
Comparison of Lateral Controllers for Autonomous Vehicles Based on
Passenger Comfort Optimization
Akos Mark Bokor
1 a
, Adam Szabo
2 b
, Szilard Aradi
2 c
and Laszlo Palkovics
1,3 d
1
Systems and Control Laboratory, HUN-REN Institute for Computer Science and Control (SZTAKI),
Kende utca 13-17., H-1111 Budapest, Hungary
2
Department of Control for Transportation and Vehicle Systems, Faculty of Transportation Engineering and Vehicle
Engineering, Budapest University of Technology and Economics, M
˝
uegyetem rkp. 3., H-1111 Budapest, Hungary
3
Sz
´
echenyi Istv
´
an University, Egyetem t
´
er 1., H-9026 Gy
˝
or, Hungary
Keywords:
Autonomous Vehicles, Genetic Algorithm, Model-Based Control, Optimization.
Abstract:
This paper focuses on the design of lateral controllers for autonomous vehicles. To enhance passenger comfort
while concurrently maintaining minimal deviation from the desired trajectory, the developed controllers are
tuned by a Genetic Algorithm, whose cost function is following the ISO 2631 Standard. Three model-based
controllers, a Linear Quadratic Regulator, a Linear Quadratic Servo algorithm, and a Model Predictive Con-
troller have been compared in a simulation environment. The test case consists of a suburban road section,
where the vehicles must successfully traverse at different velocities while minimizing the lateral acceleration
and jerk affecting the passengers. To take into account the velocity-dependent dynamics of the system, the
controllers are based on a Linear Parameter-Varying model of the system. The results show that the devel-
oped controllers meet the specified requirements regarding the equivalent acceleration, Motion Sickness Dose
Value, and deviation from the desired trajectory.
1 INTRODUCTION
Research into vehicle lateral control has been an on-
going endeavor since the 1950s and remains a criti-
cal aspect of autonomous vehicle design in the face
of evolving technological needs and challenges. Al-
gorithms based on geometric principles such as Pure
Pursuit (Samuel et al., 2016) and Stanley controllers
(AbdElmoniem et al., 2020) have been successfully
used in several cases. Yet, these controllers of-
ten fail at handling more complex, dynamic driving
tasks. Subsequently, model-based solutions were in-
troduced. Initially, these were based on linear mod-
els, but they have progressively shifted towards more
complex nonlinear model-based strategies (Menhour
et al., 2012). Each evolution offers distinct advan-
tages and confronts specific limitations, particularly
the challenge of dealing with variable system param-
eters that complicate the development of fixed-gain
controllers.
a
https://orcid.org/0009-0005-4845-9923
b
https://orcid.org/0000-0003-1633-5588
c
https://orcid.org/0000-0001-6811-2584
d
https://orcid.org/0000-0001-5872-7008
Over the years, several key considerations have
shaped the design of lateral controllers. These in-
clude robust stability, computational capacity, and
precise reference signal tracking (G
´
asp
´
ar et al., 2016;
Tagne et al., 2015). However, integrating passenger
comfort into control system designs has become es-
sential as the industry achieves SAE Level 5 auton-
omy. This integration is crucial for enhancing mar-
ketability and providing a human-like driving expe-
rience (Cascetta et al., 2022). In recent years, this
goal has been pursued through machine learning al-
gorithms. For example, (Zhang et al., 2018) presents
an approach that utilizes a deep reinforcement learn-
ing algorithm to replicate human-like car-following
behavior with higher accuracy and adaptability than
traditional models. This integration ensures a more
accurate imitation of human driving styles and con-
tinuously updates the models with new data, enhanc-
ing the system’s adaptability and reliability in diverse
driving scenarios (Zhu et al., 2018), which is essential
for guaranteeing user safety and building trust in au-
tonomous systems. This can be achieved through var-
ious approaches; for instance, (Poussot-Vassal et al.,
2011) emphasizes using gain scheduling techniques
46
Bokor, A., Szabo, A., Aradi, S. and Palkovics, L.
Comparison of Lateral Controllers for Autonomous Vehicles Based on Passenger Comfort Optimization.
DOI: 10.5220/0012923700003822
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 1, pages 46-54
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
to adjust control parameters, enhancing vehicle dy-
namic stability.
The method proposed in (Li et al., 2019) breaks
the vision-based lateral control system down into a
perception and a control module. While the algo-
rithm outperformed model-based algorithms, there
are no guarantees regarding their robustness and
stability. Hence, another approach is to combine
machine-learning-based solutions with more conven-
tional control systems. Such an example is presented
in (Mashadi et al., 2014), where a Genetic Algorithm
is utilized to optimize a PID controller.
Besides ensuring precise reference tracking, the
emphasis on optimizing passenger comfort is rapidly
increasing. However, improved precision comes at
the cost of higher lateral acceleration, which may neg-
atively impact passenger comfort.(Tagne et al., 2015;
Mesghali, 2021) Addressing the trade-off between
precision in tracking and passenger comfort is par-
ticularly acute at higher speeds, where sharper ma-
neuvers lead to greater lateral accelerations. To mit-
igate these effects, implementing a speed-dependent
controller design is crucial. Techniques such as Gain
Scheduling and Linear Parameter Varying (LPV) con-
trol offer viable solutions to adjust controller gains
based on vehicle speed (N
´
emeth and G
´
asp
´
ar, 2011;
Zin et al., 2008; T
´
oth, 2010), thus optimizing both
performance and comfort across varying driving con-
ditions.
