
Image Discrimination and Parameter Analysis Based on
Convolutional Neural Networks (CNN)
Jiahan Hu
a
College of Transportation Engineering, Tongji University, Shanghai, China
Keywords: Deep Learning, Image Classification, Parameter Selection.
Abstract: In the realm of deep learning, various fields benefit from its wide-ranging applications. Image classification
stands out as a classic task in computer vision, demanding meticulous selection of model parameters. The
objective of this study is to investigate how model structure, regularization techniques, and optimizers
influence model performance and identify the optimal configuration from available options. The research
compares the accuracy fluctuations of two model architectures, three regularization methods, and four
optimizers in classifying images sourced from the Cifar-10 dataset. Through this analysis, the optimal
convolutional neural networks (CNN) model configuration is determined, exhibiting superior performance in
the task. Additionally, the findings underscore the importance of judiciously selecting model parameters based
on specific needs and computational costs when deploying deep learning techniques. This study offers
valuable insights into parameter selection and further refinement of deep learning models, aiding their
optimization for practical applications. Notably, the approach sheds light on the intricate interplay between
model architecture, regularization techniques, and optimizer selection, enriching the understanding of deep
learning model design and optimization strategies.
1 INTRODUCTION
Deep learning, as one of the most popular research
fields, is widely applied in various fields. With the
enrichment of datasets and the improvement of
computer computing power, deep learning models
have been created to address various issues. These
models are intended to have various mechanics and
structures. However, no matter how complex the
model is, the selection of parameters and optimizers
in the model is crucial, which will have an immediate
impact on the model's performance.
One of the reasons deep learning is getting more
and more attention is its conspicuous performance in
computer vision tasks. A fundamental problem in
computer vision is image classification, which
involves assigning images to one of several
predetermined labels. Positioning, detection, and
segmentation are a few computer vision tasks that can
be considered as building blocks from image
classification tasks (Karpathy, 2017). Therefore,
comparing the effects of models with different
structures and parameters in image classification has
guiding significance for further optimization of
a
https://orcid.org/0009-0000-1271-579X
models. In the past few decades, image classification
has attracted the attention of researchers all over the
world. To get better performances in the task, models
with a variety of structures and parameters are
developed. As a classic deep learning model, the
convolutional neural networks (CNN) model can
complete various tasks. CNN model can help people
identify objects from blurred images (Hossain, 2019).
After further development of the CNN model,
maxout, a new activation function is used in trainings
with dropout, which can avoid inability to use filters
by designing a maximum gradient (Goodfellow,
2013). Later, in order to intentionally guide the model
to some features, Dual attentive fully convolutional
siamese networks (DasNet) is proposed.
Reinforcement learning is a method that this deep
neural network with feedback connections can learn
(Stollenga, 2014). Using DasNet, researchers can
selectively direct internal attention to certain features
extracted from the image, making the model more
targeted. Researchers have made a number of
structural changes to CNN in an effort to enhance its
functionality even more. For example, recursive
convolutional neural networks (RCNN) enhance the
Hu, J.
Image Discrimination and Parameter Analysis Based on Convolutional Neural Networks (CNN).
DOI: 10.5220/0012937000004508
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Engineering Management, Information Technology and Intelligence (EMITI 2024), pages 295-300
ISBN: 978-989-758-713-9
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
295

ability of CNN to capture patterns in context by
adding loop connections so that cells can be
modulated by other cells in the same layer (Liang,
2015). Dense convolutional networks (DenseNet) are
proposed to solve the problem of overfitting in deep
learning models. As the number of parameters rises,
DenseNets consistently improves accuracy by
directly combining any two layers with the same
feature picture size, showing no symptoms of
overfitting or performance loss (Huang, 2017). To
identify the nonlinear relationship in the information,
the regularization methods have also been improved.
Drop-Activation employs deterministic networks
with altered nonlinearities for prediction, randomly
eliminates nonlinear activations from the network
during training, and adds randomization to the
activation function (Liang, 2020).
The efficacy of image classification extends
beyond merely the model itself; other factors wield
significant influence. Dataset availability, model
design, and researchers' expertise play pivotal roles in
determining model effectiveness (Lu, 2007). In the
realm of CNN models, factors like optimizer
selection, learning rate, epoch count, batch size, and
activation function profoundly impact accuracy
(Nazir, 2018). For example, when using CNN models
to extract spatial features for hyperspectral image
(HSI) classification, several optimizers perform
differently: stochastic gradient descent (SGD),
adaptive moment estimation (Adam), adaptive
gradient (Adagrade), root mean square propagation
(RMSprop), and nesterov-accelerated adaptive
moment estimation (Nadam) (Bera, 2020). This
article's primary objective is to construct image
classification models and delve into the ramifications
of diverse model architectures through the lens of
deep learning. Notably, the optimizer emerges as a
crucial determinant in model update iterations.
