
Efficacy and Efficiency in Object Detection: Exploring YOLOv9
on Limited Resources
Yangkai Zhou
a
College of Intelligence and Computing, Tianjin University, Tianjing, China
Keywords: Deep Learning, Object Detection, YOLO, Performance Testing, Network Architecture.
Abstract: The introduction of the You Look Only Once v9 (YOLOv9) algorithm marks a significant milestone in the
realm of object detection, notably tackling the inherent information bottleneck in deep learning while
enhancing model accuracy and parameter efficiency across various tasks. This advancement translates into
expedited and more precise detection capabilities, surpassing its predecessor, the YOLO algorithm, as well
as other modelling methodologies. This paper endeavours to delve into the performance evaluation of
YOLOv9 and explore strategies for effectively training the model on small datasets and with limited
computational resources. Through meticulous hyperparameter tuning, careful selection of optimizers, and
comparison between YOLOv9-c and YOLOv9-e model variants, this study aims to ascertain the most suitable
learning rates, batch sizes, and optimizers to optimize training efficacy. The insights garnered from this
research serve as a valuable guide for small research teams and individuals facing computational constraints,
providing them with a robust framework to streamline experimental processes and enhance overall efficiency
in model development and training procedures. Ultimately, this paper contributes to advancing the
accessibility and effectiveness of object detection methodologies in diverse settings and applications.
1 INTRODUCTION
A key task named object detection which contains
Object detection is an important problem in the field
of computer vision and one of the most challenging
problems in the field of computer vision, which is
widely used in many fields such as video monitoring,
automatic piloting, face recognition, to name just a
few. In the last decade, thanks to the rapid
development of deep learning, significant progress
has been made in the field of deep learning-based
modelling computer vision, especially the
development of the field of object detection has been
applied in a large number of applications. Many
powerful system architectures and learning methods
have emerged, including Convolutional Neural
Networks (CNNs) (Huang, 2017), Transformers
(Dosovitskiy, 2020; Tu, 2022) and Mambas (Liu,
2024).
In order to improve the model performance, the
loss function (Chen, 2020; Rezatofighi, 2019) and the
label assignment strategies (Wang, 2021) is proposed
to increase the generalization of the objective
a
https://orcid.org/0009-0006-8801-3640
function. These efforts aim to accurately map the
input data to the target task.
However, traditional neural network models
usually have a large number of parameters, which can
lead to the need for deeper networks often when
dealing with large-scale datasets, where the number
of network parameters rises dramatically with the size
of the dataset. The computational complexity of the
model will thus increase dramatically, and it is also
prone to overfitting. And for long-distance-dependent
tasks, traditional neural networks may face modeling
difficulties. Especially when dealing with long
sequence data, the model may lose the information
related to long distances in the sequence. Further,
most of the previous methods ignore the fact that
there may be a large amount of information loss in the
input data during the forward propagation process,
and this information loss can lead to biased gradient
flow, and updating the model on such a basis is likely
to cause the deep network to establish incorrect
correlations between the target and the inputs, which
will make the training model produce incorrect
predictions (Wang, 2024).
390
Zhou, Y.
Efficacy and Efficiency in Object Detection: Exploring YOLOv9 on Limited Resources.
DOI: 10.5220/0012938700004508
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Engineering Management, Information Technology and Intelligence (EMITI 2024), pages 390-398
ISBN: 978-989-758-713-9
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
Yolov9, as the latest version of the You Look
Only Once (YOLO) series, not only has higher
detection accuracy, but also has a significant
improvement in inference speed, reaching a new
State-of-the-art (SOTA) on the MS COCO dataset,
and becoming one of the research hotspots in the field
of object detection. It addresses these challenges
through the introduction of Programmable Gradient
Information (PGI) and the introduction of
Generalized Efficient Layer Aggregation Network
(GELAN) by improving the information retention
and gradient flow, thus preventing false associations
between targets and inputs (Wang, 2024). In terms of
object detection detection performance, the object
detection method which base on GELAN and PGI
outperform previous "train from scratch" methods,
and also outperform RT DETR (Lv, 2023), which
uses large datasets for pre-training, and Yolo MS,
which is based on a deep convolutional design, in
terms of parameter utilization (Wang, 2024; Chen,
2023). PGI's applicability spans from lightweight to
large-scale models, and is able to be applied to a
variety of models without the need for large pre-
training The applicability of PGI spans from
lightweight to large models, and is able to train
models from scratch with very good performance
without the need for large pre-training datasets.