1.1 Related Work
Numerous methodologies exist for the design of con-
trollers that prioritize passenger comfort as a funda-
mental criterion for optimization. One such technique
involves minimizing the Motion Sickness Dose Value
(MSDV). The MSDV, adhering to the ISO 2631-1
standards, provides a quantitative index of passen-
ger comfort by explicitly accounting for the effects
of motion on the human vestibular system. The al-
gorithm proposed in (Moreno-Gonzalez et al., 2022)
is engineered to mitigate motion-induced discomfort
among passengers by adeptly managing vehicle dy-
namics, including acceleration and jerk.
In addition to minimizing the MSDV, passenger
comfort considerations can also be integrated into the
controller design. In (Sever et al., 2021), a gain-
scheduled Linear Quadratic Regulator (LQR) con-
troller is employed for this purpose, incorporating
modifications to account for both vertical and hori-
zontal motion components. This consideration is crit-
ical, as passengers, no longer needing to focus on
driving, may engage in activities that heighten their
susceptibility to motion sickness. A more traditional
approach is presented in (Luciani et al., 2020), where
the controllers are tuned concerning vehicle dynam-
ics and passenger comfort. The proposed method
integrates these considerations through a specialized
Model Predictive Control (MPC) design, optimizing
standard metrics for vibration and motion sickness
within the broader context of vehicle control.
These papers demonstrate that incorporating pas-
senger comfort considerations into controller design
does not significantly diminish the controllers’ path-
following capabilities. Instead, they produce substan-
tially better comfort outcomes than controllers de-
signed solely for path-following. However, there is
a notable gap in research comparing these optimized
controllers despite the potential for varying results
in both simulations and practical applications. This
highlights the importance of conducting more com-
parative analyses to understand their relative effec-
tiveness under similar comfort considerations.
1.2 Contributions
This paper presents three model-based lateral con-
trollers, which are tuned through an optimization al-
gorithm that incorporates a cost function consisting of
tracking accuracy and passenger comfort-related re-
quirements. The presented controllers are evaluated
and compared based on their performance with re-
spect to the equivalent acceleration, MSDV, and lat-
eral deviation.
The paper is organized as follows: Section 2
presents the Linear Parameter-Varying model describ-
ing the lateral vehicle dynamics. Section 3 and Sec-
tion 4 describe the implemented control algorithms
and the applied optimization algorithm. Section 5
deals with the simulation environment and test cases,
while Section 6 presents the evaluation of the results.
Section 7 shows some concluding remarks.
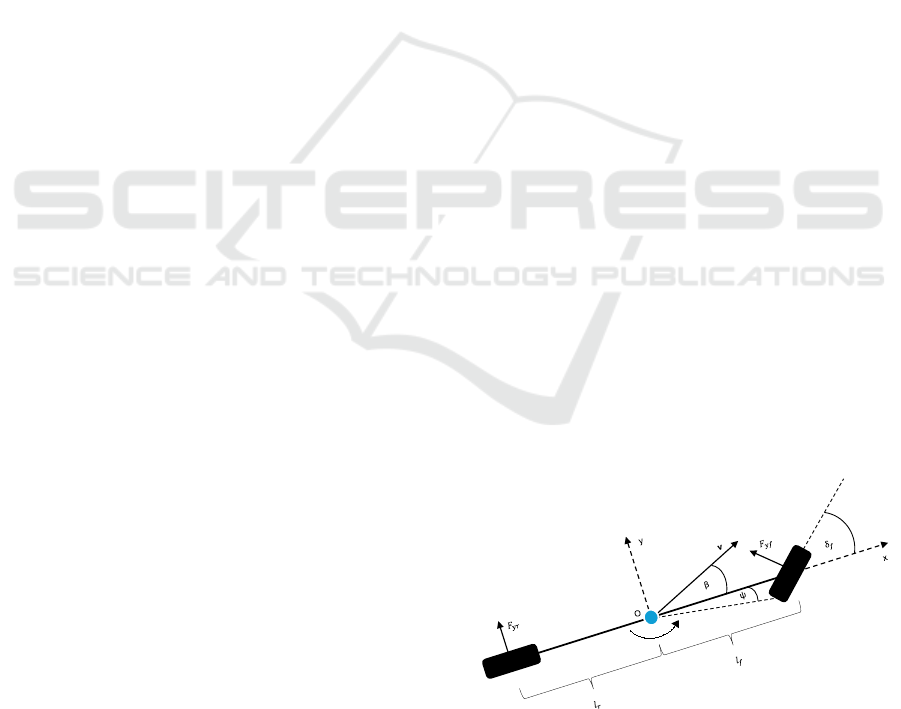
Figure 1: Lateral vehicle dynamics.
Comparison of Lateral Controllers for Autonomous Vehicles Based on Passenger Comfort Optimization
47

2 LATERAL VEHICLE MODEL
This paper uses a modified variant of the widely
known dynamic bicycle model, representing the ve-
hicle as a two-wheel-point system. Figure 1 shows
the lateral vehicle dynamics.