Furthermore, the study meticulously scrutinizes and
contrasts the effects of parameters such as learning
rate and epoch count on model performance. By
juxtaposing the accuracy of multilayer perceptron
(MLP) and CNN models in addressing image
classification challenges, the differential impact of
various model structures is succinctly summarized.
Both CNN and MLP stand as formidable models in
the realm of image analysis, adept at effectively
representing and modeling data. Additionally,
through deliberate manipulation of individual
parameters and subsequent observation of accuracy
shifts, this article delineates the nuanced impact of
each parameter on the CNN model. Such insights not
only foster a deeper comprehension of parameter
influences but also furnish valuable reference points
for future model optimization endeavors.
2 METHODOLOGIES
2.1 Dataset Description and
Preprocessing
The dataset chose to train the models is Cifar-10. It
comes from Department of Computer Science,
University of Toronto (Krizhevsky, 2009). It has sixty
thousand 32x32 color pictures divided into ten
classes: truck, airplane, car, cat, deer, dog, frog,
horse, and so forth. With 10,000 photos apiece, the
dataset is split into five training batches and one test
batch. The dataset has been used in image
classification problems widely. Images in the dataset
are low-resolution ( 32 × 32 ), which require less
computer power and can train the models quickly.
Another reason for selecting this dataset is to test the
models’ ability of classifying creatures and objects in
the real world. Because the structures of MLP model
and CNN model are different, the dataset need to be
processed differently. For the dataset of the MLP
model, the data is first converted into a tensor format
acceptable to PyTorch. Then the images are
normalized by scaling the pixel values between -1 and
1. For the dataset of the CNN model, the images are
first stored as a 32 × 32 matrix. The labels are
converted into a two-valued matrix (one-hot
encoding). Finally, it is also necessary to normalize
the data by scaling the pixel value between 0 and 1.
2.2 Proposed Approach
This paper's principal goal is to compare the MLP
model's accuracy to that of the CNN model, while
also scrutinizing the effects of different optimizers
and regularization techniques during training.
Subsequently, the aim is to identify the optimal
combination of parameters to construct and predict
with the model. In comparing the two models, both
are constructed using the RMSprop optimizer. Each
model undergoes training for 100 epochs, and their
respective accuracies are plotted for comparative
analysis. Upon determining the superior model
structure through comparison, the appropriate
optimizer and regularization method are selected.
Three types of regularization techniques are
employed to construct models, and their respective
accuracies are evaluated. Additionally, four distinct
optimizers are utilized to build models, with their
EMITI 2024 - International Conference on Engineering Management, Information Technology and Intelligence
296
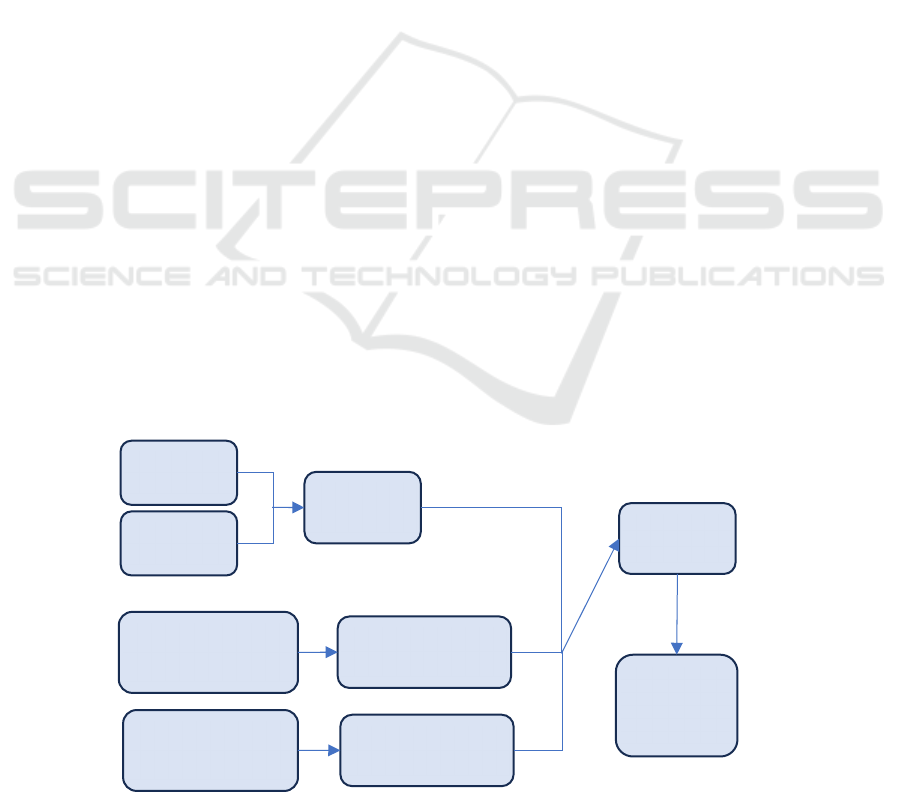
accuracies subsequently compared. Following the
identification of the optimal combination of
regularization, optimizer, and epoch count, the final
model undergoes training and prediction. The
comprehensive process is illustrated in Figure 1
below.