This study will focus on evaluating the
performance of the Yolov9 model through a series of
targeted investigations. Firstly, the model's sensitivity
to batch size, a critical factor in its performance, is
examined, and the interplay between batch size and
learning rate is explored to optimize the training
process. Secondly, the effectiveness of different
optimizers in model training is compared,
determining the best-fit optimizer and corresponding
learning rate for Yolov9. Additionally, the
performance of different scale variants of Yolov9,
namely Yolov9-c and Yolov9-e, is assessed by
comparing their training performance under varying
conditions. Furthermore, the impact of different
optimizers on the performance of these models is
investigated. This study is aiming to present a
straightforward yet efficient method for testing and
optimizing the training and performance of the
Yolov9 model on the COCO128 dataset, offering
valuable insights and solutions for object detection
tasks, particularly for small research teams or those
with limited computational resources. This study
serves as a practical reference for optimizing the
utilization of Yolov9 in target detection tasks,
particularly for resource-constrained research teams.
2 METHODOLOGIES
2.1 Dataset Description and
Preprocessing
In this study, the COCO128 dataset was chosen as the
main data source for the study.COCO128 is the first
128 sheets of the dataset Microsoft Common Objects
in Context (MS COCO), which is a large-scale multi-
category object detection dataset containing more
than 80 categories totaling more than one million The
MS COCO dataset is a large-scale multi-category
target detection dataset that contains more than 80
categories totaling more than one million images
which cover a variety of real scenes, such as indoor
and outdoor scenes, and thus is highly representative
and challenging. Each image of the COCO128 dataset
is labeled with the bounding box of one or more
objects and their category information, and also
contains segmentation masks and key points for the
objects, as well as a preference for images in which
the target co-occurs with its scene, i.e., non-iconic
images, which can reflect visual semantics and are
more in line with the requirements of the image
understanding task. This detailed labeling
information makes it one of the ideal datasets for
tasks of object detection, instance segmentation, pose
estimation and so on.
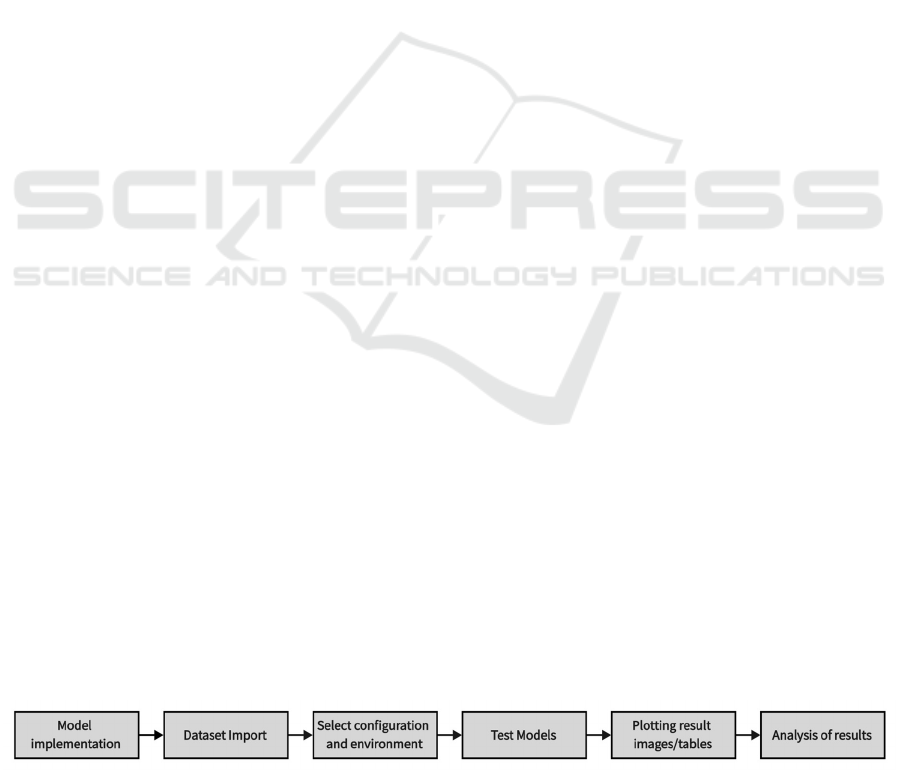
2.2 Proposed Approach
This study will focus on exploring the performance of
optimizing the Yolov9 model and investigating the
performance of Yolov9 under each condition. In
general, the experiment firstly reproduces the model
and imports the dataset, then the training
configuration and environment are selected, the
experiment-testing model is started, and finally the
images/tables are drawn based on the results and the
analysis is given. The pipeline is shown in the Figure
1.
