
Enhancing Intelligent Vehicle Lane-Change Strategies Based on
Deep Reinforcement Learning
Ruihui Li
a
Jinan University-University of Birmingham Joint Institute, Jinan University, Guangzhou, China
Keywords: Lane-Change Strategies, Deep Reinforcement Learning, Driving Safety.
Abstract: The evolution of intelligent vehicle lane-change strategies, propelled by advancements in automated driving
technology, underscores the significance of efficient road utilization, traffic congestion reduction, and driving
safety. This paper investigates the impact of varying penalty values for unnecessary lane changes at different
speed limits on lane-change decisions, aiming to ascertain effective strategies. Employing deep reinforcement
learning, this study simulates and analyses vehicle lane-change behaviours. Initially, a simulated traffic
environment is constructed, and a reward system is defined to reflect different speed limits and unnecessary
lane-change penalties. Utilizing the deep deterministic policy gradient (DDPG) algorithm, vehicles are trained
to optimize lane-change strategies across diverse scenarios. Evaluation based on average rewards
demonstrates that increasing the penalty for unnecessary lane changes enhances vehicle speed and facilitates
safer time headway maintenance at both low and high-speed limits. Experimental findings indicate that
adjusting the penalty effectively guides vehicles towards cautious lane-change decisions, thereby enhancing
driving efficiency and safety. This discovery presents a novel adjustment mechanism for autonomous driving
system decision algorithms and offers insights for the development of more intelligent traffic management
systems, promoting enhanced road utilization alongside driving safety.
1 INTRODUCTION
Vehicle lane change constitutes an essential vehicular
maneuver involving multiple vehicles in two lanes. It
is performed dynamically, necessitating interaction
with a plurality of proximate vehicles (Winsum,
1999). There is a high degree of randomness and
uncertainty in vehicle lane changes. Recent studies
have revealed that approximately three-quarters of
vehicular accidents are attributable to driver
misjudgments during lane-change processes,
highlighting the critical role of lane-change decisions
in the field of traffic safety. Appropriate decisions
regarding lane changes can markedly diminish
disturbances to adjacent vehicular traffic and enhance
the overall safety of the traffic system. On the
contrary, suboptimal lane-change decisions may
result in significant perturbations to vehicular flow,
precipitate traffic congestion, and potentially initiate
accidents (Ma, 2023). Hence, in-depth research on
lane changes is of vital crucial for promoting the
widespread application of intelligent driving
a
https://orcid.org/0009-0006-4913-3439
technologies and safeguarding both human lives and
assets. Intelligent driving systems must be capable of
making various decisions when faced with required
lane changes or interactive lane- change behaviors
(Sun, 2021).
Currently, the model of vehicle lane change
problems can be divided into three main categories.
The first category is rule-based models. For instance,
the Gipps model (Gipps P.D. ,1986) is the earliest
proposed lane-change model, serving as the
foundation for various microscopic traffic simulation
software programs. Highly dependent on rules
specified by domain experts, rule-based approaches
offer quick decisions and high interpretability but
lack the ability to adapt to new data and generalize
well. The second category is data-based algorithms.
Data-based models such as machine learning
algorithms and integrated learning algorithms
(Khelfa, 2023) predict lane-change behaviors using
large data sets to train classification algorithms,
offering relatively better performance than rule-based
models. However, financial investments for data are
200
Li, R.
Enhancing Intelligent Vehicle Lane-Change Strategies Based on Deep Reinforcement Learning.
DOI: 10.5220/0012923000004508
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Engineering Management, Information Technology and Intelligence (EMITI 2024), pages 200-207
ISBN: 978-989-758-713-9
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
required and legal frameworks need to be considered
in data-based models (Zhang, 2022). As the third
category, Deep Reinforcement Learning (DRL)
models can continuously learn and improve when
interacting with the environment, which is more
generalizable than the rule-based model and can
avoid the need for large datasets effectively.
Combining DRL with vehicle networking technology
for urban road traffic control is a current research
hotspot and frontier field (Sutton, 2018). At present,
there are few studies on the interactions between
multiple autonomous vehicles and cooperative lane
change, while previous studies have rarely considered
the different performances of vehicles at different
speed limits.
The primary aim of this study is to delve into the
cooperative lane-change decisions of multiple
autonomous vehicles. Firstly, employing the deep
deterministic policy gradient (DDPG) framework,
this study tackles the multi-autonomous vehicles’
highway lane-change challenge amidst mixed traffic
scenarios. Here, vehicles collaborate to learn safe and
efficient driving strategies, leveraging averaged
output performance. Secondly, to ensure optimal
vehicle operations, the paper imposes penalties for
unnecessary lane changes while incentivizing
effective lane changes. This addresses the issue of
vehicles excessively or insufficiently changing lanes
to maximize reward values. Thirdly, this study
analyzes and compare the predictive performance of
models under different lane change reward schemes.