2.2.1 MLP
One kind of feedforward neural network is the MLP.
The input layer, hidden layer, and output layer make
up an MLP. The hidden layer is represented by
learning features, the output layer generates the final
prediction, and the input layer receives the input data.
Each neuron of the hidden layer and the output layer
have activation functions which are used to introduce
nonlinear mapping. For the purpose of trying to
update the network parameters during training, the
error is backpropagated from the output layer back to
the input layer using the backpropagation technique,
which is required by MLP.
2.2.2 CNN
A popular deep learning model for computer vision
applications is CNN. CNN can handle image and
sequence data more efficiently than a standard neural
network because it can automatically identify
characteristics in images and extract relevant
information. Pooling layers, fully linked layers, and
convolutional layers make up CNN. CNN will
simultaneously apply certain regularizations to avoid
overfitting.
Convolution operation, which may determine an
image's sliding window and extract features through
filtering and pooling layers, is a fundamental
component of CNN. Convolution is a useful way to
minimize processing while maintaining the image's
spatial structural information. Pooling layers, without
altering the feature map's dimension, can lower
computation and increase the model's resilience.
2.2.3 Loss Function
When constructing MLP model and CNN model, the
Cross Entropy is used as the loss function. Cross
Entropy is often used in classification tasks, where it
can judge how close the actual and expected outputs
of a model are. The calculation formula is as follows:
𝐿𝑜𝑠𝑠
∑
𝑥𝑙𝑜𝑔𝑥
(1)
The 𝑥 is the true label and the 𝑥 is the prediction label
output by the model. Since a picture corresponds to
only one label in general, there is only one 1 in the 𝑥
corresponding to a picture in the normalized label
data. For example, if 𝑥
1, 0, 0
, 𝑥
0.6, 0.3, 0.1, then the loss is calculated as follows:
𝐿𝑜𝑠𝑠 1×𝑙𝑜𝑔0.6 0×𝑙𝑜𝑔0.3 0×
𝑙𝑜𝑛𝑔0.1 𝑙𝑜𝑔0.6 (2)
2.3 Implementation Details
Some implementation details are explained below.
First of all, the task is done in Spyder (python 3.9),
and the training of the model is done on the GPU of
the personal computer. Secondly, the MLP model is
built by the torch framework, and the CNN model is
built by the keras framework. Thirdly, to draw an
image whose accuracy varies with the epoch, its
accuracy is recorded after each training session.
Thirdly, in order to draw images of the models’
changing accuracies, their accuracies are recorded
after each training epoch.
Figure 1: Overall process (Photo/Picture credit: Original).
MLP
CNN
Model
Structu
r
Three
Regularizations
Regularization
Four
Optimizers
Optimizer
Build
Model
Train
and
Predic
t
Image Discrimination and Parameter Analysis Based on Convolutional Neural Networks (CNN)
297
3 RESULTS AND DISCUSSION
This part compares and analyzes the models’ training
results. When constructing the model, the major
considerations are the effects of regularization,
optimizer, and model structure on accuracy. All three
affect the training and accuracy of the models.
3.1 Model Structure
After using the RMSprop and loss (cross entropy) to
build the models, the MLP model and the CNN
model are trained 100 epochs respectively. The
accuracies of the two models is shown in Figure 2.
Figure 2: Accuracies of the two models (Photo/Picture
credit: Original).