Figure 1: General flow of the experiment
(Picture credit: Original).
Efficacy and Efficiency in Object Detection: Exploring YOLOv9 on Limited Resources
391

This study will not be limited to a single Yolov9
model, but will delve into two models, Yolov9-c and
Yolov9-e, to explore models with different sizes and
number of parameters, and for the different
performances of hyper-parameter tuning hyper and
optimizer choices, this study will try to find the
optimal combinations in order to make the model
converge faster and get better performance during the
training process. Performance. The detail is shown in
the Figure 2.
The study first tests the performance of the
Yolov9 model by tuning the hyperparameters,
selecting the optimizer and fixing the epoch, and
continuously adjusting different learning rates to train
the model and record the performance.
Secondly, this experiment adjusts the batch size
and learning rate to explore the most suitable and
matching learning rate of the two models under
different batch sizes to improve the training effect and
efficiency.
On this basis, explore how many epochs after
which the large model Yolov9-e outperforms the
small model Yolov9-c, and explore the efficiency and
effectiveness of their training, and what the change in
the relationship reflects.
Finally, different optimizer choices are used to
explore the impact of different optimizers on the
training effectiveness of Yolov9, and the learning rate
is adjusted in parallel to explore the optimizer that has
the best effect on the performance of the model with
which it has the best effect on the performance of the
optimizer and the learning rate that matches it.
Figure 2: Experimental details flow
(Picture credit:
Original).
2.2.1 Yolov9 Model Structure and Features
Yolov9 builds on the foundation of Yolov7 with an
updated architecture that combines the
Programmable Gradient Information (PGI) concept
with the Generative Latent Embedding for Object
Detection (ELAN) architecture to further enhance its
functionality in object detection, representing a major
leap forward in accuracy, speed, and efficiency, and
solidifying its position as a next-generation top-of-
the-line real-time object detector.
Yolov9 maintains the signature features of the
Yolo family by providing real-time object detection
compared to other object detection models and its
predecessors in the Yolo family. This means that it
can quickly process an input image or video stream
and accurately detect objects within it without
compromising speed.
At the same time, Yolov9 uses for the first time
the concept of Programmable Gradient Information
(PGI), which allows the model to make the gradient
more reliable and stable by aiding reversible
branching, as shown in the Figure 3. This ensures that
the deep features retain the key features required to
perform the target task, addressing the problem of
information loss during deep neural network
feedforward. In addition, it uses the GELAN
architecture, a new architecture that allows
parameters to be optimized, computational
complexity to be significantly reduced, and accuracy
and inference speed to be improved. GELAN
enhances the flexibility and efficiency of Yolov9 by
allowing the user to select the appropriate
computational module for different inference devices.
