoop
with markings is used as a landmark, as shown in Fig-
ure 4. Using the correspondence information between
the 3D coordinates of the four landmark points and
their 2D coordinates observed in the image, a rotation
matrix 𝑹
and a translation matrix 𝒕
are obtained us-
ing the IPPE method (Collins and Bartoli 2014). The
intrinsic parameters 𝑲 are determined based on
Zhang's method(Zhang 2000). The projective trans-
formation matrix 𝑷
=𝑲(𝑹
|𝒕
) is then obtained by
combining the intrinsic parameters 𝑲 with the extrin-
sic parameters.
3.2.2 Pseudo-Camera Position Estimation
The intrinsic parameters of the second viewpoint
camera are the same as those for the first viewpoint.
From rotation in Equation (2), the perspective projec-
tion matrix of the second viewpoint can be obtained
by Equation (3).
𝑷
=𝑲𝑹
cos𝜃 −sin𝜃 0
sin𝜃 cos𝜃 0
001
𝒕
(3)
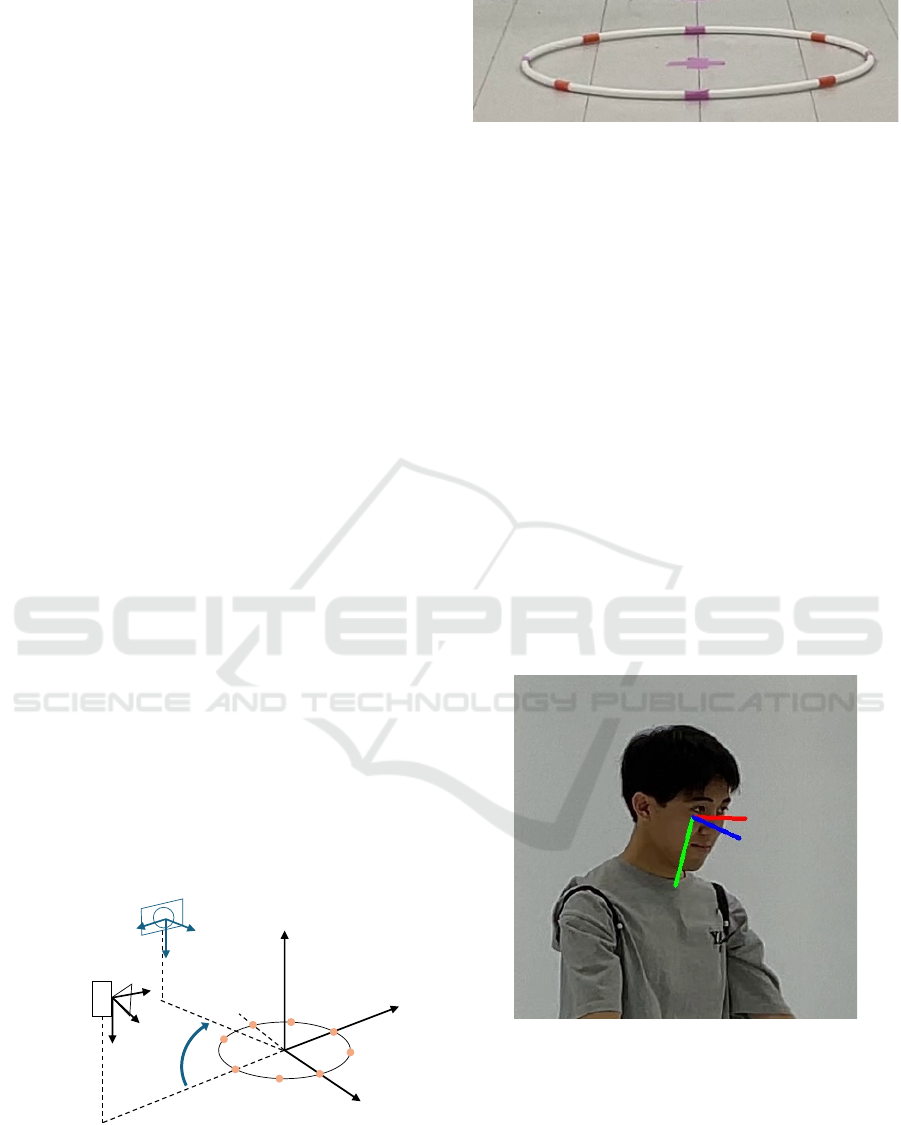
The rotation angle 𝜃 of the camera is considered to
coincide with the rotation angle of the subject's head
around the 𝑍-axis. Therefore, we first estimate the
head posture using 6DRepNet360 (Hempel,
Abdelrahman, and Al-Hamadi 2023) when the sub-
ject is standing upright in both videos (Figure 5), and
estimate 𝜃 as the relative rotation of head around 𝑍-
axis.