Moreover, this study incorporates various speed
limits commonly observed on highways (40, 60, 80
meters per second), adjusting safety distances
between cars accordingly. This resolves the limitation
of employing a uniform speed limit for all vehicles.
Additionally, in crafting the reward function, this
study considers sudden accelerations or decelerations
of vehicles, thereby mitigating the tendency to
prioritize driving efficiency over passenger comfort,
a common oversight in previous studies.
2 METHODOLOGIES
2.1 Dataset Description and
Preprocessing
In order to simulate driving scenarios, the highway-
env platform is used in this study (Leurent, 2018).
Highway-env is an open-source simulation
environment for developing and testing autonomous
driving strategies. Created by Edouard Leurent, the
environment provides a series of customizable, rule-
based traffic scenarios for evaluating the decision-
making and control systems of self-driving vehicles.
In highway-env, there are six specialized driving
scenarios to choose from, which are highway, merge,
roundabout, parking, intersection and racetrack. This
study considers a three-lane, one-way highway, with
a vehicle density of 8 autonomous vehicles and 10
manually driven vehicles kept constant.
2.2 Proposed Approach
The objective of this research is to investigate the
lane-change performance of autonomous vehicles
when different levels of penalties are imposed for
unnecessary lane changing at different speed limits
respectively, in order to find effective lane- change
strategies. The approach is based on the DDPG, a
DRL algorithm, combined with a highway simulation
environment.
To enhance lane-change effectiveness, a penalty
for unnecessary lane-change distance is introduced.
Meanwhile, the acceleration during lane changes and
the range of the distance between vehicles after lane
changes are limited, which ensures that lane changes
provide a higher level of comfort and has minimal
impact on neighbouring vehicles. This paper
evaluated the average lane-change performance of
multi vehicles in different kind of traffic scenarios by
varying speed limit and penalty for unnecessary lane
change , controlling the density of vehicles
unchanged. The controlled autonomous vehicles (the
agents) interact with the simulated traffic
environment and utilizes the return from the
environment to develop a lane-change strategy.
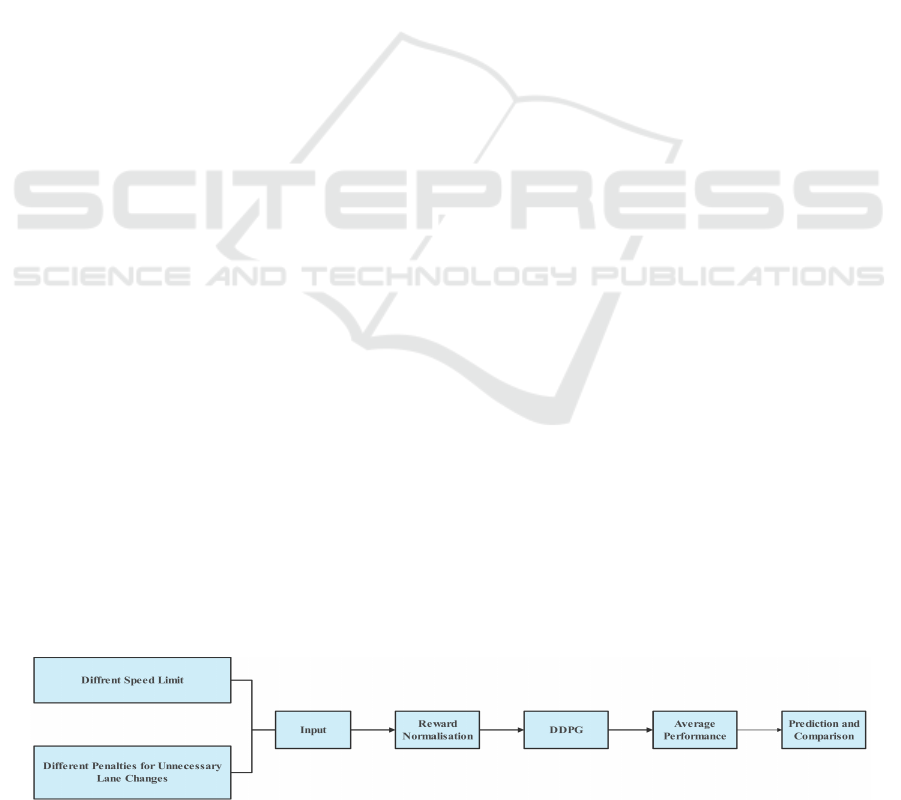
Figure 1 below illustrates the structure of the system.