Yolov9's architecture can be easily integrated into a
variety of systems and environments due to its better
accuracy with fewer parameters and computations,
making it suitable for a wide range of applications
including surveillance, self-driving vehicles, robotics,
and more.
Figure 3: YOLOv9 model structure
(Picture credit:
Original).
2.2.2 Information Bottleneck Principle &
Reversible Functions
The information bottleneck principle shows that the
loss of information often occurs when data X is in the
process of being transformed, as shown in the
following equation:
( , ) ( , ( )) ( , ( ( )))IXX IX f X IXg f X
θϕθ
≥≥
(1)
In this equation, the mutual information is denoted
by I, the transformation functions are f and g, and the
EMITI 2024 - International Conference on Engineering Management, Information Technology and Intelligence
392

operations of the two successive layers in the neural
network are denoted by as
f
θ
and
g
ϕ
well,
respectively.
As neural networks deepen, there's a risk of
information loss in each layer, affecting the model's
ability to retain original data and leading to unreliable
gradients during training. Yolov9 addresses this
challenge by incorporating reversible architectures,
ensuring that each layer preserves complete original
information. By utilizing reversible functions,
Yolov9 maintains reliable gradients for model
updates, enabling convergence even in deep networks.
Additionally, Yolov9 leverages transformer models
to find inverse transformations, ensuring that features
retain sufficient information despite complex
mappings, thus enhancing model performance.
There are other models that use other methods to
solve the above problem. For example, Diffusion
Models and Variational Autoencoder (VAE), both of
which have the ability to find inverse functions.
However, because lightweight models will be under-
parameterized during the training process, a large
number of parameters will be transformed and
become a large amount of raw data, and when
applying these methods to lightweight models,
vulnerabilities will occur. Similarly, I (Y, X), which
maps data X to important information about the target
Y, is subject to the same problem. To address this
issue, Yolov9 discusses the adoption of the concept
of information bottlenecks:
(, ) (,) (, ()) (,)I X X IY X IY f X IYZ
θ
≥≥ ≥
(2)
Although
(, )
I
YX
only accounts for a small
portion of
(,)
I
XX
,it is crucial to the target task.
Therefore, even if a lot of information is not lost in
the forward propagation phase during model fallout,
the training effect will be greatly undermined as long
as
(, )
I
YX
is lost. In the down-parameterized state, it
is difficult for a lightweight model not to easily lose a
lot of important information in the forward
propagation phase. Therefore, it is a crucial part for
lightweight models to figure out how to filter
(, )
I
YX
from
(,)
I
XX
accurately.
In Yolov9, the reversible architecture's operation
units maintain the property of reversible
transformation to ensure that the output feature maps
of each operation unit layer retain the complete
original information.
2.2.3 Programmable Gradient Information
(PGI)
The PGI consists of 3 main parts, i.e., main branch,
auxiliary reversible branch, and multilevel auxiliary
information. Among them, the auxiliary reversible
branch is involved in the process of neural network
deepening, which improves the problem of deepening
the network has a good improvement. Network
deepening causes information bottlenecks that
prevent the loss function from generating reliable
gradients.
The concept of auxiliary reversible branching
ensures minimal information loss during forward
propagation by maintaining the integrity of input data.
However, directly constructing the main branch into
a fully reversible form can significantly increase
inference time, potentially hindering higher-order
semantic learning. In the PGI framework, the
auxiliary reversible branch acts as a deep supervision
mechanism during training, providing
complementary information flow and precise
gradient updates. This approach ensures that critical
feature information is retained, aiding in the
extraction of relevant features for the target task.
Multilevel auxiliary information addresses error
accumulation in deep supervision, especially for
models with multiple predictive branches. It
integrates an integration network between
hierarchical layers of the feature pyramid and the
main branch to combine gradients from different
prediction heads. This aggregated gradient
information, containing all target objects, updates the
main branch parameters, preventing dominance of
specific object information in the feature pyramid
hierarchy. Yolov9's approach mitigates information
leakage in deep supervision and allows flexibility in
choosing the semantic levels required to guide
learning in networks of various sizes.