Figure 3: World coordinate system and camera coordinate
system.
Figure 4: A hula hoop with target markers.
3.3 Temporal Alignment
The difference in the timing of the start of movement
and the length of the dwell time causes a temporal
posture shift between the videos. Figure 6 illustrates
the processing flow of the temporal alignment. To
correct the temporal misalignment, we focus on the
head movement, which usually has minimum occlu-
sion and allows us to obtain relatively stable coordi-
nates of the joint points. In detail, HR-net (Sun et al.
2019) is applied to the video frames and extract the
vertical coordinates of the subject’s head over time.
Using these coordinates, three key frames in both vid-
eos are detected: the maximum bending point before
the jump, the maximum reaching point, and the max-
imum bending point after the landing. After that,
DTW is applied to match these three key frames and
dynamically adjust the speed of the virtual viewport
video to align it with the actual viewport video. By
doing this, we obtain a pair of time-aligned 2D pose
data for the subject’s jump.
Figure 5: Visualization of head pose estimation results us-
ing 6DRepNet360.
X
Z
O
x
1
z
1
y
1
z
2
x
2
y
2
camera2: virtual camera
camera1: actual camera
hula hoop
θ
Y
A Human Pose Estimation Method from Pseudo-Captured Two-Viewpoints Video
151
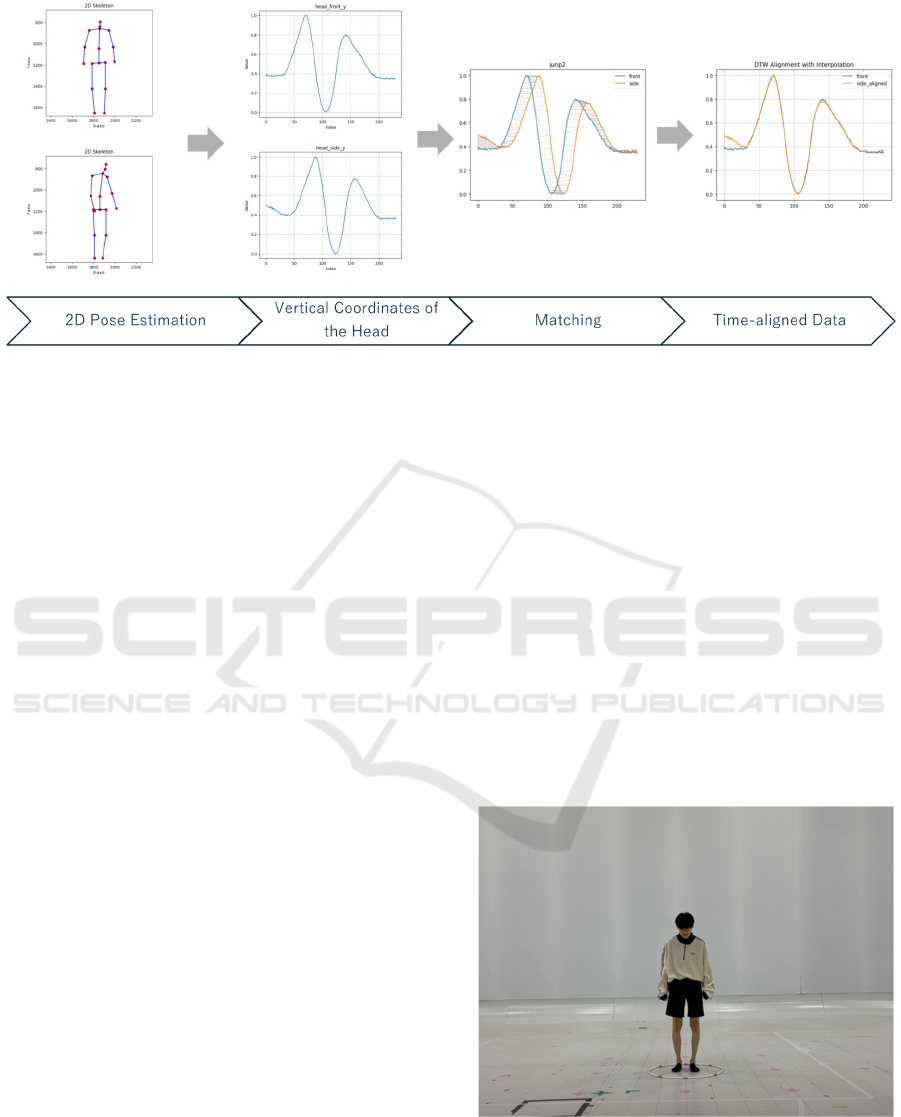
Figure 6: Time alignment using head vertical coordinates: the head vertical coordinates are taken from the 2D pose estimation
results and matched by DTW for temporal alignment.