Figure 1: The pipeline of the model (Photo/Picture credit: Original).
Enhancing Intelligent Vehicle Lane-Change Strategies Based on Deep Reinforcement Learning
201
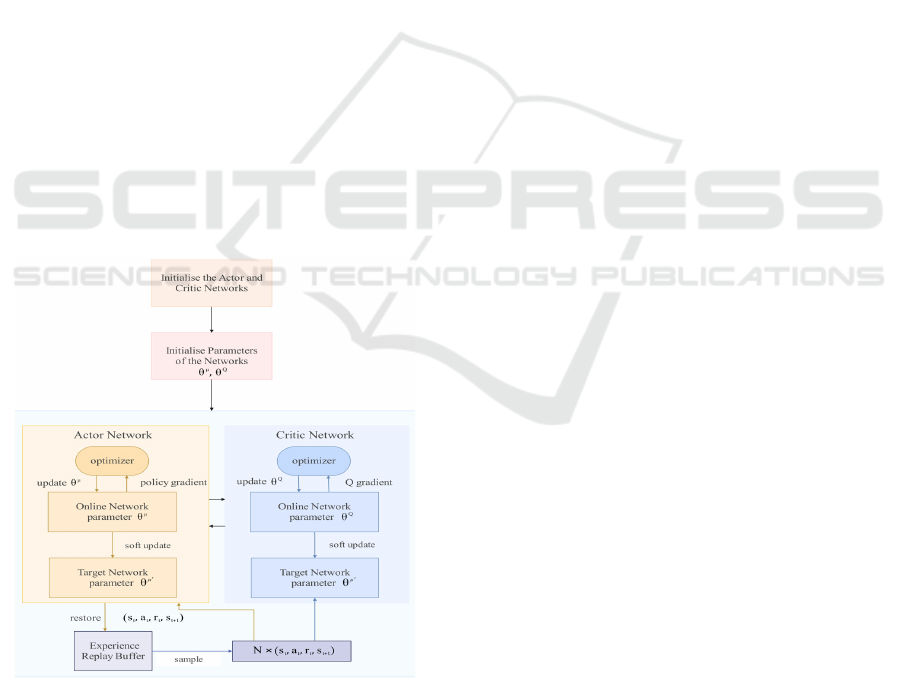
2.2.1 DDPG
The optimal lane change policy for this model is
achieved by the DDPG algorithm, a DRL algorithm
based on the Deterministic Policy Gradient theorem
(DPG). It introduces the Actor-Critic algorithm,
which has two neural networks. The actor network is
used to represent the policy P(a│s) by DPG. The
critic network Q(s, a; w) evaluates the long-term
payoff of taking a particular action (Ye, 2019).
Borrowing the target network in Deep Q-Network
(DQN), the DDPG algorithm uses a dual neural
network architecture (Online network and Target
network) for both the policy function and the value
function, resulting a more stable learning process and
faster convergence. Furthermore, the algorithm
introduces a Replay Buffer borrowed from DQN to
eliminate the correlation and dependence between
samples and facilitates algorithm convergence. Ideal
for continuous action spaces, DDPG outputs specific
actions for a state. The process of DDPG begins with
initializing actor and critic networks, then iteratively
sampling and executing actions, observing results,
storing observations, updating the policy gradient,
amending critic network based on target network and
rewards, and updating target network parameters,
aiding DDPG to gradually learn how to take optimal
actions in the continuous action space. Figure 2 below
shows the process of DDPG.
Figure 2: The process of DDPG (Photo/Picture credit:
Original).
2.2.2 Transformer Encoder
In reinforcement learning, it is crucial to define the
observation space, action space, and reward variables
after specifying the task that the agent need to
accomplish.
1. Observation space: The study sets 8 agents. For
each agent, 6 variables are defined here. It contains
lateral position, longitudinal position, lateral velocity,
longitudinal velocity and the orientation.
2. Action space: For each agent, the study defines
the range of acceleration, steering values, speed and
time headway which are continuous, enabling the
throttle control and cornering control.
3. Reward variables: To ameliorate the training
difficulty and augment the efficacy of the model, the
behavior of each agent is evaluated separately in this
paper. This ensures that rewards are not uniformly
applied to all agents.
Based on the above considerations above, this
paper proposes the reward function R using the linear
combination approach as follows:
1234
Rrr r r=+++
(1)
and calculates the average reward of 8 controlled
autonomous vehicles.
Metrics such as safety, traffic, efficiency, and
passenger comfort are considered in the design of the
reward function.
1) Safety evaluation 𝑟
: The controlled
autonomous vehicles should operate without collision
and without deviating from the road. Thus, this study
establishes penalty for collisions and reward for
vehicles that stay on the road. The safety evaluation
is obtained by linearly summing the two values.