2.2.4 Generalized Efficient Layer
Aggregation Network (GELAN)
Yolov9 generalized the capabilities of ELAN,
whereas the original ELAN uses only a stack of
convolutional layers, GELAN can use any
computational block as a base Module (Wang, 2022).
GELAN is a novel architecture designed by
combining two neural network architectures, i.e.,
combining with gradient path planning Cross Stage
Partial Network (CSPNet) and ELAN to design a
Generalized Efficient Layer Aggregation Network
with a combination of lightweight, speed of inference,
and accuracy. GELAN ensures flexibility by allowing
Efficacy and Efficiency in Object Detection: Exploring YOLOv9 on Limited Resources
393

any computational block to extend the layer
aggregation of ELAN. The architecture is designed to
achieve efficient feature aggregation while
maintaining competitive performance in terms of
speed and accuracy. The overall design of GELAN
incorporates the cross-level partial connectivity of
CSPNet and the efficient layer aggregation of ELAN
for effective gradient propagation and feature
aggregation. The structure is shown in the Figure 4.
Figure 4: GELAN structure
(Picture credit: Original).
2.3 Implementation Details
During model execution, key aspects include
hyperparameter tuning. Initial settings involve a
learning rate of 0.01 and a batch size of 16. Exploring
batch size and learning rate relationships, the learning
rate decreases incrementally with halving batch size
(ensuring it remains a power of 2). Initially,
Stochastic Gradient Descent (SGD) optimizers are
chosen for their computational speed and
convergence. Subsequent optimizer exploration
involves Adaptive Moment Estimation (Adam), and
EvoLved Sign Momentum (LION), with
simultaneous learning rate adjustments to gauge their
impact on model performance. Yolov9 preprocesses
datasets by letterboxing, adding grey bars, and
adjusting batch dimensions from HWC to CHW,
enhancing size, diversity, and generalization ability,
thus reducing overfitting. The comparison highlights
two YOLOv9 models: YOLOv9-c (compact) and
YOLOv9-e (extended). YOLOv9-C, the compact
model, surpasses its predecessor, YOLO MS-S, by
reducing parameters and computational loads while
improving AP accuracy by 0.4% to 0.6%. YOLOv9-
E excels in balancing model complexity and detection
accuracy, markedly reducing parameters and
computation requirements while enhancing accuracy,
as shown in the Figure 5.
3 RESULTS AND DISCUSSION
This section thoroughly examines the performance of
the YOLOv9 model, focusing on key aspects. It
begins by analyzing the impact of varying learning
rates on both YOLOv9-c and YOLOv9-e models.
Figure 5:
YOLOv9-c and YOLOv9-e size comparison
(Picture credit: Original).
EMITI 2024 - International Conference on Engineering Management, Information Technology and Intelligence
394

Next, it investigates the effects of batch size and
learning rate on model performance, identifying
optimal training strategies. The study then compares
the training iterations required for YOLOv9-c and
YOLOv9-e models and explores their differences
during training. Finally, it assesses the influence of
different optimizers on model performance,
highlighting their advantages and disadvantages.
These analyses offer valuable insights for optimizing
YOLOv9 model performance and guide further
research in this area.
3.1 Effect of Learning Rate on the
Performance of Yolov9-c and
Yolov9-e Models
In this part, SGD is chosen as the optimizer for the
experiment, because SGD possesses the advantages
of low computational cost and avoidance of local
minima due to stochasticity, which is conducive to the
test of learning rate. Meanwhile, the epochs value is
chosen to be 1500 to ensure that the model can
converge sufficiently to ensure optimization at
different learning rates. The trend of model
performance with learning rate is shown in the
following Figure 6.