3.4 Estimation of 3D Coordinates of
Joint Points
The 3D coordinates of the joints are calculated from
the time-corrected 2D skeleton using the method de-
scribed in section 3.2 and the camera parameters ob-
tained in section 3.1. Let 𝑿 be the world coordinate of
the joint point and (𝑢
, 𝑣
) and (𝑢
, 𝑣
) be the coor-
dinates on the images from cameras 1 and 2, respec-
tively. The following equation holds:
⎩
⎪
⎨
⎪
⎧
𝑢
𝑷
𝑿=𝑷
𝑿
𝑣
𝑷
𝑿=𝑷
𝑿
𝑢
𝑷
𝑿=𝑷
𝑿
𝑣
𝑷
𝑿=𝑷
𝑿
(4)
By solving this system of equations, we can ob-
tain the 3D coordinates 𝑿 of the joint points. This
process takes as input the 2D coordinates correspond-
ing to each of the seven joint points in each frame of
the two scenes and the camera parameters obtained in
section 3.1. The output includes 17 joints, and the
skeletal connections between joints are drawn for
each frame to generate the 3D skeletal time series data
of the jumping motion.
4 EXPERIMENTS
4.1 Experimental Setup
In the experiment, a RGB camera mounted on Apple
iPadPro 12.9 (6th generation) is used to capture the
videos. We note that the iPad is frequently used to
record video in sports scenes. The camera is fixed on
a tripod so that the optical center is 1.14 meters above
the ground. The roll and tilt angles of the camera are
set to zero, and the pan angle is adjusted so that the
subject appears at the center of the screen. A white
hula hoop with a diameter of 0.8 meters is used as a
landmark for calibration and as a marker for the jump
position. The motion video is captured with a resolu-
tion of 3840 pixels × 2160 pixels and a frame rate of
60 fps with no zooming (maximum wide angle).
As shown in Figure 7, the participant stands up-
right in the center of the hula hoop and performs a
vertical jump with the camera facing forward. Before
and after each jump, the participants were instructed
to stand still in the upright position for about 3 sec-
onds.
Figure 7: Scene of the shooting experiment. Participants
stand upright in the center of the hula hoop and perform a
vertical jump.
icSPORTS 2024 - 12th International Conference on Sport Sciences Research and Technology Support
152
4.2 Evaluation Metrics
As an index of 3D human pose estimation accuracy,
we use Mean Per Joint Position Error (MPJPE),
which is the average distance between the predicted
and reference positions of a joint point, and P-MPJPE,
which is calculated after a rigid body transformation
of the ground truth (GT) for translation, rotation, and
scale. P-MPJPE is calculated with respect to a coor-
dinate system transformed with the coordinates of the
waist as the origin. The Percentage of Correct 3D
Keypoints (3DPCK) is an index that indicates the per-
centage of successfully detected joints, where the dis-
tance between the predicted position of a joint and the
reference position is within a predefined threshold. In
this experiment, the threshold for 3DPCK is 150 mm,
which is commonly used.
4.3 Results
4.3.1 Quantitative Evaluation
Table 1 shows the estimation accuracy of the 3D
skeleton from the pseudo-two-viewpoints video.