If the vehicle collides with another vehicle, agent
will be penalised by 𝑟
.
For the vehicle that does not deviate from the
highway, agent will be rewarded by 𝑟
.
2) Time Headway evaluation 𝑟
: Vehicles should
keep a safe distance from the vehicle ahead to avoid
collision during travelling. This study establishes
reward for time headways promoting the efficient
operation of roads and penalty for unsafe time
headways. The time headway evaluation is obtained
by linearly summing the two values.
For different speed limits, this paper sets different
ranges of time headway to get reward. If the speed
limit is 40, the range of distances awarded is 30 to 35;
if the speed limit is 60, the range of distances awarded
is 60 to 65; and if the speed limit is 80, the range of
distances awarded is 80 to 85. The agent within the
specified time headway range is rewarded with 𝑟
.
EMITI 2024 - International Conference on Engineering Management, Information Technology and Intelligence
202

According to this paper, distances are deemed
unsafe when they are less than the maximum speed
limit minus 10. It is specified that when the time
headway from the previous vehicle is unsafe, the
agent is penalised with 𝑟
.
3) Speed evaluates 𝑟
: Vehicles are expected to
travel at a high-speed level while ensuring safety.
This paper stipulates that when a vehicle is
travelling at a speed between the maximum speed
limit minus 5 and the maximum speed limit, the agent
is rewarded with 𝑟
.
4) Lane change evaluation 𝑟
: In this study, the
initial roads of all 8 controlled autonomous vehicles
are set as the leftmost lane. The effectiveness, safety,
and comfort of lane change are considered, added
linearly as the lane change evaluation.
For the effectiveness of lane change, considering
the limited visibility of the self-driving vehicle (Li,
2022), this study defines that a lane-change action is
not necessary if the time headway of the controlled
autonomous vehicle is greater than 85m. The penalty
of the unnecessary lane change and the reward of the
effective lane change are defined by 𝑟
, i.e.:
41
,
0.2
p unecessary lane changes
r
other lane changes
=
(2)
where p is the penalty value for unnecessary lane
change. This paper will study the lane change
strategies and compare the performance of controlled
autonomous vehicles when
𝑝 = −0.2, −0.35, −0.5,
respectively.
For the comfort of lane change, it is reflected by
the acceleration of the vehicles at the moment of lane
change in this study, i.e.
42
0.1 [ 5,5],
0.1
t
if a
r
other lane changes
∈−
=
−
(3)
where 𝑎
denotes the acceleration of controlled
autonomous vehicles during the lane change at time 𝑡.
For the safety of lane change, this paper evaluates
the impact of lane change on the surrounding vehicles
by observing the closest distance between the lane-
change vehicle and the vehicles behind it on this road
at the moment when finishing the lane change, i.e.
43
1tan,
0.2
if the dis ce is unsafe
r
other lane changes
−
=
(4)
In addition, to avoid controlled autonomous
vehicles changing lanes frequently, operating on the
rightmost lane is penalised with 𝑟
.
4. Reward values. The Table 1 below displays
reward values that are not previously mentioned.
Table 1: Reward values that are not previously mentioned.
Reward Item Reward value
𝑟
-1.5
𝑟
1.8
𝑟
0.4
𝑟
-1.2
𝑟
0.5
𝑟
-0.001
2.2.3 Loss Function
In the DDPG algorithm, there are two loss functions
for training critic and actor networks. Mean Squared
Error (MSE) is adopted for Critic Loss, and the
expression is as follows:
2
1
() ( (,| ))
QQ
iii
i
LyQsa
N
θθ
=−
(5)
where 𝑄
𝑠, 𝑎
|
θ
is the function evaluation of the
critic network for the output action of the actor
network, θ
denotes a parameter of the critic network,
𝑦
denotes the target value, calculated as 𝑦
= 𝑟
+
γ𝑄
𝑠
, μ
𝑠
θ
θ
and 𝑁 denotes the
number of samples. This loss function encourages the
critic network's output to be as close to the true return
value as possible.
The Actor Loss is:
1
() (,(| )| )
Q
ii
i
LQss
N
μμ
θ
μ
θθ
=−
(6)
where μ
𝑠
|
θ
denotes the action output by the Actor
network, 𝜃
denotes the parameter of the actor
network. This loss function encourages the actor
network to adjust its policy by expanding the
expected return of the selected action. The negative
sign is used to indicate gradient ascent.
In DDPG algorithm, these two loss functions are
interleaved: first the critic network is updated by
critic's loss function, and then the actor network is
updated by the output of the Critic network.