The performance trend of both YOLOv9-c and
YOLOv9-e models is evident across different
learning rates (0.1, 0.05, 0.01, 0.005). Initially,
performance gradually improves with increasing
learning rates, peaking at around 0.94. However, a
rapid decline occurs beyond this point, resulting in
significant performance loss at learning rates of
0.0005 and 0.0001. This decline is attributed to
selecting excessively small learning rates, leading to
the models being trapped in local optima despite the
effects of SGD, thus hindering normal training
outcomes. Additionally, the experiment revealed that
due to its deeper model structure and increased
parameters, YOLOv9-e is more sensitive to learning
rate adjustments compared to YOLOv9-c.
Consequently, even small changes in learning rates
have a more pronounced impact on YOLOv9-e's
performance, resulting in greater fluctuations during
adjustments.
(a)
(b)
Figure 6:
Effect of learning rate on YOLOv9-c/e model
(Picture credit: Original).
3.2 Effect of Batch Size and Learning
Rate on Model Performance
In this section, SGD serves as the optimizer to better
illustrate the influence of learning rate and batch size
on model performance. The mean Average Precision
(mAP) is selected as the performance metric due to its
comprehensive evaluation of Precision and Recall,
offering a nuanced assessment across different
detection categories. For instance, when training
YOLOv9-c with a 4090 graphics card, a batch size of
16 fully utilizes video memory without causing 'Out
of Memory' errors. However, for YOLOv9-e, with its
larger model size, the batch size needs to be reduced
by 8 to ensure optimal performance. This disparity in
batch sizes presents an intriguing discussion point
regarding their impact on training outcomes.
The model performance and the corresponding
learning rate in relation to epochs and batch size are
shown in the Table 1.
Efficacy and Efficiency in Object Detection: Exploring YOLOv9 on Limited Resources
395

Table 1: Batch size and learning rate matching and performance of YOLOv9-c/e.
YOLOc9-c YOLOc9-e
batch size learning rate mAP@0.5 epochs batch size learning rate mAP@0.5 epochs
16 0.01 0.91069 800 8 0.01 0.93639 1200
16 0.005 0.92175 1200 8 0.005 0.87780 1200
8 0.01 0.92392 1200 4 0.01 0.90821 1200
8 0.005 0.88570 1500 4 0.005 0.90698 1500
Figure 7:
Training efficiency of YOLOv9-c/e
(Picture credit: Original).
The experimental test includes learning rates of
0.1, 0.05, 0.01, 0.005, and 0.001. The table highlights
the optimal learning rates - 0.01 and 0.005 - for
discussion. When training yolov9-c with a batch size
of 16, both 0.01 and 0.005 yield comparable results,
but 0.005 requires over 50% more iterations. Thus,
0.01 is recommended for its balance of effectiveness
and efficiency. Similarly, with a batch size of 8, 0.01
outperforms 0.005 by nearly 4% in mAP, making it
the preferred choice. For yolov9-e, at a batch size of
8, 0.01 achieves a nearly 6% higher mAP compared
to 0.005, reinforcing its recommendation. When the
batch size reduces to 4, 0.01 and 0.005 yield similar
results, but with fewer epochs required, 0.01 is
preferred. Hence, 0.01 is consistently recommended
as the optimal learning rate.
3.3 Training Efficiency of Yolov9-c and
Yolov9-e
Due to the substantial disparity in volume between
yolov9-c and yolov9-e, including their layer count,
parameter quantity, and computational complexity,
their selection for practical applications varies based
on specific requirements. Therefore, assessing the
number of iterations for both models is crucial,
offering insights into their training efficiency. In this
experiment, SGD serves as the optimizer, with mAP
employed as the evaluation metric. To prevent
memory overflow, a batch size of 8 is selected.
The trend of the training effect of the two models
with the growth of epoch is shown in the Figure 7.
The training curves of yolov9-c and yolov9-e in
Fig. indicate that yolov9-c exhibits notably superior
training efficiency in the initial stages, consistently
maintaining a higher mAP compared to yolov9-e.
Although yolov9-e eventually surpasses yolov9-c
after approximately 1,400 epochs, the margin of
improvement is marginal. Throughout continued
training, yolov9-c maintains a slight edge over
yolov9-e. Therefore, for datasets with modest size
and less stringent requirements on generalization and
accuracy, prioritizing training efficiency and model
speed, yolov9-c is recommended due to its simpler
parameter count, lower computational complexity,
and commendable training results.