The MPJPE and 3DPCK of the proposed method are
106.5 mm and 86.0%, respectively. The P-MPJPE
of the proposed method is less than half that of the
baseline method. This confirms that the proposed
method improves the accuracy of 3D skeleton esti-
mation. The standard deviation of P-MPJPE has also
decreased, indicating that the proposed method is
stable with less variation in the estimated result.
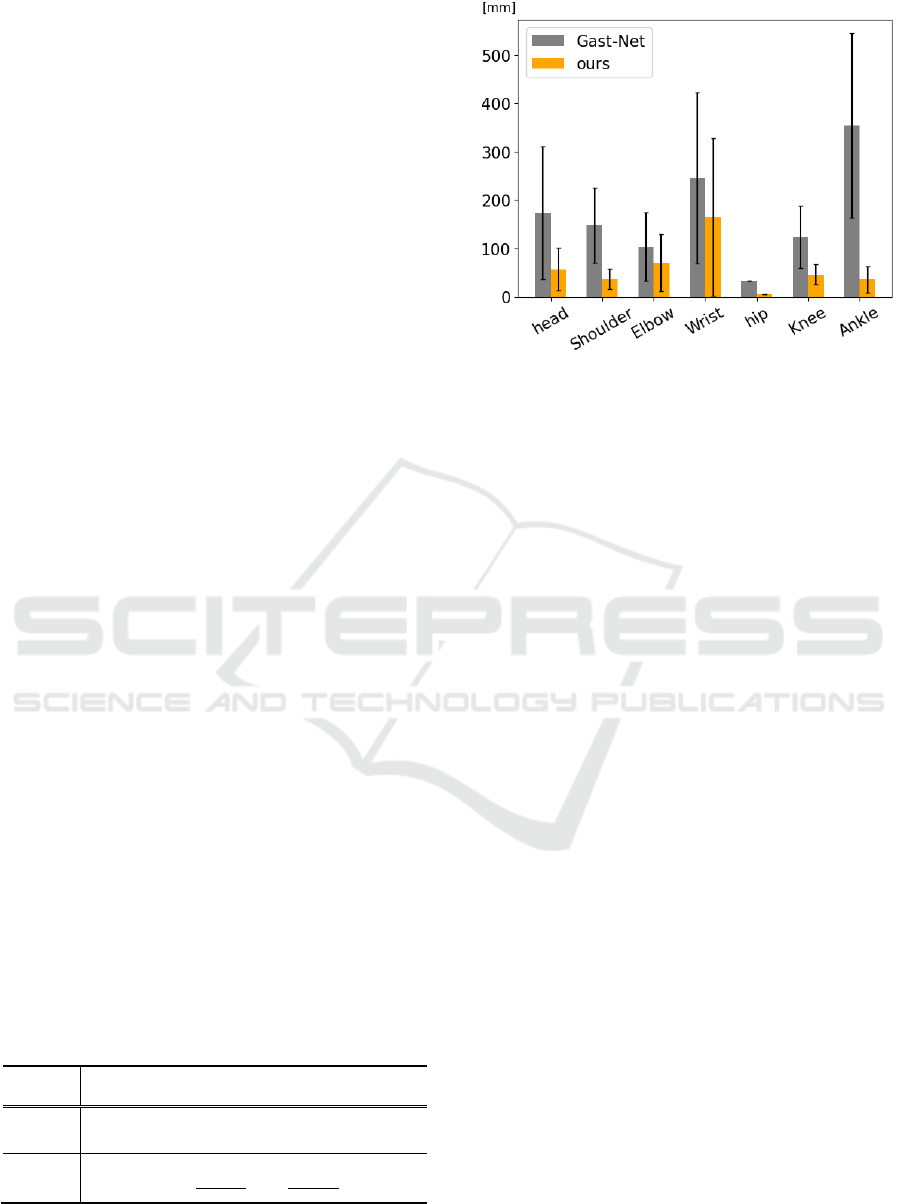
Figure 8 shows the P-MPJPE for each joint. The
MPJPE of the proposed method is smaller for all
joints. The standard deviations are also smaller for
all joints, indicating that the proposed method is sta-
ble. In particular, the MPJPE of the lower body (hips,
knees, and ankles), which is an important index in
jump motion analysis, is kept low, suggesting that
the 3D skeletal posture estimation from the pseudo-
two-viewpoints video is effective for performance
analysis purposes.