3 RESULTS AND DISCUSSION
3.1 Comparison of Average Rewards
Figures 3(a), (b) and (c) below show the average
rewards of 8 controlled autonomous vehicles when
different penalty values p are set for unnecessary lane
change of the vehicles under the speed limits of 40,
Enhancing Intelligent Vehicle Lane-Change Strategies Based on Deep Reinforcement Learning
203
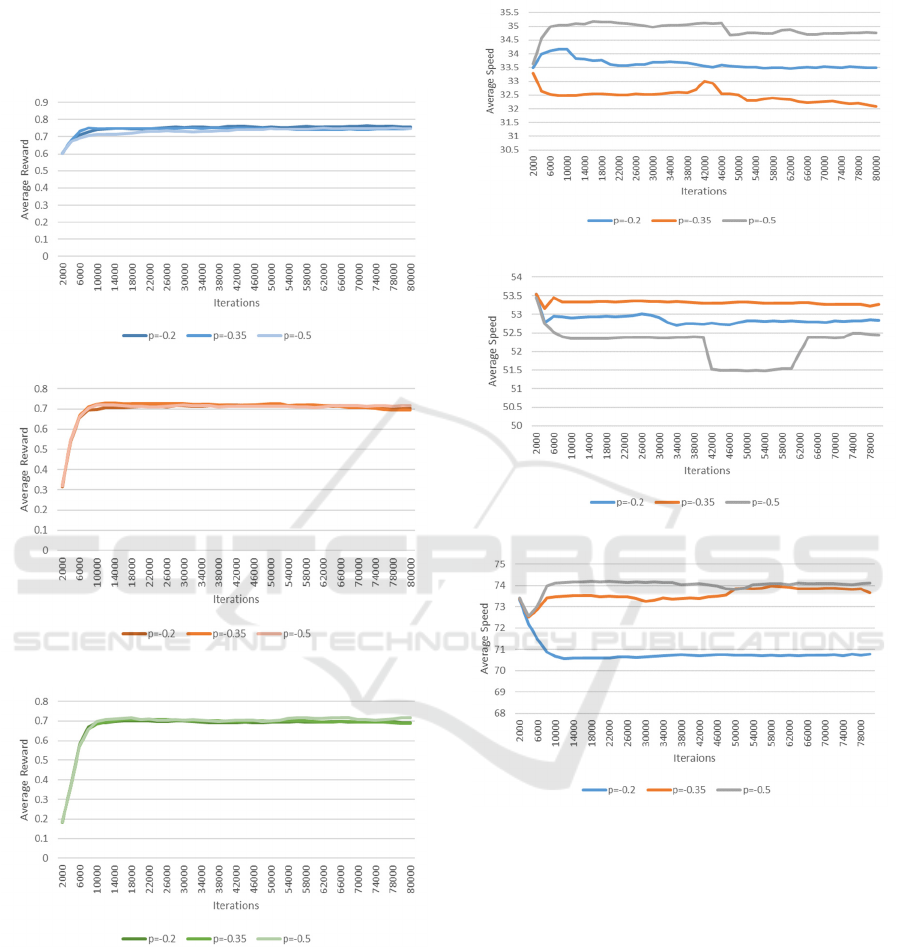
60 and 80, respectively. As can be seen from the
figure, the curves all stabilize after more than about
10,000 iterations, and the average reward value
reaches about 0.7, indicating that the learning process
starts to converge and the algorithm is close to the
optimal strategy.
(a) 40m/s
(b) 60m/s
(c) 80m/s
Figure 3: The average rewards of different
𝑝
(Photo/Picture
credit: Original).
3.2 Comparison of Average Speeds
Figures 4(a), 4(b) and 4(c) below represent the
average speeds of 8 controlled autonomous vehicles
when different penalty values p are set for
unnecessary lane change at speed limits of 40, 60 and
80 respectively.
(a) 40m/s
(b) 60m/s
(c) 80m/s
Figure 4: The average speeds of different
𝑝
(Photo/Picture
credit: Original).
The Figures demonstrate that setting different penalty
values for lane-change behaviors can impact the
behavioral pattern of the vehicles and, consequently,
the overall average speed. Meanwhile, the impact of
varying penalty values on the speed of the vehicles
differs at different speed limits. Figures 4(a) and 4(c)
demonstrate that the group with the highest penalty
values has the highest average speed at speed limits
of 40 and 80. Conversely, Figure 4(b) shows that the
group with the highest penalty values has the lowest
average speed at a speed limit of 60. This suggests
that unnecessary lane changing in low and high-speed
EMITI 2024 - International Conference on Engineering Management, Information Technology and Intelligence
204
situations may lead to increased instability in the
traffic flow, making it more chaotic and thus affecting
the speed of vehicles. Simultaneously, if the penalty
for changing lanes is excessively high in medium-
speed scenarios, drivers may become overly cautious
when changing lanes. This over-restriction can result
in over-congestion in some lanes while others remain
relatively free, leading to an irrational allocation of
lane resources.