The equations of motion are derived as follows by
applying Newton’s second law and neglecting the im-
pact of road bank angle:
ma
y
= F
y f
+ F
yr
(1)
where a
y
is the inertial acceleration of the vehicle at
the center of gravity (c.g.) of the vehicle along the y-
axis, m is the mass of the vehicle, and F
y f
and F
yr
are
the front and rear lateral tire forces, respectively.
The inertial acceleration of the vehicle consists of
two components: lateral acceleration and centripetal
acceleration. Hence, the lateral motion of the vehicle
can be written as follows:
m( ¨y +V
x
˙
ψ) = F
y f
+ F
yr
(2)
where ¨y is the lateral acceleration of the vehicle, V
x
is
the longitudinal velocity at the c.g., and
˙
ψ is the yaw
rate.
The torque balance equation, which defines the
yaw dynamics of the vehicle, is written as follows:
I
z
¨
ψ = ℓ
f
F
y f
− ℓ
r
F
yr
(3)
where I
z
is the inertia of the vehicle along the z-axis,
ℓ
f
and ℓ
r
are the distances between the c.g. of the
vehicle and the front and rear tires, respectively.
Accounting for the interdependence between tire
forces and steering dynamics, the lateral tire forces
F
y f
and F
yr
are calculated by determining the rela-
tionship between slip angle and lateral force. The slip
angle, which is the difference between the orientation
of the wheel and the wheel velocity vector, directly
influences the lateral forces.
Assuming a linear relationship between the tire
forces and the slip, the front and rear lateral tire forces
are defined as follows:
F
y f
= 2C
f
(δ − θ
y f
) (4)
F
yr
= 2C
r
(−θ
yr
) (5)
where C
f
and C
r
represent the cornering stiffness co-
efficients of the front and rear tires, δ is the steering
angle, while θ
y f
and θ
yr
denote the angles of the front
and rear wheel velocity vectors, which are approxi-
mated using the small-angle assumptions:
θ
y f
=
˙y + ℓ
f
˙
ψ
V
x
(6)
θ
yr
=
˙y − ℓ
r
˙
ψ
V
x
(7)
The conventional bicycle model can be formulated
using Equations (1-7). However, based on (Rajamani,
2011), redefining the state variables to represent the
position and orientation error of the vehicle with re-
spect to the desired trajectory yields a more suitable
form for the development of a steering control sys-
tem. The state vector of the modified model is the
following:
x =
e
1
˙e
1
e
2
˙e
2
T
(8)
where e
1
represents the lateral deviation of the vehicle
from the road centerline, and e
2
represents the orien-
tation error relative to the road direction.
To follow the defined trajectory, the desired yaw
rate of the vehicle shall be calculated as follows:
˙
ψ
des
= V
x
κ (9)
where κ is the road curvature at the selected reference
point.
Through the desired yaw rate and assuming con-
stant longitudinal velocity, the derivatives of the error
states are defined as follows:
¨e
1
= ¨y +V
x
(
˙
ψ −
˙
ψ
des
) (10)
˙e
1
= ˙y +V
x
(ψ − ψ
des
) (11)
e
2
= ψ − ψ
des
(12)
˙e
2
=
˙
ψ −
˙
ψ
des
(13)
Assuming
¨
ψ
des
to be equal to zero, and combining
Equations (1-13) into Equation (14), the model can be
written in state-space representation.
From a control design point of view, the system
has a controllable input δ and an uncontrollable input
˙
ψ
des
, which is neglected during the synthesis of the
feedback controllers.
The resulting state and input matrices depend on
the longitudinal velocity of the vehicle; thus, the sys-
tem shows time-varying properties. Therefore, the
model is formulated using a grid-based LPV repre-
sentation. While a wide variety of LPV-based control
approaches are available to handle such systems, the
longitudinal velocity of the vehicle varies slowly in
most applications. Hence, the presented algorithms
use gain scheduling to deal with the time-varying na-
ture of the system.
3 CONTROL SYNTHESIS
This section details the theoretical background and
implementation of the presented controllers, includ-
ing a Linear Quadratic Regulator (LQR), a Linear
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
48

d
dt
e
1
˙e
1
e
2
˙e
2
=
0 1 0 0
0 −
2C
f
+2C
r
mV
x
2C
f
+2C
r
mV
x
−2C
f
l
f
+2C
r
l
r
mV
x
0 0 0 1
0 −
2C
f
l
f
−2C
r
l
r
I
z
V
x
2C
f
l
f
−2C
r
l
r
I
z
−
2C
f
l
2
f
+2C
r
l
2
r
I
z
V
x
e
1
˙e
1
e
2
˙e
2
+
0
2C
f
m
0
2C
f
l
f
I
z
δ +
0
−
2C
f
l
f
+2C
r
l
r
mV
x
−V
x
0
−
2C
f
l
2
f
+2C
r
l
2
r
I
z
V
x
˙
ψ
des
(14)
Quadratic Servo (LQ-Servo), and a Model Predictive
Controller (MPC). The controllers presented in this
paper have been implemented in discrete time with
1ms sampling time.
3.1 Linear Quadratic Regulator
The Linear Quadratic control problem is fundamental
in control theory (Athans and Falb, 2013). The first
step of the LQR synthesis is to transform the model
presented in Equation (14) into a discrete-time state-
space model:
x(k + 1) = Ax(k) + Bu(k) (15)
y(k) = Cx(k) + Du(k) (16)
where x(k) is the state vector at time step k, u(k) is
the input vector, A is the state transition matrix, and B
is the input matrix. y(k) is the output vector, C is the
output matrix, and D is the feedthrough matrix.