Table 1: Accuracy of 3D skeleton estimation. The proposed
method demonstrates greater accuracy compared to the ex-
isting method.
MPJPE
[mm]↓
P-MPJPE
[mm]↓
P-MPJPE
std↓
3DPCK
[%]↑
GAST-
Net
- 163.8 144.2 -
Ours
97.99 53.41 72.52 89.6
Figure 8: Comparison of P-MPJPE for each joint between
the estimation results of the existing method (GAST-Net)
and the proposed method. Error bars indicate standard de-
viations. The proposed method demonstrates greater accu-
racy for all joints.
4.3.2 Qualitative Evaluation
The estimated 3D poses are evaluated qualitatively.
The three estimation results compared are the refer-
ence image estimated by the two-viewpoints record-
ing (ground truth), the image estimated by the pre-
trained GAST-Net, and the image estimated by the
proposed method. The estimation results at two rep-
resentative time points are shown in Figure 9. The re-
sults show that both GAST-Net and our method pro-
duce sufficiently accurate results at the reaching point,
while our method significantly outperformed GAST-
Net for forward-leaning and knee-bending motions,
such as the maximum bending before jumping and
bending after landing.
5 LIMITATIONS
The accuracy of human pose estimation in this system
depends on the similarity between the two repeated
motions. If the similarity between the two motions is
not enough, some errors may occur during time align-
ment and triangulation. Acceptable thresholds for mo-
tion repeatability errors are currently under investiga-
tion and require verification using a larger dataset. Re-
peating the motion multiple times may also reduce re-
producibility due to fatigue or other factors. Moreover,
since this system replaces traditional two-viewpoint re-
cordings with two separate recordings of the same mo-
tion, it requires twice the number of recordings com-
pared to conventional two-viewpoint motion analysis.
A Human Pose Estimation Method from Pseudo-Captured Two-Viewpoints Video
153
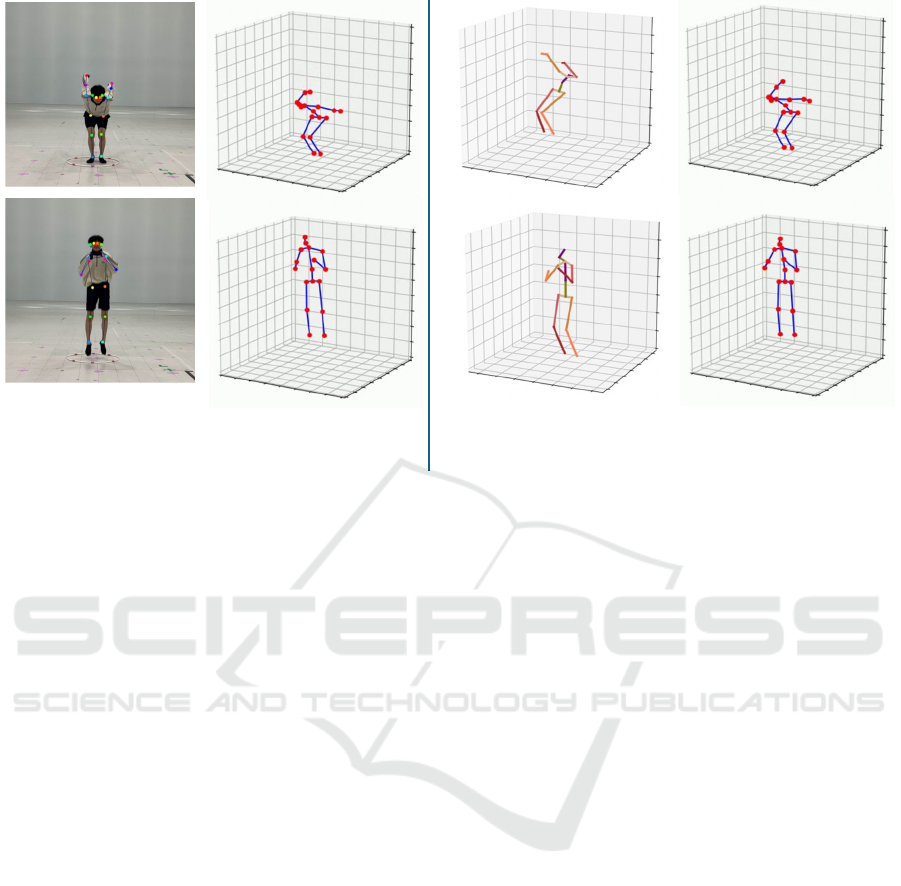
Figure 9: Visualization of 3D human pose estimation results for bending (top) and reaching point (bottom). The accuracy of
GAST-Net is good at the reaching point but significantly decreases during bending motions, while the proposed method
accurately estimates the 3D coordinates of joints in both situations.