The Figure 2 illustrates that the accuracy of the
CNN model varies in a large range, while the
accuracy of the MLP model has been maintained in a
small interval. From the highest accuracy achieved
by the models, the CNN’s is 79.54%, while the
MLP’s is 52.13%. There is a large difference between
the two accuracies, which indicates that the model
structure has a significant impact on the training
results. It can be seen from the comparison that CNN
has more advantages, so the CNN model is chosen in
the subsequent trainings.
3.2 Regularization
From the above results, it can be seen that the model
has reached the optimal accuracy when the epoch is
22. For more efficient training, the following
trainings use 30 epoch. After the models are
constructed and trained, the accuracy variation
graphs of weight norm penalties (WNP), early
stopping (ES) and data augmentation (DA) can be
obtained in Figure 3.
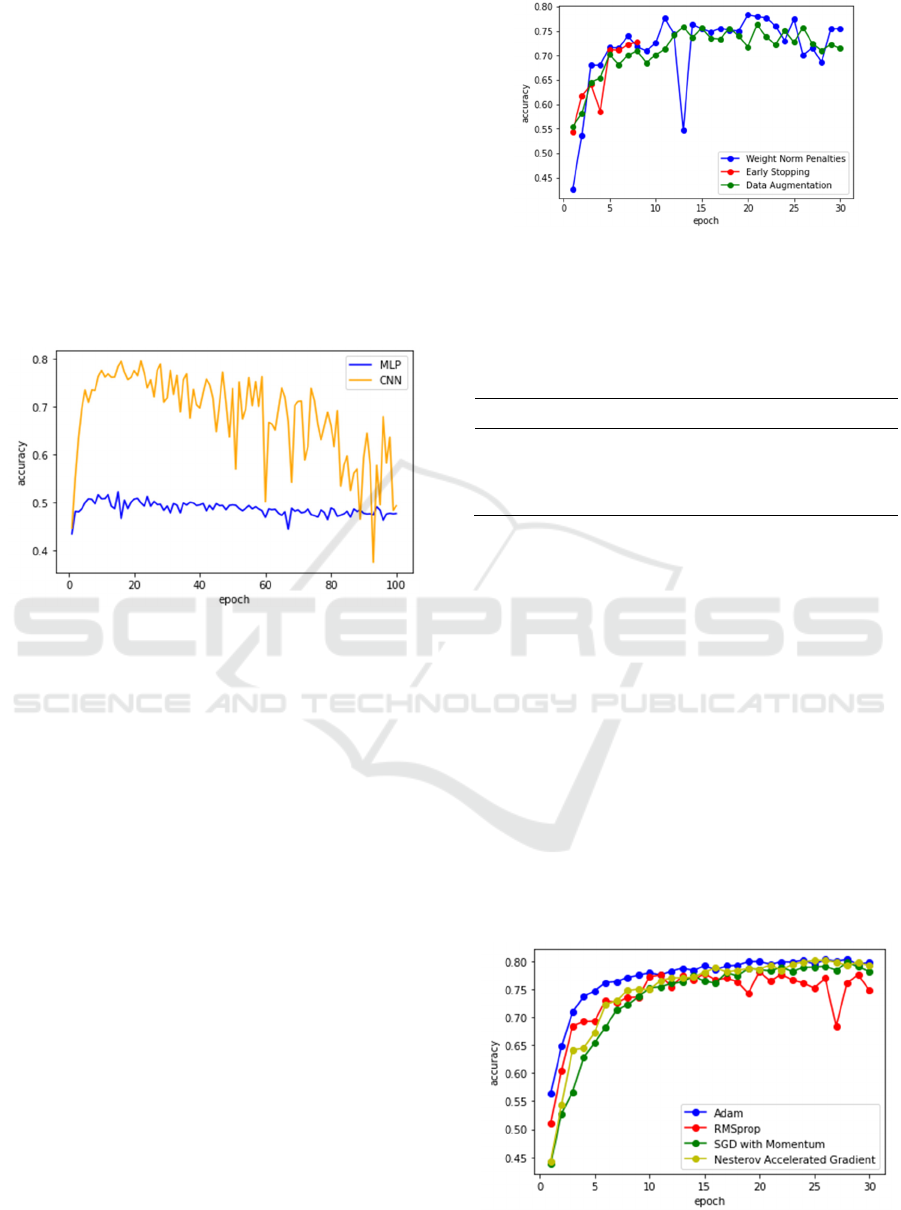
WNP has the highest accuracy of 78.36%. The
highest accuracies of the three regularizations and
Figure 3: Accuracy variations of three regularizations
(Photo/Picture credit: Original).
the corresponding epoch are shown in the following
table.