Therefore, (
˙
ψ
des
), the uncontrollable input of the
model is neglected, and then the presented continuous
model is discretized with 1ms sample time.
The objective of the LQR controller is to minimize
a quadratic cost function that considers the weighted
sum of the state and input vectors over an infinite hori-
zon:
J =
∞
∑
k=0
(x(k)
T
Qx(k) + u(k)
T
Ru(k)) (17)
where Q and R are positive (semi-)definite matrices
that weight the state and input vectors, respectively.
The minimum of the cost function can be found by
solving the Discrete-time Algebraic Riccati Equation
(DARE):
A
T
PA −P−A
T
PB(B
T
PB+R)
−1
B
T
PA +Q = 0 (18)
where P is a positive definite matrix, the solution of
the Riccati Equation. Using P, the optimal feedback
gain K is then determined as:
K = (B
T
PB + R)
−1
B
T
PA (19)
The optimal control input minimizing the cost
function is given as:
u(k) = −Kx(k) (20)
3.2 Linear Quadratic Servo
The linear quadratic servo approach augments the
output of the system with an integrator to ensure zero
steady-state error and achieve more accurate trajec-
tory tracking:
x(k + 1)
z(k + 1)
=
A 0
−C 0
x(k)
z(k)
+
B
I
u(k) (21)
where I is an identity matrix, and z(k) is the integral
of the output error.
Solving the Riccati equation for the augmented
system gives the following feedback gain:
K
I
=
K
K
z
= −(R + B
T
PB)
−1
(B
T
PA) (22)
Then, the optimal control input for LQ-Servo is
written as:
u(k) = −Kx(k) − K
z
z(k) (23)
3.3 Model Predictive Control
At last, an MPC has been implemented based on
(Wang, 2009), which solves a finite horizon, con-
strained optimization problem.
To ensure integral action, the state-space model is
reformulated in terms of state changes:
∆x(k) = x(k) − x(k − 1) (24)
∆u(k) = u(k) − u(k − 1). (25)
Incorporating these changes into the state equation
results in:
∆x(k + 1) = A∆x
m
(k) + B∆u(k). (26)
Then, a new state vector is formulated, which con-
nects the state changes and output:
Thus, the augmented state-space model is written
as:
ˆx(k) =
∆x(k + 1)
y(k + 1)
=
=
A 0
CA 1
∆x(k)
y(k)
+
B
CB
∆u(k),
(27)
ˆy(k) =
0 1
∆x(k)
y(k)
(28)
Comparison of Lateral Controllers for Autonomous Vehicles Based on Passenger Comfort Optimization
49
were 0 is a zero vector matching the state vector x
in size, and ˆ denotes the elements of the augmented
state-space model.
The augmented state-space equations are follow-
ing:
ˆx(k + 1) =
ˆ
Ax(k) +
ˆ
B∆u(k), (29)
ˆy(k) =
ˆ
C ˆx(k). (30)
The MPC algorithm aims to solve the following
constrained optimization problem:
min
∆U
J(∆U) =
N
p
∑
k=1
y
T
i
Qy
i
+
N
c
∑
k=1
∆u
T
i
R∆u
i
(31)
s.t.
∆u
min
≤ ∆u(k) ≤ ∆u
max
∀k ∈ N
c
u
min
≤ u(k) ≤ u
max
∀k ∈ N
c
where N
p
is the prediction horizon, N
c
is the control
horizon, and ∆u
min
, ∆u
max
, u
min
, u
max
are the con-
straints on the gradient and magnitude of the input
signal.
The presented constrained optimization problem
is typically solved using quadratic programming
(QP), as it is an effective way to sort out the active
constraints. On the other hand, utilizing the receding
horizon control principle of MPC, it is possible to im-
pose the constraints only on the first samples of the
variables.
Initalize
Population
Fitness
Evaluation
Stop
Condition
Best
Solution
YES
Survivor
selection
Crossover
Mutation
NO
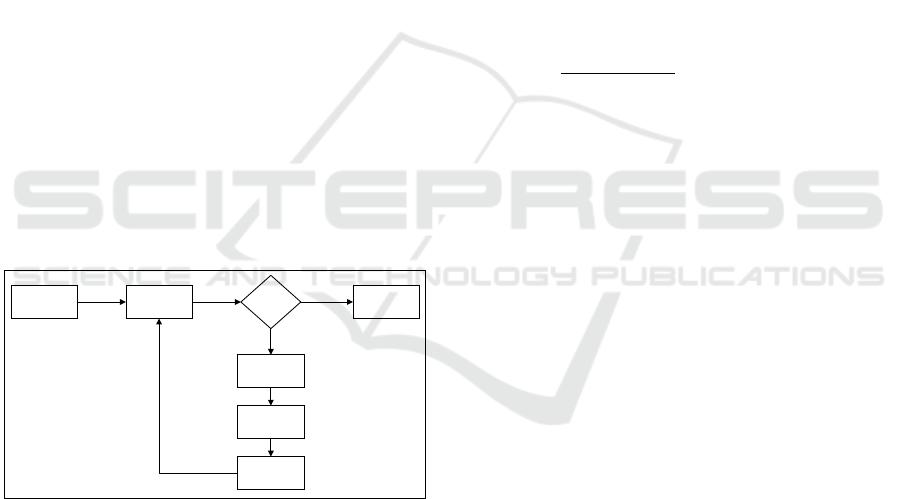
Figure 2: Blockdiagram of the Genetic Algorithm.