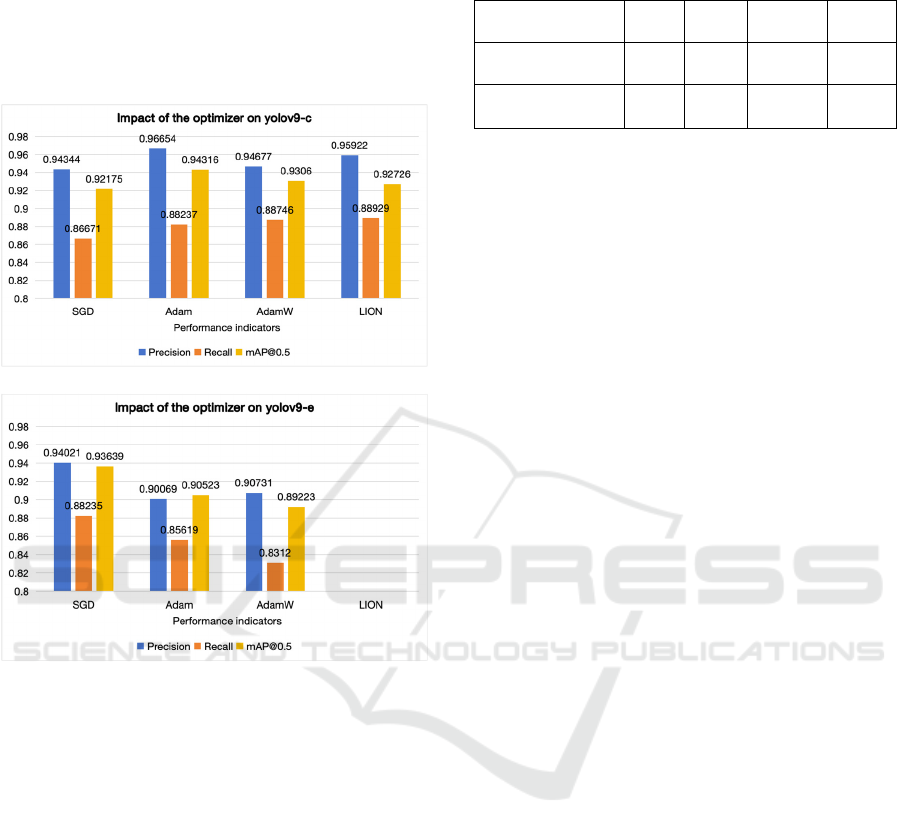
3.4 Impact of Different Optimizers on
Model Performance
Different optimizers have different impacts on
different models, in different cases the selection of
specific optimizers will bring improvement to the
experiment, at the same time, different optimizers
also have different training efficiency, in the practical
application will be based on the demand and the
specific model to choose different optimizers.
Therefore, it is of great interest to discuss the impact
of the optimizer on the model performance. In this
part of the experiment, the learning rate of 0.1-
EMITI 2024 - International Conference on Engineering Management, Information Technology and Intelligence
396
0.00001 and the corresponding epochs are chosen,
and the batch size of yolov9-c is 16, and that of
yolov9-c is 8, to make full use of the video card
memory.
The best performance of the two models with
different optimizers is shown in the Figure 8.
(a)
(b)
Figure 8:
The different results of two models (Picture
credit: Original).
In this experiment, the impact of different
optimizers on yolov9-c and yolov9-e models is
assessed. For yolov9-c, all four optimizers yield
satisfactory results, with Adam demonstrating
optimal performance. Conversely, for the larger
yolov9-e model, SGD proves to be the most effective
optimizer. Notably, the LION optimizer struggles to
converge, particularly on yolov9-e, indicating its
suitability for larger batch sizes. Given these findings,
the LION optimizer may not be suitable for
experiments with limited GPU memory, and SGD is
recommended as a more suitable alternative.