Table 1: Accuracies and epoch of three regularizations.
Re
g
ularizations Accurac
y
E
p
och
WNP 78.36% 20
ES 72.85% 8
DA 76.33% 21
As shown in the Table 1, WNP is a regularization
method with weights, which can effectively constrain
the size of models’ parameters and control models’
complexity. WNP can also facilitate the model to
learn more generalized feature representations, which
improve the model's performance in image
classification tasks. Remarkably, although WNP has
the highest accuracy, ES achieves a high accuracy
after 8 training stops. This can make the model
training more convenient and faster.
3.3 Optimizer
Four optimizers, Adam, RMSprop, SGD and
nesterov accelerated gradient (NAG), are used to
build and train the models. The accuracy variations
are shown in the Figure 4.
Figure 4: Accuracy variations of four optimizers
(Photo/Picture credit: Original).
EMITI 2024 - International Conference on Engineering Management, Information Technology and Intelligence
298
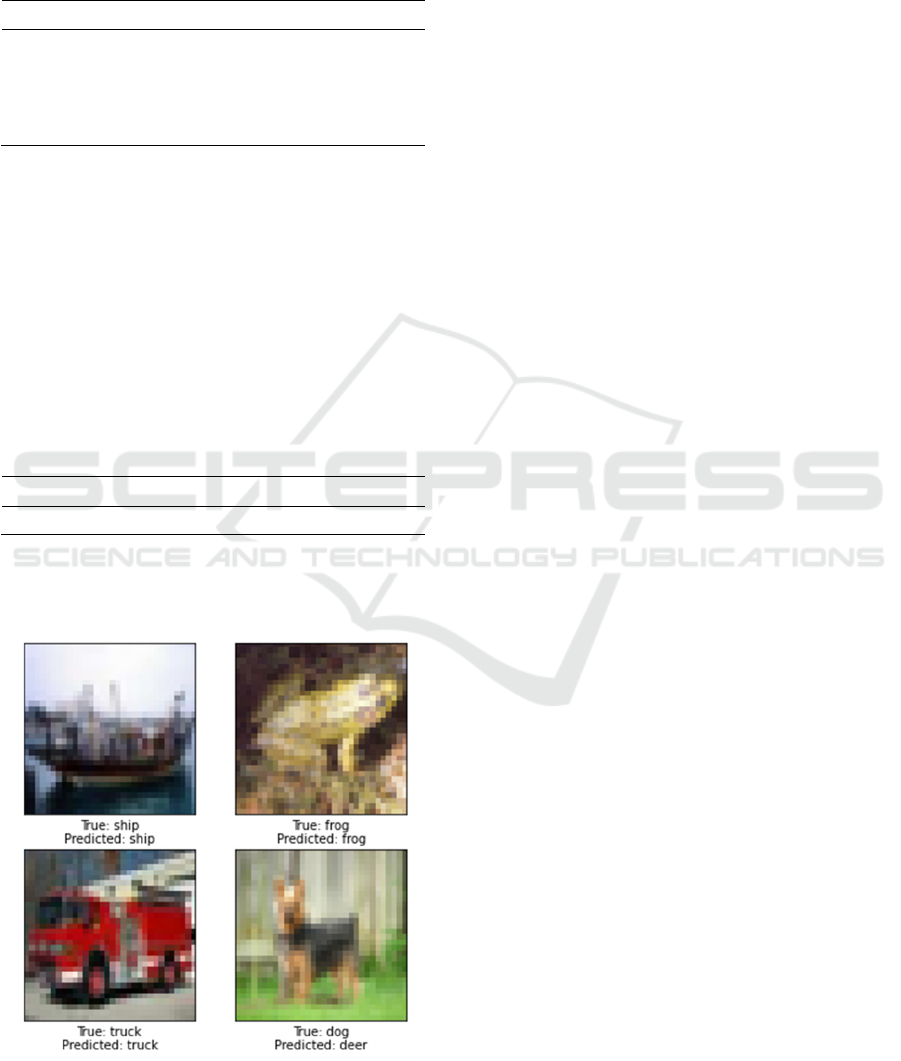
The model constructed by Adam has the highest
accuracy of 80.27%. The highest accuracies reached
by the four optimizers and the corresponding epoch
are shown in the Table 2.
Table 2: Accuracies and epoch of four optimizers.