4 OPTIMIZATION
Given that the designed controllers are configured as
Single-Input Single-Output (SISO) systems, tuning
the R parameter in the cost function to adhere to the
specified passenger comfort criteria is sufficient. This
tuning approach accelerates the optimization process
and reduces computational demands. To find the con-
troller parameters, the Genetic Algorithm (GA) opti-
mization method (Mathew, 2012) has been selected.
Its simplified process is depicted in Figure 2.
The core of the GA starts with the initialization of
a population, which in this paper consisted of 20 in-
dividuals. Each individual, represented as a chromo-
some, encodes a potential solution to the optimization
problem. The diversity within this initial population
is crucial as it affects the ability of the algorithm to ex-
plore different areas of the solution space effectively.
The fitness of each chromosome is assessed based
on its suitability to solve the problem at hand, which,
in this case, was guided by a fitness function defined
as follows:
J
total
= J
a
y
+ J
˙a
y
+ J
e
1
+ J
δ
(32)
where J
a
y
, J
˙a
y
, J
e
1
and J
δ
are the penalty on lateral ac-
celeration, lateral jerk, lateral deviation, and steering
angle, respectively.
Each term of the fitness function is calculated us-
ing the same equation, which is provided for the lat-
eral acceleration term as an example:
J
a
y
=
(
R
T
t=0
(a
y,max
−|a
y
|)
2
T
W
a
y
if |a
y
| > a
y,max
0 otherwise
(33)
where W
a
y
is a weight derived from Bryson’s rule,
T is the simulation time, and a
y,max
is the maximum
allowed acceleration. The maximum allowed values
have been determined based on the ISO 2631 stan-
dard, the desired tracking accuracy, and the physical
limitations of the steering actuator.
The objective is to minimize oscillations, maxi-
mize the smoothness of the control process, reduce
lateral deviations from the desired path, and control
the peaks in the steering angles. This comprehensive
approach ensures that the optimization enhances com-
fort by smoothing acceleration and jerk and improves
path tracking and steering behavior.
After evaluating the fitness of the population, the
algorithm checks if the stopping condition is met.
This study defined the stopping condition as reaching
a maximum of 60 generations. If the stopping condi-
tion is not met, the algorithm proceeds with the selec-
tion of individuals for the next generation. This selec-
tion is typically based on fitness values, where better-
performing individuals are more likely to be selected,
ensuring that the advantageous traits are carried for-
ward.
The selected individuals then undergo crossover
and mutation processes. Crossover involves combin-
ing pairs of individuals (parents) to produce new in-
dividuals (offspring) by exchanging segments of their
chromosomes, thereby creating diversity while pre-
serving useful genetic information. Mutation intro-
duces random changes to individual chromosomes,
which helps maintain genetic diversity within the
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
50

population and prevents premature convergence to
suboptimal solutions. Each iteration of this process
determines a new R value based on the current popu-
lation. This value is then used to re-evaluate the fit-
ness function in the next iteration. This iterative pro-
cess continues until the fitness function converges to
an optimal solution, ensuring that the GA effectively
tunes the R parameter to meet the specified passenger
comfort criteria.
5 SIMULATION ENVIRONMENT
The control algorithms and optimization processes
have been implemented in the Matlab/Simulink en-
vironment. The simulation environment has been cre-
ated in the CarMaker software package. It has been
chosen for its ability to simulate real-world conditions
accurately and its well-defined Matlab interface.
Table 1: Vehicle Parameters.
Parameter Symbol Value Unit
Mass m 1463 [kg]
Inertia I
zz
1600 [kg · m
2
]
Distance from CoM to
front axle
l
f
1.1 [m]
Distance from CoM to
rear axle
l
r
1.58 [m]
Front cornering stiffness C
a f
80000 [N/rad]
Rear cornering stiffness C
ar
80000 [N/rad]
For the simulations, the default vehicle model of
CarMaker has been used, whose parameters are listed
in Table 1. The lateral acceleration and path deviation
have been measured using built-in inertial and road
sensors. The jerk was computed by differentiating the
acceleration and applying a low-pass filter to reduce
noise resulting from numerical differentiation.
The test case consists of a suburban road section,
which has been designed for a maximum 50 km/h ve-
hicle speed. Figure 3 illustrates the turning radius
and trajectory. According to (Kilinc and Baybura,
2012) and (Jagel
ˇ
c
´
ak et al., 2022), the ideal road radius
ranges between 230 m and 280 m, which corresponds
to a lateral acceleration of 1.47 m/s
2
. Consequently,
the curvatures of the road correspond to 230 m and
280 m turning radius.
6 RESULTS
Several key metrics have been considered to facili-
tate a comprehensive comparison. Based on (Luciani
et al., 2020) and the ISO 2631 standard, the equivalent
acceleration (a
eq
) and the MSDV value have been se-
lected as metrics of passenger comfort. Based on the
0 100 200 300 400 500 600 700 800 900
-200
-100
0
Y [m]
0 100 200 300 400 500 600 700 800 900
X [m]
-4
-2
0
2
4
6
[m
-1
]
10
-3
Figure 3: Desired path and road curvature.
likely passenger comfort, the equivalent acceleration
has been divided into different categories, shown in
Table 2.