6 CONCLUSIONS
This paper proposed a method for estimating the 3D
human pose from pseudo-two-viewpoints video using
only a single monocular RGB camera, to construct a
3D human pose estimation system that could easily
capture images. Spatiotemporal deviations caused by
the use of pseudo-two-viewpoints images were com-
pensated by camera calibration and Dynamic Time
Warping (DTW). Experimental results showed that
the proposed method improves estimation accuracy
compared to existing methods.
REFERENCES
Bodenheimer, Bobby, Chuck Rose, Seth Rosenthal, and John
Pella. 1997. “The Process of Motion Capture: Dealing
with the Data.” In Eurographics, 3–18. Vienna: Springer
Vienna.
Chen, Liangjian, Shih-Yao Lin, Yusheng Xie, Yen-Yu Lin,
and Xiaohui Xie. 2020. “MVHM: A Large-Scale Multi-
View Hand Mesh Benchmark for Accurate 3D Hand
Pose Estimation.” ArXiv [Cs.CV]. arXiv.
http://arxiv.org/abs/2012.03206.
Collins, Toby, and Adrien Bartoli. 2014. “Infinitesimal
Plane-Based Pose Estimation.” International Journal of
Computer Vision 109 (3): 252–86.
Hempel, Thorsten, Ahmed A. Abdelrahman, and Ayoub Al-
Hamadi. 2023. “Towards Robust and Unconstrained Full
Range of Rotation Head Pose Estimation.” ArXiv
[Cs.CV]. arXiv. http://arxiv.org/abs/2309.07654.
Hewett, Timothy E., Gregory D. Myer, Kevin R. Ford,
Robert S. Heidt Jr, Angelo J. Colosimo, Scott G. McLean,
Antonie J. van den Bogert, Mark V. Paterno, and Paul
Succop. 2005. “Biomechanical Measures of
Neuromuscular Control and Valgus Loading of the Knee
Predict Anterior Cruciate Ligament Injury Risk in
Female Athletes: A Prospective Study.” The American
Journal of Sports Medicine 33 (4): 492–501.
Liu, Junfa, Juan Rojas, Zhijun Liang, Yihui Li, and Yisheng
Guan. 2020. “A Graph Attention Spatio-Temporal
Convolutional Network for 3D Human Pose Estimation
in Video.” ArXiv [Cs.CV]. arXiv. http://arxiv.org/
abs/2003.14179.
Müller, Meinard. 2007. “Dynamic Time Warping.” In
Information Retrieval for Music and Motion, 69–84.
Berlin, Heidelberg: Springer Berlin Heidelberg.
Sun, Ke, Bin Xiao, Dong Liu, and Jingdong Wang. 2019.
“Deep High-Resolution Representation Learning for
Human Pose Estimation.” ArXiv [Cs.CV]. arXiv.
http://arxiv.org/abs/1902.09212.
Zhang, Z. 2000. “A Flexible New Technique for Camera
Calibration.” IEEE Transactions on Pattern Analysis and
Machine Intelligence 22 (11): 1330–34.
Zimmermann, Christian, Tim Welschehold, Christian
Dornhege, Wolfram Burgard, and Thomas Brox. 2018.
“3D Human Pose Estimation in RGBD Images for
Robotic Task Learning.” ArXiv [Cs.CV]. arXiv.
http://arxiv.org/abs/1803.02622.
Two-
viewpoint
GAST-Net
pseudo-two
viewpoints
(ours)
2D
key point
icSPORTS 2024 - 12th International Conference on Sport Sciences Research and Technology Support
154