3.3 Analysis of Time Headway
Performance of 8 Autonomous
Vehicles
By calculating the average time headway of 8
autonomous vehicles, this paper concludes that the
maximum numbers of vehicles with safe time
headway are achieved when 𝑝 = −0.35 for a speed
limit of 40 m/s, 𝑝 = −0.35 for a speed limit of 60
m/s, and 𝑝 = −0.5 for a speed limit of 80 m/s.
This suggests that as speed limits increase, higher
penalties for unnecessary lane change are more
effective in maintaining safe distances between
vehicles and preventing vehicles from increasing
their speed by changing lanes without regard for
safety. To ensure safe driving, the data with the
highest number of vehicles with safe time headway
among 8 vehicles at different speed limits is selected
for analysis.
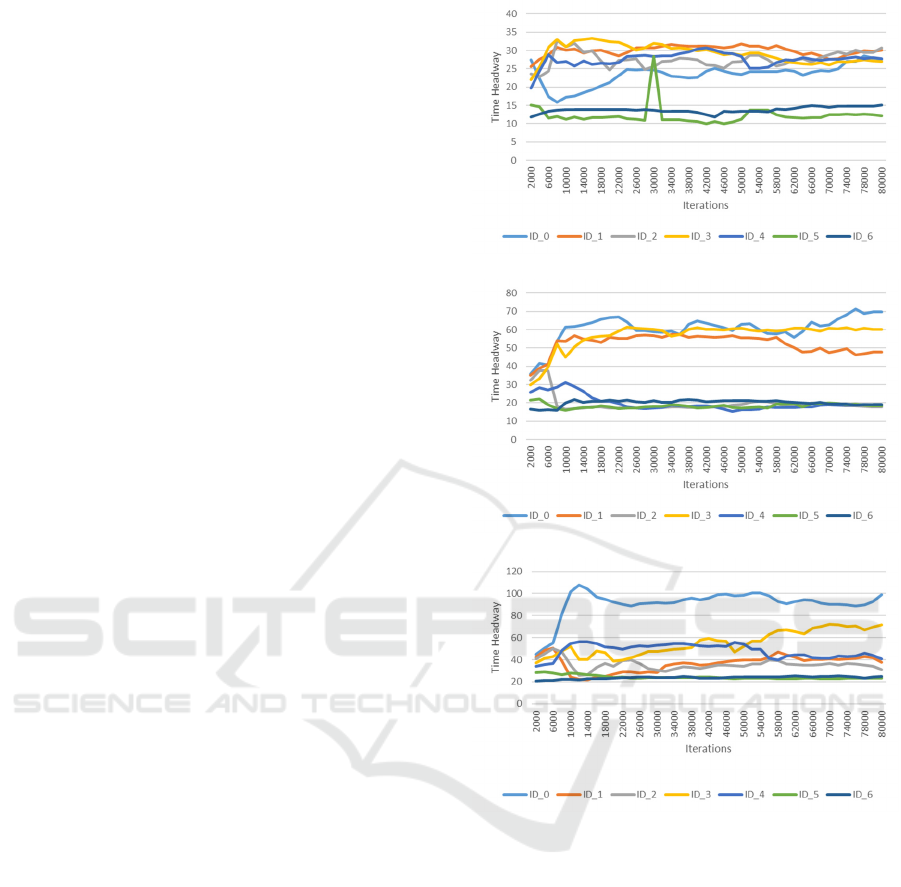
As shown in Figure 5, under three different speed
limits, the vehicle with ID 8 remains at the front of
the road, resulting in no other vehicles overtaking it
and therefore no time headway. The remaining 7
vehicles are shown in the figure, with vehicles ID 0
and 3 maintaining a safe time headway under all three
speed limits, while vehicles ID 5 and 6 do not
maintain a safe time headway. The study finds that 50%
of vehicles travelling under a speed limit of 40 and
50% of cars travelling under a speed limit of 60 can
maintain a safe time headway. However, only 27.5%
of vehicles are able to maintain a safe time headway
at a speed limit of 80. These results suggest that the
model is more suitable for low and medium speed
situations, and that its performance decreases as the
speed limit increases.