Table 2: Likely reactions to various magnitudes of overall
vibration total values, specified in ISO 2631-1.
a
eq
[m/s
2
] Reaction
a
eq
≤ 0.315 Not uncomfortable
0.315 ≤ a
eq
≤ 0.63 A little uncomfortable
0.5 ≤ a
eq
≤ 1 Fairly uncomfortable
0.8 ≤ a
eq
≤ 1.6 Uncomfortable
1.25 ≤ a
eq
≤ 2.5 Very uncomfortable
a
eq
≥ 2 Extremely uncomfortable
To determine the equivalent acceleration, first, the
frequency-weighted root mean square (WRMS) ac-
celeration along the main axes is calculated as:
a
W
d
,RMS
=
1
T
f
Z
T
f
0
a
2
W
i
(t)dt
1
2
(34)
where T
f
represents the integration time, a
W
i
is the
frequency-weighted function, and a
W
d
,RMS
is the root
mean square of a
W
d
.
Then, the equivalent acceleration can be calcu-
lated as:
a
eq
=
q
k
2
x
a
2
x,W
+ k
2
y
a
2
y,W
(35)
Here, a
x,W
and a
y,W
are the frequency-weighted
RMS accelerations along the x and y axes, respec-
tively, and k
x
and k
y
are weighting factors. Assuming
k
x
= k
y
= 1 and neglecting the longitudinal acceler-
ation (as the longitudinal acceleration has been con-
stant), a
eq
can be calculated as the RMS of a
y,W
over
the entire track.
The second index evaluated is the Motion Sick-
ness Dose Value (MSDV), which describes the proba-
Comparison of Lateral Controllers for Autonomous Vehicles Based on Passenger Comfort Optimization
51
bility of motion sickness occurrence due to oscillatory
motion. This index is calculated similarly to a
eq
but
uses W
f
as the frequency-weighted function. Accord-
ing to the ISO 2631 standard, the likelihood of nausea
symptoms is calculated as follows:
a
MSDV
[%] =
1
3
· a
MSDV
× 100 (36)
Furthermore, the performance of the controllers
with respect to reference signal tracking and the con-
trol input has also been evaluated beyond passenger
comfort.
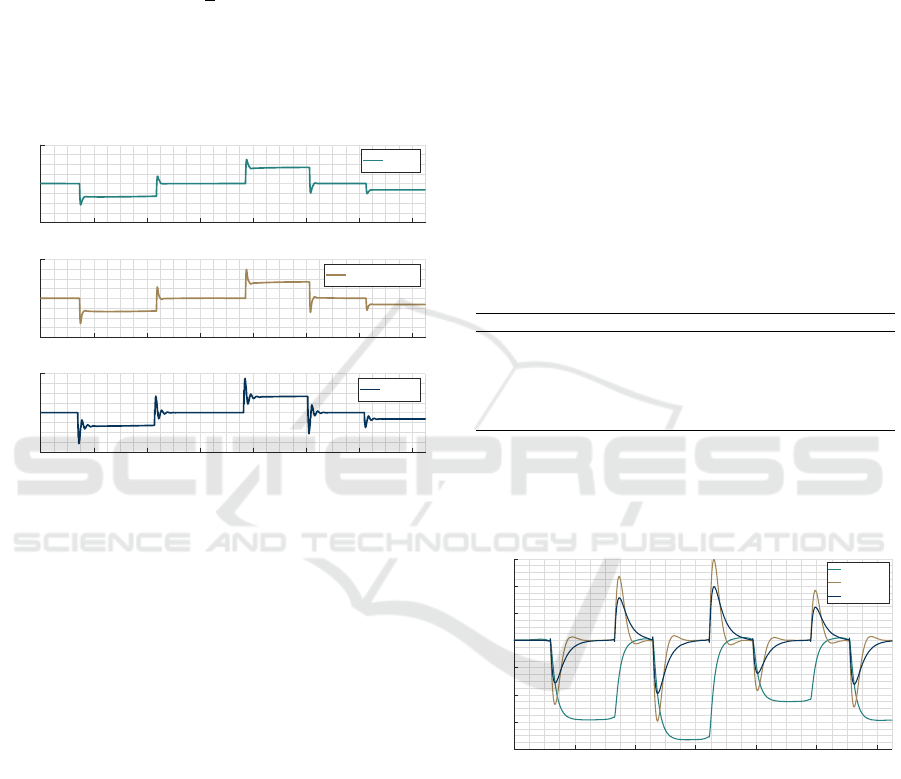
0 20 40 60 80 100 120 140
-2
0
2
LQR
0 20 40 60 80 100 120 140
-2
0
2
Lateral acceleration [m/s²]
LQ-Servo
0 20 40 60 80 100 120 140
Time [s]
-2
0
2
MPC
Figure 4: Lateral acceleration of the vehicles at 50 km/h.
As depicted in Figure 4, the observed peaks in ac-
celeration are primarily the result of sudden changes
in cornering. These peaks vary significantly among
different controllers. In the case of the LQR, the peaks
are confined within smaller limits due to the nature of
the control strategy. Conversely, the other two con-
trollers show larger acceleration peaks due to their in-
tegrating characteristics.