The learning rates for the above experimental
results for yolov9-c and yolov9-e are shown in the
Table 2.
Table 2:
Learning rate of YOLOv9-c/e for different
optimizer.
Method\optimizer SGD Adam AdamW LION
YOLOv9-c 0.005 0.001 0.001 0.0001
YOLOv9-e 0.01 0.001 0.001 None
4 CONCLUSIONS
This study investigates the training efficacy and
performance of YOLOv9 models, crucial for
resource-constrained research teams venturing into
object detection. By training and testing on the
COCO128 dataset with limited GPU memory,
optimal learning rates and batch sizes for yolov9-c
and yolov9-e are determined. Findings reveal that
yolov9-e is more sensitive to learning rate
adjustments, particularly with SGD as the optimizer.
Yolov9-c performs best with a batch size of 16, while
yolov9-e prefers a batch size of 8, both with a learning
rate of 0.01. Moreover, yolov9-c demonstrates
superior training efficiency and comparable
performance to yolov9-e on small datasets. The study
recommends Adam for yolov9-c and SGD for
yolov9-e on small datasets, cautioning against using
the LION optimizer due to batch size limitations.
Future research will delve into exploring yolov9's
performance with larger datasets and computational
resources, focusing on maximizing detection speed
without compromising accuracy.
REFERENCES
Huang, G., Liu, Z., Van Der Maaten, L., & Weinberger, K.
Q. (2017). Densely connected convolutional networks.
In Proceedings of the IEEE conference on computer
vision and pattern recognition, pp: 4700-4708.
Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn,
D., Zhai, X., Unterthiner, T., & Houlsby, N. (2020). An
image is worth 16x16 words: Transformers for image
recognition at scale. arXiv :2010.11929.
Tu, Z., Talebi, H., Zhang, H., Yang, F., Milanfar, P., Bovik,
A., & Li, Y. (2022, October). Maxvit: Multi-axis vision
transformer. In European conference on computer
vision, pp: 459-479.
Liu, Y., Tian, Y., Zhao, Y., Yu, H., Wang, Y., & Liu, Y.
(2024). Vmamba: Visual state space model.
arXiv:2401.10166.
Chen, K., Lin, W., Li, J., See, J., Wang, J., & Zou, J. (2020).
AP-loss for accurate one-stage object detection. IEEE
Efficacy and Efficiency in Object Detection: Exploring YOLOv9 on Limited Resources
397

Transactions on Pattern Analysis and Machine
Intelligence, vol. 43(11), pp: 3782-3798.
Rezatofighi, H., Tsoi, N., Gwak, J., Sadeghian, A., Reid, I.,
& Savarese, S. (2019). Generalized intersection over
union: A metric and a loss for bounding box regression.
In Proceedings of the IEEE/CVF conference on
computer vision and pattern recognition,pp. 658-666.
Wang, J., Song, L., Li, Z., Sun, H., Sun, J., & Zheng, N.
(2021). End-to-end object detection with fully
convolutional network. In Proceedings of the
IEEE/CVF conference on computer vision and pattern
recognition, pp: 15849-15858.
Wang, C. Y., Yeh, I. H., & Liao, H. Y. M. (2024). YOLOv9:
Learning What You Want to Learn Using
Programmable Gradient Information. arXiv:
2402.13616.
Lv, W., Xu, S., Zhao, Y., Wang, G., Wei, J., Cui, C., ... &
Liu, Y. (2023). Detrs beat yolos on real-time object
detection. arXiv:2304.08069.
Chen, Y., Yuan, X., Wu, R., Wang, J., Hou, Q., & Cheng,
M. M. (2023). YOLO-MS: rethinking multi-scale
representation learning for real-time object detection.
arXiv:2308.05480.
Wang, C. Y., Liao, H. Y. M., & Yeh, I. H. (2022).
Designing network design strategies through gradient
path analysis. arXiv:2211.04800.
EMITI 2024 - International Conference on Engineering Management, Information Technology and Intelligence
398