To investigate the reasons for the varying
performance of the time headway of the eight
vehicles, this paper considers three factors: average
speed, percentage of no vehicles ahead, and frequent
lane changes of the eight vehicles at different speed
limits. The Table 2 below displays the average speed
and percentage of no vehicles ahead of the eight
(a) 40m/s
(b) 60m/s
(c) 80m/s
Figure 5: The time headways of eight autonomous vehicles
(Photo/Picture credit: Original).
vehicles in the last 10,000 iterations, and Figure 6
illustrates the number of lane-change time points at
different speed limits. The results indicate that
vehicles with IDs 5 and 6 experience a higher
percentage of no vehicles ahead. To avoid penalties
due to small time headway, these two vehicles are
kept at the front of their respective roads by making a
relatively high number of lane changes compared to
all the vehicles at speed limits 40 and 80. Additionally,
these two vehicles are kept at the front of their
respective roads by maintaining a higher speed at
speed limit 60, resulting in a high-speed reward. As
the speed limit increases, the number of vehicles
maintaining an average speed in the high-speed range
increases, and the number of lane changes gradually
Enhancing Intelligent Vehicle Lane-Change Strategies Based on Deep Reinforcement Learning
205
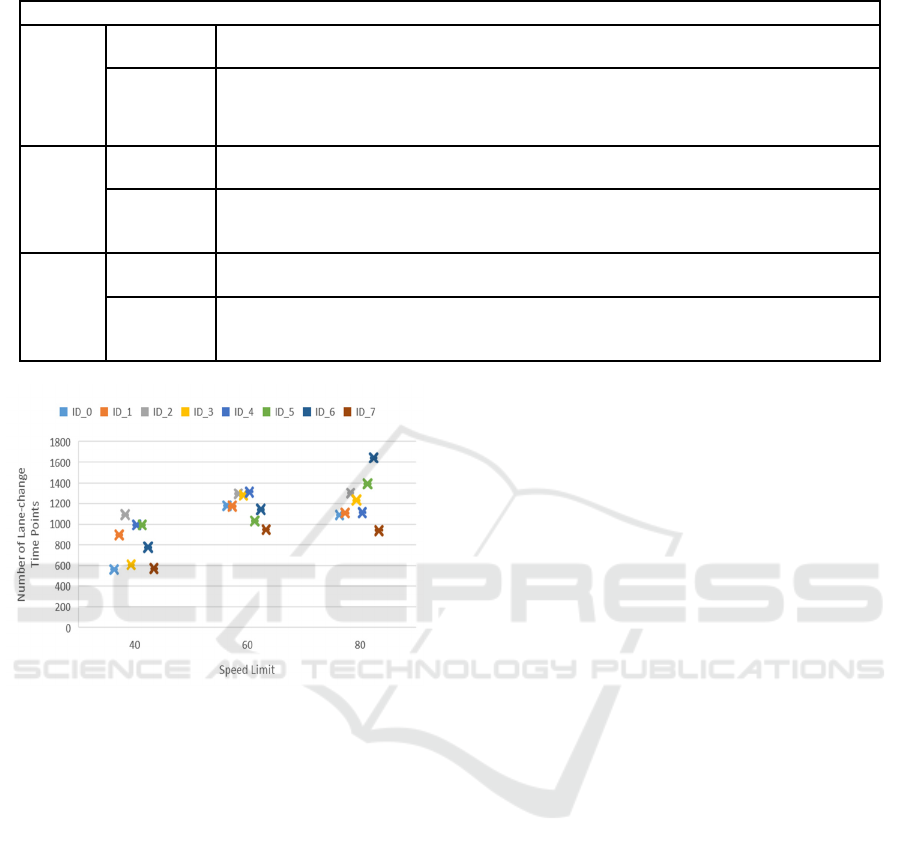
Table 2: Performance of eight autonomous vehicles in the last 10,000 iterations.
ID_0 ID_1 ID_2 ID_3 ID_4 ID_5 ID_6 ID_7
Speed
Limit=40
Average
S
p
ee
d
31.42 37.18 30.83 31.09 31.63 34.61 30.85 29.67
Percentage of
no vehicles
ahead
6.78% 0.30% 2.15% 11.04% 12.67% 15.03% 46.74% 100.00%
Speed
Limit=60
Average
S
p
ee
d
51.19 50.98 50.97 50.97 57.40 57.37 57.27 49.92
Percentage of
no vehicles
ahea
d
0.37% 1.83% 0.00% 12.58% 27.48% 17.49% 89.68% 100.00%
Speed
Limit=80
Average
S
p
ee
d
77.42 77.61 77.61 70.84 77.36 70.84 70.84 70.09
Percentage of
no vehicles
ahea
d
0.26% 0.58% 1.29% 1.99% 26.63% 27.24% 85.72% 100.00%
Figure 6: The number of lane-change time points of eight
vehicles (Photo/Picture credit: Original).
rises. Meanwhile, the number of vehicles able to
maintain a safe time headway decreases. This
suggests that the way in which vehicles are rewarded
may gradually shift from a reduction in penalties for
not maintaining a safe time headway to rewards for
high speeds and lane changes as the speed limit
increases.