A more detailed examination of the controller per-
formance metrics is presented in Table 3. The data in-
dicates that all three controllers are in the ’not uncom-
fortable’ category with respect to equivalent accelera-
tion (a
eq
). This observation indicates a relatively uni-
form level of performance among the controllers con-
cerning passenger comfort across the entire track.
In particular, the LQR and LQ-Servo controllers
showed comparable a
eq
values, underscoring a con-
sistent response to dynamic vehicular motions. In
contrast, the Model Predictive Control (MPC) demon-
strated slightly elevated a
eq
values.
Considering the MSDV values, all three con-
trollers achieved approximately 4%, which complies
with the regulations.
Regarding the magnitude of the acceleration
peaks, the maximum values were most significant
in the MPC controller, nearly one and fifty percent
greater than those observed with the LQR. This high-
lights the higher responsiveness of the MPC con-
troller, which is caused by the augmentation of the
modified dynamic bicycle model.
The controllers have also been tested on the same
track at 70 km/h and 100 km/h speeds. The results
of these tests are presented in Table 4. It can be ob-
served that the maximum absolute acceleration and
MSDV values increase significantly as the curvature
has been defined for a lower maximum speed. How-
ever, in terms of equivalent acceleration (a
eq
), even at
100 km/h, only the MPC controller falls in the middle
of the ”a little uncomfortable” range, while the other
two controllers are near the bottom of this range, al-
most reaching the ”not uncomfortable” category.
Table 3: Controller performance comparison at 50 km/h.
Metric LQR LQ-Servo MPC
a
eq
[m/s
2
] 0.090642 0.096871 0.11723
a
MSDV
[%] 3.9759 3.9034 4.0441
a
peak
[m/s
2
] 1.193 1.42 1.752
Maximal Jerk [m/s
3
] 6.63 10.77 13.96
Average / maximal Lateral
Deviation [m]
0.0295 / 0.0731 0.0071 / 0.0594 0.007 / 0.0395
Input signal settling time [s] 0.376 0.426 0.837
While peak accelerations were associated with
corresponding increases in jerk magnitudes, higher
jerk does not necessarily equate to poorer passenger
comfort, according to (de Winkel et al., 2023).
20 40 60 80 100 120 140
Time [s]
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
Lateral deviation [m]
LQR
LQ-Servo
MPC
Figure 5: Comparison of the lateral deviations.
As Figure 5 shows, the LQR controller does not
reduce the steady-state error due to its lack of an in-
tegrating component. In contrast, although it shows
larger transient deviations, the LQ-Servo controller
effectively reduces this error to zero. This behav-
ior is attributed to the integrating element within the
LQ-Servo controller, designed to correct long-term
steady-state errors. However, the initial reduction and
subsequent overshoot of integrated errors can lead to
a delayed response from the controller. The MPC per-
forms best in terms of tracking accuracy. Specifically,
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
52

it achieves an order of magnitude smaller maximum
lateral deviation over the entire track compared to the
LQR controller.
The MPC is tuned to be the most aggressive,
resulting in the longest control signal settling time
among the controllers.
Table 4: Controller performance comparison at different
speeds.
Metric LQR LQ-Servo MPC
50 km/h
a
eq
[m/s
2
] 0.090642 0.096871 0.11723
a
MSDV
[%] 3.9759 3.9034 4.0441
Max absolute a
y
[m/s
2
] 1.2421 1.4737 1.7523
70 km/h
a
eq
[m/s
2
] 0.18601 0.18636 0.23495
a
MSDV
[%] 10.5429 10.6457 10.5926
Max absolute a
y
[m/s
2
] 2.3904 2.427 3.0725
100 km/h
a
eq
[m/s
2
] 0.35503 0.37098 0.52087
a
MSDV
[%] 22.9865 23.5348 22.5547
Max absolute a
y
[m/s
2
] 3.8248 3.9982 5.6173
7 CONCLUSION
This paper compared three model-based controllers
in terms of lateral acceleration and jerk as indicators
of passenger comfort and reference signal tracking.
These properties were optimized using a genetic algo-
rithm to ensure the controllers met the specified crite-
ria. All three controllers complied with the standards
described in the relevant regulations.
All three controllers achieved low reference track-
ing errors while meeting passenger comfort require-
ments for the given tracking bicycle model and the
specified simulation vehicle on the designated track.
Considering overall performance, including equiva-
lent acceleration, MSDV, lateral deviation, jerk, and
input signal settling time, the LQ-Servo controller
proved the most optimal. Although it slightly under-
performed compared to the MPC in reference track-
ing, it demonstrated twice as fast settling times and
20% lower peak accelerations, making it the best
choice in this simulation and model structure. Also,
the a
eq
were lower, especially at higher speeds.
These results suggest that the LQ-Servo controller
could be a promising option for real vehicle tests.
In future work, the integration of machine learning
methods with classical controllers for lateral vehicle
control will be considered. The robustness of these
algorithms against parametric uncertainties, such as
shifts in the center of mass, payload changes, and
tire variations, will be evaluated. Additionally, their
performance in handling lateral disturbances like side
wind gusts will be analyzed, with a focus on both ve-
hicle stability and passenger comfort, including the
potential for motion sickness.
ACKNOWLEDGEMENTS
This work was supported by the European Union
within the framework of the National Laboratory for
Autonomous Systems (RRF-2.3.1-21-2022-00002).