Re
g
ularizations Accurac
y
E
p
och
Adam 80.27% 28
RMSprop 78.09% 20
SGD 79.76% 28
NAG 80.11% 25
Adam includes an adjustable learning rate
function that allows it to dynamically modify the
learning rate during training in order to accommodate
various parameter characteristics.
3.4 Final Model
After the model structure, regularization, and
optimizer are selected, the final model can be built.
The parameters and accuracy of the final CNN model
are shown in the Table 3.
Table 3: Parameters and accuracy of final model.
Re
g
ularization O
p
timize
r
E
p
och Accurac
y
WNP Adam 28 79.86%
Following model training, classification
predictions can be produced. A few of the anticipated
outcomes are displayed in Figure 5.
Figure 5: Classification prediction results (Photo/Picture
credit: Original).
It can be seen that the classification effect of the
model is good, and most objects can be correctly
classified. But some objects with ambiguous features
can be misjudged. It should be pointed out that due to
the randomness of machine learning, the final
model's correctness is different from the accuracy in
the selection process.
4 CONCLUSION
This study sheds light on the impact of model
structure, regularization techniques, and optimizers
on accuracy, aiming to pinpoint the optimal
parameter combination for the final model.
Employing two distinct model structures, three
regularization methods, and four optimizers, we
conducted a comprehensive analysis of each
variable's influence. At each stage, a singular
parameter was manipulated to construct various
models, with subsequent comparison of their
performance through accuracy change visualization.
This approach enabled us to discern the influence of
each parameter and identify the optimal parameter
combination. Our findings indicate that the CNN
model outperforms the MLP model in Cifar-10 image
classification tasks, with WNP demonstrating the
most favorable effect among the three regularization
methods, and Adam emerging as the top-performing
optimizer among the four options. Notably, the
efficacy of various parameters varies across different
deep learning tasks, underscoring the need for careful
consideration of theoretical and empirical factors
when determining the optimal parameter
combination. Furthermore, it is crucial to recognize
that optimal accuracy does not necessarily equate to
the optimal model, as factors such as data structure,
training cost, and task requirements must be
comprehensively evaluated. Looking ahead, future
research endeavors will explore the influence of
additional parameters on model performance, with a
focus on identifying optimal parameter combinations
for advanced models that excel in image
classification tasks.
REFERENCES
Karpathy, A. (2017). Convolutional neural networks for
visual recognition. Notes accompany the Stanford CS
class CS231.
Hossain, M. A., & Sajib, M. S. A. (2019). Classification of
image using convolutional neural network (CNN).
Image Discrimination and Parameter Analysis Based on Convolutional Neural Networks (CNN)
299

Global Journal of Computer Science and Technology,
19(D2), 13-18.
Goodfellow, I., Warde-Farley, D., Mirza, M., Courville, A.,
& Bengio, Y. (2013, May). Maxout networks. In
International conference on machine learning, 1319-
1327, PMLR.
Stollenga, M. F., Masci, J., Gomez, F., & Schmidhuber, J.
(2014). Deep networks with internal selective attention
through feedback connections. Advances in neural
information processing systems, 27.
Liang, M., & Hu, X. (2015). Recurrent convolutional
neural network for object recognition. In Proceedings
of the IEEE conference on computer vision and pattern
recognition, 3367-3375.
Huang, G., Liu, Z., Van Der Maaten, L., & Weinberger, K.
Q. (2017). Densely connected convolutional networks.
In Proceedings of the IEEE conference on computer
vision and pattern recognition, 4700-4708.
Liang S, Khoo Y, Yang H. Drop-activation: implicit
parameter reduction and harmonious regularization.
Communications on Applied Mathematics and
Computation, 2021, 3, 293-311.
Lu, D., & Weng, Q. (2007). A survey of image
classification methods and techniques for improving
classification performance. International journal of
Remote sensing, 28(5), 823-870.
Nazir, S., Patel, S., & Patel, D. (2018, July). Hyper
parameters selection for image classification in
convolutional neural networks. In 2018 IEEE 17th
International Conference on Cognitive Informatics &
Cognitive Computing (ICCI* CC), 401-407, IEEE.
Bera, S., & Shrivastava, V. K. (2020). Analysis of various
optimizers on deep convolutional neural network
model in the application of hyperspectral remote
sensing image classification. International Journal of
Remote Sensing, 41(7), 2664-2683.
Krizhevsky, A., & Hinton, G. (2009). Learning multiple
layers of features from tiny images, University of
Toronto, 7.
EMITI 2024 - International Conference on Engineering Management, Information Technology and Intelligence
300