3.4 Model Improvement Options
To improve the model for the problem where the
vehicle is rewarded by increasing its speed and lane
changing frequency when maintaining small time
headway, the following steps can be taken:
1. Create a safety envelope centred around the
vehicle that represents the minimum safe time
headway that needs to be maintained at any speed. If
a vehicle exceeds this domain, it should be penalised
accordingly (Erlien, 2015).
2. By combining an advanced prediction
algorithm with an adaptive control strategy to help
vehicle intelligently sense changes in the speed of the
vehicle in front of it and promptly adjusts its own
speed and lane-changing manoeuvres, ensuring that
smooth traffic conditions are maintained without
sacrificing safety.
3. The Multi-Agent Deep Deterministic Policy
Gradient algorithm (MADDPG) can be applied to
enhance the synergy between intelligences.
In summary, varying penalty values for lane-
change behaviour impacts the behavioural pattern of
the vehicles. Larger penalties for unnecessary lane-
change result in higher average speeds at both low
and high-speed limits and are more effective in
maintaining safe time headway between vehicles at
high-speed limit. As the speed limit increases,
vehicles may gradually shift from a reduction in
penalties for not maintaining a safe time headway to
rewards for high speeds and lane changes.
4 CONCLUSIONS
This study investigates the cooperative lane change
decisions made by multiple autonomous vehicles.
Utilizing the DDPG algorithm, it examines how
autonomous vehicles perform lane changes under
different speed limits while imposing varied penalties
for unnecessary lane changes. The methodology
involves penalizing such changes, rewarding
effective ones, averaging out rewards among multiple
agents, and analyzing behaviors across diverse speed
limit scenarios. Through extensive experiments, the
proposed method is thoroughly evaluated. Results
indicate that heavier penalties result in higher average
EMITI 2024 - International Conference on Engineering Management, Information Technology and Intelligence
206

speeds across varying speed limits, while also
ensuring safe distances between vehicles, especially
at higher speeds. These findings suggest a shift in
behavioral patterns, emphasizing rewards for high
speeds and lane changes rather than penalties for not
maintaining safe distances. Moving forward, the
research will focus on establishing a safety envelope
centered around the vehicle, with attention to
determining suitable values and flexibility for this
safety measure.
REFERENCES
Erlien, S. M., Fujita, S., & Gerdes, J. C. (2015). Shared
steering control using safe envelopes for obstacle
avoidance and vehicle stability. IEEE Transactions on
Intelligent Transportation Systems, vol. 17(2), pp: 441-
451.
Khelfa, B., Ba, I., & Tordeux, A. (2023). Predicting
highway lane-changing maneuvers: A benchmark
analysis of machine and ensemble learning algorithms.
Physica A: Statistical Mechanics and its Applications,
vol. 612, pp: 128471.
Leurent, E. (2018). An Environment for Autonomous
Driving Decision-Making. Computer software.
Li, L. et al., (2022). Three principles to determine the right-
of-way for AVs: Safe interaction with humans. IEEE
Trans. Intell. Transp. Syst., vol. 23(7), pp. 7759– 7774.
Ma, C., & Li, D. (2023). A review of vehicle lane change
research. Physica A: Statistical Mechanics and its
Applications, pp: 129060.
Sun, Q., Wang, C., Fu, R., Guo, Y., Yuan, W., & Li, Z.
(2021). Lane change strategy analysis and recognition
for intelligent driving systems based on random forest.
Expert Systems with Applications, vol. 186, pp: 115781.
Sutton, R. S., and Barto, A. G., (2018). Reinforcement
Learning: An Introduction. Cambridge, MA, USA:
MIT Press.
Winsum, W.V., Waard, D.D., Brookhuis, K.A., (1999).
Lane change manoeuvres and safety margins, Transp.
Res. vol.2(3), pp: 139–149.
Ye, Y., Zhang, X., & Sun, J. (2019). Automated vehicle’s
behavior decision making using deep reinforcement
learning and high-fidelity simulation environment.
Transportation Research Part C: Emerging
Technologies, vol. 107, pp: 155-170.
Zhang, J., Chang, C., Zeng, X., & Li, L. (2022). Multi-agent
DRL-based lane change with right-of-way
collaboration awareness. IEEE Transactions on
Intelligent Transportation Systems, vol. 24(1), pp: 854-
869.
Enhancing Intelligent Vehicle Lane-Change Strategies Based on Deep Reinforcement Learning
207