REFERENCES
AbdElmoniem, A., Osama, A., Abdelaziz, M., and
Maged, S. A. (2020). A path-tracking algo-
rithm using predictive stanley lateral controller. In-
ternational Journal of Advanced Robotic Systems,
17(6):1729881420974852.
Athans, M. and Falb, P. L. (2013). Optimal control: an in-
troduction to the theory and its applications. Courier
Corporation.
Cascetta, E., Carteni, A., and Di Francesco, L. (2022). Do
autonomous vehicles drive like humans? a turing ap-
proach and an application to sae automation level 2
cars. Transportation research part C: emerging tech-
nologies, 134:103499.
de Winkel, K. N., Irmak, T., Happee, R., and Shyrokau, B.
(2023). Standards for passenger comfort in automated
vehicles: Acceleration and jerk. Applied Ergonomics,
106:103881.
G
´
asp
´
ar, P., Szab
´
o, Z., Bokor, J., and N
´
emeth, B. (2016).
Robust control design for active driver assistance sys-
tems. Springer, Book, 10:978–3.
Jagel
ˇ
c
´
ak, J., Gnap, J., Kuba, O., Frnda, J., and Kostrzewski,
M. (2022). Determination of turning radius and lateral
acceleration of vehicle by gnss/ins sensor. Sensors,
22(6):2298.
Kilinc, A. S. and Baybura, T. (2012). Determination of min-
imum horizontal curve radius used in the design of
transportation structures, depending on the limit value
of comfort criterion lateral jerk. TS06G-Engineering
Surveying, Machine Control and Guidance.
Li, D., Zhao, D., Zhang, Q., and Chen, Y. (2019). Re-
inforcement learning and deep learning based lat-
eral control for autonomous driving [application
notes]. IEEE Computational Intelligence Magazine,
14(2):83–98.
Luciani, S., Bonfitto, A., Amati, N., and Tonoli, A. (2020).
Model predictive control for comfort optimization in
assisted and driverless vehicles. Advances in Mechan-
ical Engineering, 12(11):1687814020974532.
Mashadi, B., Mahmoudi-Kaleybar, M., Ahmadizadeh,
P., and Oveisi, A. (2014). A path-following
driver/vehicle model with optimized lateral dynamic
controller. Latin American journal of solids and struc-
tures, 11:613–630.
Mathew, T. V. (2012). Genetic algorithm. Report submitted
at IIT Bombay, 53.
Menhour, L., Lechner, D., and Charara, A. (2012). De-
sign and experimental validation of linear and nonlin-
ear vehicle steering control strategies. Vehicle system
dynamics, 50(6):903–938.
Comparison of Lateral Controllers for Autonomous Vehicles Based on Passenger Comfort Optimization
53

Mesghali, K. (2021). Control tuning of autonomous
vehicles considering performance-comfort trade-offs.
Master’s thesis, School of Industrial and Information
Engineering.
Moreno-Gonzalez, M., Artu
˜
nedo, A., Villagra, J., Join, C.,
and Fliess, M. (2022). Speed-adaptive model-free lat-
eral control for automated cars. IFAC-PapersOnLine,
55(34):84–89.
N
´
emeth, B. and G
´
asp
´
ar, P. (2011). Road inclinations in the
design of LPV-based adaptive cruise control∗. IFAC
Proceedings Volumes, 44(1):2202–2207.
Poussot-Vassal, C., Sename, O., Dugard, L., and Savaresi,
S. (2011). Vehicle dynamic stability improvements
through gain-scheduled steering and braking control.
Vehicle System Dynamics, 49(10):1597–1621.
Rajamani, R. (2011). Vehicle dynamics and control.
Springer Science & Business Media.
Samuel, M., Hussein, M., and Mohamad, M. B. (2016). A
review of some pure-pursuit based path tracking tech-
niques for control of autonomous vehicle. Interna-
tional Journal of Computer Applications, 135(1):35–
38.
Sever, M., Zengin, N., Kirli, A., and Arslan, M. S. (2021).
Carsickness-based design and development of a con-
troller for autonomous vehicles to improve the com-
fort of occupants. Proceedings of the Institution of
Mechanical Engineers, Part D: Journal of Automobile
Engineering, 235(1):162–176.
Tagne, G., Talj, R., and Charara, A. (2015). Design
and comparison of robust nonlinear controllers for
the lateral dynamics of intelligent vehicles. IEEE
Transactions on Intelligent Transportation Systems,
17(3):796–809.
T
´
oth, R. (2010). Modeling and identification of linear
parameter-varying systems, volume 403. Springer.
Wang, L. (2009). Model predictive control system de-
sign and implementation using MATLAB, volume 3.
Springer.
Zhang, Y., Sun, P., Yin, Y., Lin, L., and Wang, X. (2018).
Human-like autonomous vehicle speed control by
deep reinforcement learning with double q-learning.
In 2018 IEEE intelligent vehicles symposium (IV),
pages 1251–1256. IEEE.
Zhu, M., Wang, X., and Wang, Y. (2018). Human-
like autonomous car-following model with deep rein-
forcement learning. Transportation research part C:
emerging technologies, 97:348–368.
Zin, A., Sename, O., Gaspar, P., Dugard, L., and Bokor,
J. (2008). Robust LPV-H ∞ control for active sus-
pensions with performance adaptation in view of
global chassis control. Vehicle System Dynamics,
46(10):889–912.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
54
